Moveable Edge Ring Design
YAN; Haoquan ; et al.
U.S. patent application number 16/131822 was filed with the patent office on 2019-01-10 for moveable edge ring design. The applicant listed for this patent is LAM RESEARCH CORPORATION. Invention is credited to Raphael CASAES, Jon MCCHESNEY, Robert Griffith O'NEILL, Alex PATERSON, Haoquan YAN.
| Application Number | 20190013232 16/131822 |
| Document ID | / |
| Family ID | 56408377 |
| Filed Date | 2019-01-10 |






View All Diagrams
| United States Patent Application | 20190013232 |
| Kind Code | A1 |
| YAN; Haoquan ; et al. | January 10, 2019 |
MOVEABLE EDGE RING DESIGN
Abstract
An edge ring is configured to be raised and lowered relative to a pedestal, via one or more lift pins, in a processing chamber of a substrate processing system. The edge ring includes an upper surface, an annular inner diameter, an annular outer diameter, a lower surface, and at least one feature arranged in the lower surface of the edge ring. At least one inner surface of the at least one feature is sloped.
| Inventors: | YAN; Haoquan; (Fremont, CA) ; O'NEILL; Robert Griffith; (Hayward, CA) ; CASAES; Raphael; (Alameda, CA) ; MCCHESNEY; Jon; (Fremont, CA) ; PATERSON; Alex; (San Jose, CA) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Family ID: | 56408377 | ||||||||||
| Appl. No.: | 16/131822 | ||||||||||
| Filed: | September 14, 2018 |
Related U.S. Patent Documents
| Application Number | Filing Date | Patent Number | ||
|---|---|---|---|---|
| 14705430 | May 6, 2015 | |||
| 16131822 | ||||
| 14598943 | Jan 16, 2015 | |||
| 14705430 | ||||
| Current U.S. Class: | 1/1 |
| Current CPC Class: | H01L 21/67069 20130101; H01J 37/023 20130101; H01L 21/68742 20130101; H01L 21/68735 20130101; H01J 37/32642 20130101; H01J 37/32715 20130101; H01J 37/20 20130101; H01J 37/32623 20130101 |
| International Class: | H01L 21/687 20060101 H01L021/687; H01J 37/32 20060101 H01J037/32; H01J 37/02 20060101 H01J037/02; H01L 21/67 20060101 H01L021/67; H01J 37/20 20060101 H01J037/20 |
Claims
1. An edge ring configured to be raised and lowered relative to a pedestal, via one or more lift pins, in a processing chamber of a substrate processing system, the edge ring comprising: an upper surface; an annular inner diameter; an annular outer diameter; a lower surface; and at least one feature arranged in the lower surface of the edge ring, wherein at least one inner surface of the at least one feature is sloped.
2. The edge ring of claim 1, wherein at least two inner surfaces of the at least one feature are sloped.
3. The edge ring of claim 1, wherein the at least one feature is triangular in at least one cross-sectional view.
4. The edge ring of claim 1, wherein the annular inner diameter of the edge ring is configured to overlap an upper plate of the pedestal.
5. The edge ring of claim 4, wherein the at least one feature is arranged in a portion of the lower surface of the edge ring overlapping the upper plate of the pedestal.
6. The edge ring of claim 1, wherein the lower surface of the edge ring is arranged to receive the one or more lift pins.
7. The edge ring of claim 1, wherein the at least one feature comprises a plurality of features each having at least one inner surface that is sloped.
8. The edge ring of claim 7, wherein the plurality of features are circumferentially arranged in a spaced relationship around the lower surface of the edge ring.
9. The edge ring of claim 8, wherein the plurality of features is arranged to align the edge ring relative to the one or more lift pins.
10. The edge ring of claim 8, wherein the plurality of features is arranged to self-center the edge ring relative to the pedestal.
11. The edge ring of claim 1, wherein the at least one feature corresponds to a groove.
12. A pedestal comprising the edge ring of claim 1.
13. A system comprising the pedestal of claim 12 and further comprising an actuator configured to raise and lower the one or more lift pins to raise and lower the edge ring.
Description
CROSS-REFERENCE TO RELATED APPLICATIONS
[0001] The present disclosure is a continuation of U.S. patent application Ser. No. 14/705,430, filed on May 6, 2015, which is a continuation-in-part of U.S. patent application Ser. No. 14/598,943, filed on Jan. 22, 2015. The entire disclosures of the applications referenced above are incorporated herein by reference.
FIELD
[0002] The present disclosure relates to substrate processing systems, and more particularly to edge coupling rings of substrate processing systems.
BACKGROUND
[0003] The background description provided here is for the purpose of generally presenting the context of the disclosure. Work of the presently named inventors, to the extent it is described in this background section, as well as aspects of the description that may not otherwise qualify as prior art at the time of filing, are neither expressly nor impliedly admitted as prior art against the present disclosure.
[0004] Substrate processing systems may be used to perform etching and/or other treatment of substrates such as semiconductor wafers. A substrate may be arranged on a pedestal in a processing chamber of the substrate processing system. For example during etching in a plasma enhanced chemical vapor deposition (PECVD) process, a gas mixture including one or more precursors is introduced into the processing chamber and plasma is struck to etch the substrate.
[0005] Edge coupling rings have been used to adjust an etch rate and/or etch profile of the plasma near a radially outer edge of the substrate. The edge coupling ring is typically located on the pedestal around the radially outer edge of the substrate. Process conditions at the radially outer edge of the substrate can be modified by changing a position of the edge coupling ring, a shape or profile of an inner edge of the edge coupling ring, a height of the edge coupling ring relative to an upper surface of the substrate, a material of the edge coupling ring, etc.
[0006] Changing the edge coupling ring requires the processing chamber to be opened, which is undesirable. In other words, an edge coupling effect of the edge coupling ring cannot be altered without opening the processing chamber. When the edge coupling ring is eroded by plasma during etching, the edge coupling effect changes. Correcting erosion of the edge coupling ring requires the processing chamber to be opened in order to replace the edge coupling ring.
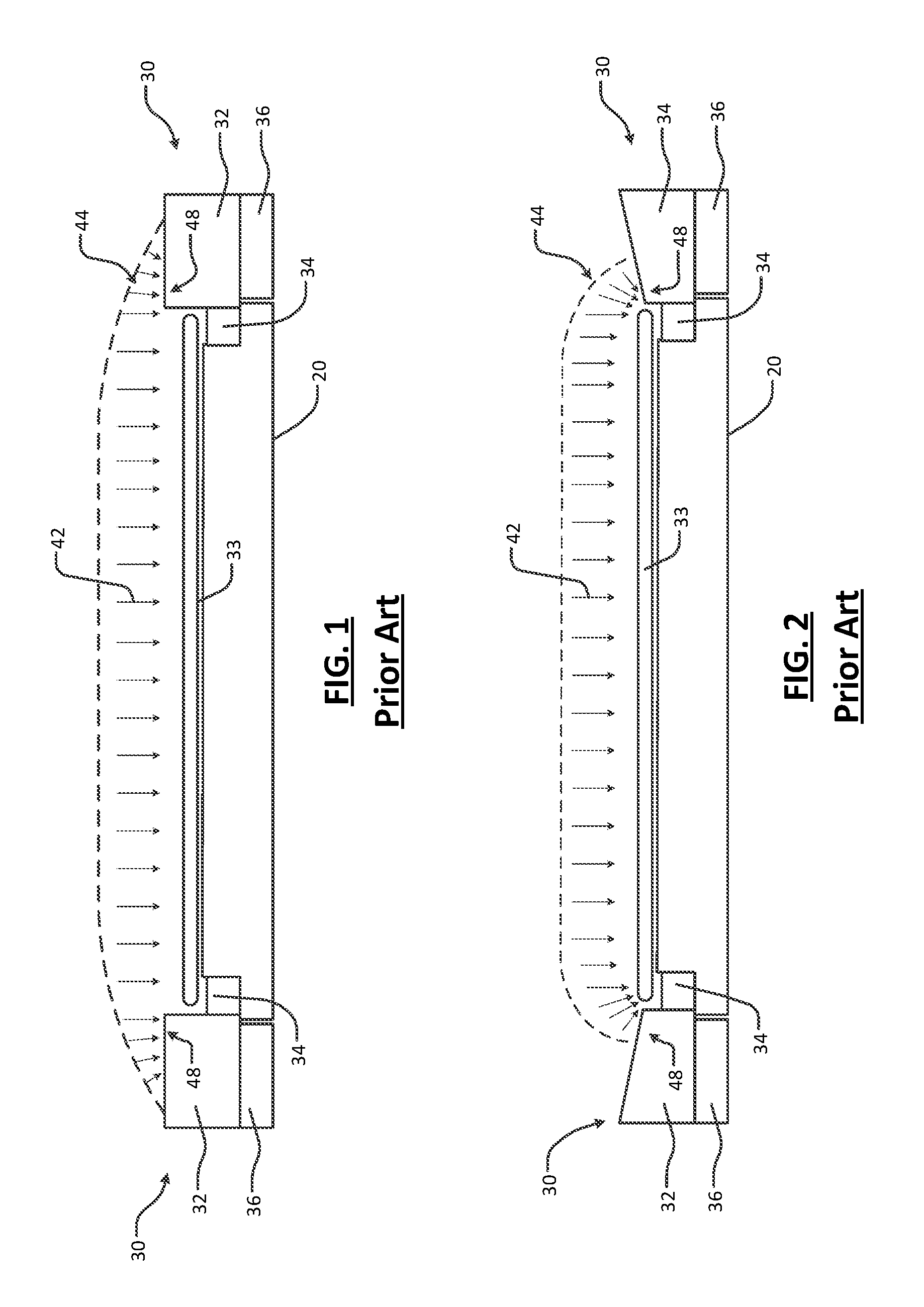
[0007] Referring now to FIGS. 1-2, a substrate processing system may include a pedestal 20 and an edge coupling ring 30. The edge coupling ring 30 may include a single piece or two or more portions. In the example in FIGS. 1-2, the edge coupling ring 30 includes a first annular portion 32 arranged near a radially outer edge of a substrate 33. A second annular portion 34 is located radially inwardly from the first annular portion below the substrate 33. A third annular portion 36 is arranged below the first annular portion 32. During use, plasma 42 is directed at the substrate 33 to etch the exposed portions of the substrate 33. The edge coupling ring 30 is arranged to help shape the plasma such that uniform etching of the substrate 33 occurs.
[0008] In FIG. 2, after the edge coupling ring 30 has been used, an upper surface of a radially inner portion of the edge coupling ring 30 may exhibit erosion as identified at 48. As a result, plasma 42 may tend to etch a radially outer edge of the substrate 33 at a faster rate than etching of radially inner portions thereof as can be seen at 44.
SUMMARY
[0009] A substrate processing system includes a processing chamber and a pedestal arranged in the processing chamber. An edge coupling ring is arranged adjacent to a radially outer edge of the pedestal. A first actuator is configured to selectively move the edge coupling ring to a raised position relative to the pedestal to provide clearance between the edge coupling ring and the pedestal to allow a robot arm to remove the edge coupling ring from the processing chamber.
[0010] In other features, a lifting ring is arranged below at least part of the edge coupling ring. The first actuator biases the lifting ring and the lifting ring biases the edge coupling ring. A pillar is arranged between the first actuator and the lifting ring. A robot arm is configured to remove the edge coupling ring from the processing chamber when the edge coupling ring and the lifting ring are in a raised position. A holder is connected to the robot arm. The holder includes a self-centering feature that mates with a self-centering feature on the edge coupling ring. The edge coupling ring includes a self-centering feature that mates with a self-centering feature on the lifting ring.
[0011] In other features, a bottom edge coupling ring is arranged below at least part of the edge coupling ring and the lifting ring. The bottom edge coupling ring includes a self-centering feature that mates with a self-centering feature on the lifting ring.
[0012] In other features, the lifting ring includes a projection that extends radially outwardly. The projection includes a groove formed on a bottom facing surface thereof. The groove is biased by the pillar when the edge coupling ring is lifted.
[0013] In other features, the robot arm removes the edge coupling ring from the processing chamber without requiring the processing chamber to be opened to atmospheric pressure. A second actuator is configured to move the edge coupling ring relative to the lifting ring to alter an edge coupling profile of the edge coupling ring. A middle edge coupling ring is arranged between at least part of the edge coupling ring and the lifting ring. The middle edge coupling ring remains stationary when the second actuator moves the edge coupling ring relative to the lifting ring.
[0014] In other features, a controller is configured to move the edge coupling ring using the second actuator in response to erosion of a plasma-facing surface of the edge coupling ring. The controller is configured to automatically move the edge coupling ring using the second actuator after the edge coupling ring is exposed to a predetermined number of etching cycles. The controller is configured to automatically move the edge coupling ring using the second actuator after the edge coupling ring is exposed to a predetermined period of etching.
[0015] In other features, a sensor is configured to communicate with the controller and to detect the erosion of the edge coupling ring. A robot arm is configured to communicate with the controller and to adjust a position of the sensor. A controller is configured to move the edge coupling ring to a first position using the second actuator for a first treatment of the substrate using a first edge coupling effect and then to a second position using the second actuator for a second treatment of the substrate using a second edge coupling effect that is different than the first edge coupling effect.
[0016] A method for maintaining an edge coupling ring in a substrate processing system includes arranging an edge coupling ring adjacent to a radially outer edge of a pedestal in a processing chamber; using a first actuator to selectively move the edge coupling ring to a raised position relative to the pedestal; and replacing the edge coupling ring using a robot arm when the edge coupling ring is in the raised position.
[0017] In other features, the method includes arranging a lifting ring below at least part of the edge coupling ring. The actuator biases the lifting ring and the lifting ring biases the edge coupling ring. The method includes arranging a pillar between the first actuator and the lifting ring. The method includes attaching a holder to the robot arm. The holder includes a self-centering feature that mates with a self-centering feature on the edge coupling ring. The method includes using a self-centering feature on the edge coupling ring to mate with a self-centering feature on the lifting ring.
[0018] In other features, the method includes arranging a bottom edge coupling ring below at least part of the edge coupling ring and the lifting ring. The method includes using a self-centering feature on the bottom edge coupling ring to mate with a self-centering feature on the lifting ring. The lifting ring includes a projection that extends radially outwardly. The projection includes a groove formed on a bottom facing surface thereof. The groove is biased by the pillar when the edge coupling ring is lifted.
[0019] In other features, the method includes moving the edge coupling ring relative to the lifting ring using a second actuator to alter an edge coupling profile of the edge coupling ring. The method includes arranging a middle edge coupling ring between at least part of the edge coupling ring and the lifting ring, wherein the middle edge coupling ring remains stationary when the second actuator moves the edge coupling ring relative to the lifting ring.
[0020] In other features, the method includes moving the edge coupling ring using the second actuator in response to erosion of a plasma-facing surface of the edge coupling ring. The method includes automatically moving the edge coupling ring after the edge coupling ring is exposed to a predetermined number of etching cycles. The method includes automatically moving the edge coupling ring after the edge coupling ring is exposed to a predetermined period of etching.
[0021] In other features, the method includes detecting erosion of the edge coupling ring using a sensor. The method includes moving the edge coupling ring to a first position using the second actuator for a first treatment of the substrate using a first edge coupling effect and then to a second position using the second actuator for a second treatment of the substrate using a second edge coupling effect that is different than the first edge coupling effect.
[0022] Further areas of applicability of the present disclosure will become apparent from the detailed description, the claims and the drawings. The detailed description and specific examples are intended for purposes of illustration only and are not intended to limit the scope of the disclosure.
BRIEF DESCRIPTION OF THE DRAWINGS
[0023] The present disclosure will become more fully understood from the detailed description and the accompanying drawings, wherein:
[0024] FIG. 1 is a side cross-sectional view of a pedestal and an edge coupling ring according to the prior art;
[0025] FIG. 2 is a side cross-sectional view of a pedestal and an edge coupling ring according to the prior art after erosion of the edge coupling ring has occurred;
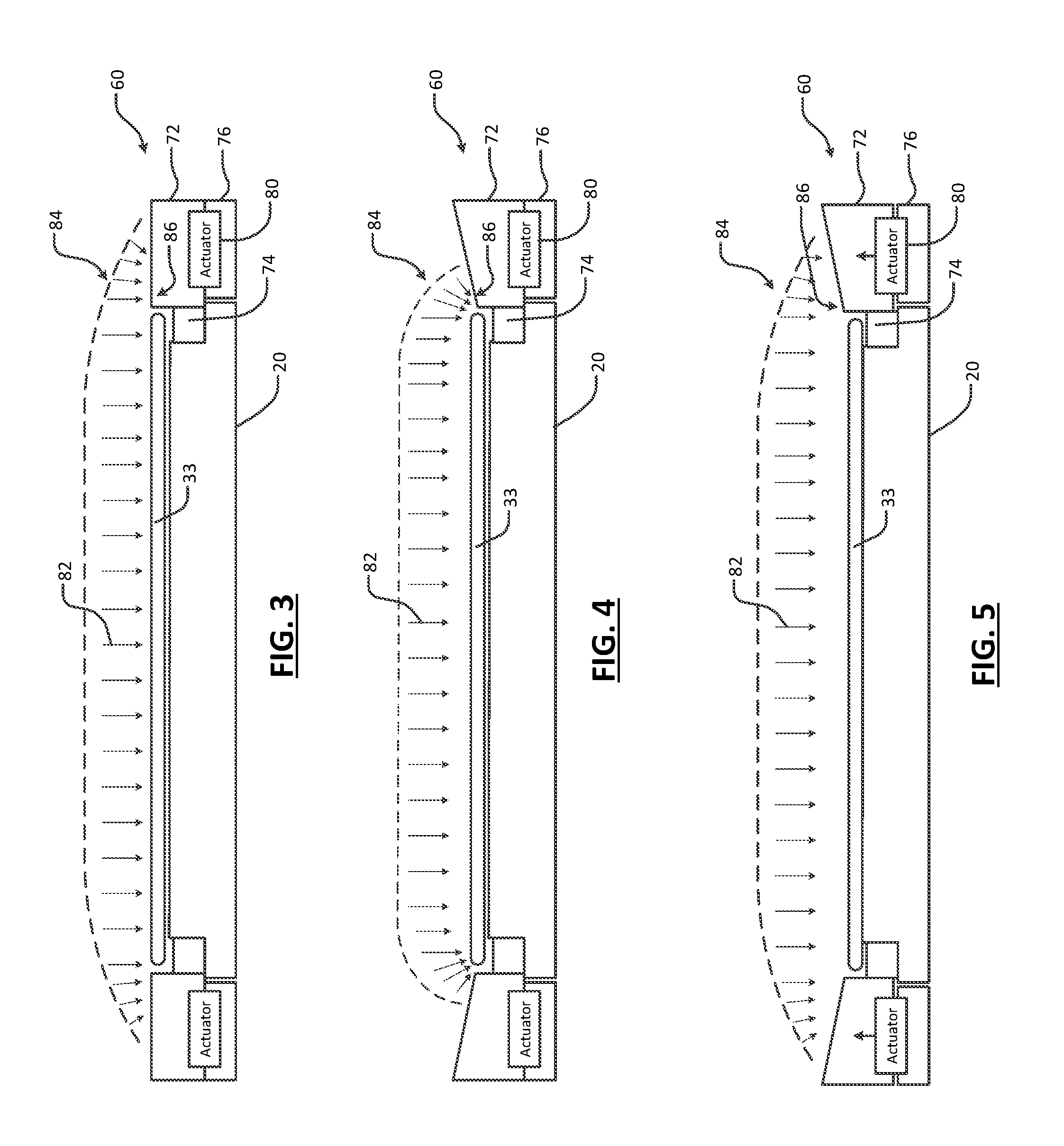
[0026] FIG. 3 is a side cross-sectional view of an example of a pedestal, an edge coupling ring and an actuator according to the present disclosure;
[0027] FIG. 4 is a side cross-sectional view of the pedestal, the edge coupling ring and the actuator of FIG. 3 after erosion of the edge coupling ring has occurred;
[0028] FIG. 5 is a side cross-sectional view of the pedestal, the edge coupling ring and the actuator of FIG. 3 after erosion of the edge coupling ring has occurred and the actuator is moved;
[0029] FIG. 6 is a side cross-sectional view of another example of a pedestal, an edge coupling ring and an actuator located in another position according to the present disclosure;
[0030] FIG. 7 is a side cross-sectional view of another example of a pedestal, an edge coupling ring and a piezoelectric actuator according to the present disclosure;
[0031] FIG. 8 is a side cross-sectional view of the pedestal, the edge coupling ring and the piezoelectric actuator of FIG. 7 after erosion has occurred and the piezoelectric actuator is moved;
[0032] FIG. 9 is a functional block diagram of an example of a substrate processing chamber including a pedestal, an edge coupling ring and an actuator according to the present disclosure;
[0033] FIG. 10 is a flowchart illustrating steps of an example of a method for operating the actuator to move the edge coupling ring according to the present disclosure;
[0034] FIG. 11 is a flowchart illustrating steps of another example of a method for operating the actuator to move the edge coupling ring according to the present disclosure;
[0035] FIG. 12 is a functional block diagram of an example of a processing chamber including an edge coupling ring movable by actuators arranged outside of the processing chamber according to the present disclosure;
[0036] FIGS. 13A and 13B illustrates an example of side-to-side tilting of an edge coupling ring according to the present disclosure;
[0037] FIG. 14 illustrates an example of a method for moving an edge coupling ring during processing of a substrate;
[0038] FIG. 15 is a plan view of an example of a pedestal including an edge coupling ring and a lifting ring;
[0039] FIG. 16 is a side cross-sectional view of an example of the edge coupling ring and lifting ring;
[0040] FIG. 17 is a side cross-sectional view of an example of the edge coupling ring being lifted by the lifting ring and the edge coupling ring being removed by a robot arm;
[0041] FIG. 18 is a side cross-sectional view of an example of a movable edge coupling ring and a lifting ring;
[0042] FIG. 19 is a side cross-sectional view of the movable edge coupling ring of FIG. 18 in a raised position;
[0043] FIG. 20 is a side cross-sectional view of the edge coupling ring of FIG. 18 being lifted by the lifting ring and the edge coupling ring being removed by a robot arm;
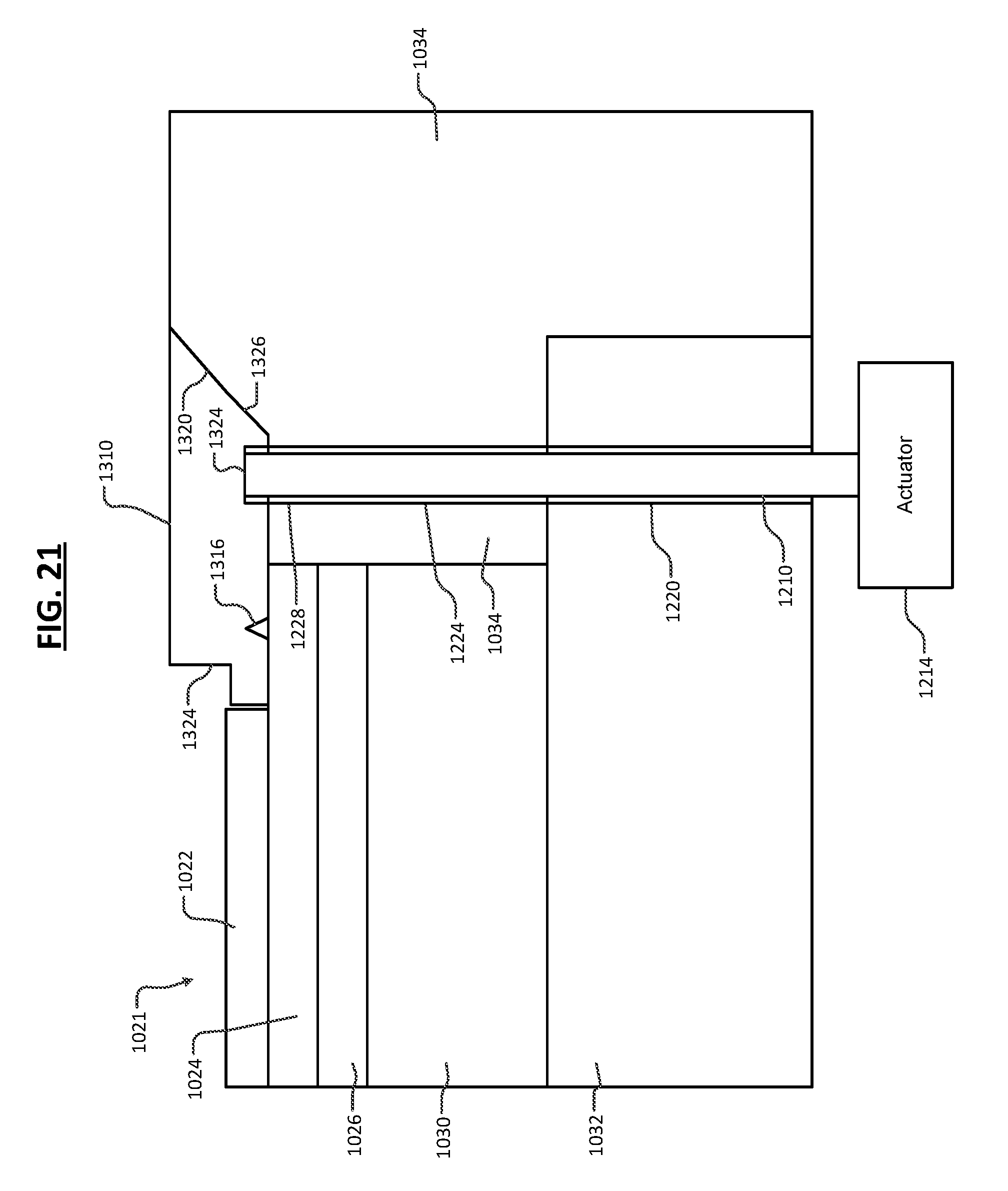
[0044] FIG. 21 is a side cross-sectional view of an example of a movable edge coupling ring;
[0045] FIG. 22 is a side cross-sectional view of the edge coupling ring of FIG. 21 being lifted by the actuator and removed by a robot arm;
[0046] FIG. 23 is an example of a method for replacing an edge coupling ring without opening a processing chamber;
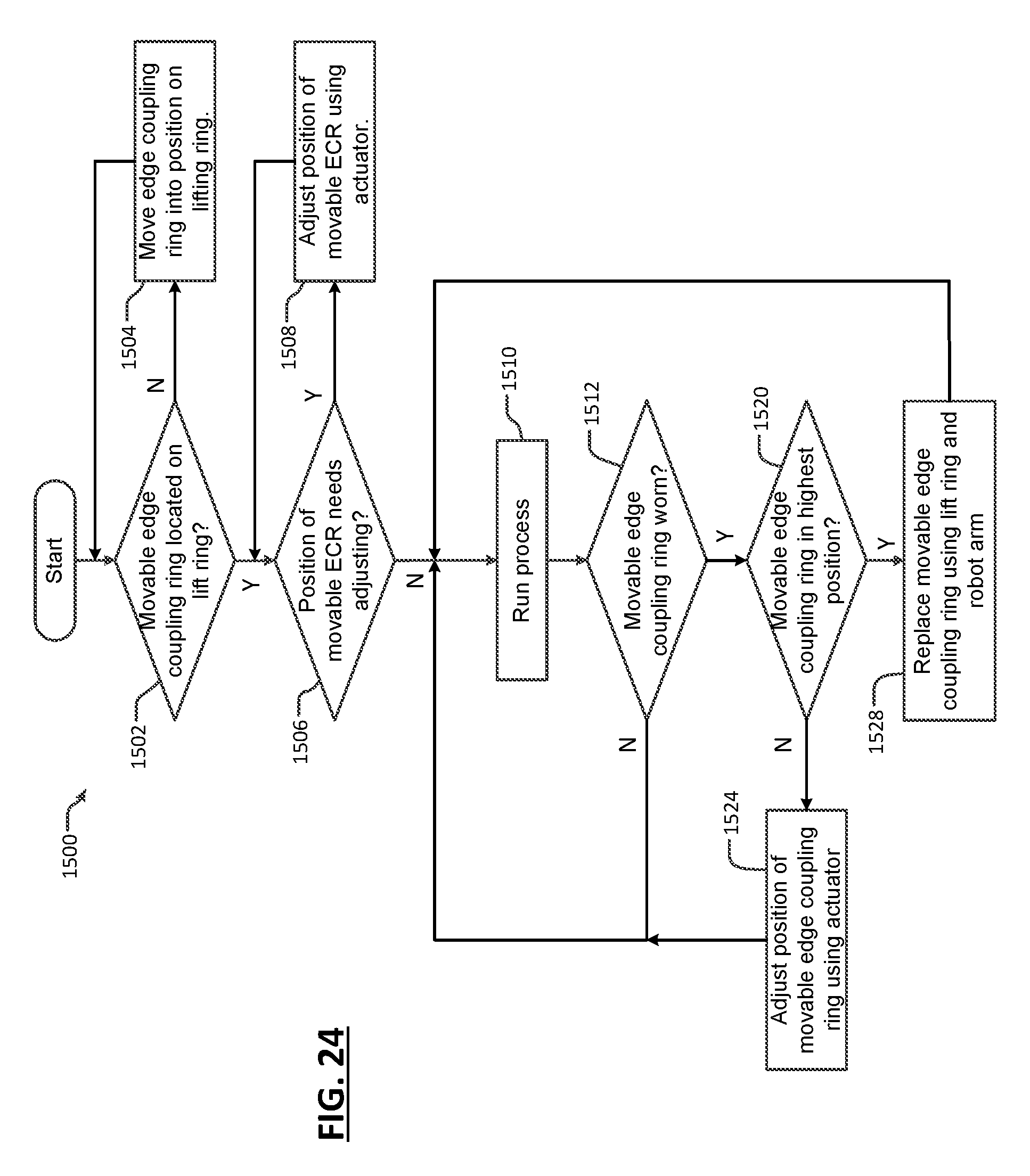
[0047] FIG. 24 is an example of a method for moving an edge coupling ring due to erosion and replacing an edge coupling ring without opening a processing chamber; and
[0048] FIG. 25 is an example of a method for raising an edge coupling ring due to erosion and replacing the edge coupling ring without opening a processing chamber.
[0049] In the drawings, reference numbers may be reused to identify similar and/or identical elements.
DETAILED DESCRIPTION
[0050] The present disclosure allows one or more portions of an edge coupling ring to be moved vertically and/or horizontally relative to a substrate or pedestal in a substrate processing system. The movement changes an edge coupling effect of the plasma relative to the substrate during etching or other substrate treatment without requiring the processing chamber to be opened.
[0051] Referring now to FIGS. 3-5, a substrate processing system includes a pedestal 20 and an edge coupling ring 60. The edge coupling ring 60 may be made of a single portion or two or more portions may be used. In the example in FIGS. 3-5, the edge coupling ring 60 includes a first annular portion 72 arranged radially outside of the substrate 33. A second annular portion 74 is located radially inwardly from the first annular portion 72 below the substrate 33. A third annular portion 76 is arranged below the first annular portion 72.
[0052] An actuator 80 may be arranged in various locations to move one or more portions of the edge coupling ring 60 relative to the substrate 33 as will be described further below. For example only, in FIG. 3 the actuator 80 is arranged between the first annular portion 72 of the edge coupling ring 60 and the third annular portion 76 of the edge coupling ring 60. In some examples, the actuator 80 may include a piezoelectric actuator, a stepper motor, a pneumatic drive, or other suitable actuator. In some examples, one, two, three, or four or more actuators are used. In some examples, multiple actuators are arranged uniformly around the edge coupling ring 60. The actuator(s) 80 may be arranged inside or outside of the processing chamber.
[0053] During use, plasma 82 is directed at the substrate 33 to etch the exposed portions of the substrate 33. The edge coupling ring 60 is arranged to help shape the plasma electric field such that uniform etching of the substrate 33 occurs. As can be seen at 84 and 86 in FIG. 4, one or more portions of the edge coupling ring 60 may be eroded by the plasma 82. As a result of the erosion, non-uniform etching of the substrate 33 may occur near a radially outer edge of the substrate 33. Normally, the process would need to be stopped, the processing chamber opened and the edge coupling ring replaced.
[0054] In FIG. 5, the actuator 80 is used to move one or more portions of the edge coupling ring 60 to alter the position of the one or more portions of the edge coupling ring 60. For example, the actuator 80 may be used to move the first annular portion 72 of the edge coupling ring 60. In this example, the actuator 80 moves the first annular portion 72 of the edge coupling ring 60 in an upward or vertical direction such that an edge 86 of the first annular portion 72 of the edge coupling ring 60 is higher relative to the radially outer edge of the substrate 33. As a result, etch uniformity near the radially outer edge of the substrate 33 is improved.
[0055] Referring now to FIG. 6, as can be appreciated, the actuator may be arranged in one or more other locations and may move in other directions such as horizontal, diagonal, etc. Horizontal movement of the portion of the edge coupling ring may be performed to center the edge coupling effect relative to the substrate. In FIG. 6, an actuator 110 is arranged radially outside of the edge coupling ring 60. In addition, the actuator 110 moves in a vertical (or an up/down) direction as well as in a horizontal (or side to side) direction. Horizontal repositioning may be used when etching of the substrates shows a horizontal offset of the edge coupling ring relative to the substrates. The horizontal offset may be corrected without opening the processing chamber. Likewise, tilting of the edge coupling ring may be performed by actuating some of the actuators differently than others of the actuators to correct or create side-to-side asymmetry.
[0056] Rather than locating the actuator 110 between annular portions of the edge coupling ring, the actuator 110 may also be attached to a radially outer wall or other structure identified at 114. Alternately, the actuator 110 may be supported from below by a wall or other structure identified at 116.
[0057] Referring now to FIG. 7-8, another example of an edge coupling ring 150 and a piezoelectric actuator 154 is shown. In this example, the piezoelectric actuator 154 moves the edge coupling ring 150. The piezoelectric actuator 154 is mounted in the first annular portion 72 and the third annular portion 76 of the edge coupling ring 150. In FIG. 8, the piezoelectric actuator 154 moves the first annular portion 72 of the edge coupling ring 150 to adjust a position of an edge 156 of the first annular portion 72.
[0058] Referring now to FIG. 9, an example of a substrate processing chamber 500 for performing etching using RF plasma is shown. The substrate processing chamber 500 includes a processing chamber 502 that encloses other components of the substrate processing chamber 500 and contains the RF plasma. The substrate processing chamber 500 includes an upper electrode 504 and a pedestal 506 including a lower electrode 507. An edge coupling ring 503 is supported by the pedestal 506 and is arranged around the substrate 508. One or more actuators 505 may be used to move the edge coupling ring 503. During operation, a substrate 508 is arranged on the pedestal 506 between the upper electrode 504 and the lower electrode 507.
[0059] For example only, the upper electrode 504 may include a showerhead 509 that introduces and distributes process gases. The showerhead 509 may include a stem portion including one end connected to a top surface of the processing chamber. A base portion is generally cylindrical and extends radially outwardly from an opposite end of the stem portion at a location that is spaced from the top surface of the processing chamber. A substrate-facing surface or faceplate of the base portion of the showerhead includes a plurality of holes through which process gas or purge gas flows. Alternately, the upper electrode 504 may include a conducting plate and the process gases may be introduced in another manner. The lower electrode 507 may be arranged in a non-conductive pedestal. Alternately, the pedestal 506 may include an electrostatic chuck that includes a conductive plate that acts as the lower electrode 507.
[0060] An RF generating system 510 generates and outputs an RF voltage to one of the upper electrode 504 and the lower electrode 507. The other one of the upper electrode 504 and the lower electrode 507 may be DC grounded, AC grounded or floating. For example only, the RF generating system 510 may include an RF voltage generator 511 that generates the RF voltage that is fed by a matching and distribution network 512 to the upper electrode 504 or the lower electrode 507. In other examples, the plasma may be generated inductively or remotely.
[0061] A gas delivery system 530 includes one or more gas sources 532-1, 532-2, . . . , and 532-N (collectively gas sources 532), where N is an integer greater than zero. The gas sources supply one or more precursors and mixtures thereof. The gas sources may also supply purge gas. Vaporized precursor may also be used. The gas sources 532 are connected by valves 534-1, 534-2, . . . , and 534-N (collectively valves 534) and mass flow controllers 536-1, 536-2, . . . , and 536-N (collectively mass flow controllers 536) to a manifold 540. An output of the manifold 540 is fed to the processing chamber 502. For example only, the output of the manifold 540 is fed to the showerhead 509.
[0062] A heater 542 may be connected to a heater coil (not shown) arranged in the pedestal 506. The heater 542 may be used to control a temperature of the pedestal 506 and the substrate 508. A valve 550 and pump 552 may be used to evacuate reactants from the processing chamber 502. A controller 560 may be used to control components of the substrate processing chamber 500. The controller 560 may also be used to control the actuator 505 to adjust a position of one or more portions of the edge coupling ring 503.
[0063] A robot 570 and a sensor 572 may be used to measure erosion of the edge coupling ring. In some examples, the sensor 572 may include a depth gauge. The robot 570 may move the depth gauge in contact with the edge coupling ring to measure erosion. Alternately, a laser interferometer (with or without the robot 570) may be used to measure erosion without direct contact. The robot 570 may be omitted if the laser interferometer can be positioned with a direct line of sight to the edge coupling ring.
[0064] Another robot arm 573 may be used to deliver and remove substrates onto the pedestal 506. Additionally, the robot arm 573 may be used to deliver unused edge coupling rings onto a lifting ring and to replace used edge coupling rings after sufficient wear as will be described further below in conjunction with FIGS. 15-23. While the same robot arm 573 may be used for both substrates and edge coupling rings, dedicated robot arms may also be used.
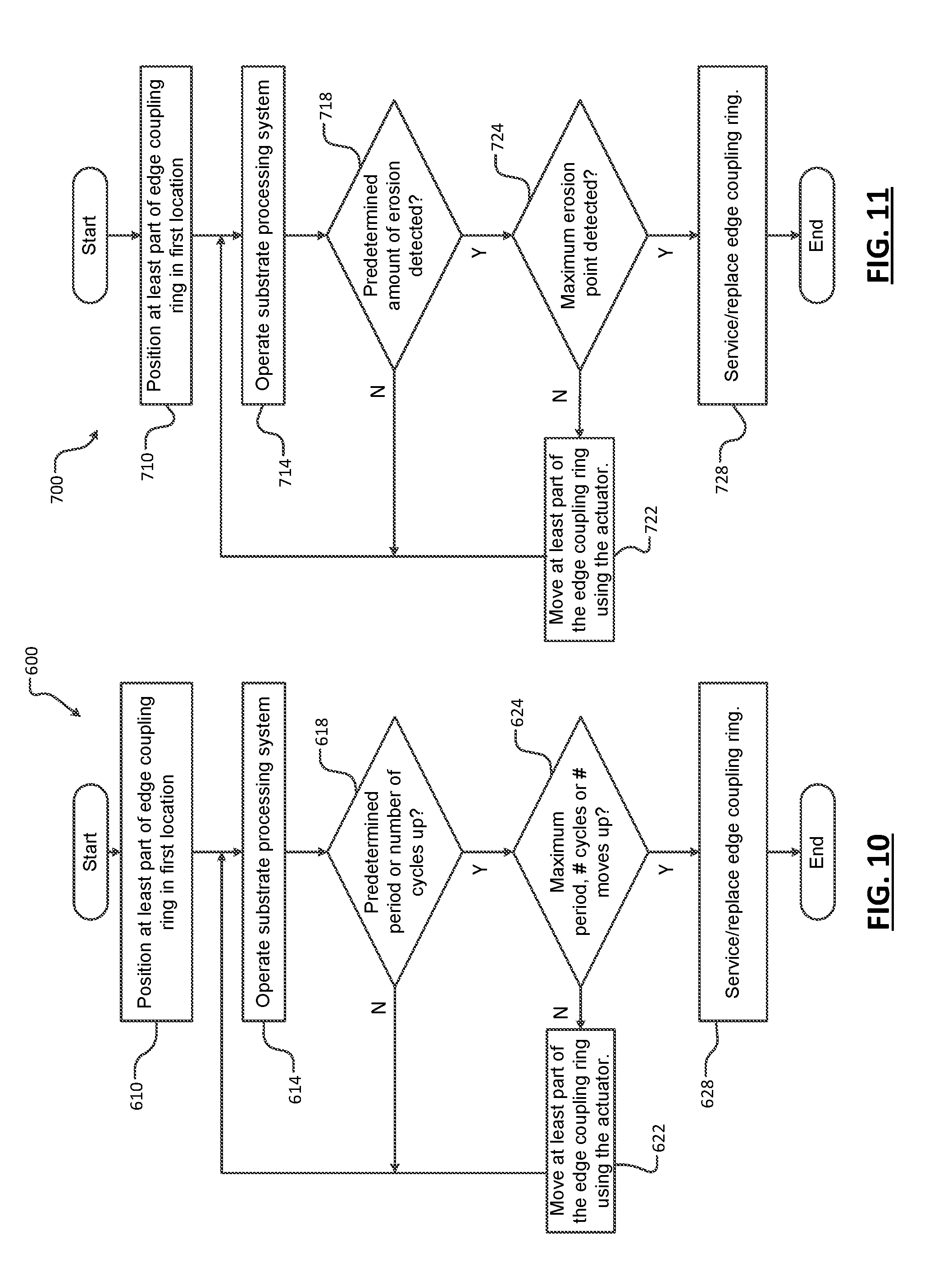
[0065] Referring now to FIG. 10, an example of a method 600 for operating the actuator to move the edge coupling ring is shown. At 610, at least part of an edge coupling ring is positioned in a first location relative to the substrate. At 614, the substrate processing system is operated. The operation may include etching or other treatment of a substrate. At 618, control determines whether a predetermined period of etching or a predetermined number etching cycles have occurred. If the predetermined period or number of cycles is not exceeded as determined at 618, control returns to 614.
[0066] When the predetermined period or number of cycles are up, control determines at 624 whether a maximum predetermined etching period is up, a maximum number of etching cycles has occurred and/or a maximum # of actuator moves have occurred.
[0067] If 624 is false, control moves at least part of the edge coupling ring using the actuator. Movement of the edge coupling ring can be performed automatically, manually or a combination thereof without opening the processing chamber. If 624 is true, control sends a message or otherwise indicates that the edge coupling ring should be serviced/replaced.
[0068] Referring now to FIG. 11, an example of a method 700 for operating the actuator to move the edge coupling ring is shown. At 710, at least part of an edge coupling ring is positioned in a first location relative to the substrate. At 714, the substrate processing system is operated. The operation may include etching or other treatment of a substrate. At 718, control determines whether a predetermined amount of erosion of the edge coupling ring has occurred using a sensor such as a depth gauge or laser interferometer. If 718 is false, control returns to 714.
[0069] When the predetermined amount of erosion has occurred, control determines at 724 whether a maximum amount of erosion has occurred. If 724 is false, control moves at least part of the edge coupling ring using the actuator. Movement of the edge coupling ring can be performed automatically, manually or a combination thereof without opening the processing chamber. If 724 is true, control sends a message or otherwise indicates that the edge coupling ring should be serviced/replaced.
[0070] In addition to the foregoing, a determination of whether or not the edge coupling ring needs to be moved may be based on inspection of etching patterns of the substrates after processing. The actuator may be used to adjust the edge coupling profile of the edge coupling ring without opening the chamber.
[0071] Referring now to FIG. 12, a processing chamber 800 includes an edge coupling ring 60 arranged on a pedestal 20. The edge coupling ring 60 includes one or more portions that are movable by one or more actuators 804 arranged outside of the processing chamber 800. In this example, the first annular portion 72 is movable. The actuators 804 may be connected by mechanical linkage 810 to the first annular portion 72 of the edge coupling ring 60. For example, the mechanical linkage 810 may include a rod member. The mechanical linkage 810 may pass through a hole 811 in a wall 814 of the processing chamber 800. A seal 812 such as an "O"-ring may be used. The mechanical linkage 810 may pass through holes 815 in one or more structures such as the third annular portion 76 of the edge coupling ring 60.
[0072] Referring now to FIGS. 13A and 13B, side-to-side tilting of an edge coupling ring 830 is shown. Side-to-side tilting may be used to correct side-to-side misalignment. In FIG. 13A, portions 830-1 and 830-2 of an edge coupling ring 830 on opposite sides of the substrate are arranged in a first arrangement 840. The portions 830-1 and 830-2 may be generally aligned with portions 832-1 and 832-2 of the edge coupling ring 830. Actuators 836-1 and 836-2 are arranged between the portions 830-1 and 832-1 and 830-2 and 832-2, respectively.
[0073] In FIG. 13B, the actuators 836-1 and 836-2 move the respective portions of the edge coupling ring 830 such that the edge coupling ring 830 moves to a second arrangement 850 that is different than the first arrangement 840 shown in FIG. 13A. As can be appreciated, the substrates may be inspected after treatment and the tilt relative to the substrate may be adjusted as needed without opening the processing chamber.
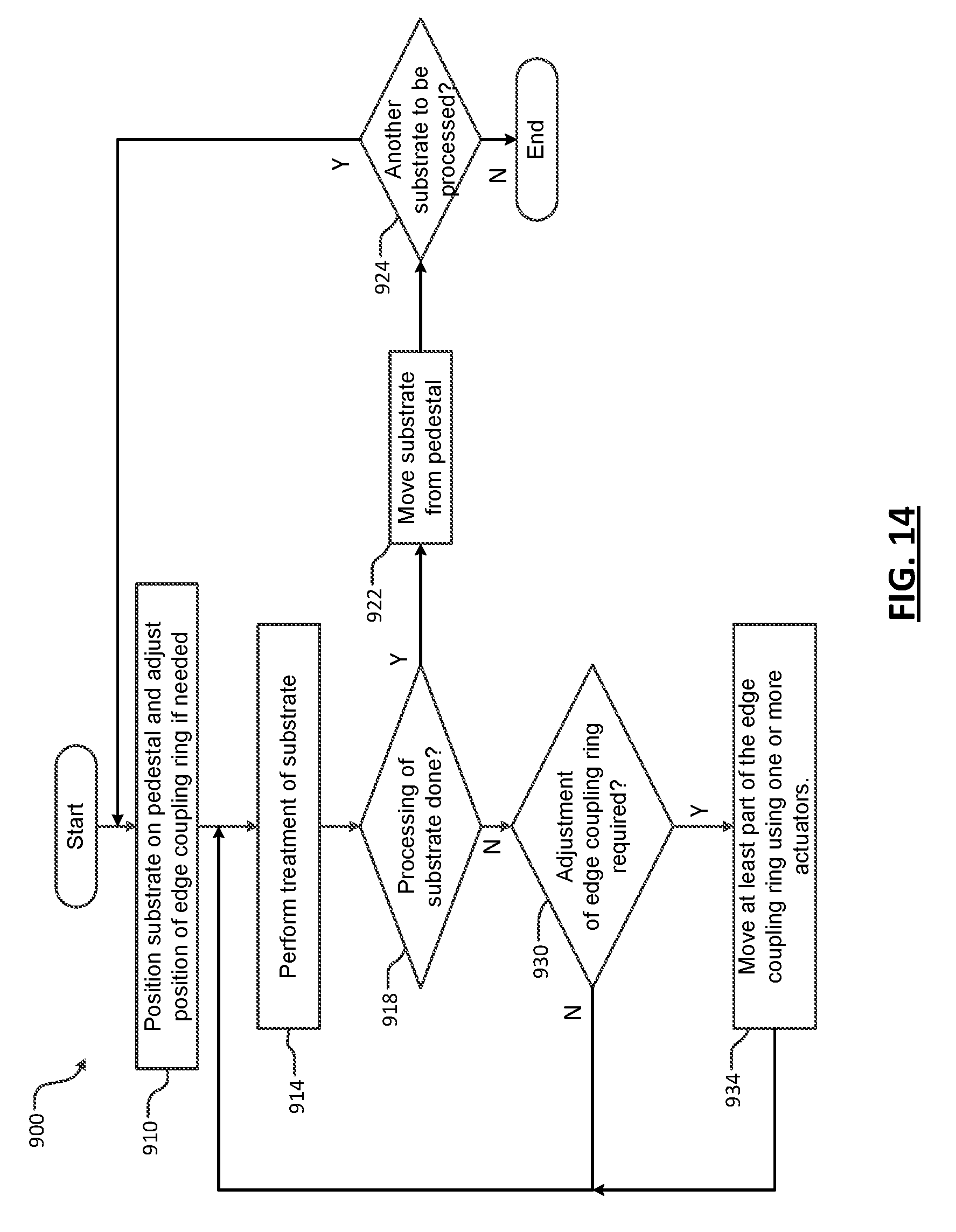
[0074] Referring now to FIG. 14, a method 900 for moving an edge coupling ring during processing of a substrate is shown. In other words, different treatments may be performed on a single substrate in the same processing chamber. The edge coupling effect of the edge coupling ring may be adjusted between the multiple treatments performed on the substrate in the same processing chamber before proceeding to a subsequent substrate. At 910, a substrate is positioned on a pedestal and a position of the edge coupling ring is adjusted if needed. At 914, treatment of the substrate is performed. If processing of the substrate is done as determined at 918, the substrate is removed from the pedestal at 922. At 924, control determines whether another substrate needs to be processed. If 924 is true, the method returns to 910. Otherwise the method ends.
[0075] If 918 is false and the substrate needs additional treatment, the method determines whether adjustment of the edge coupling ring is required at 930. If 930 is false, the method returns to 914. If 930 is true, at least part of the edge coupling ring is moved using one or more actuators at 934 and the method returns to 914. As can be appreciated, the edge coupling ring can be adjusted between treatments of the same substrate in the same processing chamber.
[0076] Referring now to FIG. 15, an edge coupling ring 1014 and a lifting ring 1018 are arranged adjacent to and around an upper surface of a pedestal 1010. The edge coupling ring 1014 includes a radially inner edge that is arranged adjacent to the substrate during etching as described above. The lifting ring 1018 is arranged below at least part of the edge coupling ring 1014. The lifting ring 1018 is used to raise the edge coupling ring 1014 above a surface of the pedestal 1010 when removing the edge coupling ring 1014 using a robot arm. The edge coupling ring 1014 can be removed without requiring the processing chamber to be opened to atmospheric pressure. In some examples, the lifting ring 1018 may optionally include an open portion 1019 between circumferentially spaced ends 1020 to provide clearance for a robot arm to remove the edge coupling ring 1014 as will be described below.
[0077] Referring now to FIGS. 16-17, an example of the edge coupling ring 1014 and lifting ring 1018 are shown in further detail. In the example shown in FIG. 16, the pedestal may include an electrostatic chuck (ESC) generally identified at 1021. The ESC 1021 may include one or more stacked plates such as ESC plates 1022, 1024, 1030 and 1032. The ESC plate 1030 may correspond to a middle ESC plate and the ESC plate 1032 may correspond to an ESC baseplate. In some examples, an O-ring 1026 may be arranged between the ESC plates 1024 and 1030. While a specific pedestal 1010 is shown, other types of pedestals may be used.
[0078] A bottom edge coupling ring 1034 may be arranged below the edge coupling ring 1014 and the lifting ring 1018. The bottom edge coupling ring 1034 may be arranged adjacent to and radially outside of the ESC plates 1024, 1030 and 1032 and the O-ring 1026.
[0079] In some examples, the edge coupling ring 1014 may include one or more self-centering features 1040, 1044 and 1046. For example only, the self-centering features 1040 and 1044 may be triangular-shaped, female self-centering features, although other shapes may be used. The self-centering feature 1046 may be a sloped surface. The lifting ring 1018 may include one or more self-centering features 1048, 1050 and 1051. For example only, the self-centering features 1048 and 1050 may be triangular-shaped, male self-centering features, although other shapes may be used. The self-centering feature 1051 may be a sloped surface having a complementary shape to the self-centering feature 1046. The self-centering feature 1048 on the lifting ring 1018 may mate with the self-centering feature 1044 on the edge coupling ring 1014. The self-centering feature 1050 on the lifting ring 1018 may mate with a self-centering feature 1052 of the bottom edge coupling ring 1034.
[0080] The lifting ring 1018 further includes a projection 1054 that extends radially outwardly. A groove 1056 may be arranged on a bottom-facing surface 1057 of the projection 1054. The groove 1056 is configured to be biased by one end of a pillar 1060 that is connected to and selectively moved vertically by an actuator 1064. The actuator 1064 may be controlled by the controller. As can be appreciated, while a single groove, pillar and actuator are shown, additional grooves, pillars and actuators may be circumferentially arranged in a spaced relationship around the lifting ring 1018 to bias the lifting ring 1018 in an upward direction.
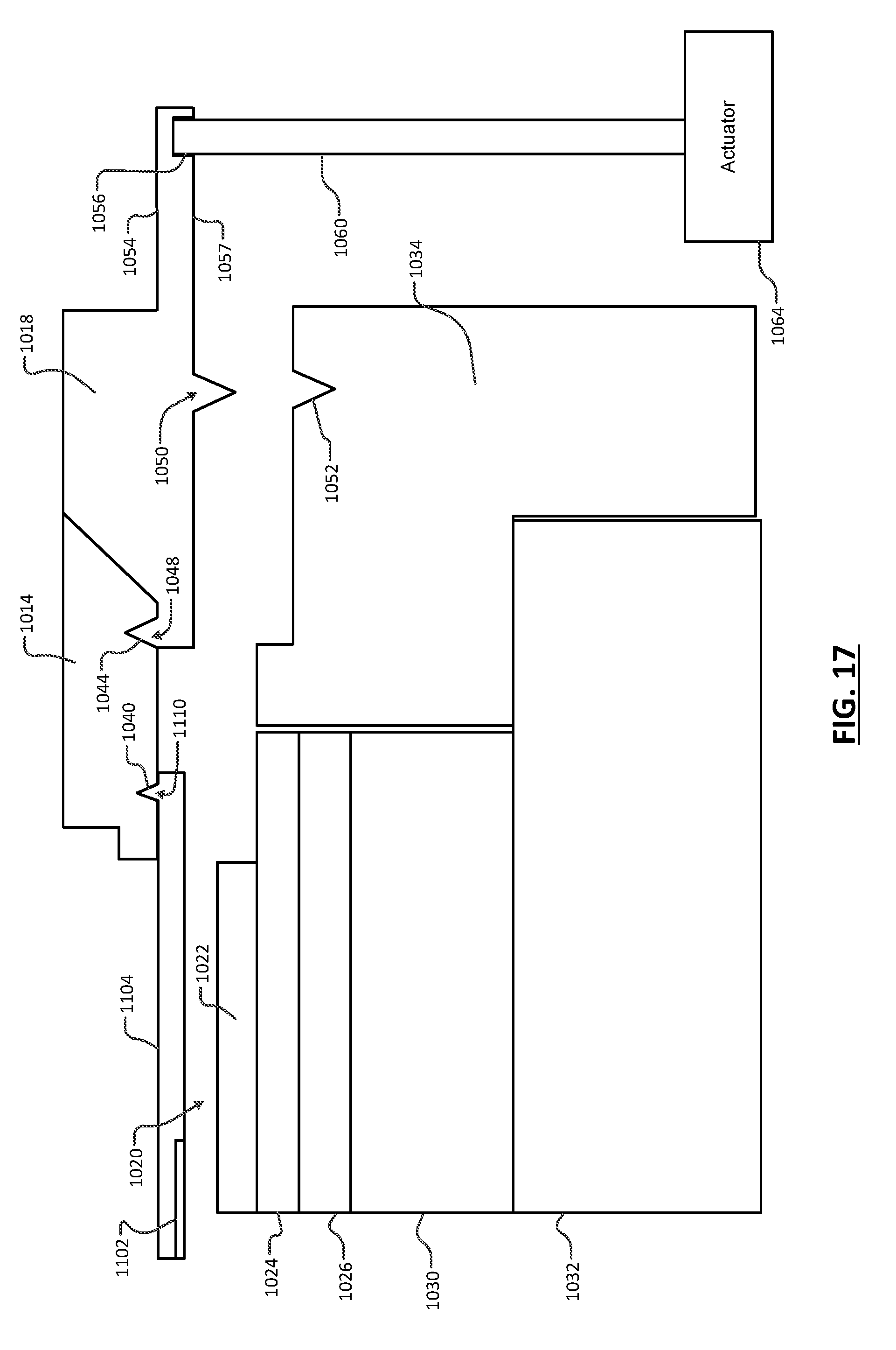
[0081] In FIG. 17, the edge coupling ring 1014 is shown raised in an upward direction by the lifting ring 1018 using the pillar(s) 1060 and the actuator(s) 1064. The edge coupling ring 1014 can be removed from the processing chamber by a robot arm. More particularly, a robot arm 1102 is connected to the edge coupling ring 1014 by a holder 1104. The holder 1104 may include a self-centering feature 1110 that mates with the self-centering feature 1040 on the edge coupling ring 1014. As can be appreciated, the robot arm 1102 and the holder 1104 may bias the edge coupling ring upwardly to clear the self-centering feature 1048 on the lifting ring 1018. Then, the robot arm 1102, the holder 1104 and the edge coupling ring 1014 can be moved out of the processing chamber. The robot arm 1102, the holder 1104 and a new edge coupling ring can be returned and positioned on the lifting ring 1018. Then, the lifting ring 1018 is lowered. The opposite operation may be used to deliver a new edge coupling ring 1014 onto the lifting ring 1018.
[0082] Alternately, instead of lifting the robot arm 1102 and holder 1104 upwardly to lift the edge coupling ring 1014 off of the lifting ring 1018, the robot arm 1102 and holder 1104 can be positioned below and in contact with the raised edge coupling ring 1014. Then, the lifting ring 1018 is lowered and the edge coupling ring 1014 remains on the robot arm 1102 and holder 1104. The robot arm 1102, the holder 1104 and the edge coupling ring 1014 can be removed from the processing chamber. The opposite operation may be used to deliver a new edge coupling ring 1014 onto the lifting ring 1018.
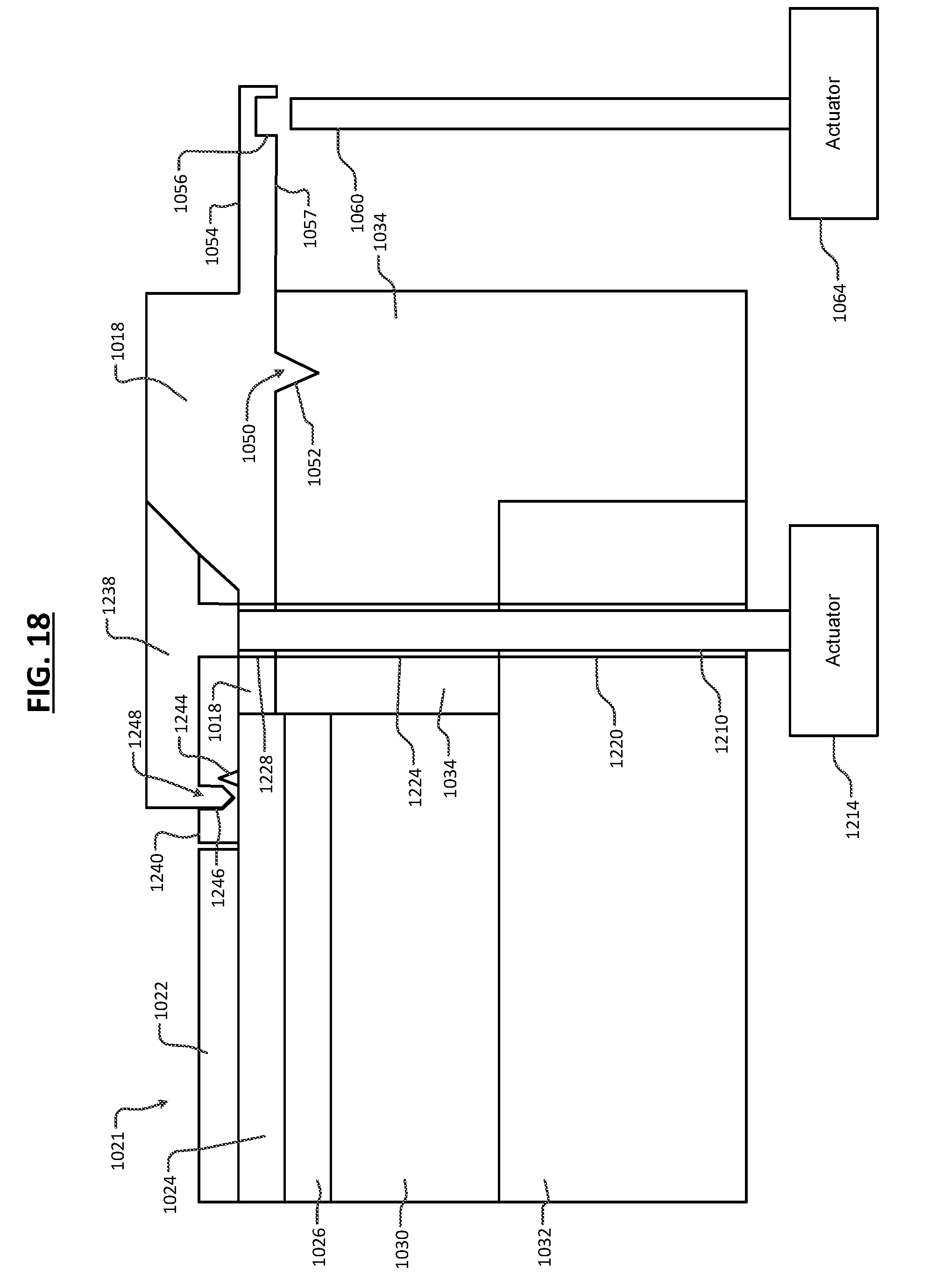
[0083] Referring now to FIGS. 18-20, a movable edge coupling ring 1238 and a lifting ring 1018 are shown. In FIG. 18, one or more pillars 1210 are moved up and down by one or more actuators 1214 through bores 1220, 1224 and 1228 in the ESC baseplate 1032, the bottom edge coupling ring 1034 and the lifting ring 1018, respectively. In this example, a middle edge coupling ring 1240 or spacer is arranged between the movable edge coupling ring 1238 and the lifting ring 1018. The middle edge coupling ring 1240 may include self-centering features 1244 and 1246. A corresponding self-centering feature 1248 may be provided on the movable edge coupling ring 1238. The self-centering feature 1248 mates with the self-centering feature 1246 on the middle edge coupling ring 1240.
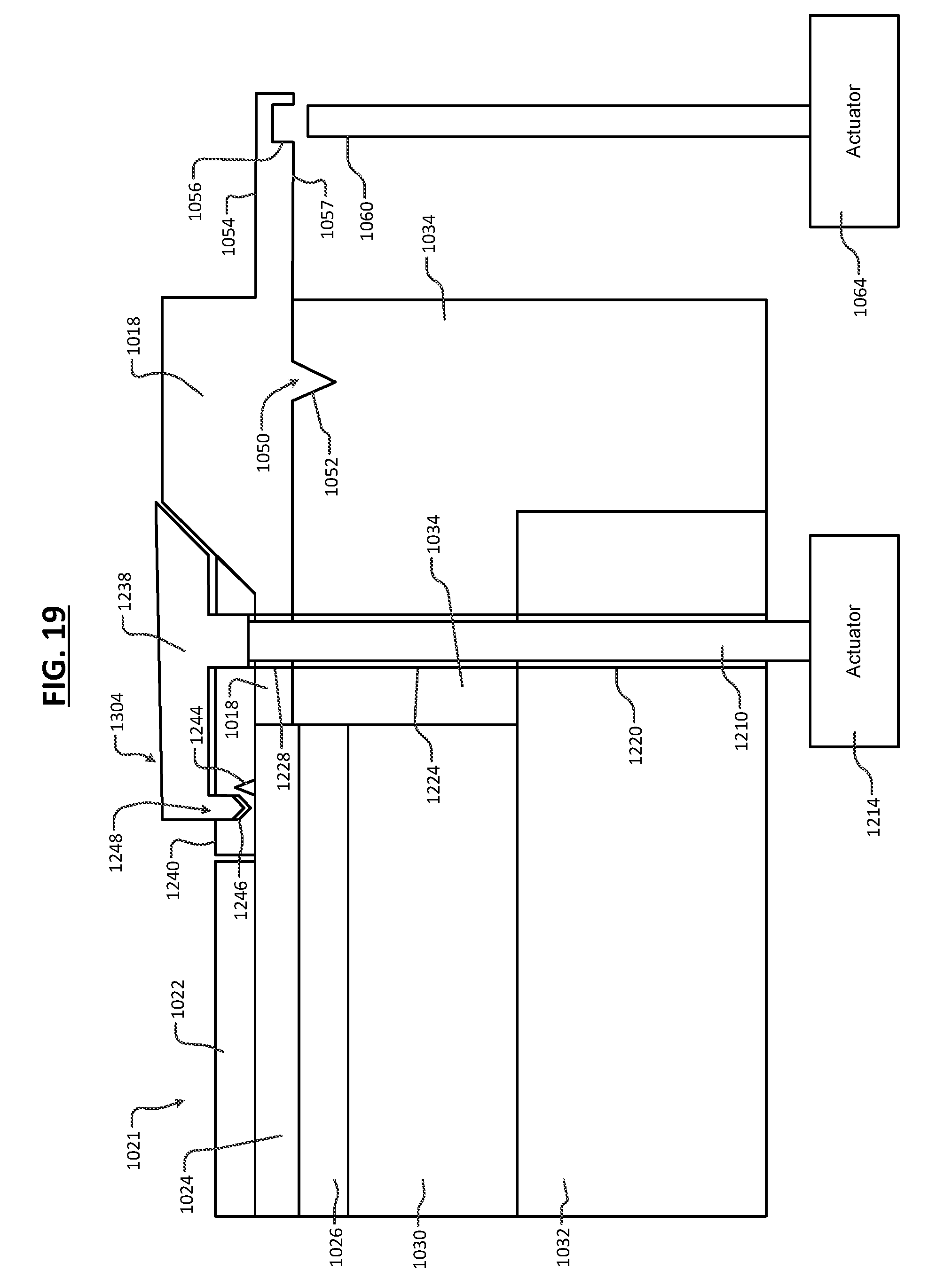
[0084] As is described in detail above, erosion of an upwardly facing surface of the movable edge coupling ring 1238 may occur during use. This, in turn, may alter the profile of the plasma. The movable edge coupling ring 1238 may be selectively moved in an upward direction using the pillars 1210 and the actuators 1214 to alter the profile of the plasma. In FIG. 19, the movable edge coupling ring 1238 of FIG. 18 is shown in a raised position. The middle edge coupling ring 1240 may remain stationary. Eventually, the movable edge coupling ring 1238 may be moved one or more times and then the edge coupling ring 1238 and the middle edge coupling ring 1240 may be replaced.
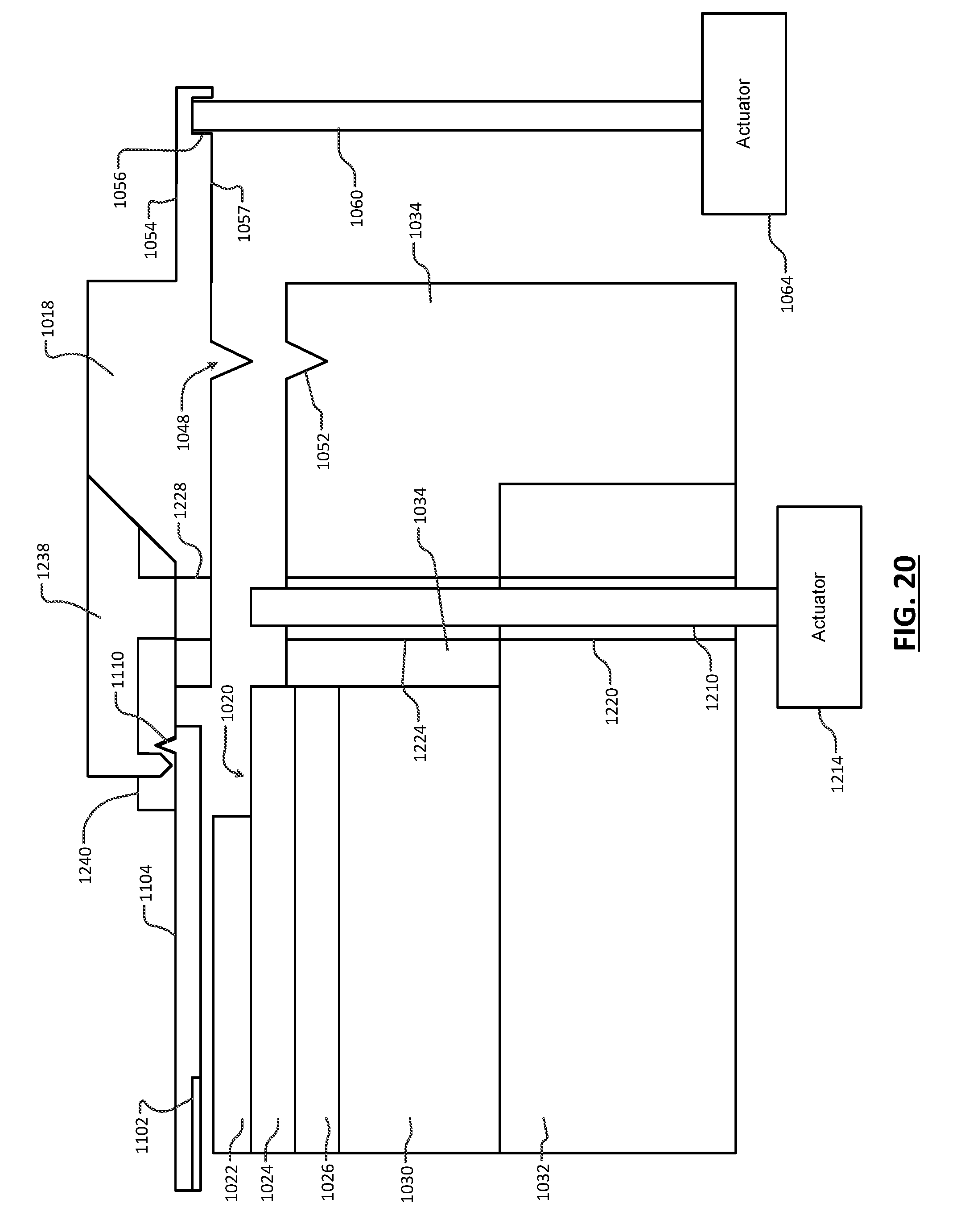
[0085] In FIG. 20, the actuator 1214 is returned to a lowered state and the actuator 1064 is moved to a raised state. The edge coupling ring 1238 and the middle edge coupling ring 1240 are lifted by the lifting ring 1018 and the movable edge coupling ring 1238 may be removed by the robot arm 1102 and the holder 1104.
[0086] As can be appreciated, the actuators can be arranged in the processing chamber or outside of the processing chamber. In some examples, the edge coupling rings may be supplied to the chamber via a cassette, loadlock, transfer chambers and the like. Alternatively, the edge coupling rings may be stored outside of the processing chamber but inside of the substrate processing tool.
[0087] Referring now to FIGS. 21-22, the lifting ring can be omitted in some examples. An edge coupling ring 1310 is arranged on the bottom edge coupling ring 1034 and a radially outer edge of the pedestal. The edge coupling ring 1310 may include one or more self-centering features 1316 and 1320. The edge coupling ring 1310 may further include a groove 1324 for receiving a top surface of the pillar 1210, which is biased by the actuator 1214. The self-centering feature 1320 may be arranged against a corresponding self-centering feature 1326 of the bottom edge coupling ring 1034. In some examples, the self-centering features 1320 and 1326 are inclined planes.
[0088] In FIG. 22, the actuator 1214 and the pillar 1210 bias the edge coupling ring 1310 upwardly to remove the edge coupling ring 1310 or to adjust a plasma profile after erosion has occurred. The robot arm 1102 and the holder 1104 can be moved into position below the edge coupling ring 1310. The self-centering feature 1316 may be engaged by the self-centering feature 1110 on the holder 1104 connected to the robot arm 1102. Either the robot arm 1102 moves in an upward direction to provide clearance between the groove 1324 and the pillar 1210 or the pillar 1210 is moved downwardly by the actuator 1214 to provide clearance for the groove 1324.
[0089] Referring now to FIG. 23, a method 1400 for replacing an edge coupling ring without opening a processing chamber to atmospheric pressure is shown. At 1404, the method determines whether the edge coupling ring is located on the lifting ring. If 1404 is false, the method moves an edge coupling ring into position on the lifting ring using a robot arm at 1410. After the edge coupling ring is located on the lifting ring in the processing chamber, the process is run at 1410. At 1412, the method determines whether the edge coupling ring is worn using any of the criteria described above. If 1412 is false, the method returns to 1410 and the process may be run again. If the edge coupling ring is determined to be worn at 1412, the edge coupling ring is replaced at 1416 and the method continues at 1410.
[0090] Referring now to FIG. 24, a method 1500 adjusts a position of the movable edge coupling ring as needed to offset for erosion and selectively replaces the movable edge coupling ring when the movable edge coupling ring is determined to be worn. At 1502, the method determines whether a movable edge coupling ring is located on the lifting ring. If 1502 is false, an edge coupling ring is moved into position on the lifting ring at 1504 and the method continues at 1502.
[0091] If 1502 is true, the method determines whether a position of the movable edge coupling ring needs to be adjusted at 1506. If 1506 is true, the method adjusts a position of the movable edge coupling ring using an actuator and returns to 1506. When 1506 is false, the method runs the process at 1510. At 1512, the method determines whether the movable edge coupling ring is worn. If false, the method returns to 1510.
[0092] If 1512 is true, the method determines whether the movable edge coupling ring is in a highest (or fully adjusted) position at 1520. If 1520 is false, the method adjusts a position of the movable edge coupling ring using the actuator 1214 at 1524 and the method returns to 1510. If 1520 is true, the method replaces the movable edge coupling ring using the actuator 1064, the lifting ring 1018 and the robot arm 1102.
[0093] Referring now to FIG. 25, a method 1600 for replacing the edge coupling ring without opening the process chamber to atmospheric pressure is shown. At 1610, the lifting ring and edge coupling ring are biased upwardly using an actuator. At 1620, the robot arm and the holder are moved underneath the edge coupling ring. At 1624, the robot arm is moved upwardly to clear self-centering features of the edge coupling ring or the lifting ring is moved downwardly. At 1628, the robot arm with the edge coupling ring is moved out of the processing chamber. At 1632, the edge coupling ring is detached from the robot arm. At 1636, a replacement edge coupling ring is picked up by the robot arm. At 1638, the edge coupling ring is positioned on the lifting ring and aligned using one or more self-centering features. At 1642, the robot arm is lowered to allow sufficient clearance for the self-centering feature and the robot arm is removed from the chamber. At 1646, the lifting ring and the edge coupling ring are lowered into position.
[0094] The foregoing description is merely illustrative in nature and is in no way intended to limit the disclosure, its application, or uses. The broad teachings of the disclosure can be implemented in a variety of forms. Therefore, while this disclosure includes particular examples, the true scope of the disclosure should not be so limited since other modifications will become apparent upon a study of the drawings, the specification, and the following claims. As used herein, the phrase at least one of A, B, and C should be construed to mean a logical (A OR B OR C), using a non-exclusive logical OR, and should not be construed to mean "at least one of A, at least one of B, and at least one of C." It should be understood that one or more steps within a method may be executed in different order (or concurrently) without altering the principles of the present disclosure.
[0095] In some implementations, a controller is part of a system, which may be part of the above-described examples. Such systems can comprise semiconductor processing equipment, including a processing tool or tools, chamber or chambers, a platform or platforms for processing, and/or specific processing components (a wafer pedestal, a gas flow system, etc.). These systems may be integrated with electronics for controlling their operation before, during, and after processing of a semiconductor wafer or substrate. The electronics may be referred to as the "controller," which may control various components or subparts of the system or systems. The controller, depending on the processing requirements and/or the type of system, may be programmed to control any of the processes disclosed herein, including the delivery of processing gases, temperature settings (e.g., heating and/or cooling), pressure settings, vacuum settings, power settings, radio frequency (RF) generator settings, RF matching circuit settings, frequency settings, flow rate settings, fluid delivery settings, positional and operation settings, wafer transfers into and out of a tool and other transfer tools and/or load locks connected to or interfaced with a specific system.
[0096] Broadly speaking, the controller may be defined as electronics having various integrated circuits, logic, memory, and/or software that receive instructions, issue instructions, control operation, enable cleaning operations, enable endpoint measurements, and the like. The integrated circuits may include chips in the form of firmware that store program instructions, digital signal processors (DSPs), chips defined as application specific integrated circuits (ASICs), and/or one or more microprocessors, or microcontrollers that execute program instructions (e.g., software). Program instructions may be instructions communicated to the controller in the form of various individual settings (or program files), defining operational parameters for carrying out a particular process on or for a semiconductor wafer or to a system. The operational parameters may, in some embodiments, be part of a recipe defined by process engineers to accomplish one or more processing steps during the fabrication of one or more layers, materials, metals, oxides, silicon, silicon dioxide, surfaces, circuits, and/or dies of a wafer.
[0097] The controller, in some implementations, may be a part of or coupled to a computer that is integrated with the system, coupled to the system, otherwise networked to the system, or a combination thereof. For example, the controller may be in the "cloud" or all or a part of a fab host computer system, which can allow for remote access of the wafer processing. The computer may enable remote access to the system to monitor current progress of fabrication operations, examine a history of past fabrication operations, examine trends or performance metrics from a plurality of fabrication operations, to change parameters of current processing, to set processing steps to follow a current processing, or to start a new process. In some examples, a remote computer (e.g. a server) can provide process recipes to a system over a network, which may include a local network or the Internet. The remote computer may include a user interface that enables entry or programming of parameters and/or settings, which are then communicated to the system from the remote computer. In some examples, the controller receives instructions in the form of data, which specify parameters for each of the processing steps to be performed during one or more operations. It should be understood that the parameters may be specific to the type of process to be performed and the type of tool that the controller is configured to interface with or control. Thus as described above, the controller may be distributed, such as by comprising one or more discrete controllers that are networked together and working towards a common purpose, such as the processes and controls described herein. An example of a distributed controller for such purposes would be one or more integrated circuits on a chamber in communication with one or more integrated circuits located remotely (such as at the platform level or as part of a remote computer) that combine to control a process on the chamber.
[0098] Without limitation, example systems may include a plasma etch chamber or module, a deposition chamber or module, a spin-rinse chamber or module, a metal plating chamber or module, a clean chamber or module, a bevel edge etch chamber or module, a physical vapor deposition (PVD) chamber or module, a chemical vapor deposition (CVD) chamber or module, an atomic layer deposition (ALD) chamber or module, an atomic layer etch (ALE) chamber or module, an ion implantation chamber or module, a track chamber or module, and any other semiconductor processing systems that may be associated or used in the fabrication and/or manufacturing of semiconductor wafers.
[0099] As noted above, depending on the process step or steps to be performed by the tool, the controller might communicate with one or more of other tool circuits or modules, other tool components, cluster tools, other tool interfaces, adjacent tools, neighboring tools, tools located throughout a factory, a main computer, another controller, or tools used in material transport that bring containers of wafers to and from tool locations and/or load ports in a semiconductor manufacturing factory.
* * * * *
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
D00010
D00011
D00012
D00013
D00014
D00015

D00016

D00017
D00018

XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.