Vehicle
Schnapp , et al.
U.S. patent number D890,024 [Application Number D/586,719] was granted by the patent office on 2020-07-14 for vehicle. This patent grant is currently assigned to PIAGGIO FAST FORWARD, INC.. The grantee listed for this patent is Piaggio Fast Forward, Inc.. Invention is credited to Jamar A. Bromley, Nazareth V. Ekmekjian, Sasha Priya Hoffman, Rossitza Dimitrova Kotelova, Gregory Stewart Lynn, Jeffrey T. Schnapp.









View All Diagrams
| United States Patent | D890,024 |
| Schnapp , et al. | July 14, 2020 |
Vehicle
Claims
CLAIM The ornamental design for a vehicle, as shown and described.
| Inventors: | Schnapp; Jeffrey T. (Cambridge, MA), Lynn; Gregory Stewart (Venice, CA), Kotelova; Rossitza Dimitrova (Cambridge, MA), Hoffman; Sasha Priya (Boston, MA), Bromley; Jamar A. (Jamaica Plain, MA), Ekmekjian; Nazareth V. (Cambridge, MA) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Applicant: |
|
||||||||||
| Assignee: | PIAGGIO FAST FORWARD, INC.
(Boston, MA) |
||||||||||
| Appl. No.: | D/586,719 | ||||||||||
| Filed: | December 6, 2016 |
| Current U.S. Class: | D12/1 |
| Current International Class: | 1214 |
| Field of Search: | ;D10/102,103,46,98 ;D12/1,107,109,110,111,112,113,16,174,178,179,180,181,190,415,43,598,86 ;D15/17,28 ;D21/419,423,425,433,563,760,763,764,771,779 |
References Cited [Referenced By]
U.S. Patent Documents
| 2267254 | December 1941 | Reilley |
| D517633 | March 2006 | Chen |
| 7188694 | March 2007 | Blair |
| D619929 | July 2010 | Tyler |
| D784852 | April 2017 | Gong |
| D805464 | December 2017 | Ma |
| D840277 | February 2019 | Li |
| 2011/0191013 | August 2011 | Leeser |
| 2011/0209929 | September 2011 | Heinzmann |
| 2014/0277841 | September 2014 | Klicpera |
| 2018/0099720 | April 2018 | Chen |
| 2018/0105033 | April 2018 | Schnapp |
| 2018/0105215 | April 2018 | Schnapp |
| 2018/0154971 | June 2018 | Zuo |
| 2018/0257512 | September 2018 | Chen |
| 2516619 | Feb 2015 | GB | |||
| 3993883 | Oct 2007 | JP | |||
| 0115962 | Mar 2001 | WO | |||
Other References
|
Wu, K., et al. "Dynamic control of two-wheeled mobile robot" Journal of Astronautics, vol. 2, p. 024, 2006. (Translation of Abstract Only). cited by applicant . Zhao, Yudong, et al. "Balancing control of Mobile Manipulator with Sliding mode Controller" In 2015 15th International Conference on Control, Automation and Systems (ICCAS), pp. 802-805, IEEE, Oct. 2015. cited by applicant . Product 1, Photo A1--Front View. cited by applicant . Product 1, Photo A2--Iso Left 1. cited by applicant . Product 1, Photo A3--Iso Right 1. cited by applicant . Product 1, Photo A4--Iso Right 2. cited by applicant . Product 1, Photo A5--Iso Right 3. cited by applicant . Product 1, Photo A6--Side View 1. cited by applicant . Product 1, Photo A7--Side View 2. cited by applicant . Product 1, Photo A8--Side View 3. cited by applicant . Product 1, Photo A9--Side View 4. cited by applicant . Product 1, Photo A10--Side View 5. cited by applicant . Product 1, Photo A11--Top View. cited by applicant . YouTube video uploaded on Feb. 26, 2015 , titled "Still Human 2015 Presentation du Cyborg Vegetal" downloaded from: https://www.youtube.com/watch?v=Ev02Ym2ZVRE on Feb. 7, 2017. cited by applicant . Product 2, Photo B1--Back View. cited by applicant . Product 2, Photo B2--Front View. cited by applicant . Product 2, Photo B3--Iso Left View. cited by applicant . Product 2, Photo B4--Iso Right View. cited by applicant . Product 2, Photo B5--Side View 1. cited by applicant . Product 2, Photo B6--Side View 2. cited by applicant . YouTube video uploaded on Sep. 15, 2016, titled "TwinswHeel Lyon 2016 09 13 EN" downloaded from: https://www.youtube.com/watch?v=ysYtN3Wm5Dw&feature=youtu.be on Jan. 19, 2017. cited by applicant . YouTube video uploaded on Nov. 21, 2016, titled "TwinswHeel M6 1945 2016 11 18" downloaded from: https://www.youtube.com/watch?v=e3laoGU56nY&feature=youtu.be on Jan. 19, 2017. cited by applicant . Blog Jerome Libeskind--Twinswheel A quoi ressemblera le dernier kilometre dans 10 ans? With Machine Translation, 13 pages, Sep. 26, 2016. Retrieved from URL: http://www.logicites.fr/2016/09/26/a-quoi-ressemblera-dernier-k- ilometre-10-ans/. cited by applicant . Beroud, Annick. "L'intralogistique au service de la performance" a la matinale de l'Aslog (with English machine translation) L'antenne, Sep. 27, 2016. Retrieved from URL: http://www.lantenne.com/L-intralogistique-au-service-de-la-performance-a-- la-matinale-de-l-Aslog_a33383.html. cited by applicant . Hay, Benjamin. TwinswHeel, le livreur de colis de demain? (with English machine translation) Tumblr French IoT, Oct. 6, 2016.Retrieved from URL: http://french-iot.tumblr.com/post/151417346436/twinswheel-le-livreur-de-c- olis-de-demain-la. cited by applicant . Product 3, Photo C1--Colors. cited by applicant . Product 3, Photo C2--Front View 1. cited by applicant . Product 3, Photo C3--Front View 2. cited by applicant . Product 3, Photo C4--Iso Back View. cited by applicant . Product 3, Photo C5--Iso Front View. cited by applicant . Product 3, Photo C6--Iso Right View. cited by applicant . Product 3, Photo C7--Side View. cited by applicant . Product 3, Photo C8--Top View 1. cited by applicant . Product 3, Photo C9--Top View 2. cited by applicant . Product 3, Photo C10--Top View 3. cited by applicant . Product 4, Photo D1--Back View. cited by applicant . Product 4, Photo D2--Front View. cited by applicant . Product 4, Photo D3--Iso Left View. cited by applicant . Product 4, Photo D4--Iso Right View 1. cited by applicant . Product 4, Photo D5--Iso Right View 2. cited by applicant . Product 4, Photo D6--Side View 1. cited by applicant . Product 4, Photo D7--Side View 2. cited by applicant . Product 4, Photo D8--Side View 3. cited by applicant . Goher, K. M., et al. "Dynamic Modeling and Control of a Two Wheeled Robotic Vehicle with a Virtual Payload", ARPN Journal of Engineering and Applied Sciences, vol. 6, No. 3, pp. 7-41, Mar. 2011. cited by applicant . Product 1, Photo A1--Back View. cited by applicant . Product 1, Photo A2--Front View. cited by applicant . Product 1, Photo A3--Front View 2. cited by applicant . Product 1, Photo A4--Side View. cited by applicant . Product 2, Photo B1--Front View. cited by applicant . Product 2, Photo B2--Iso. cited by applicant . Product 2, Photo B3--Iso 2. cited by applicant . Product 2, Photo B4--Side View. cited by applicant . Product 3, Photo C1--Back View. cited by applicant . Product 3, Photo C2--Front View. cited by applicant . Product 3, Photo C3--Side View. cited by applicant . Product 3, Photo C4--Top View. cited by applicant . Product 4, Photo D2--Detail view. cited by applicant . Product 4, Photo D3--Front View. cited by applicant . Product 4, Photo D4--Side View. cited by applicant . Product 5, Photo E1--Back View. cited by applicant . Product 5, Photo E2--Bottom view. cited by applicant . Product 5, Photo E3--Front View. cited by applicant . Product 5, Photo E4--Iso Left. cited by applicant . Product 5, Photo E5--Iso Right. cited by applicant . Product 5, Photo E6--Left. cited by applicant . Product 5, Photo E7--Right. cited by applicant . Product 5, Photo E8--Top. cited by applicant . Product 6, Photo F1--Iso. cited by applicant . Product 6, Photo F2--Side View. cited by applicant . Product 6, Photo F3--Tumbleweed. cited by applicant . Product 6, Photo F4--Tumbleweed Side View. cited by applicant . YouTube video uploaded on Sep. 15, 2016, titled "TwinswHeel Lyon 2016 09 13 EN" downloaded from: https://www.youtube.com/iwatch?v=ysYtN3Wm5Dw&feature=youtu.be on Jan. 19, 2017. cited by applicant . Product 1, Photo A1: Cyborg Vegetal, Front View. cited by applicant . Product 1, Photo A2: Cyborg Vegetal, Iso Left View. cited by applicant . Product 1, Photo A3: Cyborg Vegetal, Iso Right View 1. cited by applicant . Product 1, Photo A4: Cyborg Vegetal, Iso Right View 2. cited by applicant . Product 1, Photo A5: Cyborg Vegetal, Iso Right View 3. cited by applicant . Product 1, Photo A6: Cyborg Vegetal, Side View 1. cited by applicant . Product 1, Photo A7: Cyborg Vegetal, Side View 2. cited by applicant . Product 1, Photo A8: Cyborg Vegetal, Side View 3. cited by applicant . Product 1, Photo A9: Cyborg Vegetal, Side View 4. cited by applicant . Product 1, Photo A10: Cyborg Vegetal, Side View 5. cited by applicant . Product 1, Photo A11: Cyborg Vegetal, Top View. cited by applicant . Product 2, Photo B1: Twinswheel, Back View. cited by applicant . Product 2, Photo B2: Twinswheel, Front View. cited by applicant . Product 2, Photo B3: Twinswheel, Iso Left View. cited by applicant . Product 2, Photo B4: Twinswheel, Iso Right View. cited by applicant . Product 2, Photo B5: Twinswheel, Side View 1. cited by applicant . Product 2, Photo B6: Twinswheel, Side View 2. cited by applicant . Product 3, Photo C1: Sony Rolly, Colors. cited by applicant . Product 3, Photo C2: Sony Rolly, Front View 1. cited by applicant . Product 3, Photo C3: Sony Rolly, Front View 2. cited by applicant . Product 3, Photo C4: Sony Rolly, Iso Back View. cited by applicant . Product 3, Photo C5: Sony Rolly, Iso Front View. cited by applicant . Product 3, Photo C6: Sony Rolly, Iso Right View. cited by applicant . Product 3, Photo C7: Sony Rolly, Iso Side View. cited by applicant . Product 3, Photo C8: Sony Rolly, Iso Top View 1. cited by applicant . Product 3, Photo C9: Sony Rolly, Iso Top View 2. cited by applicant . Product 3, Photo C10: Sony Roily, Iso Top View 3. cited by applicant . Product 4, Photo D1: Kugelpanzer, Back View. cited by applicant . Product 4, Photo D2: Kugelpanzer, Front View. cited by applicant . Product 4, Photo D3: Kugelpanzer, Iso Left View. cited by applicant . Product 4, Photo D4: Kugelpanzer, Iso Right View 1. cited by applicant . Product 4, Photo D5: Kugelpanzer, Iso Right View 2. cited by applicant . Product 4, Photo D6: Kugelpanzer, Side View 1. cited by applicant . Product 4, Photo D7: Kugelpanzer, Side View 2. cited by applicant . Product 4, Photo D8: Kugelpanzer, Side View 3. cited by applicant . Hu, Jian, et al. "Analysis of two-wheeled self-balancing mobile robots based on ADRC." Journal of Mechanical & Electrical Engineering, vol. 31, No. 2, pp. 159-164, 2014. (Translation of Abstract Only). cited by applicant . Ji, Pengfei, et al. "Design of Self-balancing Two-wheeled Vehicle Control System Based on STM32" Electronic Science and Technology, vol. 11, p. 29, 2014. (Translation of Abstract Only). cited by applicant . Larimi, S. Reza, et al. "A New Stabilization Algorithm for a Two-Wheeled Mobile Robot Aided by Reaction Wheel" Journal of Dynamic Systems, Measurement, and Control , vol. 137, No. 1, paper 011009, Jan. 2015. cited by applicant . Libeskind, Jerome. Blog Jerome Libeskind, "A quoi ressemblera le dernier kilometre dans 10 ans?" ("What will the last mile look like in 10 years?") TwinswHeel, Sep. 26, 2016. retrieved from URL: http://www.logicites.fr/2016/09/26/a-quoi-ressemblera-demier-kilometre-10- -ans/ (with English machine translation). cited by applicant . Rahman, M.T. Abdul, et al. "Centre of Gravity (C.O.G.)-Based Analysis on the Dynamics of the Extendable Double-Link Two-Wheeled Mobile Robot" In IOP Conference Series: Materials Science and Engineering, vol. 53, No. 1, paper 012079, 2013. cited by applicant . Ruan, X., et al. "Research on stable control for two-wheeled self-balancing robot in complex environment" Beijing Gongye Daxue Xuebao (Journal of Beijing University of Technology), vol. 37, No. 9, pp. 1310-1316, Sep. 2011. (Translation of Abstract Only). cited by applicant . Sales, Jorge, et al. "CompaRob: The Shopping Cart Assistant Robot" International Journal of Distributed Sensor Networks, vol. 2016, Article ID 4781280, 15 pages, 2016. cited by applicant . Van Der Wijk, Volkert, et al. "Force Balancing of Variable Payload by Active Force-Balanced Reconfiguration of the Mechanism" in ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots, pp. 323-330, IEEE, Jun. 2009. cited by applicant . Wang, Kun, et al. "Enhanced active dynamic balancing of the planar robots using a three-rotating-bar balancer" Advances in Mechanical Engineering, vol. 8, No. 4, 1687814016643885, Apr. 2016. cited by applicant. |
Primary Examiner: Krakower; Susan E
Assistant Examiner: Hsu; Jerry Shiuan-Hua
Attorney, Agent or Firm: Onello & Mello, LLP
Description
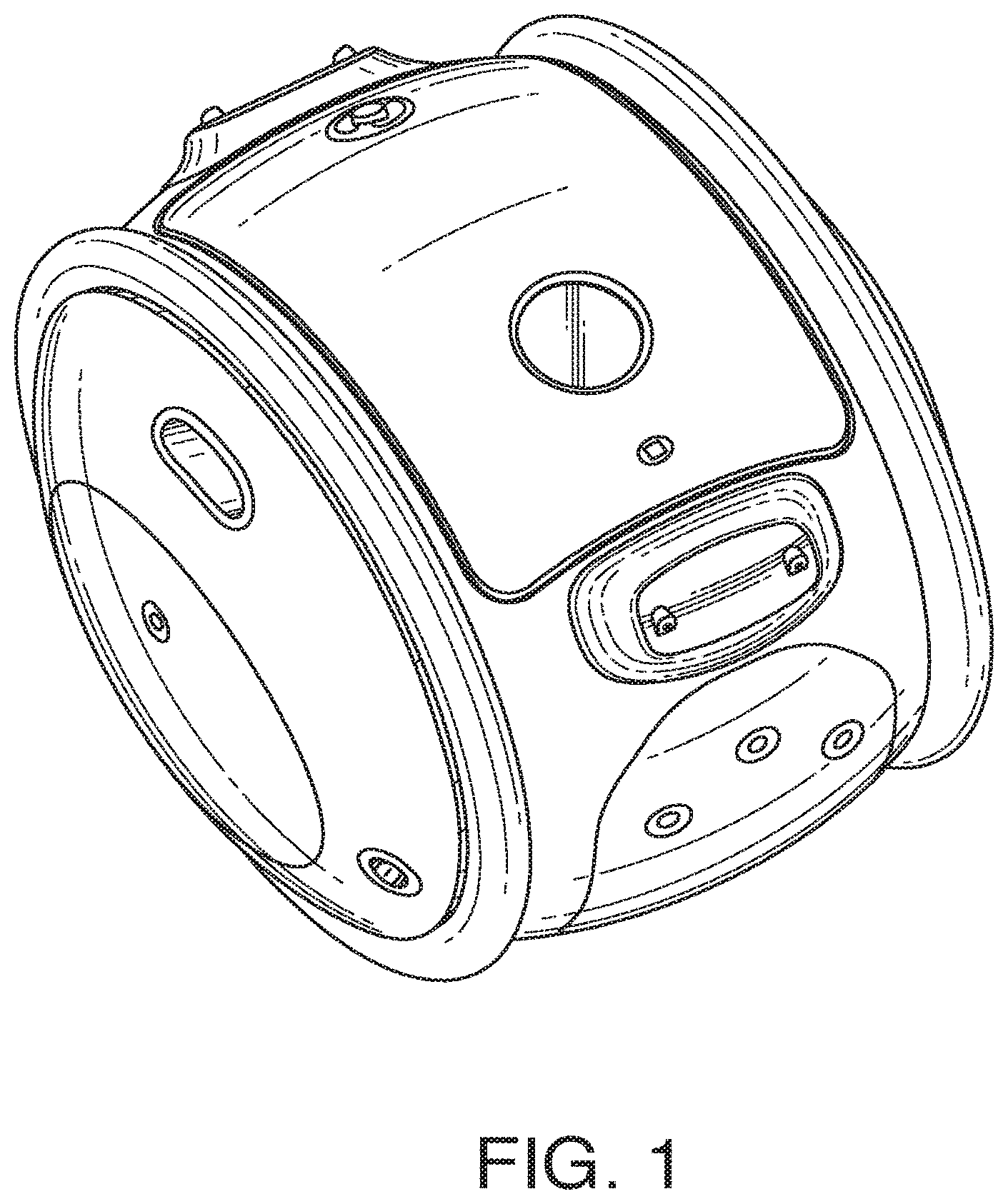
FIG. 1 is a top-front perspective view of the vehicle, showing our new design;
FIG. 2 is a top view thereof;
FIG. 3 is a bottom view thereof;
FIG. 4 is a front side view thereof;
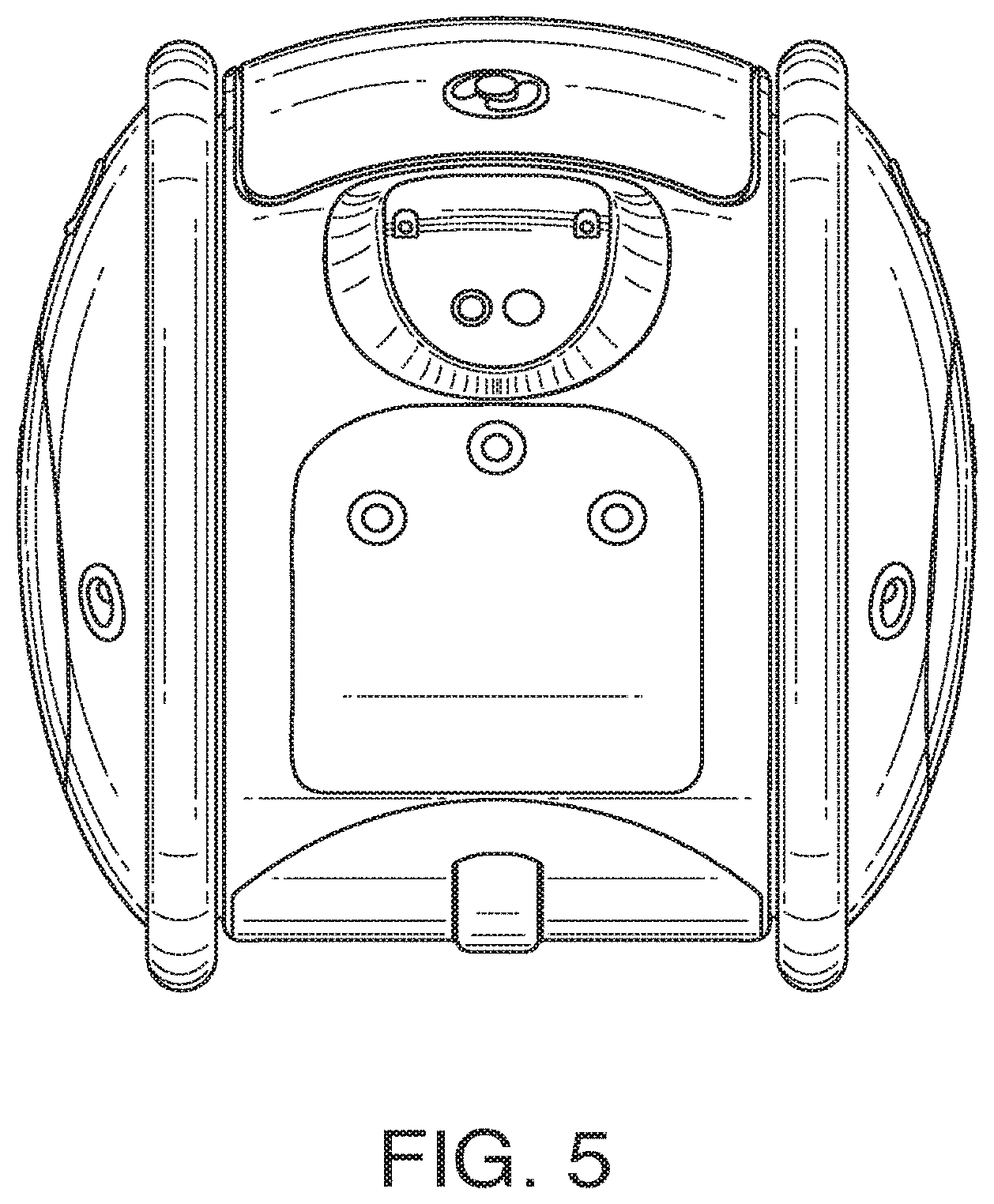
FIG. 5 is a rear side view thereof;
FIG. 6 is a left side view thereof, the right side view being a mirror image;
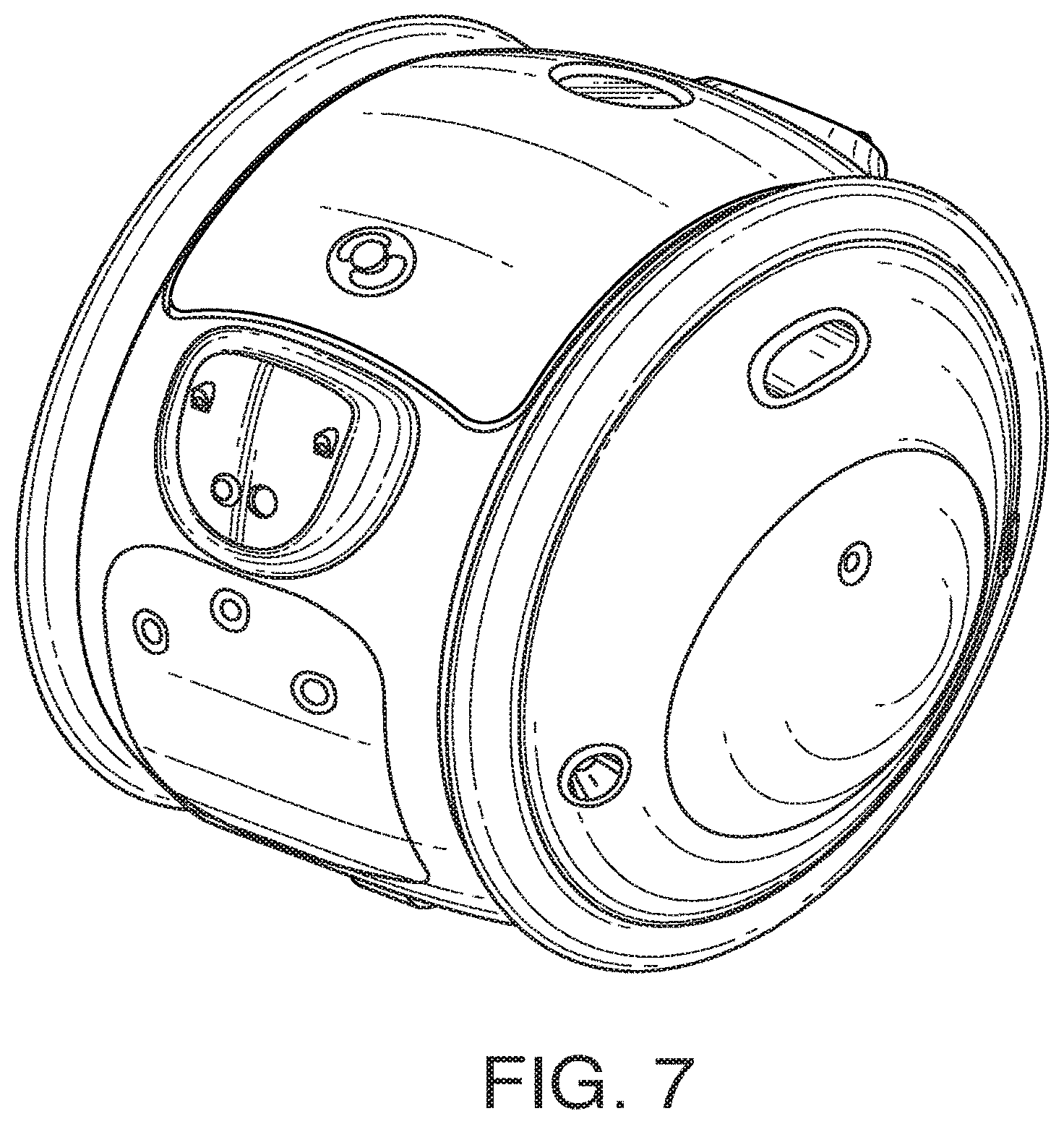
FIG. 7 is a top-rear perspective view thereof;
FIG. 8 is a top-front perspective view of a second embodiment of the vehicle;
FIG. 9 is a top view thereof;
FIG. 10 is a bottom view thereof;
FIG. 11 is a front side view thereof;
FIG. 12 is a rear side view thereof;
FIG. 13 is a left side view thereof, the right side view being a mirror image;
FIG. 14 is a top-rear perspective view thereof;
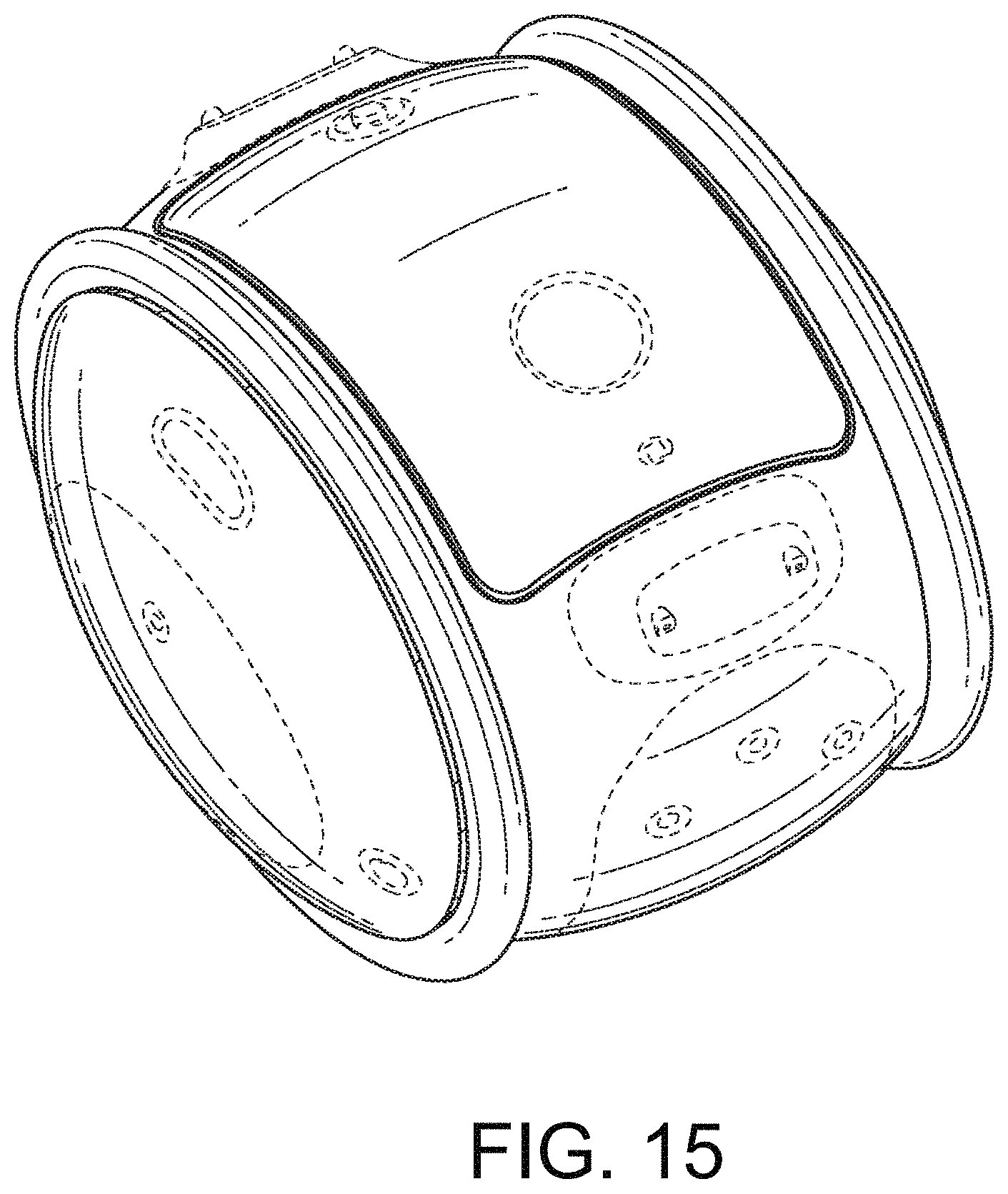
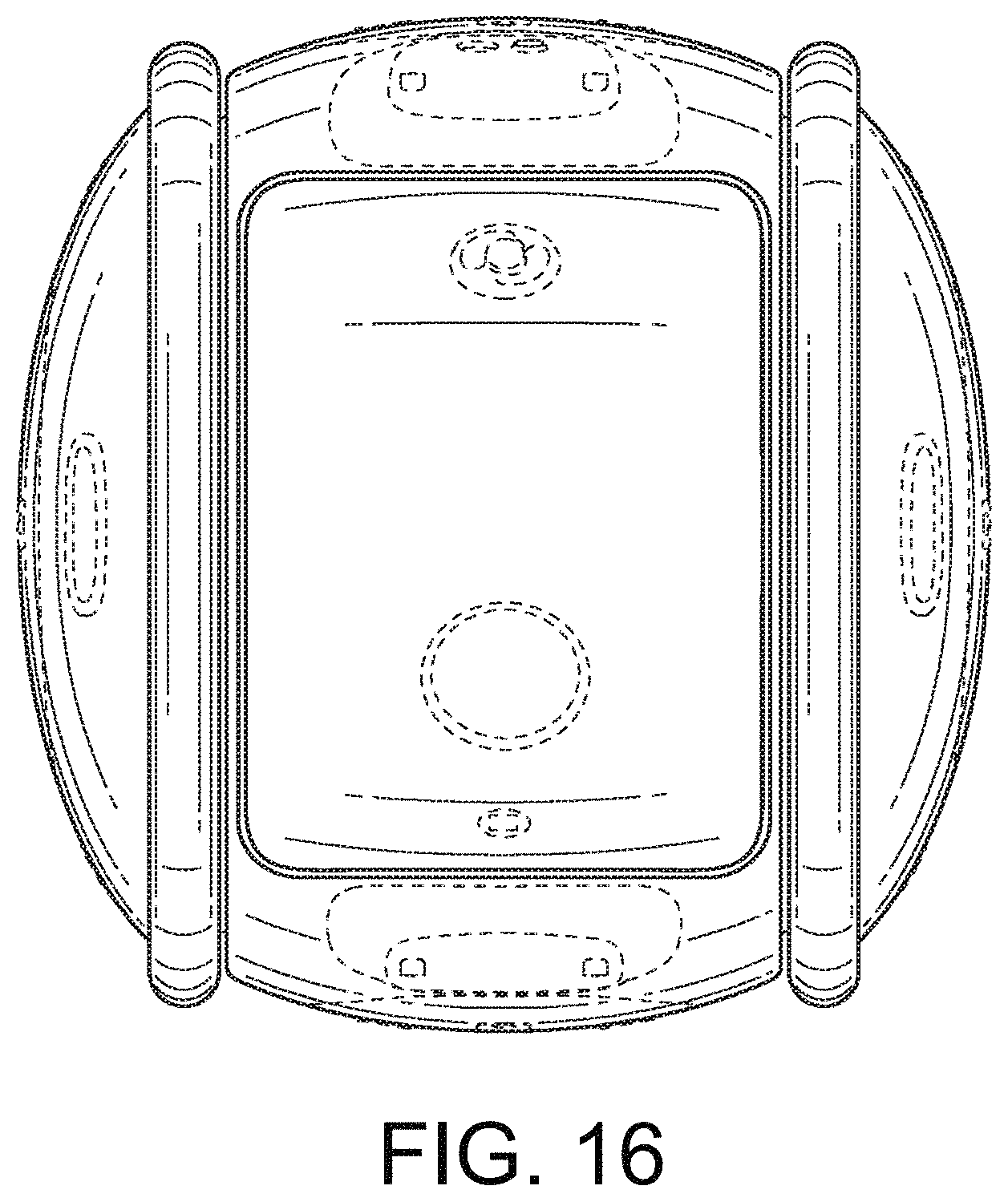
FIG. 15 is a top-front perspective view of a third embodiment of the vehicle;
FIG. 16 is a top view thereof;
FIG. 17 is a bottom view thereof;
FIG. 18 is a front side view thereof;
FIG. 19 is a rear side view thereof;
FIG. 20 is a left side view thereof, the right side view being a mirror image;
FIG. 21 is a top-rear perspective view thereof;
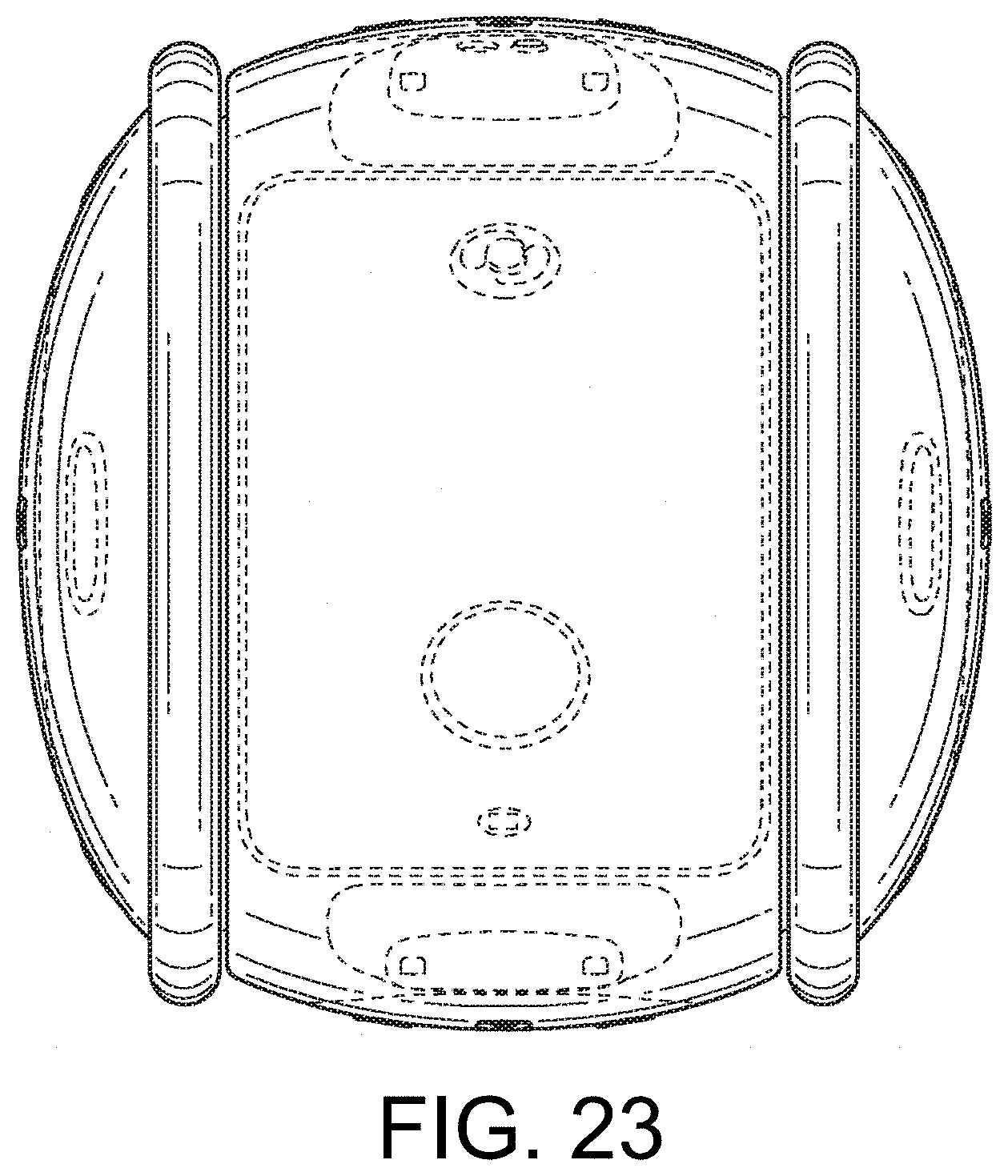
FIG. 22 is a top-front perspective view of a fourth embodiment of the vehicle;
FIG. 23 is a top view thereof;
FIG. 24 is a bottom view thereof;
FIG. 25 is a front side view thereof;
FIG. 26 is a rear side view thereof;
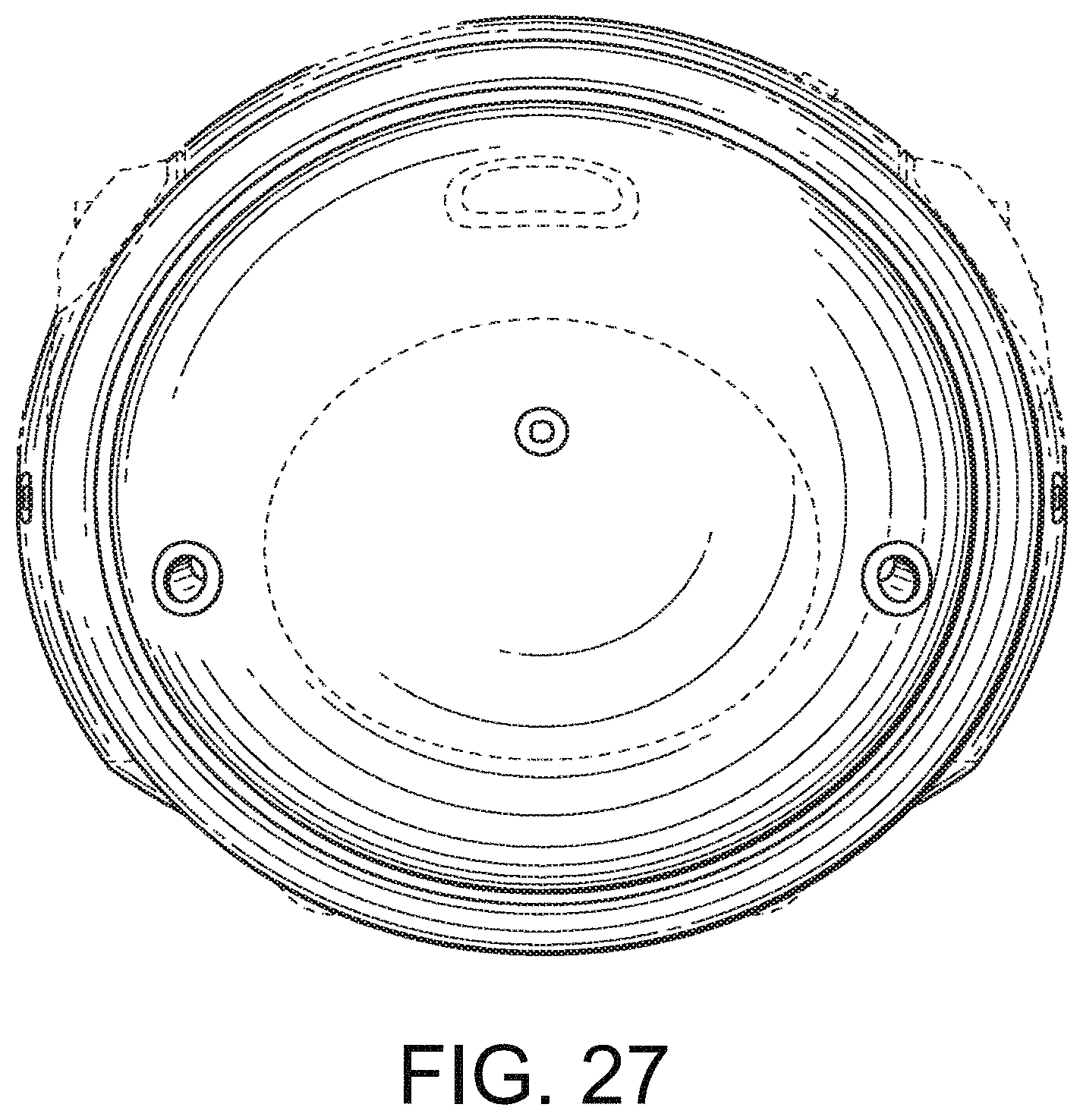
FIG. 27 is a left side view thereof, the right side view being a mirror image;
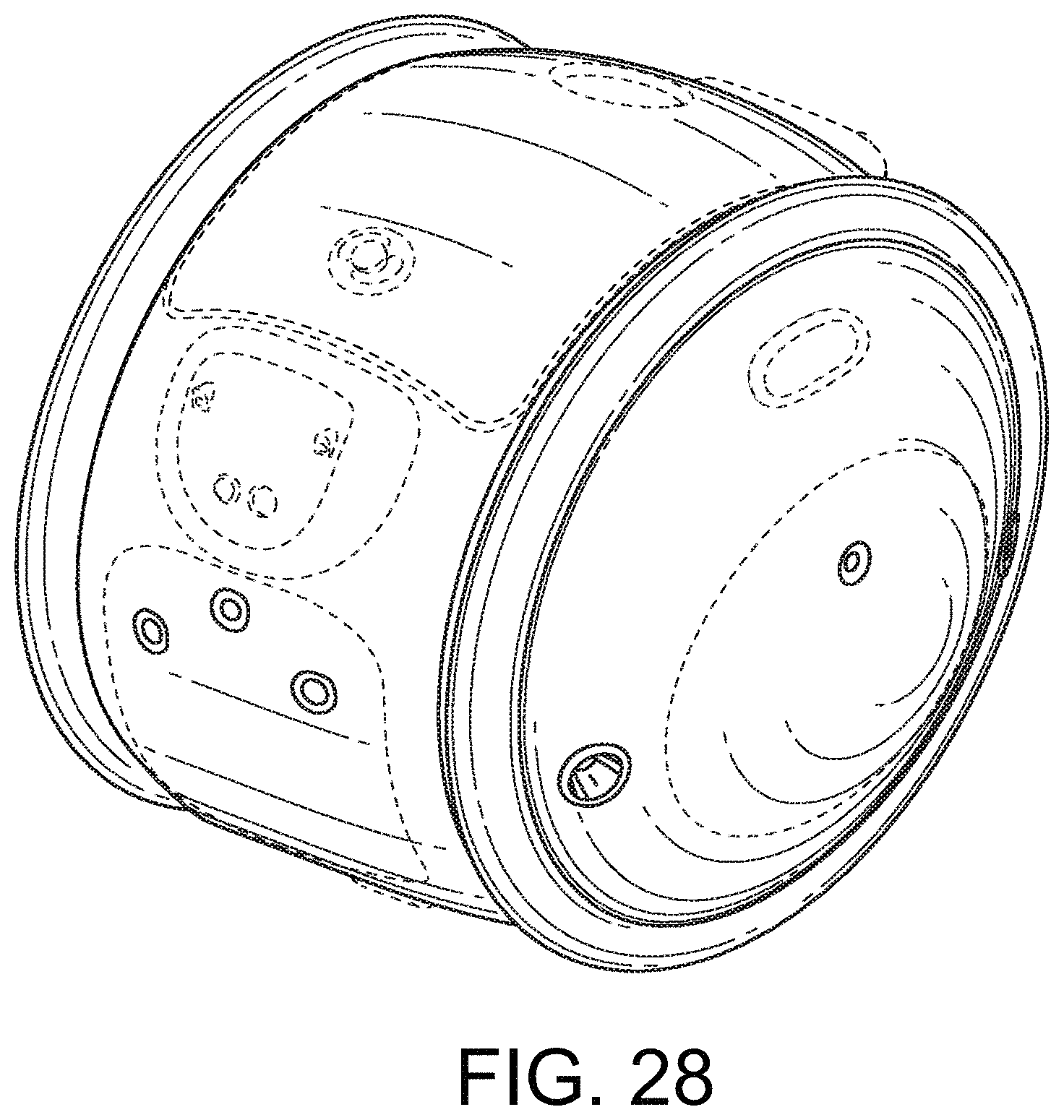
FIG. 28 is a top-rear perspective view thereof;
FIG. 29 is a top-front perspective view of a fifth embodiment of the vehicle;
FIG. 30 is a top view thereof;
FIG. 31 is a bottom view thereof;
FIG. 32 is a front side view thereof;
FIG. 33 is a rear side view thereof;
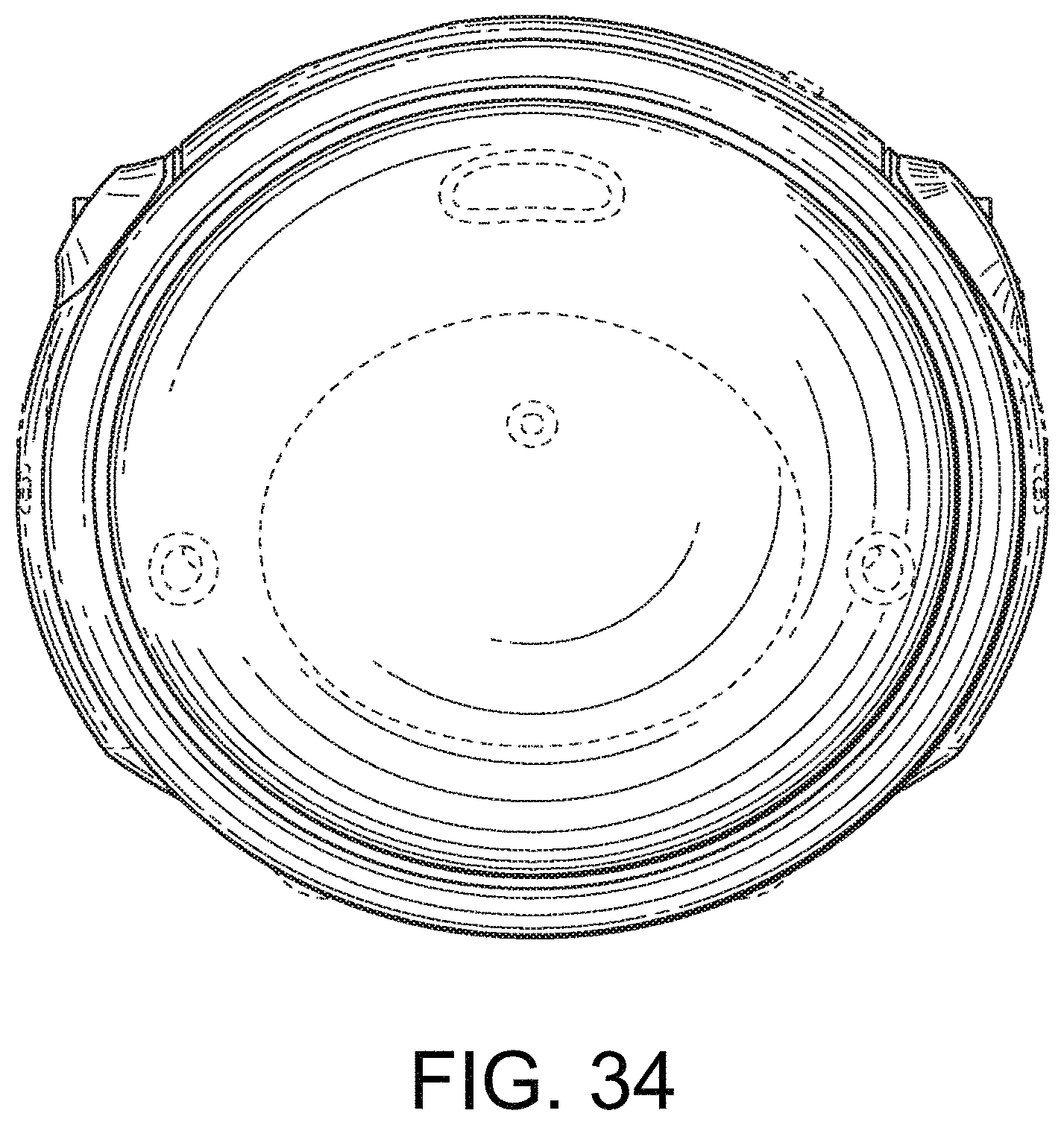
FIG. 34 is a left side view thereof, the right side view being a mirror image;
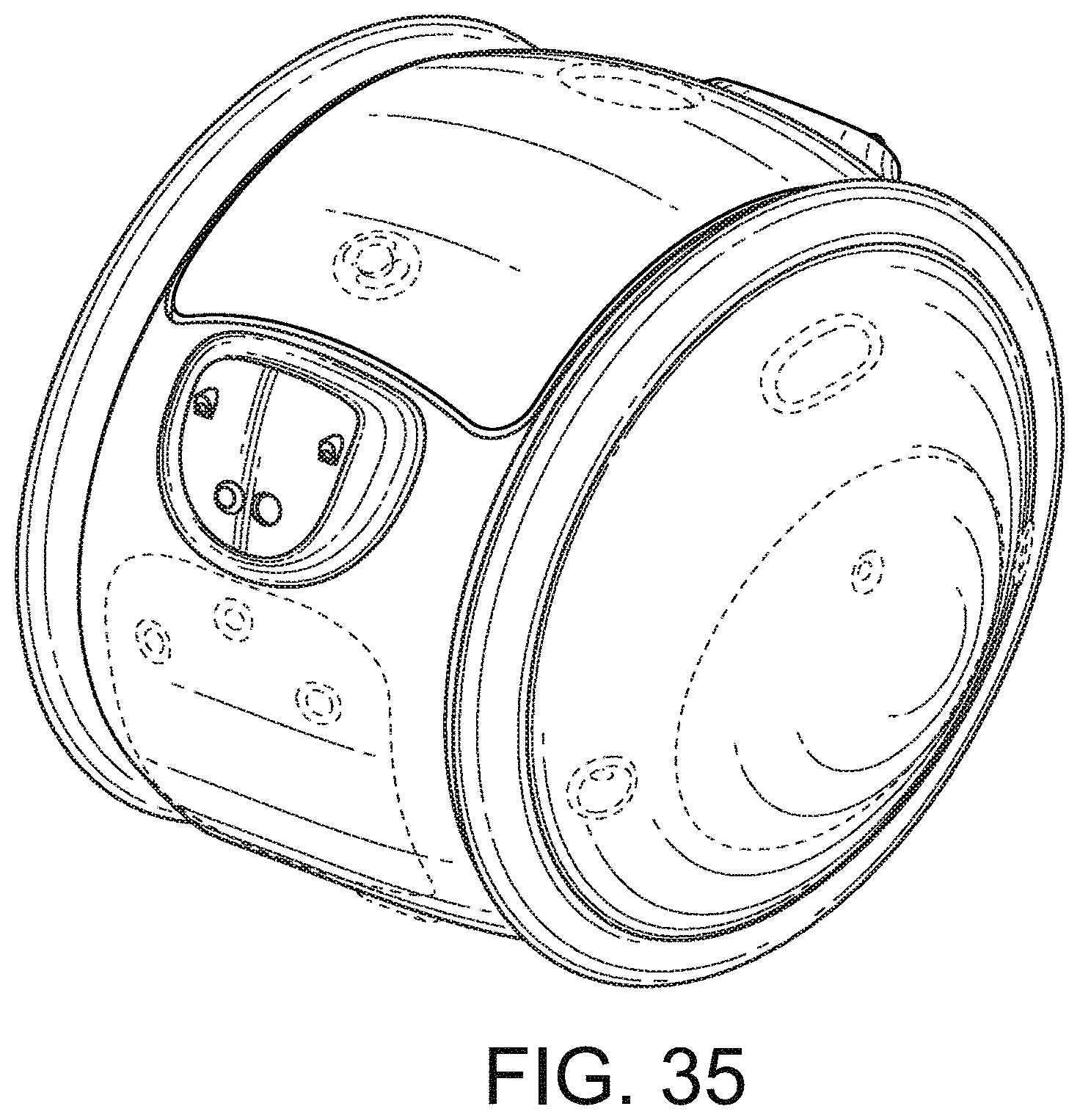
FIG. 35 is a top-rear perspective view thereof;
FIG. 36 is a top-front perspective view of a sixth embodiment of the vehicle;
FIG. 37 is a top view thereof;
FIG. 38 is a bottom view thereof;
FIG. 39 is a front side view thereof;
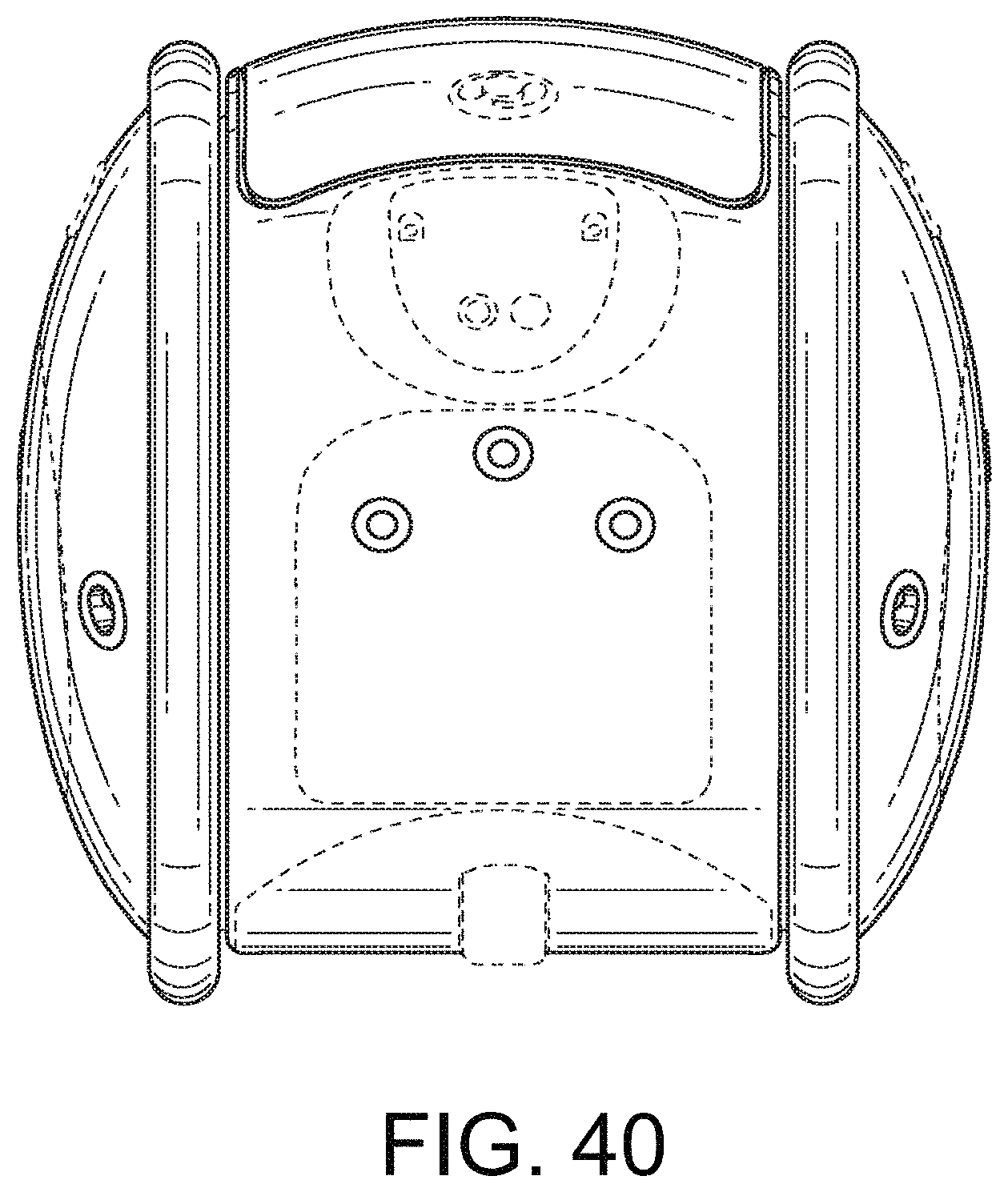
FIG. 40 is a rear side view thereof;
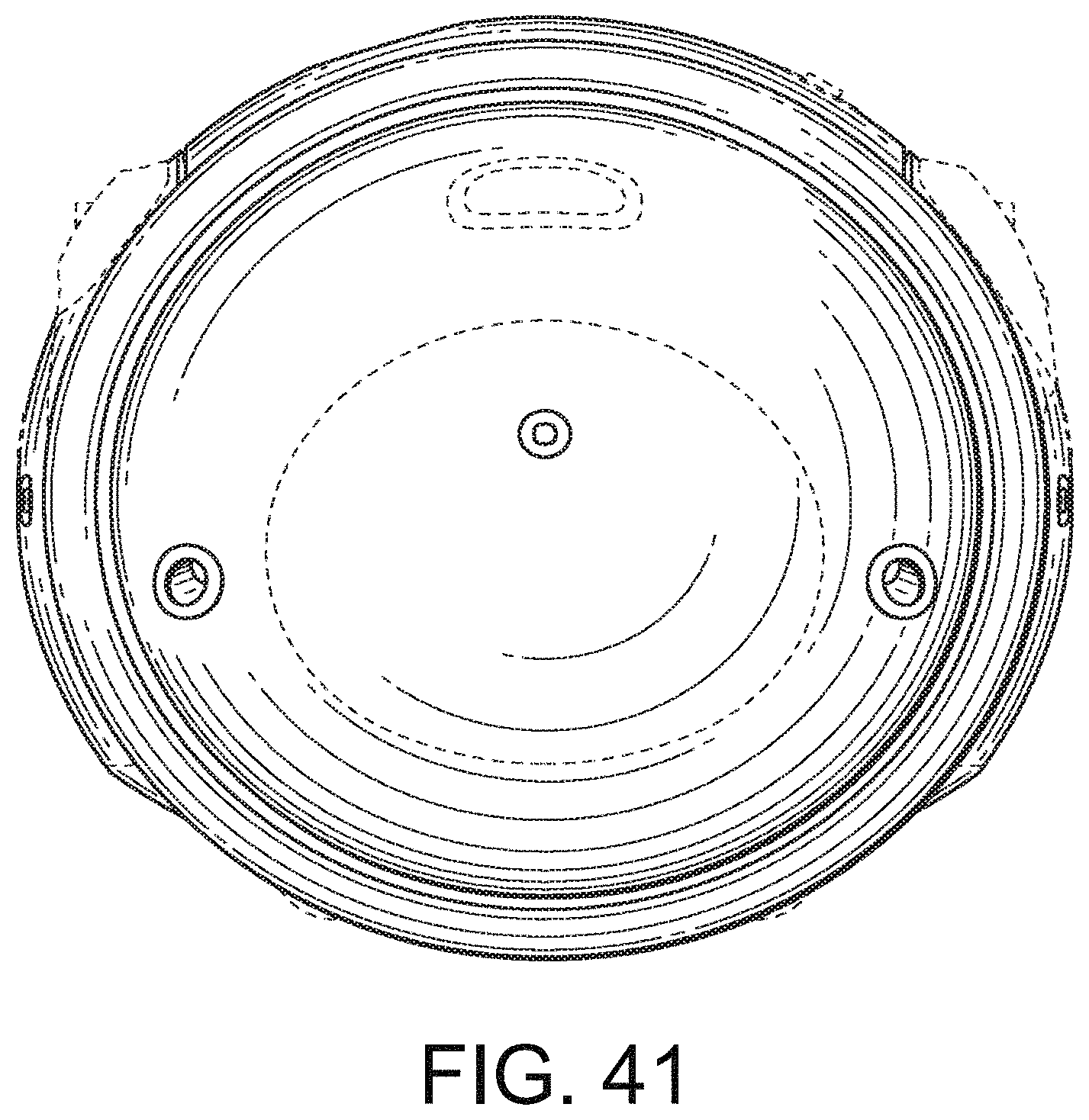
FIG. 41 is a left side view thereof, the right side view being a mirror image; and,
FIG. 42 is a top-rear perspective view thereof.
* * * * *
References
-
youtube.com/watch?v=Ev02Ym2ZVRE
-
-
-
logicites.fr/2016/09/26/a-quoi-ressemblera-dernier-kilometre-10-ans
-
lantenne.com/L-intralogistique-au-service-de-la-performance-a-la-matinale-de-l-Aslog_a33383.html
-
french-iot.tumblr.com/post/151417346436/twinswheel-le-livreur-de-colis-de-demain-la
-
-
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
D00010
D00011
D00012

D00013

D00014

D00015
D00016
D00017

D00018

D00019

D00020

D00021

D00022

D00023
D00024

D00025

D00026

D00027
D00028
D00029

D00030

D00031

D00032

D00033

D00034
D00035
D00036

D00037

D00038

D00039

D00040
D00041
D00042

XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.