Adaptive Roaming And Articulating Generating Unit For Wireless Power Transfer
Hajimiri; Seyed Ali ; et al.
U.S. patent application number 16/853542 was filed with the patent office on 2020-12-10 for adaptive roaming and articulating generating unit for wireless power transfer. The applicant listed for this patent is GuRu, Inc.. Invention is credited to Behrooz Abiri, Florian Bohn, Seyed Ali Hajimiri, Peter Santos.
| Application Number | 20200389057 16/853542 |
| Document ID | / |
| Family ID | 1000005061033 |
| Filed Date | 2020-12-10 |











View All Diagrams
| United States Patent Application | 20200389057 |
| Kind Code | A1 |
| Hajimiri; Seyed Ali ; et al. | December 10, 2020 |
ADAPTIVE ROAMING AND ARTICULATING GENERATING UNIT FOR WIRELESS POWER TRANSFER
Abstract
A wireless power delivery system includes, in part, a roaming and articulating wireless power transfer device. The roaming and articulating wireless power device includes, in part, a wireless power generation unit, an energy storage unit, a controller, and an electrically driven moving platform. The device further includes, in part, at least one RF transmitter or an array of RF transmitters adapted to radiate RF signals at the same frequency. The controller is adapted to control the phase of each RF transmitter independently. The array of RF transmitters may be foldable and expandable. The moving platform may include an inertia measurement, a GPS, bump sensors and proximity sensors. The device may further include a camera, and a wireless communication link via which the device establishes a two-way communication with a recovery unit being wirelessly powered.
| Inventors: | Hajimiri; Seyed Ali; (Pasadena, CA) ; Abiri; Behrooz; (Pasadena, CA) ; Santos; Peter; (Pasadena, CA) ; Bohn; Florian; (Pasadena, CA) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Family ID: | 1000005061033 | ||||||||||
| Appl. No.: | 16/853542 | ||||||||||
| Filed: | April 20, 2020 |
Related U.S. Patent Documents
| Application Number | Filing Date | Patent Number | ||
|---|---|---|---|---|
| 62836320 | Apr 19, 2019 | |||
| 62937917 | Nov 20, 2019 | |||
| 62848506 | May 15, 2019 | |||
| Current U.S. Class: | 1/1 |
| Current CPC Class: | H01Q 15/14 20130101; H02J 50/80 20160201; H02J 50/90 20160201; A61B 5/05 20130101; H02J 7/02 20130101; H02J 50/60 20160201; H02J 50/23 20160201; H02J 50/402 20200101; H02J 50/10 20160201; G01S 19/13 20130101; G01S 17/04 20200101; B66F 3/44 20130101; H02J 50/30 20160201; A61B 5/02444 20130101; G01S 7/03 20130101; G01S 15/04 20130101; G01S 7/415 20130101; A61B 5/08 20130101 |
| International Class: | H02J 50/60 20060101 H02J050/60; H02J 50/40 20060101 H02J050/40; H02J 50/23 20060101 H02J050/23; H02J 50/10 20060101 H02J050/10; H02J 7/02 20060101 H02J007/02; H02J 50/30 20060101 H02J050/30; H02J 50/80 20060101 H02J050/80; H02J 50/90 20060101 H02J050/90; H01Q 15/14 20060101 H01Q015/14; G01S 7/41 20060101 G01S007/41; A61B 5/024 20060101 A61B005/024; A61B 5/08 20060101 A61B005/08; A61B 5/05 20060101 A61B005/05 |
Claims
1. A wireless power delivery system comprises a first roaming and articulating wireless power transfer device, said first roaming and articulating wireless power transfer device comprising: a wireless power generation unit comprising at least one source of electromagnetic power; an energy storage unit; a controller; and an electrically driven moving platform.
2. The system of claim 1 wherein the wireless power generation unit further comprises at least one RF transmitter.
3. The system of claim 1 wherein the wireless power generation unit further comprises an array of RF transmitters adapted to radiate RF signals at the same frequency.
4. The system of claim 3 wherein the controller is adapted to control the phase of each RF transmitter independently.
5. The system of claim 1 wherein the device further comprises one or sensors.
6. The system of claim 1 wherein the moving platform comprises an inertia measurement unit to facilitate navigation.
7. The system of claim 1 wherein the moving platform comprises a GPS to facilitate navigation.
8. The system of claim 1 wherein the moving platform comprises bump sensors to change direction of movement upon hitting an obstacle.
9. The system of claim 1 wherein the moving platform comprises proximity sensors to avoid hitting obstacles.
10. The system of claim 9 wherein the proximity sensors use ultrasound.
11. The system of claim 9 where the proximity sensors comprise IR sensors.
12. The system of claim 1 wherein the device further comprises a camera.
13. The system of claim 12 wherein the device is adapted to locate a power recovery unit by using the camera to identify patterns printed or disposed on the recovery unit.
14. The system of claim 1 wherein the device further comprises a wireless communication link.
15. The system of claim 13 wherein the device establishes a two-way communication with a recovery unit via the communication link.
16. The system of claim 1 wherein the energy storage unit is a battery.
17. The system of claim 16 wherein the battery is rechargeable.
18. The system of claim 17 wherein the battery is charged via a docking station.
19. The system of claim 18 wherein the device further comprises an inductive charging coil.
20. The system of claim 19 wherein the docking station is adapted to charge the device inductively using the inductive charging coil.
21. The system of claim 18 where the device is further adapted to locate the docking station via beacons transmitted by the docking station.
22. The system of claim 1 wherein the energy storage unit is a fuel cell.
23. The system of claim 1 wherein the power generation unit transmits electromagnetic waves in the visible or infrared spectrum to wirelessly transfer power.
24. The system of claim 1 further comprising at least one motor adapted to change an elevation angle of the wireless power generation unit.
25. The system of claim 24 further comprising a scissor lift structure adapted to change the elevation angle in response to the motor.
26. The system of claim 24 further comprising a telescopic boom lift structure adapted to change the elevation angle in response to the motor.
27. The system of claim 1 further comprising at least one motor adapted to change an azimuth angle of the wireless power generation unit.
28. The system of claim 1 further comprising at least one motor adapted to change an elevation height of the wireless power generation unit.
29. The system of claim 28 further comprising a scissor lift structure adapted to change the elevation height in response to the motor.
30. The system of claim 28 further comprising a telescopic boom lift structure adapted to change the elevation height in response to the motor.
31. The system of claim 1 further comprising a lift adapted to lift the system.
32. The system of claim 1 further comprising a lift adapted to lift at least a portion of the wireless power generation unit.
33. The system of claim 1 wherein the moving platform is adapted to navigate to a location from which the wireless power generation unit delivers maximum power to a recovery unit.
34. The system of claim 1 wherein the system is adapted to navigate and select an azimuth angle, elevation height and elevation angle of the wireless power generation unit so as to deliver maximum power to a recovery unit.
35. The system of claim 4 where the system is adapted to navigate and select an azimuth angle and phases of each RF transmitter of the wireless power generation unit so as to deliver maximum power to a recovery unit.
36. The system of claim 1 where the controller includes a memory to store a list of recovery units to be wirelessly powered.
37. The system of claim 36 where the list includes a priority associated with each of the recovery units.
38. The system of claim 37 where the priority for each recovery unit is established in accordance with a charge level of the recovery unit.
39. The system of claim 37 where the priority for each recovery unit is established based on a distance of the recovery unit from the device.
40. The system of claim 3 further comprising a second roaming and articulating wireless power transfer device, said second roaming and articulating wireless power transfer device comprising: a wireless power generation unit comprising at least one source of electromagnetic power; an energy storage unit; a controller; and an electrically driven moving platform, wherein said first and second devices are configured to operate in concert so as to form a combined power generation unit larger than the first or the second power generation units.
41. The system of claim 40 wherein the first and second devices share a reference clock frequency wirelessly received by the first and second devices.
42. The system of claim 3 wherein the array of RF transmitters is foldable and expandable.
43. A wireless power transfer system comprising: a moving platform; and a reflector.
44. The system of claim 43 further comprising at least one motor adapted to change an elevation angle of the reflector.
45. The system of claim 43 further comprising at least one motor adapted to change an azimuth angle of the reflector.
46. The system of claim 43 wherein the reflector is an RF reflector.
47. The system of claim 6 wherein the RF reflector is curved.
48. A wireless power transfer system comprising: a wireless power generation unit comprising a plurality of RF transmitters; and a wireless power recovery unit adapted to be wireless charged, said wireless power recovery unit comprising at least one receive antennas having a variable orientation.
49. The system of claim 48 wherein the wireless power recovery unit comprises at least one RF receiver operating at a substantially same RF frequency as the RF frequency of the plurality of transmitters.
50. The system of claim 49 wherein said RF transmitters and the RF receiver form a radar.
51. The system of claim 50 further comprising: an electrically driven moving platform adapted to move the system to form a synthetic aperture radar.
52. The system of claim 50 wherein the radar senses doppler shifts to detect biological signals.
53. The system of claim 52 wherein the biological signals are defined by breathing.
54. The system of claim 52 wherein the biological signals are defined by heartbeats.
55. The system of claim 52 wherein the system is operated remotely by receiving commands transmitted from a remote control unit.
56. The system of claim 55 wherein the remote control unit is a smartphone.
57. The system of claim 42 wherein the array of RF transmitters includes a plurality of fan-shaped subarrays.
58. The system of claim 42 wherein the array of RF transmitters includes a plurality of subarrays mechanically coupled to one another via a plurality of spring loaded hinges, said system further comprising a motor and a string configured to retract the plurality of subarrays.
59. The system of claim 42 wherein the array of RF transmitters includes a plurality of telescopic subarrays adapted to fold and unfold using gears.
60. The system of claim 42 wherein the array of RF transmitters includes a plurality of subarrays adapted to fold and unfold according to an origami pattern.
61. A wireless power transfer system comprising: a wireless power generation unit comprising a plurality of RF transmitters; a base; at least one arm mechanically coupling the wireless power generation unit to the base; a first actuator enabling the wireless power generation unit to swivel about the at least one arm; and a second actuator enabling the at least one arm to swivel about the base.
62. The wireless power transfer system of claim 61 wherein said base comprises wheels.
63. The wireless power transfer system of claim 62 wherein said wheels are adapted to move on tracks.
Description
CROSS REFERENCE TO RELATED APPLICATIONS
[0001] The present application claims benefit under 35 USC 119(e) of Application Ser. No. 62/836,320, filed Apr. 19, 2019, Application Ser. No. 62/848,506, filed May 15, 2019, and Application Ser. No. 62/937,917, filed Nov. 20, 2019 the contents of all which are incorporated herein by reference in their entirety.
FIELD OF THE INVENTION
[0002] The present invention relates to wireless power delivery, and more particularly, to a mobile power delivery system.
BACKGROUND OF THE INVENTION
[0003] Non-proximity wireless power transmission through the use of radio frequency (RF) and mm-wave beam forming and focusing enables and enhances a plethora of new applications. For example, the proliferation of internet of things (IoT) devices and sensors can be substantially accelerated by delivering power to them wirelessly and eliminating the wiring that would otherwise be required during their installation.
[0004] Another example of wireless power transmission is wireless charging of portable personal devices, such as smart phones and tablets. Charging such devices wirelessly will enhance their usability and reduce the need for carrying portable batteries. In addition, many other electronic devices ranging from wireless mouse and keyboards to thermostats and security sensors and cameras can benefit from wireless power transfer.
[0005] A wireless power generation unit (GU) may include multiple RF sources and antennas, as well as other components, such as a processing unit, interface circuitry, communication circuitry, and the like. An RF energy focal point can be formed at a desired location where a target device is located. The RF energy may be captured using an energy recovery unit disposed in the target device. The recovery unit (RU) may have, among other components, measurement circuitry, processing and communication circuitry, and the like. An RU may utilize various means of power recovery, such as rectennas to collect the RF energy and convert it to DC energy. FIG. 1 shows a GU 20 wirelessly powering an RU 40. GU 20 is shown as including, in part, a processor 10, a controller 12, a wireless communication circuit 14 and an array of transmit antennas 16. RU 40 is shown as including, in part, a processor 30, a power detector 32, a wireless communication circuit 34 and an array of receive antennas 36.
[0006] The GU is ideally adapted to transmit and transfer power in different directions and orientations rapidly and effectively, without much power spill-over (i.e., power not recovered and thus wasted). The GU achieves maximum power transfer by setting a combination of phases of the RF signals that maximize the energy concentration at the RU's location and orientation.
[0007] For a given effective GU aperture area of A.sub.G, an effective RU aperture area of A.sub.R, a distance D between the GU and the RU, and a signal wavelength of .lamda., the transfer efficiency, .eta., defined as the ratio of the power incident on the RU aperture to the power transmitted by the GU may be approximated as:
.eta. = P R U P G U .apprxeq. 1 - e - r where ( 1 ) r = A G A R ( .lamda. D ) 2 ( 2 ) ##EQU00001##
[0008] At relatively large distances, the transfer efficiency may be estimated as r thus yielding:
.eta. = P R U P G U .apprxeq. A G A R ( .lamda. D ) 2 ( 3 ) ##EQU00002##
[0009] Equation (3) assumes that the GU's and RU's apertures are facing each other and are both perpendicular to the axis connecting their centers.
[0010] Target devices to be charged wirelessly using the same GU may be at different locations and orientations with respect to the GU. Therefore, some of the target devices may not receive power optimally due to their locations and orientations. Furthermore, the path between the GU and a target device may by obstructed even under optimum phase combinations and the resulting constructive interference pattern. A need continues to exist for an improved method and system of wireless power delivery.
BRIEF SUMMARY OF THE INVENTION
[0011] A wireless power delivery system, in accordance with one embodiment of the present invention, includes, in part, a roaming and articulating wireless power transfer device that, in turn includes, in part, a wireless power generation unit, an energy storage unit, a controller, and an electrically driven moving platform. The wireless power generation unit includes, in part, least one source of electromagnetic power.
[0012] In one embodiment, the wireless power generation unit further includes, in part, at least one RF transmitter. In one embodiment, the wireless power generation unit further includes, in part, an array of RF transmitters adapted to radiate RF signals at the same frequency. In one embodiment, the controller is adapted to control the phase of each RF transmitter independently.
[0013] In one embodiment, the roaming and articulating wireless power transfer device (device) further includes one or more sensors. In one embodiment, the moving platform incudes, in part, an inertia measurement unit to facilitate navigation. In one embodiment, the moving platform includes, in part, a GPS to facilitate navigation. In one embodiment, the moving platform includes, in part, bump sensors to change direction of the movement upon hitting an obstacle. In one embodiment, the moving platform includes, in part, proximity sensors to avoid hitting obstacles. In one embodiment, the proximity sensors use ultrasound. In one embodiment, the proximity sensors include IR sensors. In one embodiment, the device further includes a camera.
[0014] In one embodiment, the device is adapted to locate a power recovery unit by using the camera to identify patterns printed or disposed on the recovery unit. In one embodiment, the device further includes a wireless communication link. In one embodiment, the device establishes a two-way communication with a recovery unit via the communication link. In one embodiment, the energy storage unit is a battery. In one embodiment, the battery is rechargeable. In one embodiment, the battery is charged via a docking station.
[0015] In one embodiment, the device further includes an inductive charging coil. In one embodiment, the docking station is adapted to charge the device inductively using the inductive charging coil. In one embodiment, the device is further adapted to locate the docking station via beacons transmitted by the docking station. In one embodiment, the energy storage unit is a fuel cell.
[0016] In one embodiment, the power generation unit transmits electromagnetic waves in the visible or infrared spectrum to wirelessly transfer power. In one embodiment, the wireless power delivery system further includes, in part, at least one motor adapted to change an elevation angle of the wireless power generation unit. In one embodiment, the wireless power delivery system further includes, in part, a scissor lift structure adapted to change the elevation angle of the wireless power generation unit in response to the motor. In one embodiment, the wireless power delivery system further includes, in part, a telescopic boom lift structure adapted to change the elevation angle of the wireless power generation unit in response to the motor.
[0017] In one embodiment, the wireless power delivery system further includes, in part, at least one motor adapted to change an azimuth angle of the wireless power generation unit. In one embodiment, the wireless power delivery system further includes, in part, at least one motor adapted to change an elevation height of the wireless power generation unit. In one embodiment, the wireless power delivery system further includes, in part, a scissor lift structure adapted to change the elevation height of the wireless power generation unit in response to the motor. In one embodiment, the wireless power delivery system further includes, in part, a telescopic boom lift structure adapted to change the elevation height of the wireless power generation unit in response to the motor
[0018] In one embodiment, the system further includes, in part, a lift adapted to lift the system. In one embodiment, the system further includes, in part, a lift adapted to lift at least a portion of the wireless power generation unit. In one embodiment, the moving platform is adapted to navigate to a location from which the wireless power generation unit delivers maximum power to a recovery unit. In one embodiment,
[0019] In one embodiment, the system is adapted to navigate and select an azimuth angle, elevation height and elevation angle of the wireless power generation unit such that the system delivers maximum power to a recovery unit. In one embodiment, the system is adapted to navigate and select an azimuth angle and phases of each RF transmitter of the wireless power generation unit such that the system delivers maximum power to a recovery unit.
[0020] In one embodiment, the controller includes a memory to store a list of recovery units to be wirelessly powered by the system. In one embodiment, the list includes a priority associated with each of the recovery units. In one embodiment, the priority for each recovery unit is established in accordance with a charge level of the recovery unit. In another embodiment, the priority for each recovery unit is established based on the distance of the recovery unit from the system.
[0021] In one embodiment, the system further includes, in part, a second roaming and articulating wireless power transfer device. The second roaming and articulating wireless power transfer device includes, in part, a wireless power generation unit that includes at least one source of electromagnetic power, an energy storage unit, a controller, and an electrically driven moving platform. The first and second wireless power generation units are configured to operate in concert so as to form a combined power generation unit larger than the first or the second power generation units. In one embodiment, the first and second devices share a reference clock frequency wirelessly received by the first and second devices. In one embodiment, the array of RF transmitters is foldable and expandable.
[0022] In one embodiment, the array of RF transmitters includes a multitude of fan-shaped subarrays. In one embodiment, the array of RF transmitters includes a multitude of subarrays mechanically coupled to one another via a multitude of spring loaded hinges. The system further include a motor and a string configured to retract the multitude of subarrays. In one embodiment, the array of RF transmitters includes a multitude of telescopic subarrays adapted to fold and unfold using gears. In one embodiment, the array of RF transmitters includes a multitude of subarrays adapted to fold and unfold according to an origami pattern.
[0023] A wireless power transfer system, in accordance with one embodiment of the present invention, includes, in part, a moving platform, and a reflector. In one embodiment, the system further includes, in part, at least one motor adapted to change the elevation angle of the reflector. In one embodiment, the system further includes, in part, at least one motor adapted to change the azimuth angle of the reflector. In one embodiment, the reflector is an RF reflector. In one embodiment, the RF reflector is curved.
[0024] A wireless power transfer system in accordance with one embodiment of the present invention, includes, in part, a wireless power generation unit that, in turn, includes, in part, a multitude of RF transmitters; and a wireless power recovery unit adapted to be wireless charged. The wireless power recovery unit includes, in part, at least one receive antennas having a variable orientation. In one embodiment, the wireless power recovery unit includes, in part, at least one RF receiver operating at substantially the same RF frequency as the RF transmitters.
[0025] In one embodiment, RF transmitters and the RF receiver form a radar. In one embodiment, the system further includes, in part, an electrically driven moving platform adapted to move the system to form a synthetic aperture radar. In one embodiment, the radar senses doppler shifts to detect biological signals. In one embodiment, the biological signals are defined by breathing. In one embodiment, the biological signals are defined by heartbeats. In one embodiment, the system is operated remotely by receiving commands transmitted from a remote control unit. In one embodiment, the remote control unit is a smartphone.
[0026] A wireless power transfer system, in accordance with one embodiment of the present invention, includes, in part, a wireless power generation unit that, in turn, includes a multitude of RF transmitters, a base, at least one arm mechanically coupling the wireless power generation unit to the base, a first actuator enabling the wireless power generation unit to swivel about the at least one arm, and a second actuator enabling the at least one arm to swivel about the base. In one embodiment, the base includes, in part, wheels. In one embodiment, wheels are adapted to move on tracks.
BRIEF DESCRIPTION OF THE DRAWINGS
[0027] FIG. 1 shows a power generating unit wirelessly powering a device, as known in the prior art.
[0028] FIGS. 2A and 2B are simplified perspective front and back views of at roaming and articulating unit adapted to deliver power wirelessly, in accordance with one exemplary embodiment of the present invention.
[0029] FIG. 3 is a bottom perspective view a roaming and articulating unit, in accordance with one exemplary embodiment of the present invention.
[0030] FIG. 4 shows a power generating unit wirelessly powering a device via a roaming and articulating passive unit, in accordance with one exemplary embodiment of the present invention.
[0031] FIG. 5 is a schematic view of a roaming and articulating unit that includes a scissor lift structure, in accordance with one exemplary embodiment of the present invention.
[0032] FIG. 6 is a schematic view of a roaming and articulating unit that includes a scissor lift structure, in accordance with another exemplary embodiment of the present invention.
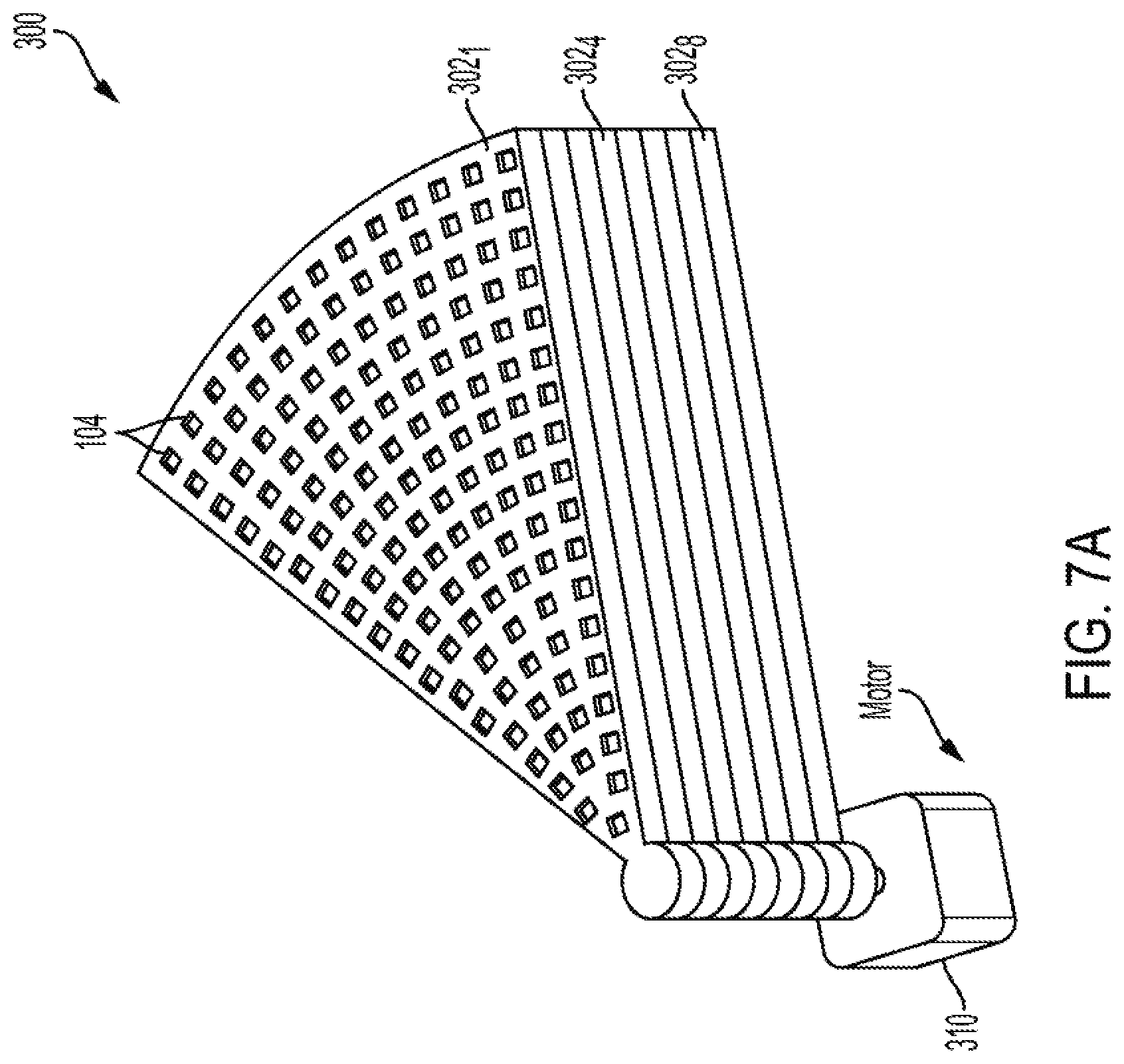
[0033] FIG. 7A shows a retractable antenna array that includes a multitude of fan-shaped subarrays, in accordance with one embodiment of the present invention.
[0034] FIG. 7B shows the retractable antenna array of FIG. 7A in a fully deployed mode, in accordance with one embodiment of the present invention.
[0035] FIG. 7C shows a retractable antenna array that includes a multitude of subarrays, in accordance with one embodiment of the present invention.
[0036] FIG. 7D shows a telescopic retractable antenna array that includes a multitude of subarrays, in accordance with one embodiment of the present invention.
[0037] FIG. 7E shows a retractable antenna array that includes a multitude of subarrays adapted to be folded and unfolded using an origami pattern, in accordance with one embodiment of the present invention.
[0038] FIG. 7F shows the antenna array of FIG. 7E after being partially folded, in accordance with one embodiment of the present invention.
[0039] FIG. 7G shows the antenna array of FIG. 7E after being folded, in accordance with one embodiment of the present invention.
[0040] FIG. 8 shows a roaming and articulating unit with a self-articulating arm adapted to plug the roaming and articulating unit to a receptacle to charge the internal battery of the roaming and articulating unit, in accordance with one embodiment of the present invention.
[0041] FIG. 9 shows a power generating unit having an array of transmit elements and antennas adapted be raised from a top surface of a roaming and articulating unit, in accordance with one embodiment of the present invention.
[0042] FIG. 10 shows a power generating unit having an array of transmit elements and antennas adapted be raised from a top surface of a roaming and articulating unit via a scissor lift structure, in accordance with one embodiment of the present invention.
[0043] FIG. 11 shows a number of positions from which a roaming and articulating unit, in accordance with one embodiment of the present invention, transmits power to a target device.
[0044] FIG. 12A shows various components of a roaming and articulating unit, in accordance with one exemplary embodiment of the present invention.
[0045] FIG. 12B shows various components of a roaming and articulating unit, in accordance with one exemplary embodiment of the present invention.
[0046] FIG. 13 is a flowchart for wireless charging of a target device by a roaming and articulating unit, in accordance with one embodiment of the present invention.
[0047] FIG. 14 shows a number of roaming and articulating units that have moved into close proximity of each other to form a relatively larger transmission aperture, in accordance with one embodiment of the present invention.
[0048] FIG. 15A shows a power generating unit with a transmitter array mounted on a base via an arm, in accordance with one embodiment of the present invention.
[0049] FIG. 15B shows a power generating unit with a transmitter array mounted on a base via a multitude of arms, in accordance with one embodiment of the present invention.
[0050] FIG. 16 shows a power generating unit with a transmitter array mounted on a base having wheels adapted to move on tracks, in accordance with one embodiment of the present invention.
[0051] FIG. 17 shows a power generating unit having a transmitter array and a multitude of sensors mounted on a base via multiple arms, in accordance with one embodiment of the present invention.
[0052] FIG. 18 is a flowchart for wirelessly powering a device, in accordance with one embodiment of the present invention.
[0053] FIG. 19 is a flowchart for wirelessly powering a device, in accordance with one embodiment of the present invention.
DETAILED DESCRIPTION OF THE INVENTION
[0054] In accordance with one aspect of the present invention, a roaming and articulating generation unit (RAGU), actively searches for a target device(s) and moves to an optimum location and orientation to power the target device wirelessly. The RAGU may charge multiple target devices concurrently or during different time periods. The RAGU may prioritize the power delivery based on the charging status, such as the power need of the target devices. After charging one or a group of devices wirelessly during a first time period, the RAGU is adapted to search for a new target device(s), move to another optimum location and orientation--with respect to the new device--and start to transfer power to the new target device wirelessly.
[0055] A RAGU may have an internal energy storage unit that is charged, for example, using a wall outlet, a docking station, or from another wireless power generation unit (GU). The docking station may have electrical connectors and wiring that connects that RAGU to an external source of power (e.g., a wall outlet), or may charge the RAGU inductively. The device powered by a RAGU may be stationary, mobile or another RAGU. In one embodiment, a RAGU may provide power to a target device by transmitting electromagnetic waves (RF, mm-wave, light) or by sending acoustic waves.
[0056] In embodiments where the power is delivered using waves (e.g., acoustic, RF, mm-wave or light), the RAGU includes an array of transmit elements that operate coherently and in concert to generate a focused beam in order to achieve a lensing effect. In such embodiments, the energy is focused on the RU by adjusting the phases of the individual transmit elements of the transmitter array. Furthermore, in such embodiments, the power may be wirelessly transmitted using, for example, a directive source of waves such as a horn antenna, dish antenna, or alternatively using a collimated light source or laser. The following description of the embodiments of the present invention is provided with reference to wireless power delivery systems that generate and focus RF signals. It is understood, however, that embodiments of the present invention equally apply to mm, acoustic, optical waves, and the like.
[0057] FIGS. 2A and 2B are simplified perspective front and back views of a RAGU 100, in accordance with one exemplary embodiment of the present invention. RAGU 100 may be a motor-driven wheel-based mobile wireless power delivery system shown as including, in part, a base 102 and a transmit antenna array 112. Base 102 is adapted to move along the x and y axes on the floor, and rotate along the z axis, as shown. The antenna array includes, in part, an array of transmit antennas 104 adapted to focus radio frequency signals on a target device. RAGU 100 also includes, in part, an articulation unit 114 that may be a crisscrossing scissors unit, as shown in the FIGS. 2A and 2B, adapted to adjust the height, orientation and tilt of the antenna array. RAGU 100 is thus adapted to optimize its location and orientation with respect to a target device through a combination of translational and rotational motion, as well as through the articulation of its antenna array 112. Although not shown, in some embodiments, the antenna array, which is the source of waves for powerless delivery, may be moved using, for example, a gimbal.
[0058] A RAGU, in accordance with some embodiments of the present invention, may include multi-modality sensing units. For example, in some embodiments, a RAGU may include (not shown) infra-red (IR) distance and proximity sensors, ultra-sonic sensors, optical cameras for visual sensing, radar, lidar, GPS, contact sensors, microphones, inertia measurement unit (IMU) sensors, field disturbance sensors, cameras, among other things. Such sensors enable a RAGU not only to navigate through confined spaces in places such as a home, office, store, warehouse, and the like, and provide a map of such spaces, but also to identify animate objects and other sensitive areas, where the nature and the amount of power to be transferred may need to be controlled.
[0059] A RAGU, in accordance with embodiments of the present invention, may be powered by an internal source of energy (e.g., rechargeable battery, fuel cells), or by an external power source to enable its movements, sensing, power delivery and other operations. A RAGU may use a docking station to receive power from a wall outlet. In some embodiments, a RAGU may be powered wirelessly by another RAGU.
[0060] A RAGU may be charged wirelessly by means of proximity inductive charging. FIG. 3 is a bottom perspective view a RAGU 150, in accordance with one embodiment of the present invention. RAGU 150 is shown as including, in part, an inductive coil 152 used for inductive charging when the RAGU moves on to a charging pad not shown in the Figure. In some embodiments, a RAGU may power target devices wirelessly while positioned in a docking station or on a charging pad. When not in a docking station or a charging pad, a RAGU performs various sensing and wireless power delivery operations via its battery and internal power sources.
[0061] In accordance with another aspect of the present invention, a roaming and articulating passive unit (RAPU), facilitates the transfer of wireless power, generated by another GU or RAGU, to one or more target devices. A RAPU may be a reflector, a refractor, or include a multitude of meta-surfaces to redirect a beam of RF energy generated by a RAGU or another stationary RF wireless power generating unit (GU). For example, if the path from a GU or a RAGU to a target device is obstructed by an object, a RAPU is adapted to move into a position that enables the RF beam to be redirected to the target device. FIG. 4 shows a GU 200 attempting to wirelessly power target device 210. GU 200 is a stationary unit assumed to be mounted on, for example, a ceiling. The path of the RF power from GU 200 to device 210 is shown in FIG. 4 as being blocked by object 220. To effectuate the wireless power delivery, RAPU 230 moves into a new position, as shown, so that the RF power generated by GU 200 and reflected by the reflector 235 of the RAPU reaches target device 210 unobstructed.
[0062] As described above, in addition to translational and rotational motion, a RAGU may have an articulation mechanism adapted to lift, reorient and tilt the antenna array. FIG. 5 shows a RAGU 100 that includes a crisscrossing scissors 135 adapted to raise antenna array 112 from base 102 and thereby enhance its reach. Crisscrossing scissors 135 may also change the orientation and tilt of the antenna array. In yet other embodiments, a RAGU 100 may be lifted off the floor 138 in its entirety using crisscrossing scissors 135, as shown in FIG. 6, or using any other lift mechanism.
[0063] In some embodiments, the transmission aperture of a RAGU may be dynamically changed. For example, the aperture may expand out in a fan configuration, an accordion extension, or according to an Origami pattern. The mechanically retractable, foldable and adjustable aperture of a RAGU makes it more compact, thus enabling it to more easily move around and navigate the corners, uneven floors, step heights and hard to reach areas.
[0064] FIG. 7A shows a retractable antenna array 300 that includes 8 exemplary fan-shaped subarrays of 302.sub.1, 302.sub.2 . . . 302.sub.8, in accordance with one embodiment of the present invention. FIG. 7A shows array 300 in retracted mode and FIG. 7B show antenna array 300 in a fully deployed mode. The fan-shaped antenna arrays are retracted and deployed using motor 310 Each subarray is shown as including a multitude of transmit elements 104.
[0065] FIG. 7C shows a retractable antenna array 325 that includes 4 exemplary rectangular-shaped subarrays 302.sub.1, 302.sub.2 . . . 302.sub.4, in accordance with one embodiment of the present invention. Retractable antenna array 325 includes hinges 318 that are spring loaded. Each subarray is shown as including a multitude of transmit elements 104. FIG. 7C shows antenna array 325 in the deployed (unfolded) mode. It is understood that antenna array 325 may be placed in a folded mode using motor 310 and string 315.
[0066] FIG. 7D shows a telescopic retractable antenna array 335 that includes 4 exemplary rectangular-shaped subarrays 302.sub.1, 302.sub.2 . . . 302.sub.4, in accordance with one embodiment of the present invention. Retractable antenna array 335 includes gears 338 and motors 40 that enable the antenna array to retract or deploy. Each subarray is shown as including a multitude of transmit elements 104. FIG. 7D shows antenna array 335 in the deployed mode. It is understood that antenna array 335 may be placed in a folded mode using motors 340 and gears 338.
[0067] FIG. 7E shows a retractable antenna array 345 that includes 6 exemplary rectangular-shaped subarrays 302.sub.1, 302.sub.2 . . . 302.sub.6, in accordance with another embodiment of the present invention. Retractable antenna array 335 is adapted to be folded and unfolded using an origami pattern. FIG. 7F shows antenna array 345 that is partially folded. FIG. 7G shows antenna array 345 of FIG. 7G after further folding.
[0068] A RAGU is adapted to monitor its energy status and locate and identify various power sources, such as a docking station, an inductive charging pad, or a wall outlet for charging its internal energy storage systems. In one embodiment, a RAGU uses its image acquisition system, such as a camera, or other sensors to locate a wall outlet. A self-articulating arm disposed within the RAGU can plug a cord into the outlet to initiate the charging process. To find the wall outlet, the RAGU uses a camera and image recognition algorithms. Once the electrical outlet is located, the RAGU moves toward the outlet. The articulating arm includes a linear stage that adjusts the height of the plug and rotation mechanism that adjusts the angle of the plug to that of outlet. Once the imaging system confirms alignment of the plug and outlet, the RAGU move closer towards the wall until the plug is inserted into the wall outlet. FIG. 8 shows a RAGU 100 with a self-articulating arm 165 adapted to plug the connector 167 disposed at the end of the arm 165 to a receptacle thereby to charge the internal battery of the RAGU.
[0069] In some embodiments, a roaming and articulating unit is adapted to receive a GU as an attachment thereby to form a RAGU. The roaming and articulating unit may be used for a variety of applications other than wireless power delivery. When a user decides to use the roaming and articulating unit to deliver power wirelessly to a target device, the user mounts the GU on top surface of the roaming and articulating unit. FIG. 9 shows a GU 200 (with an antenna array 112) that has been positioned to be mounted on top surface 168 of roaming and articulating unit 160. When so mounted, electrical connectors (not shown) provided on back surface 202 of GU 200 make electrical connections with corresponding connectors (not shown) provided on top surface 168 of the roaming and articulating unit so as to provide electrical power to GU 200. In some embodiments, the mounting components include a mechanism, such as crisscrossing scissors, for lifting and tilting the GU, as shown in FIG. 10.
[0070] To position itself for maximum power delivery, in one exemplary embodiment, the RAGU transmits power to the target device from a first location multiple times with each such transmission occurring after the RAGU rotates a certain amount. After each such rotation and transmission, the RAGU waits to receive, from the target device, information representative of the amount of the power recovered by the target device. Accordingly, the RAGU is aware of the amount of power recovered by the target device for each amount of rotation at the first location. The RAGU then moves to a second location to be closer to the target device along the angular rotation that provides the maximum power delivery to the target device. The RAGU then repeats the process of transmitting power to the target device from the second location multiple times, each time after rotating a certain amount and receiving, from the target device, information representative of the amount of the power recovered by the target device. The RAGU then moves toward the target device along the angular rotation that provides the maximum power delivery to the target device from the second direction. The RAGU continues to repeat the process of transmitting power, rotating in place, receiving information indicative of the level of received power back from the device, and determining the best direction to move toward until it finds a desirable location for power delivery. In one embodiment, the travel distance of the RAGU between each two successive locations is determined by the relative amount of power recovered (or received) by the target device. For example, when the power received by the device is relatively low, the RAGU travels a relatively longer distances. Conversely, when the power received by the device is relatively high, the RAGU travels a relatively shorter distance.
[0071] In accordance with another exemplary embodiment, to find a suitable location for powering a target device, the RAGU transmits power to the target device from an initial location multiple times with each such transmission occurring after the RAGU rotates a certain amount. After each such rotation and transmission, the RAGU waits to receive, from the target device, information representative of the amount of the power recovered by the device. The RAGU then moves to a second location along a direction that is different from that providing the maximum power. While at the second location, the RAGU transmits power to the target device multiple times with each such transmission occurring after the RAGU rotates a certain amount. After each such rotation and transmission from the second location, the RAGU waits to receive, from the target device, information representative of the amount of the power recovered by the device. Armed with the knowledge of the two different angles from two different locations that result in maximum power deliveries, the RAGU approximates the optimum location of the target device using a trilateration algorithm and moves to this optimum location for powering the device. The trilateration algorithm may also be performed when multiple RAGUs that are in communication with one another are used to wirelessly charge a device in a shorter time period.
[0072] The focusing of the electromagnetic waves on a target device by a RAGU may be carried out together with the mechanical movement of the RAGU. In other words, in addition to controlling and varying the phases of the individual transmit elements of the antenna array, the mechanical movements of the RAGU as well as its antenna array may be used to achieve focusing operation. The mechanical movements may occur concurrently with the phase adjustments or after the electromagnetic phase and amplitude adjustments have been performed.
[0073] FIG. 11 shows a first position A from which a RAGU transmits power to a target device N times (N is an integer greater than 1) each time after rotating a given amount about the Z-axis while remaining at point A. Assume that of the N power transmission from point A, the greatest power delivery, as recorded by the target device and relayed back to the RAGU, occurs along direction P.sub.1. The RAGU then moves to a new position B along a direction different from P.sub.1. While remaining at point B, the RAGU transmits power to the target device M times (M is an integer greater than 1 which may or may not be equal to N) each time after rotating a given amount about the Z-axis. Assume that of the M power transmission from point B, the greatest power delivery, as recorded by the target device and relayed back to the RAGU, occurs along direction P.sub.2. Based on this information, the RAGU estimates that the target device is at point T where the lines drawn along directions P.sub.1 and P.sub.2 intersect. The processes described herein and the information obtained in determining the position of a target device and/or the optimum angle for powering the target is representative of the measure radiation pattern of the RAGU and may be used in subsequent calibration and control of the RAGU.
[0074] FIG. 12A shows various components of a RAGU 400, in accordance with one exemplary embodiment of the present invention. RAGU 400 is shown as including, in part, a wireless power transmitter 402, battery 404, wireless transceiver 406, processing and control unit 408, a multitude of sensors 410, and one or more mechanical actuators 412.
[0075] Wireless power transmitter 402 includes a transmit antenna array, such as antenna array 112 shown in FIG. 2A, as well as associated circuitry (not shown) for controlling phases of the individual transmit elements 104, also shown in FIG. 2A. Wireless transceiver 106 is configured to establish a communications link with the target device and includes a wireless transmitter and receiver. For example, the information representative of the amount of the power received by a target device from the RAGU is provided back to the RAGU via wireless transceiver 406. Processing and control unit 408 is configured, among other functions, to control the phases of the transmit elements 104, determine the angle and/or position from which the RAU charges the target device, control the action of the actuators 412, control the linear and rotational movement of the RAGU, process the data received by the sensors, and the like. Sensors 410 may include an inertia measurement unit (IMU) that may, in turn, include an accelerometer, a gyroscope, a magnetometer, and other sensors such as a GPS, a Doppler radar, one or more cameras, LIDAR, ultrasound, bump sensors, odometers, and the like, to determine the position and orientation of the RAGU with respect to, for example, a target device, the walls, furniture, and any other objects positioned within a confined area in which the RAGU is disposed. Actuators 412 are adapted to, among other things, lift the RAGU or its antenna array, tilt the antenna array, fold/unfold the antenna array, plug the RAGU in a wall outlet, and the like, as described above. FIG. 12B shows various components of a RAGU 450, in accordance with another embodiment of the present invention. RAGU 450 is similar to RAGU 400 except that RAGU 4500 includes an inductive charging receiver 414 for inductively charging the RAGU, as was also described above with reference to FIG. 3.
[0076] The Doppler radar, disposed in some embodiments of a RAGU, measures the speed of the RAGU relative to stationary objects. The Doppler radar may also be used by a RAGU to determine the relative angle of the RAGU with respect to walls, furniture, and other objects. The Doppler radar may also be used to keep a certain distance from, for example, a wall, or to run in parallel to the wall. The Doppler radar may also be used to map a room by transmitting RF signals and detecting the reflection off the walls, furniture, and the like, in the room. The Doppler shift of signals caused by the movement of the RAGU may also be used to locate obstacles present in the room.
[0077] When a RAGU that includes a Doppler radar roams, it can create a synthetic aperture. Hence a RAGU may operate as a synthetic aperture radar with a synthetic aperture as large as the room in which it roams, thus to create an accurate holographic image of the room. By using beamforming via its transmit antenna array, signal receiving capabilities via its wireless transceiver (see FIG. 12A), its translational movement, and its Doppler radar, a RAGU may detect locations of humans (and/or other live organisms and pets) in a room by processing the Doppler shift caused by subtle movement of the skin, such as those due to heartbeat, and map their presence. For example, using a Doppler radar, a RAGU can detect if a person has fallen, whether the heart bit rates of the individual occupants of a resident have changed substantially, and the like.
[0078] By creating a holographic image of the room and mapping the positions of its human occupants, a RAGU is further adapted to find an optimum position for a number of other devices, such as speakers, that may be placed in the room. For example, in one embodiment, the RAGU may carry a speaker around a room as music is being played through the speaker, while actively finding an ideal location for the speaker by mapping humans in the room. To achieve this, using its Doppler radar, the RAGU detects the position of the person. Next, the Doppler radar, by detecting the vibrations that the acoustic waves--generated by the speaker--create on the person's skin, provides information representative of the degree of equalization and thus of the optimum position for the speaker. For example, a RAGU's Doppler radar can identify, for a pair of speakers, a pair of optimum locations that cause, for example, the same skin vibrations when the speakers emit acoustic waves.
[0079] In some applications, a speaker may have its own motorized vehicle. The RAGU can find a suitable place for such a speaker by detecting the vibrations that the speaker generates on a person's skin as it moves to different locations. By comparing the degree of detected vibrations to values generated during a calibration phase, the RAGU can thus find the optimum location for the speaker. Therefore, in contrast to conventional audio systems that rely on a microphone to perform equalization and determine the optimum locations of speaker system, a RAGU's Doppler radar, in accordance with embodiments of the present invention, uses the skin vibrations of a person to find the optimum positions of a speaker system so as to achieve sound equalization. The speakers may also be charged by the RAGU.
[0080] In some embodiments, the RAGU uses the information it receives from its Doppler radar as well as information it receives from other sensors, such as cameras, LIDAR, ultrasound, bump sensors, odometers, and the like, to map the locations within which it is charging devices. By comparing the mapping data the RAGU generates from each trip around a confined area to the mapping data from previous trips, the RAGU is adapted to build a highly accurate and advanced model of the walls, chairs, toys, doors, and the like, of the area in which it operates. This, in turn, enables a RAGU to reach known devices efficiently and locate an optimal position for maximum power transfer to each such device.
[0081] FIG. 13 is a flowchart 500 showing how a RAGU charges target devices, in accordance with one embodiment of the present invention. At 502, the target devices (also referred to herein as recovery devices, recovery units, or RUs) send requests for power. At 504, the RAGU generates a priority list of devices to be charged. At 506, the RAGU moves toward the first RU whose charging priority is determined to be the highest. At 508, the RAGU optimizes its location, orientation and tilt so as to focus the beam generated by its transmit antenna array toward the first device. At 510, the RAGU charges the first device and crosses the first device off its charging list. At 512, the RAGU determines whether it has enough charge to power the next device on the priority list. If at 512 the RAGU determines that it has enough charge to power the next device, at 514 the RAGU moves toward the next device and at 508 optimizes its location, orientation and tilt so as to focus the beam generated by its transmit antenna array toward the next device and then repeats the process at 510. If at 512 the RAGU determines that it does not have enough charge to power the second device, the RAGU moves toward the charging station at 516, and charges its battery at 518. Thereafter, the RAGU moves toward the next device at 514 and repeats the process at 508, as described above.
[0082] In some embodiments, a RAGU may identify an RU using a variety of mechanisms, such as a predetermined pattern (black and white, gray scale, and/or color) that can be identified by a camera or an image capture acquisition device disposed in the RAGU. In yet other embodiments, A RAGU may identify an RU using a barcode, or any other tag that has recognizable shapers or patterns and which is formed on the RU. In some embodiments, a RAGU may also have a receive antenna array that it can use together with its transmit antenna array to perform mono-static, bistatic, or multi-static sensing radars for mapping and location identification.
[0083] In accordance with one aspect of the present invention, a RAGU is controlled through a smartphone application. The application, among other things, enables a user, for example, to assign priorities according to which target devices are to be charged, and/or provide instructions to the RAGU about when to operate and when not operate in certain areas of the user's home/office/store. For example, a user may instruct the RAGU not to charge devices in the living room and kitchen before 10 PM, or may instruct the RAGU not to operate in the living room the coming weekend because a friend will be sleeping on the couch. This enable the users to keep track of their devices and the RAGUs when they are away from their homes or are out of town.
[0084] Through the application, a user may also inform the RAGU about the place in which the RAGU is operating, such as home, office, and the like. For example, a user may decide to take his/her RAGU to office during the day and back to home at night. The application enables a user to achieve this so that the RAGU knows of its whereabouts, and thus can use its previously stored mapping data to charge devices.
[0085] A RAGU, in accordance with embodiments of the present invention, is also adapted to keep track of how often it charges each device and communicates this information to the user via the application. For example, if a smoke detector that was previously requesting to be charged by a RAGU every 6 months, changes to making this request every 6 weeks, its battery may need to be replaced. By recording such data and reporting it to the user via the application, the user becomes aware that the smoke detector battery possibly needs to be replaced.
[0086] In one embodiment, a RAGU may be an airborne vehicle, such as a balloon, drone, and the like. In other embodiments, a GU may be mounted on an airborne vehicle and use its internal batteries, or the battery of the airborne device, which may be photovoltaic cells covering the surfaces of the airborne vehicle, to power target devices wirelessly. Such embodiments are adapted to provide power to any flying or stationary device.
[0087] A RAGU, in accordance with embodiments of the present invention, may perform a number of other functions and operate as other devices, such as a mobile speaker to play music, security sensor, wireless router and hub, room mapping, warehouse inventory updating, baby and health monitoring, among others. Furthermore, the antenna array of a GU or a RAGU is a phased array which when coupled with an array of receivers formed by a multitude of target devices (or an array of receivers disposed in a single target device) forms a phased array radar which can be used for navigation, sensing and other applications.
[0088] In yet other embodiments, a GU may be mounted on a surface of a submarine vehicle and use the energy harvested mechanically from water waves to power other devices and submarines that are out of reach.
[0089] A RAGU and/or a RAPU is adapted to work collaboratively with other RAGUs and/or RAPUs. For example, a multitude of RAGUs may operate synchronously and in concert to provide a transmission aperture that is larger than that of the individual RAGUs. To achieve this, for example, two or more RAGUs navigate and position themselves in close proximity of each other, thereby to form a larger transmission aperture. FIG. 14 shows three RAGUs 1001, 1002 and 1003 that have moved into close proximity of each other to form a relatively larger transmission aperture. In other words, the transmission aperture of the combined antenna arrays 112.sub.1, 112.sub.2 and 112.sub.3 is greater than the transmission aperture of each of individual antenna arrays 112.sub.1, 112.sub.2 and 112.sub.3. Synchronization between RAGUs 1001, 1002 and 1003 may be achieved in several different ways. For example, in one embodiment, a reference clock signal that is transmitted wirelessly via an optical or RF transmitter by a GU, one of the RAGUs/RAPUs, or another wired or wireless device, may be used to synchronize the local clocks of the RAGUs so that they operate in concert to collectively form a single effective aperture in order to enhance the wireless power transfer efficiency and power level. In other words, collaboration between RAGUs, in accordance with embodiments of the present invention, provides enhanced range, power, and efficiency.
[0090] In one embodiment, when multiple RAGUs and RAPUs are deployed, one of the RAGUs or RAPUs may serve as a master with the remaining RAGUs and RAPUs operating as servants. In such embodiments, the master will provide instructions and control, either fully or partially, to the servants. In yet other embodiments, multiple RAGUs and RAPUs operate in a decentralized and self-organized fashion to operate as a swarm intelligence system.
[0091] In accordance with one aspect of the present invention, a recovery device/unit may be a roaming and articulating recover unit (RARU). A RARU can thus reposition and reorient itself to maximize power receipt and recovery. A RARU, for example, may be incorporated on wall mounted remotely powered devices and adjust the angle of its receive antenna array based on the height that the device is mounted on the wall or the minimum distance that a RAGU can approach the RARU.
[0092] In one embodiment the GU antenna array can be mounted on moving arms similar to ones supporting a desk lamp. FIG. 15A shows a GU 600 that includes a transmitter array 112 mounted on base 610 via arm 602. GU 600 is adapted to change its height, tilt and orientation using actuator 615 and 625 to wirelessly power RU 605, in accordance with one embodiment of the present invention. FIG. 15B shows a GU 650 adapted to change its height, tilt and orientation using actuators 615, 625, 635 and 645, in accordance with another embodiment of the present invention. In some other embodiments, not shown, the number of actuators and the number of moving arms may be fewer or more than four depending on the desired degree of freedom.
[0093] In some embodiments, as described above, the GU may move using, for example, wheels. The GU may move around freely using tracks. FIG. 16 shows GU 700 having a base 610 that includes wheels adapted to move on tracks 604, 606. GU 700 is shown as including actuators 615, 625 and 645. FIG. 17 shows a GU 750 that includes a transmit array 112, actuators 615, 625, 645 and base 610. GU 750 is also shown as including a multitude of sensors collectively identified as 752.
[0094] The recovery unit (e.g., RU 605 shown in FIGS. 15A and 15B) transfer information such as the amount of received power, distribution of RF power over its antennas, orientation (through use of the RU's IMU sensors), requested power level, and the like, to the GU. The GU, based on the received information from RU and information from its own sensors 752 that include, for example IMUs, proximity sensors, Radar (ultrasonic, RF or LIDAR), and the like, determines the optimum direction of movement of the GU, orientation, tilt, height of the transmit array 112 and causes the actuators to achieve such optimum direction, orientation, tilt, and height. The estimated location(s) of a GU with respect to the RU(s) may be used to determine the optimum orientation of the GU to attain optimal power transfer to one or more RUs.
[0095] FIG. 18 is a flowchart 800 for wirelessly powering an RU, in accordance with one embodiment of the present invention. After RU indicates its readiness to be charged at 802, the RU sends a request for power at 804. At 806, the GU focuses its RF beam on the RU. At 808 the RU reports its orientation, position, together with the power and the focal spot size of the power it receives from the GU, to the GU. If at 810 the RF beam is determined as satisfying predefined focusing conditions, no adjustment to the GU is required, and the GU continues to charge the RU until the charging is completed at 812.
[0096] If at 810 the RF beam is determined as not satisfying predefined focusing conditions, the actuators are engaged at 814. This causes the GU transmitter to adjust its various positioning parameters, such as height, orientation, tilt, and the like. At 816 the GU beam is refocused. If at 818, the beam focus is determined as being improved, as reported by the RU, the process moves to 810. If at 818, the beam focus is determined as not being improved, the actuation direction is reverted at 820, subsequent to which the actuation is engaged at 814 and the process is repeated.
[0097] FIG. 19 is a flowchart 850 for wirelessly powering an RU, in accordance with another embodiment of the present invention. After RU indicates its readiness to be charged at 802, the RU sends a request for power at 804. At 852, the RU sends information representative of its position and orientation to the GU. If at 854, the GU determines that the RU is within the GU charging zone, at 856 the GU determines an optimum position and orientation of its array of transmitters. Then at 858 the GU actuators are engaged thereby causing the GU to focus its RF beam on the RU at 860. The GU power remains focused on the RU until the RU is charged after which the process ends at 870. If at 854 the GU determines that the RU is not within the GU charging zone, at 862 the GU sends a signal to RU that wireless charging is not possible following which the process ends at 870.
[0098] It is understood that any robotic control algorithms including, but not limited to, PID controllers, gradient descent, artificial intelligence, genetic algorithm or simulated annealing can be used to guide the actuator movements based on input from RU and sensors to position the GU for optimum power transfer to the RU and navigate around objects. The calculation of the mechanical orientation and electronic phase settings can be based on a least-mean squares (LMS) maximization or highest priority power allocation approaches.
[0099] In some embodiments, using a subset of the sensors (e.g. Radar, LIDAR, ultrasonic, field disturbance sensors, etc.), a RAGU can detect the movement of other objects around it to vary its position and transmit RF power accordingly. For example, when the movement of a hand approaching the RU is detected, the RAGU processor will shut down RF power transfer before the users hand reaches the RF beam thus causing the actuators to move the transmitters away from RU and enabling the user to safely pick up the phone. A RAGU may use voice activated commands to start/stop charging, move toward specific RU to be charged, move out of the way, and the like.
[0100] When multiple RUs are to be charged, a RAGU may use any number of techniques to power the RUs. In one exemplary embodiment, the RAGU positions the transmitters in a location that charges with maximum efficiency and power transfer level, the RU having the highest priority, while concurrently powering other RUs at a lower rate. The priority of an RU may change dynamically during the process of charging as, for example, the charging states of the RUs change. A change in an RU priority, causes the RAGU to move, if necessary, to efficiently power another RU having acquired the highest priority.
[0101] In another exemplary embodiment, the RAGU positions its transmitter array in a location in which the efficiency of wireless power transfer is at least proportional to the priority of RUs to be charged. For example, an RU with a low priority may receive higher than a predefined efficiency level due to its proximity to another RU with a high priority.
[0102] In some embodiments, the RAGU may include lamps that operate as a desk lamp. The lamps may also be used as state indicators. For example, the light sources may change color, blink or dim to indicate, for example, that the transmitters are charging a device, the transmitter is in idle mode, or the like. The lighting source may also be used as an indicator of the coverage area of wireless power transfer system, where an RU placed in the illuminated area will be charged.
[0103] The above embodiments of the present invention are illustrative and not limitative. Embodiments of the present invention are not limited by the type of device that may be wirelessly charged. Other additions, subtractions or modifications are obvious in view of the present disclosure and are intended to fall within the scope of the appended claims.
* * * * *
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
D00010
D00011
D00012

D00013

D00014

D00015



XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.