Movable Carrier Auxiliary System And Parking Auxiliary Method Thereof
CHANG; Yeong-Ming ; et al.
U.S. patent application number 16/824214 was filed with the patent office on 2020-12-10 for movable carrier auxiliary system and parking auxiliary method thereof. This patent application is currently assigned to ABILITY OPTO-ELECTRONICS TECHNOLOGY CO., LTD.. The applicant listed for this patent is ABILITY OPTO-ELECTRONICS TECHNOLOGY CO., LTD.. Invention is credited to Yeong-Ming CHANG, Chien-Hsun LAI, Yao-Wei LIU.
| Application Number | 20200384982 16/824214 |
| Document ID | / |
| Family ID | 1000004766486 |
| Filed Date | 2020-12-10 |








View All Diagrams
| United States Patent Application | 20200384982 |
| Kind Code | A1 |
| CHANG; Yeong-Ming ; et al. | December 10, 2020 |
MOVABLE CARRIER AUXILIARY SYSTEM AND PARKING AUXILIARY METHOD THEREOF
Abstract
A movable carrier auxiliary system includes an environmental detecting device, a control device, a state detecting device, and a parking auxiliary device. The environmental detecting device includes an image capturing module and an operation module. A parking auxiliary method thereof includes capture an environmental image around a movable carrier with the image capturing module; analyze whether the environmental image has a parking space with the operation module; detect a movement state of the movable carrier with the state detecting device; generate a prompting message with the parking auxiliary device based on an analysis result of the operation module and the movement state of the movable carrier, thereby the driver could manipulate the control device based on the prompting message to move the movable carrier to the parking space, improving a convenience and a safety when parking the movable carrier.
| Inventors: | CHANG; Yeong-Ming; (Taichung City, TW) ; LAI; Chien-Hsun; (Taichung City, TW) ; LIU; Yao-Wei; (Taichung City, TW) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Assignee: | ABILITY OPTO-ELECTRONICS TECHNOLOGY
CO., LTD. Taichung City TW |
||||||||||
| Family ID: | 1000004766486 | ||||||||||
| Appl. No.: | 16/824214 | ||||||||||
| Filed: | March 19, 2020 |
| Current U.S. Class: | 1/1 |
| Current CPC Class: | B60W 2710/207 20130101; B60W 2552/53 20200201; B60W 50/14 20130101; B60W 2554/20 20200201; B60W 2050/146 20130101; B60W 30/06 20130101; G06K 9/00812 20130101; B60W 2710/18 20130101; B60W 2420/42 20130101; B62D 15/0285 20130101 |
| International Class: | B60W 30/06 20060101 B60W030/06; G06K 9/00 20060101 G06K009/00; B60W 50/14 20060101 B60W050/14; B62D 15/02 20060101 B62D015/02 |
Foreign Application Data
| Date | Code | Application Number |
|---|---|---|
| Jun 6, 2019 | TW | 108119743 |
Claims
1. A movable carrier auxiliary system, comprising: an environmental detecting device comprising at least one image capturing module and an operation module, wherein the at least one image capturing module is disposed in a movable carrier and is adapted to capture an environmental image around the movable carrier; the operation module is electrically connected to the at least one image capturing module and determines whether the environmental image has a parking space or not, wherein a capacity of the parking space is greater than a volume of the movable carrier, and a length, a width, and a height of the parking space is greater than a length, a width, and a height of the movable carrier; a control device which is disposed in the movable carrier and is adapted to be manipulated by a driver to move the movable carrier; a state detecting device which is disposed in the movable carrier and is adapted to detect a movement state of the movable carrier; and a parking auxiliary device which is disposed in the movable carrier and is electrically connected to the operation module of the environmental detecting device and the state detecting device, wherein when the environmental image has the parking space, the parking auxiliary device generates a prompting message based on a distance between the movable carrier and the parking space, a relative position of the movable carrier and the parking space, and the movement state of the movable carrier, thereby the driver manipulates the control device based on the prompting message to move the movable carrier to the parking space.
2. The movable carrier auxiliary system of claim 1, wherein the at least one image capturing module comprises a a lens group; the lens group comprises at least two lenses having refractive power and satisfies: 1.0.ltoreq.f/HEP.ltoreq.10.0; 0 deg<HAF.ltoreq.150 deg; and 0.9.ltoreq.2(ARE/HEP).ltoreq.2.0; wherein f is a focal length of the lens group; HEP is an entrance pupil diameter of the lens group; HAF is a half of a maximum field angle of the lens group; for any surface of any lens, ARE is a profile curve length measured from a start point where an optical axis of the lens group passes through any surface of one of the at least two lenses, along a surface profile of the corresponding lens, and finally to a coordinate point, from which a vertical distance to the optical axis is half of the entrance pupil diameter.
3. The movable carrier auxiliary system of claim 1, wherein the state detecting device at least comprises a speed sensor for detecting a speed of the movable carrier; the movement state at least comprises the speed of the movable carrier; the parking auxiliary device generates the prompting message when the speed of the movable carrier measured by the speed sensor is less than or equal to a starting speed.
4. The movable carrier auxiliary system of claim 3, wherein the state detecting device further comprises at least one of a steering angle sensor and an inertial sensor; the steering angle sensor is adapted to detect a steering angle of the movable carrier; the inertial sensor is adapted to detect an acceleration, an inclination angle, or a yaw rate of the movable carrier; the parking auxiliary device generates the prompting message based on the distance between the movable carrier and the parking space, the relative position of the movable carrier and the parking space, and the speed, the steering angle, the acceleration, the inclination angle, or the yaw rate of the movable carrier.
5. The movable carrier auxiliary system of claim 3, wherein the parking auxiliary device does not generate the prompting message when the speed of the movable carrier measured by the speed sensor is greater than the starting speed.
6. The movable carrier auxiliary system of claim 1, wherein the parking auxiliary device comprises a warning module for generating a warning message when the driver manipulates the control device based on the prompting message and when therein is an obstruction located between the movable carrier and the parking space in the environmental image.
7. The movable carrier auxiliary system of claim 6, wherein the warning module at least comprises one of a voice playback member, a light generating member, and an image displaying member, thereby to present the warning message in forms of sounds, lights, or displaying an image or a text, or both of the image and the text.
8. The movable carrier auxiliary system of claim 1, wherein the control device comprises a steering wheel, a gear shift module, a driving pedal, and a braking pedal; the parking auxiliary device generates the prompting message which corresponds to a steering direction and a steering margin, and corresponds to a gear position of the gear shift module, and corresponds to whether the driving pedal is pedaled or not, and corresponds to whether the braking pedal is pedaled or not, thereby the driver controls the steering wheel, the gear shift module, the driving pedal, and the braking pedal based on the prompting message to move the movable carrier to the parking space.
9. The movable carrier auxiliary system of claim 1, wherein the control device comprises a steering wheel, a gear shift module, a driving pedal, and a braking pedal; the parking auxiliary device automatically controls the steering wheel to rotate and generates the prompting message which corresponds to a gear position of the gear shift module, and corresponds to whether the driving pedal is pedaled or not, and corresponds to whether the braking pedal is pedaled or not, thereby the driver controls the gear shift module, the driving pedal, and the braking pedal based on the prompting message to move the movable carrier to the parking space.
10. The movable carrier auxiliary system of claim 1, wherein the control device comprises a steering wheel, a gear shift module, a driving pedal, and a braking pedal; the parking auxiliary device automatically controls the steering wheel to rotate, and automatically controls operations of the driving pedal and the braking pedal, and generates the prompting message which corresponds to a gear position of the gear shift module, thereby the driver controls the gear shift module based on the prompting message to move the movable carrier to the parking space.
11. The movable carrier auxiliary system of claim 1, wherein the environmental detecting device further comprises a detection wave transceiver module electrically connected to the operation module; the detection wave transceiver module is adapted to send a detection wave in at least a direction which is not a traveling direction of the movable carrier, and receive a reflection detection wave of the detection wave; the operation module determines whether the environmental image has the parking space or not via the reflection detection wave and the environmental image.
12. The movable carrier auxiliary system of claim 1, wherein the environmental detecting device further comprises a detection wave transceiver module electrically connected to the operation module; the detection wave transceiver module is adapted to send a detection wave in a traveling direction of the movable carrier, and receive a reflection detection wave of the detection wave; the operation module determines the distance between the movable carrier and the parking space and the relative position of the movable carrier and the parking space via the reflection detection wave and the environmental image.
13. The movable carrier auxiliary system of claim 11, wherein the detection wave is selected from an ultrasonic wave, a millimeter wave radar, a lidar, an infrared light, a laser, or a combination of the foregoing.
14. The movable carrier auxiliary system of claim 12, wherein the detection wave is selected from an ultrasonic wave, a millimeter wave radar, a lidar, an infrared light, a laser, or a combination of the foregoing.
15. The movable carrier auxiliary system of claim 1, wherein the at least one image capturing module of the environmental detecting device comprises two image capturing modules; the operation module determines whether a three-dimensional environmental image formed by the environmental images captured by the two image capturing modules has the parking space or not and determines the distance between the movable carrier and the parking space and the relative position of the movable carrier and the parking space.
16. The movable carrier auxiliary system of claim 1, wherein the at least one image capturing module of the environmental detecting device comprises four image capturing modules for capturing environmental images on a frontward, a rearward, a leftward, and a rightward of the movable carrier.
17. The movable carrier auxiliary system of claim 1, wherein the parking auxiliary device comprises a displaying module electrically connected to the environmental detecting device; the prompting message is displayed on the displaying module as an image, a text, or both of the image and the text.
18. The movable carrier auxiliary system of claim 17, wherein the displaying module is a vehicle electronic rear-view mirror.
19. The movable carrier auxiliary system of claim 18, wherein the displaying module comprises: a first transparent assembly having a first incidence surface and a first exit surface, wherein an image enters the first transparent assembly via the first incidence surface, and is emitted via the first exit surface; a second transparent assembly disposed on the first exit surface, wherein a gap is formed between the second transparent assembly and the first transparent assembly; the second transparent assembly comprises a second incidence surface and a second exit surface; the image is emitted to the second transparent assembly from the first exit surface and is emitted via the second exit surface; an electro-optic medium layer disposed in the gap and formed between the first exit surface of the first transparent assembly and the second incidence surface of the second transparent assembly; at least one transparent electrode disposed between the first transparent assembly and the electro-optic medium layer; at least one reflective layer, wherein the electro-optic medium layer is disposed between the first transparent assembly and the at least one reflective layer; at least one transparent conductive layer disposed between the electro-optic medium layer and the at least one reflective layer; at least one electrical connector electrically connected to the electro-optic medium layer, wherein the at least one electrical connector transmits an electrical energy to the electro-optic medium layer to change a transparency of the electro-optic medium layer; and at least one control member electrically connected to the at least one electrical connector, wherein when a luminance of the image exceeds a certain luminance, the at least one control member controls the at least one electrical connector to supply the electrical energy to the electro-optic medium layer.
20. The movable carrier auxiliary system of claim 1, wherein the parking auxiliary device at least comprises a voice playback member for presenting the warning message by playing a corresponding voice of the warning message.
21. The movable carrier auxiliary system of claim 16, wherein the environmental detecting device further comprises a luminance sensor electrically connected to the image capturing modules for detecting a luminance on at least directions in which the image capturing modules capture the environmental image; when the luminance measured by the luminance sensor is greater than an upper threshold, the image capturing modules is controlled to capture the environmental image in a way that reduce an amount of light entering; when the luminance measured by the luminance sensor is less than a lower threshold, the image capturing modules is controlled to capture the environmental image in a way that increase the amount of light entering.
22. The movable carrier auxiliary system of claim 2, wherein the lens group satisfies: 0.9.ltoreq.ARS/EHD.ltoreq.2.0; wherein for any surface of any lens, ARS is a profile curve length measured from a start point where the optical axis passes therethrough, along a surface profile thereof, and finally to an end point of a maximum effective radius thereof; and EHD is a maximum effective radius thereof.
23. The movable carrier auxiliary system of claim 2, wherein the lens group satisfies: PLTA.ltoreq.100 .mu.m; PSTA.ltoreq.100 .mu.m; NLTA.ltoreq.100 .mu.m; NSTA.ltoreq.100 .mu.m; SLTA.ltoreq.100 .mu.m; SSTA.ltoreq.100 .mu.m; and |TDT|.ltoreq.250%; wherein HOI is a maximum imaging height for image formation perpendicular to the optical axis on an image plane of the at least one image capturing module; PLTA is a transverse aberration at 0.7 HOI in a positive direction of a tangential ray fan aberration of the at least one image capturing module after the longest operation wavelength passing through an edge of the entrance pupil; PSTA is a transverse aberration at 0.7 HOI in the positive direction of the tangential ray fan aberration of the at least one image capturing module after the shortest operation wavelength passing through the edge of the entrance pupil; NLTA is a transverse aberration at 0.7 HOI in a negative direction of the tangential ray fan aberration of the at least one image capturing module after the longest operation wavelength passing through the edge of the entrance pupil; NSTA is a transverse aberration at 0.7 HOI in the negative direction of the tangential ray fan aberration of the at least one image capturing module after the shortest operation wavelength passing through the edge of the entrance pupil; SLTA is a transverse aberration at 0.7 HOI of a sagittal ray fan aberration of the at least one image capturing module after the longest operation wavelength passing through the edge of the entrance pupil; SSTA is a transverse aberration at 0.7 HOI of the sagittal ray fan aberration of the at least one image capturing module after the shortest operation wavelength passing through the edge of the entrance pupil; TDT is a TV distortion of the at least one image capturing module upon image formation.
24. The movable carrier auxiliary system of claim 2, wherein the lens group comprises four lenses having refractive power, which are constituted by a first lens, a second lens, a third lens, and a fourth lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the at least one image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the fourth lens.
25. The movable carrier auxiliary system of claim 2, wherein the lens group comprises five lenses having refractive power, which are constituted by a first lens, a second lens, a third lens, a fourth lens, and a fifth lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the at least one image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the fifth lens.
26. The movable carrier auxiliary system of claim 2, wherein the lens group comprises six lenses having refractive power, which are constituted by a first lens, a second lens, a third lens, a fourth lens, a fifth lens, and a sixth lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the at least one image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the sixth lens.
27. The movable carrier auxiliary system of claim 2, wherein the lens group comprises seven lenses having refractive power, which are constituted by a first lens, a second lens, a third lens, a fourth lens, a fifth lens, a sixth lens, and a seventh lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the at least one image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the seventh lens.
28. The movable carrier auxiliary system of claim 2, wherein the lens group further comprises an aperture, and the aperture satisfies: 0.2.ltoreq.InS/HOS.ltoreq.1.1; wherein HOS is a distance in parallel with the optical axis between a lens surface of the lens group furthest from an image plane of the at least one image capturing module and the image plane; InS is a distance on the optical axis between the aperture and the image plane of the at least one image capturing module.
29. A parking auxiliary method of the movable carrier auxiliary system claimed in claim 1, comprising steps of: A. capturing the environmental image around the movable carrier with the at least one image capturing module; B. receiving the environmental image with the operation module, and analyzing whether the environmental image has a space with the capacity greater than the volume of the movable carrier, and a length, a width, and a height of the space is greater than the length, the width, and the height of the movable carrier with the operation module; if there is the space with the capacity greater than the volume of the movable carrier in the environmental image, and the length, the width, and the height of the space is greater than the length, the width, and the height of the movable carrier, the operation module determines the space is the parking space; C. determining the distance between the parking space and the movable carrier and the relative position of the movable carrier and the parking space with the operation module based on the environmental image; D. detecting the movement state of the movable carrier with the state detecting device; and E. generating the prompting message with the parking auxiliary device based on the distance between the movable carrier and the parking space, the relative position of the movable carrier and the parking space which are obtained in step C and the movement state of the movable carrier obtained in step D, so that the driver manipulate the control device based on the prompting message to move the movable carrier to the parking space.
30. The method of claim 29, wherein in step B, the operation module first determines whether the environmental image has a parking grid marking; if there is the parking grid marking in the environmental image, the operation module determines whether an area within the parking grid marking has the parking space or not.
31. The method of claim 30, wherein in step B, the operation module first analyzes whether the environmental image has a line image forming a plurality of corners, and selects and determines the line image with two corners as the parking grid marking, and then determines whether an area between the two corners has the parking space or not.
32. The method of claim 31, wherein in step B, the operation module further determines whether there is a line marking between the two adjacent corners or not; if there is the line marking between the two adjacent corners, the operation module determines whether an area surrounded by the two adjacent corners and the line marking has the parking space or not.
33. The method of claim 29, wherein in step B, the operation module first determines whether the environmental image has two shunned carriers; if the environmental image has the two shunned carriers, the operation module determines whether an area between the two shunned carriers has the parking space or not.
34. The method of claim 33, wherein in step B, if there is the parking space in the environmental image, the operation module determines whether one of the shunned carriers moves or not; the warning message is generated when one of the shunned carriers is determined moves.
35. The method of claim 29, wherein in step D, the movement state detected by the state detecting device comprises a speed of the movable carrier; in step D, the parking auxiliary device generates the prompting message when the speed of the movable carrier is less than or equal to a starting speed.
36. The method of claim 29, wherein after step E, the parking auxiliary device generates a warning message when the driver manipulates the control device based on the prompting message and when there is an obstruction located between the movable carrier and the parking space in the environmental image.
Description
BACKGROUND OF THE INVENTION
Technical Field
[0001] The present invention relates to a movable carrier auxiliary system, and more particularly to an auxiliary system capable of assisting vehicle parking by identifying environmental images.
Description of Related Art
[0002] With frequent commercial activities and the rapid expansion of transportation logistics, people are more dependent on the mobile vehicle such as car or motorcycle. At the same time, drivers are paying more and more attention to the protection of their lives and property when driving, and therefore, in addition to the performance and the comfort of the mobile vehicle, it is also considered whether the mobile vehicle to be purchased provides sufficient safety guards or auxiliary devices. Under this trend, in order to increase the safety of vehicles, automobile manufacturers or vehicle equipment design manufacturers have developed various driving safety protection devices or auxiliary devices, such as rearview mirrors, driving recorders, a panoramic image instant displaying of blind vision areas, a global positioning system that records the driving path at any time, and etc.
[0003] In addition, with the rapid development of digital cameras and computer visions in daily life, the digital cameras have been applied to driving assistance systems, hoping to reduce the accident rate of traffic accidents through the application of artificial intelligence.
[0004] Typically, during a parking process, the driver observes a condition outside the vehicle via rear-view mirrors on sides of the vehicle or inside of the vehicle, thereby to determine a relative position of the vehicle and a parking space so as to park the vehicle. However, the condition outside the vehicle observed in the rearview mirrors still has many blind spots that cannot be seen. In addition, the front pillar, the center pillar, the rear pillar and other structures of the vehicle will also block the driver's line of sight, resulting in blind spots. For the problem of blind spots, the driver can only park the vehicle by controlling the vehicle based on experience, so that there are some drivers having difficulty in parking the vehicle due to lack of experience, inattention, or external environmental factors (such as weather and brightness), which makes it difficult for the driver to park the vehicle in the parking space, and may even clash other vehicles.
BRIEF SUMMARY OF THE INVENTION
[0005] In view of the above, the purpose of the present invention is to provide a movable carrier auxiliary system and a parking auxiliary method thereof, which could improve a convenience and a safety when parking a movable carrier.
[0006] The aspect of embodiment of the present disclosure directs to a movable carrier auxiliary system, which includes an environmental detecting device, a control device, a state detecting device, and a parking auxiliary device, wherein the environmental detecting device includes at least one image capturing module and an operation module. The at least one image capturing module is disposed in the movable carrier for capturing an environmental image around the movable carrier. The operation module is electrically connected to the at least one image capturing module and determines whether there is a parking space in the environmental image or not, wherein the parking space has a capacity greater than a volume of the movable carrier, and a length, a width, and a height of the parking space is greater than a length, a width, and a height of the movable carrier. The control device is disposed in the movable carrier for being manipulated by a driver to move the movable carrier. The state detecting device is disposed in the movable carrier for detecting a movement state of the movable carrier. The parking auxiliary device is disposed in the movable carrier and is electrically connected to the operation module of the environmental detecting device and the state detecting device, so that when the environmental image has the parking space, the parking auxiliary device generates a prompting message based on a distance between the movable carrier and the parking space, a relative position of the movable carrier and the parking space, and the movement state of the movable carrier, thereby the driver could manipulate the control device based on the prompting message to move the movable carrier to the parking space.
[0007] The image capturing module includes a lens group; the lens group includes at least two lenses having refractive power and satisfies: 1.0.ltoreq.f/HEP.ltoreq.10.0; 0 deg<HAF.ltoreq.150 deg; and 0.9.ltoreq.2(ARE/HEP).ltoreq.2.0, wherein f is a focal length of the lens group; HEP is an entrance pupil diameter of the lens group; HAF is half a maximum visual angle of the lens group; ARE is a profile curve length measured from a start point where an optical axis of the at least one lens group passes through any surface of one of the at least two lenses, along a surface profile of the corresponding lens, and finally to a coordinate point of a perpendicular distance where is a half of the entrance pupil diameter away from the optical axis.
[0008] The lens group uses structural size design and combination of refractive powers, convex and concave surfaces of at least two optical lenses (the convex or concave surface in the disclosure denotes the geometrical shape of an image-side surface or an object-side surface of each lens on an optical axis) to reduce the size and increase the quantity of incoming light of the optical image capturing system, thereby the optical image capturing system could have a better amount of light entering therein and could improve imaging total pixels and imaging quality for image formation.
[0009] In an embodiment, the lens group satisfies: 0.9.ltoreq.ARS/EHD.ltoreq.2.0, wherein for any surface of any lens, ARS is a profile curve length measured from a start point where the optical axis passes therethrough, along a surface profile thereof, and finally to an end point of a maximum effective radius thereof; EHD is a maximum effective radius thereof.
[0010] In an embodiment, the lens group further satisfies: PLTA.ltoreq.100 .mu.m; PSTA.ltoreq.100 .mu.m; NLTA.ltoreq.100 .mu.m; NSTA.ltoreq.100 .mu.m; SLTA.ltoreq.100 .mu.m; SSTA.ltoreq.100 .mu.m; and |TDT|.ltoreq.250%, wherein HOI is a maximum imaging height for image formation perpendicular to the optical axis on an image plane of the image capturing module; PLTA is a transverse aberration at 0.7 HOI in a positive direction of a tangential ray fan aberration of the image capturing module after the longest operation wavelength passing through an edge of the entrance pupil; PSTA is a transverse aberration at 0.7 HOI in the positive direction of the tangential ray fan aberration of the image capturing module after the shortest operation wavelength passing through the edge of the entrance pupil; NLTA is a transverse aberration at 0.7 HOI in a negative direction of the tangential ray fan aberration of the image capturing module after the longest operation wavelength passing through the edge of the entrance pupil; NSTA is a transverse aberration at 0.7 HOI in the negative direction of the tangential ray fan aberration of the image capturing module after the shortest operation wavelength passing through the edge of the entrance pupil; SLTA is a transverse aberration at 0.7 HOI of a sagittal ray fan aberration of the image capturing module after the longest operation wavelength passing through the edge of the entrance pupil; SSTA is a transverse aberration at 0.7 HOI of the sagittal ray fan aberration of the image capturing module after the shortest operation wavelength passing through the edge of the entrance pupil; and TDT is a TV distortion of the image capturing module upon image formation.
[0011] In an embodiment, the lens group includes four lenses having refractive power, which is constituted by a first lens, a second lens, a third lens, and a fourth lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the fourth lens.
[0012] In an embodiment, the lens group includes five lenses having refractive power, which is constituted by a first lens, a second lens, a third lens, a fourth lens, and a fifth lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the fifth lens.
[0013] In an embodiment, the lens group includes six lenses having refractive power, which is constituted by a first lens, a second lens, a third lens, a fourth lens, a fifth lens, and a sixth lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the sixth lens.
[0014] In an embodiment, the lens group includes seven lenses having refractive power, which is constituted by a first lens, a second lens, a third lens, a fourth lens, a fifth lens, a sixth lens, and a seventh lens in order along the optical axis from an object side to an image side; and the lens group satisfies: 0.1.ltoreq.InTL/HOS.ltoreq.0.95; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the image capturing module; InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the seventh lens.
[0015] In an embodiment, the lens group further includes an aperture, and the aperture satisfies: 0.2.ltoreq.InS/HOS.ltoreq.1.1; wherein HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and an image plane of the at least one lens group; InS is a distance on the optical axis between the aperture and an image plane of the image capturing module.
[0016] The lens parameter related to a length or a height in the lens:
[0017] A maximum height for image formation of the optical image capturing system is denoted by HOI. A height of the optical image capturing system (i.e., a distance between an object-side surface of the first lens and an image plane on an optical axis) is denoted by HOS. A distance from the object-side surface of the first lens to the image-side surface of the seventh lens is denoted by InTL. A distance from the first lens to the second lens is denoted by IN12 (for instance). A central thickness of the first lens of the optical image capturing system on the optical axis is denoted by TP1 (for instance).
[0018] The lens parameter related to a material in the lens:
[0019] An Abbe number of the first lens in the optical image capturing system is denoted by NA1 (for instance). A refractive index of the first lens is denoted by Nd1 (for instance).
[0020] The lens parameter related to a view angle of the lens:
[0021] A view angle is denoted by AF. Half of the view angle is denoted by HAF. A major light angle is denoted by MRA.
[0022] The lens parameter related to exit/entrance pupil in the lens:
[0023] An entrance pupil diameter of the optical image capturing system is denoted by HEP. For any surface of any lens, a maximum effective radius (EHD) is a perpendicular distance between an optical axis and a crossing point on the surface where the incident light with a maximum viewing angle of the optical image capturing system passing the very edge of the entrance pupil. For example, the maximum effective radius of the object-side surface of the first lens is denoted by EHD11, the maximum effective radius of the image-side surface of the first lens is denoted by EHD12, the maximum effective radius of the object-side surface of the second lens is denoted by EHD21, the maximum effective radius of the image-side surface of the second lens is denoted by EHD22, and so on.
[0024] The lens parameter related to an arc length of the shape of a surface and a surface profile:
[0025] For any surface of any lens, a profile curve length of the maximum effective radius is, by definition, measured from a start point where the optical axis of the belonging optical image capturing system passes through the surface of the lens, along a surface profile of the lens, and finally to an end point of the maximum effective radius thereof. In other words, the curve length between the aforementioned start and end points is the profile curve length of the maximum effective radius, which is denoted by ARS. For example, the profile curve length of the maximum effective radius of the object-side surface of the first lens is denoted by ARS11, the profile curve length of the maximum effective radius of the image-side surface of the first lens is denoted by ARS12, the profile curve length of the maximum effective radius of the object-side surface of the second lens is denoted by ARS21, the profile curve length of the maximum effective radius of the image-side surface of the second lens is denoted by ARS22, and so on.
[0026] For any surface of any lens, a profile curve length of half the entrance pupil diameter (HEP) is, by definition, measured from a start point where the optical axis of the belonging optical image capturing system passes through the surface of the lens, along a surface profile of the lens, and finally to a coordinate point of a perpendicular distance where is half the entrance pupil diameter away from the optical axis. In other words, the curve length between the aforementioned stat point and the coordinate point is the profile curve length of half the entrance pupil diameter (HEP), and is denoted by ARE. For example, the profile curve length of half the entrance pupil diameter (HEP) of the object-side surface of the first lens is denoted by ARE11, the profile curve length of half the entrance pupil diameter (HEP) of the image-side surface of the first lens is denoted by ARE12, the profile curve length of half the entrance pupil diameter (HEP) of the object-side surface of the second lens is denoted by ARE21, the profile curve length of half the entrance pupil diameter (HEP) of the image-side surface of the second lens is denoted by ARE22, and so on.
[0027] The lens parameter related to a depth of the lens shape:
[0028] A displacement from a point on the object-side surface of the sixth lens, which is passed through by the optical axis, to a point on the optical axis, where a projection of the maximum effective semi diameter of the object-side surface of the sixth lens ends, is denoted by InRS61 (the depth of the maximum effective semi diameter). A displacement from a point on the image-side surface of the sixth lens, which is passed through by the optical axis, to a point on the optical axis, where a projection of the maximum effective semi diameter of the image-side surface of the seventh lens ends, is denoted by InRS62 (the depth of the maximum effective semi diameter). The depth of the maximum effective semi diameter (sinkage) on the object-side surface or the image-side surface of any other lens is denoted in the same manner.
[0029] The lens parameter related to the lens shape:
[0030] A critical point C is a tangent point on a surface of a specific lens, and the tangent point is tangent to a plane perpendicular to the optical axis and the tangent point cannot be a crossover point on the optical axis. Following the above description, a distance perpendicular to the optical axis between a critical point CM on the object-side surface of the fifth lens and the optical axis is HVT51 (for instance), and a distance perpendicular to the optical axis between a critical point C52 on the image-side surface of the fifth lens and the optical axis is HVT52 (for instance). A distance perpendicular to the optical axis between a critical point C61 on the object-side surface of the sixth lens and the optical axis is HVT61 (for instance), and a distance perpendicular to the optical axis between a critical point C62 on the image-side surface of the sixth lens and the optical axis is HVT62 (for instance). A distance perpendicular to the optical axis between a critical point on the object-side or image-side surface of other lenses is denoted in the same manner.
[0031] The object-side surface of the seventh lens has one inflection point IF711 which is nearest to the optical axis, and the sinkage value of the inflection point IF711 is denoted by SGI711 (for instance). A distance perpendicular to the optical axis between the inflection point IF711 and the optical axis is HIF711 (for instance). The image-side surface of the seventh lens has one inflection point IF721 which is nearest to the optical axis, and the sinkage value of the inflection point IF721 is denoted by SGI721 (for instance). A distance perpendicular to the optical axis between the inflection point IF721 and the optical axis is HIF721 (for instance).
[0032] The object-side surface of the seventh lens has one inflection point IF712 which is the second nearest to the optical axis, and the sinkage value of the inflection point IF712 is denoted by SGI712 (for instance). A distance perpendicular to the optical axis between the inflection point IF712 and the optical axis is HIF712 (for instance). The image-side surface of the seventh lens has one inflection point IF722 which is the second nearest to the optical axis, and the sinkage value of the inflection point IF722 is denoted by SGI722 (for instance). A distance perpendicular to the optical axis between the inflection point IF722 and the optical axis is HIF722 (for instance).
[0033] The object-side surface of the seventh lens has one inflection point IF713 which is the third nearest to the optical axis, and the sinkage value of the inflection point IF713 is denoted by SGI713 (for instance). A distance perpendicular to the optical axis between the inflection point IF713 and the optical axis is HIF713 (for instance). The image-side surface of the seventh lens has one inflection point IF723 which is the third nearest to the optical axis, and the sinkage value of the inflection point IF723 is denoted by SGI723 (for instance). A distance perpendicular to the optical axis between the inflection point IF723 and the optical axis is HIF723 (for instance).
[0034] The object-side surface of the seventh lens has one inflection point IF714 which is the fourth nearest to the optical axis, and the sinkage value of the inflection point IF714 is denoted by SGI714 (for instance). A distance perpendicular to the optical axis between the inflection point IF714 and the optical axis is HIF714 (for instance). The image-side surface of the seventh lens has one inflection point IF724 which is the fourth nearest to the optical axis, and the sinkage value of the inflection point IF724 is denoted by SGI724 (for instance). A distance perpendicular to the optical axis between the inflection point IF724 and the optical axis is HIF724 (for instance).
[0035] An inflection point, a distance perpendicular to the optical axis between the inflection point and the optical axis, and a sinkage value thereof on the object-side surface or image-side surface of other lenses is denoted in the same manner.
[0036] The lens parameter related to an aberration:
[0037] Optical distortion for image formation in the optical image capturing system is denoted by ODT. TV distortion for image formation in the optical image capturing system is denoted by TDT. Further, the range of the aberration offset for the view of image formation may be limited to 50%-100% field. An offset of the spherical aberration is denoted by DFS. An offset of the coma aberration is denoted by DFC.
[0038] The length of the contour curve of any surface of a single lens in the range of the maximum effective radius affects the surface correction aberration and the optical path difference between the fields of view. The longer the profile curve length, the better the ability to correct the aberration, but at the same time It will increase the difficulty in manufacturing, so it is necessary to control the length of the profile curve of any surface of a single lens within the maximum effective radius, in particular to control the profile length (ARS) and the surface within the maximum effective radius of the surface. The proportional relationship (ARS/TP) between the thicknesses (TP) of the lens on the optical axis. For example, the length of the contour curve of the maximum effective radius of the side surface of the first lens object is represented by ARS11, and the thickness of the first lens on the optical axis is TP1, and the ratio between the two is ARS11/TP1, and the maximum effective radius of the side of the first lens image side. The length of the contour curve is represented by ARS12, and the ratio between it and TP1 is ARS12/TP1. The length of the contour curve of the maximum effective radius of the side of the second lens object is represented by ARS21, the thickness of the second lens on the optical axis is TP2, the ratio between the two is ARS21/TP2, and the contour of the maximum effective radius of the side of the second lens image The length of the curve is represented by ARS22, and the ratio between it and TP2 is ARS22/TP2. The proportional relationship between the length of the profile of the maximum effective radius of any surface of the remaining lenses in the optical imaging system and the thickness (TP) of the lens on the optical axis to which the surface belongs, and so on.
[0039] The optical image capturing system has a maximum image height HOI on the image plane vertical to the optical axis. A transverse aberration at 0.7 HOI in the positive direction of the tangential ray fan aberration after the longest operation wavelength passing through the edge of the entrance pupil is denoted by PLTA; a transverse aberration at 0.7 HOI in the positive direction of the tangential ray fan aberration after the shortest operation wavelength passing through the edge of the entrance pupil is denoted by PSTA; a transverse aberration at 0.7 HOI in the negative direction of the tangential ray fan aberration after the longest operation wavelength passing through the edge of the entrance pupil is denoted by NLTA; a transverse aberration at 0.7 HOI in the negative direction of the tangential ray fan aberration after the shortest operation wavelength passing through the edge of the entrance pupil is denoted by NSTA; a transverse aberration at 0.7 HOI of the sagittal ray fan aberration after the longest operation wavelength passing through the edge of the entrance pupil is denoted by SLTA; a transverse aberration at 0.7 HOI of the sagittal ray fan aberration after the shortest operation wavelength passing through the edge of the entrance pupil is denoted by SSTA.
[0040] For any surface of any lens, the profile curve length within a half the entrance pupil diameter (HEP) affects the ability of the surface to correct aberration and differences between optical paths of light in different fields of view. With longer profile curve length, the ability to correct aberration is better. However, the difficulty of manufacturing increases as well. Therefore, the profile curve length within a half the entrance pupil diameter (HEP) of any surface of any lens has to be controlled. The ratio between the profile curve length (ARE) within a half the entrance pupil diameter (HEP) of one surface and the thickness (TP) of the lens, which the surface belonged to, on the optical axis (i.e., ARE/TP) has to be particularly controlled. For example, the profile curve length of a half the entrance pupil diameter (HEP) of the object-side surface of the first lens is denoted by ARE11, the thickness of the first lens on the optical axis is TP1, and the ratio between these two parameters is ARE11/TP1; the profile curve length of a half the entrance pupil diameter (HEP) of the image-side surface of the first lens is denoted by ARE12, and the ratio between ARE12 and TP1 is ARE12/TP1. The profile curve length of a half the entrance pupil diameter (HEP) of the object-side surface of the second lens is denoted by ARE21, the thickness of the second lens on the optical axis is TP2, and the ratio between these two parameters is ARE21/TP2; the profile curve length of a half the entrance pupil diameter (HEP) of the image-side surface of the second lens is denoted by ARE22, and the ratio between ARE22 and TP2 is ARE22/TP2. For any surface of other lenses in the optical image capturing system, the ratio between the profile curve length of half the entrance pupil diameter (HEP) thereof and the thickness of the lens which the surface belonged to is denoted in the same manner.
[0041] The aspect of embodiment of the present disclosure further directs to a parking auxiliary method of a movable carrier auxiliary system, comprising following steps:
[0042] A. capture an environmental image around the movable carrier with the image capturing module;
[0043] B. receive the environmental image with the operation module, and analyze whether the environmental image has a space with a capacity greater than a volume of the movable carrier, and a length, a width, and a height of the space is greater than a length, a width, and a height of the movable carrier; if there is the space with the capacity greater than the volume of the movable carrier in the environmental image, and the length, the width, and the height of the space is greater than the length, the width, and the height of the movable carrier, the operation module determines the space is the parking space;
[0044] C. determine a distance between the parking space and the movable carrier and a relative position of the movable carrier and the parking space with the operation module based on the environmental image;
[0045] D. detect a movement state of the movable carrier with the state detecting device; and
[0046] E. generate the prompting message with the parking auxiliary device based on the distance between the movable carrier and the parking space, the relative position of the movable carrier and the parking space, and the movement state of the movable carrier which are obtained in step C, so that the driver manipulate the control device based on the prompting message to move the movable carrier to the parking space.
[0047] With the movable carrier auxiliary system and the parking auxiliary method thereof which are described above, the driver could effectively determine the environmental image has the parking space and generate the prompting message to prompt the driver to control the control device, improving the convenience and the safety when parking the movable carrier.
BRIEF DESCRIPTION OF THE SEVERAL VIEWS OF THE DRAWINGS
[0048] The present invention will be best understood by referring to the following detailed description of some illustrative embodiments in conjunction with the accompanying drawings, in which
[0049] FIG. 1A is a block diagram showing a movable carrier auxiliary system according to a first system embodiment of the present invention;
[0050] FIG. 1B is a schematic view showing the state detecting device according to the first system embodiment of the present invention;
[0051] FIG. 1C is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
[0052] FIG. 1D is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
[0053] FIG. 1E is a schematic perspective view showing a vehicle electronic rear-view mirror according to the first system embodiment of the present invention;
[0054] FIG. 1F is a schematic section view taken along the short side of the displaying device according to the first system embodiment of the present invention;
[0055] FIG. 1G is a flowchart of the parking auxiliary method of the movable carrier auxiliary system according to the first system embodiment of the present invention;
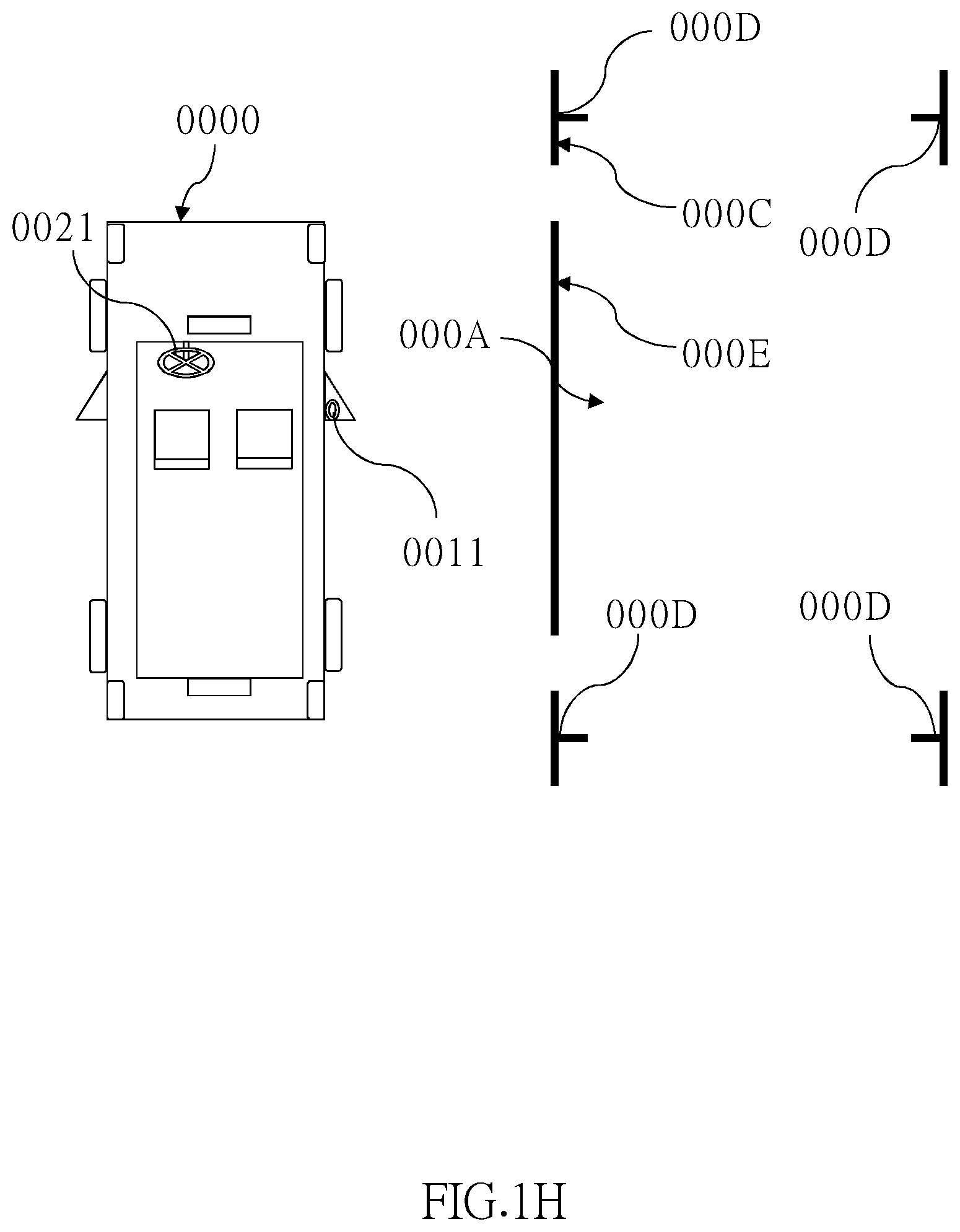
[0056] FIG. 1H is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
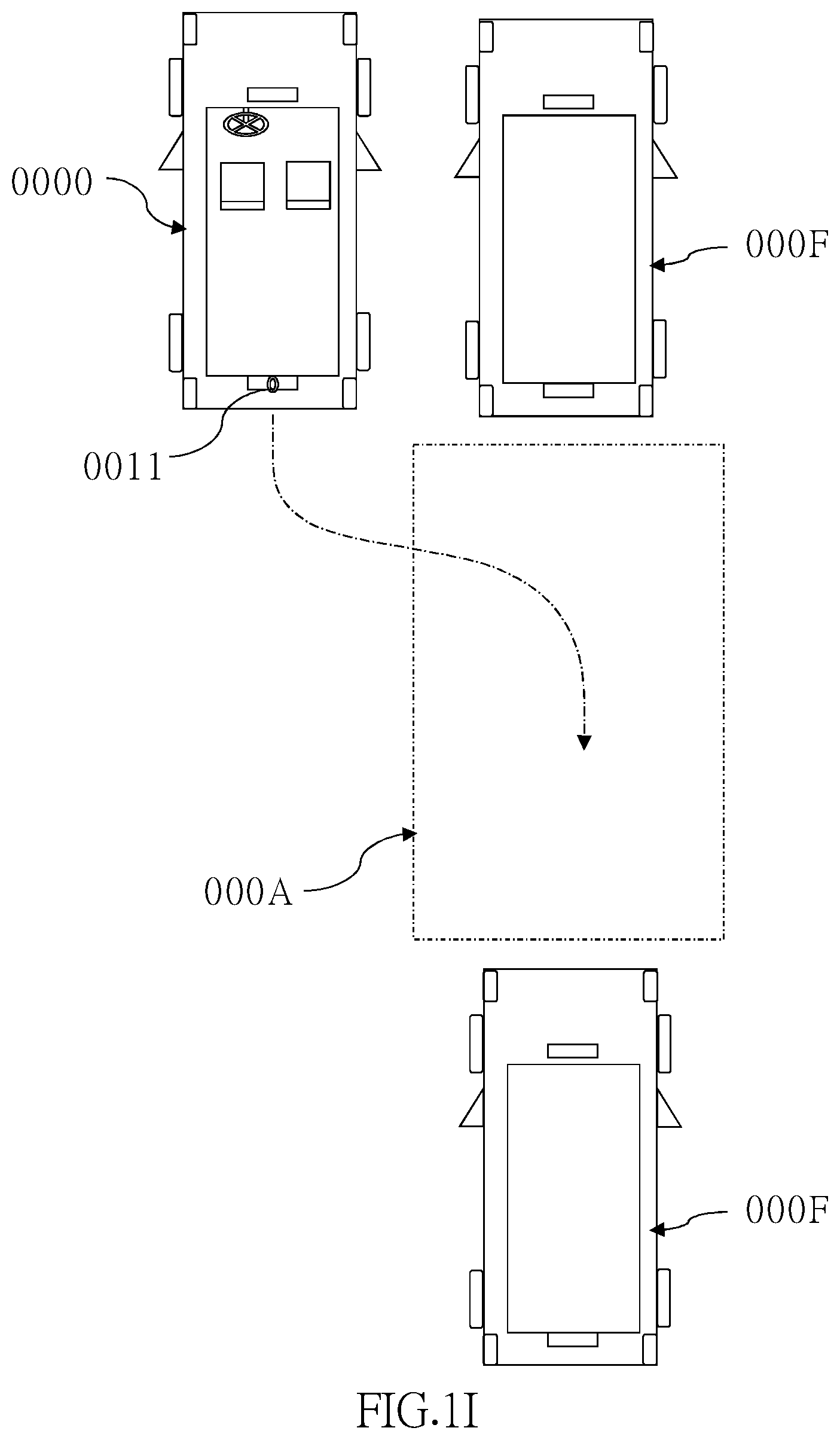
[0057] FIG. 1I is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
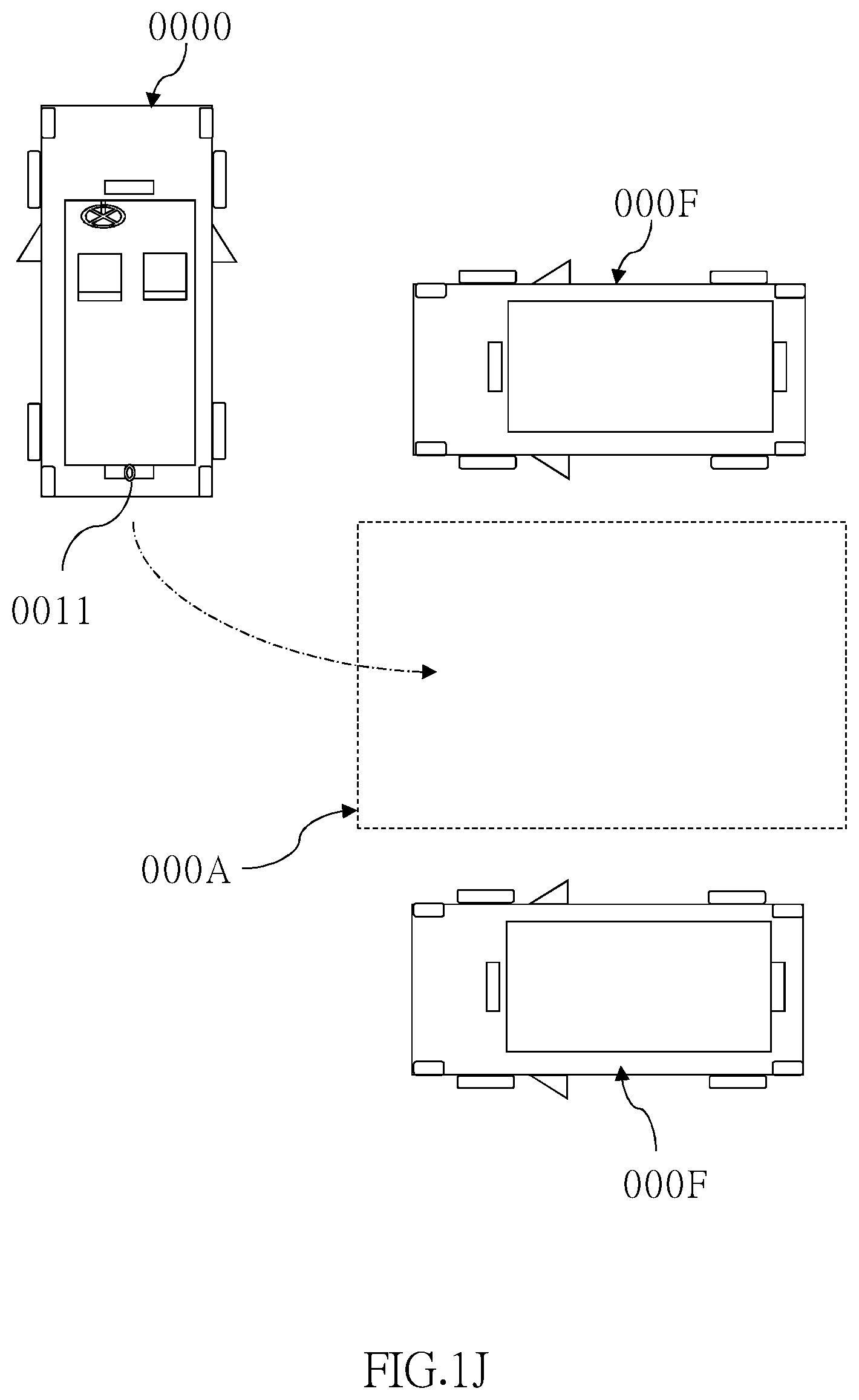
[0058] FIG. 1J is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
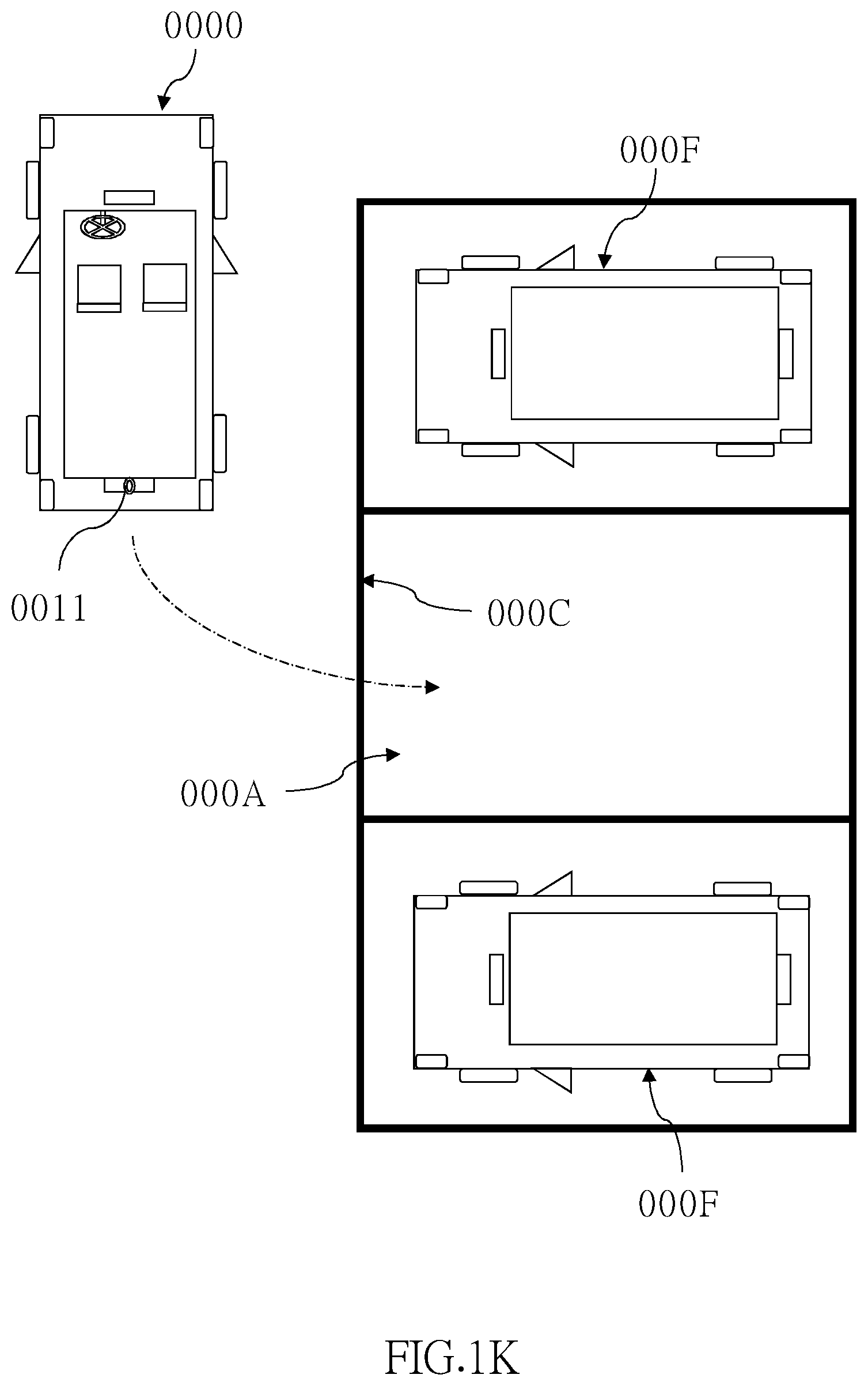
[0059] FIG. 1K is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
[0060] FIG. 1L is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to the first system embodiment of the present invention;
[0061] FIG. 1M is a schematic perspective view showing the movable carrier and the environment around the movable carrier according to a second system embodiment of the present invention;
[0062] FIG. 1N is a block diagram showing the movable carrier and the environment around the movable carrier according to the second system embodiment of the present invention;
[0063] FIG. 2A is a schematic diagram showing a first optical embodiment of the present invention;
[0064] FIG. 2B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system according to the first optical embodiment of the present invention in order from left to right;
[0065] FIG. 3A is a schematic diagram showing a second optical embodiment of the present invention;
[0066] FIG. 3B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system according to the second optical embodiment of the present application in order from left to right;
[0067] FIG. 4A is a schematic diagram showing a third optical embodiment of the present invention;
[0068] FIG. 4B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system according to the third optical embodiment of the present application in order from left to right;
[0069] FIG. 5A is a schematic diagram showing a fourth optical embodiment of the present invention;
[0070] FIG. 5B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system according to the fourth optical embodiment of the present application in order from left to right;
[0071] FIG. 6A is a schematic diagram showing a fifth optical embodiment of the present invention;
[0072] FIG. 6B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system according to the fifth optical embodiment of the present application in order from left to right;
[0073] FIG. 7A is a schematic diagram showing a sixth optical embodiment of the present invention; and
[0074] FIG. 7B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system according to the sixth optical embodiment of the present application in order from left to right.
DETAILED DESCRIPTION OF THE INVENTION
[0075] A movable carrier auxiliary system of the present invention mainly includes a system design and an optical design, wherein system embodiments will be described first.
[0076] Take FIG. 1A and FIG. 1B as an example to illustrate a schematic view of a movable carrier auxiliary system 0001 according to a first system embodiment of the present invention, wherein the movable carrier auxiliary system 0001 includes an environmental detecting device 0010, a control device 0020, a state detecting device 0030, and a parking auxiliary device 0040.
[0077] The environmental detecting device 0010 includes an image capturing module 0011 and an operation module 0013. As shown in FIG. 1C, the image capturing module 0011 is disposed in the movable carrier 0000 and is adapted to capture an environmental image around the movable carrier 0000. In the current embodiment, the image capturing module 0011 includes a lens group and an image sensing component, wherein the lens group includes at least two lenses having refractive power for imaging to the image sensing component to generate the environmental image. The conditions of the lens group will be described in the optical embodiments. Referring to FIG. 1C, the image capturing module 0011 is disposed on a right side of the movable carrier 0000 as an example, wherein the right side could be a right rear-view mirror. In an embodiment, the image capturing module 0011 could be disposed on a left side of the movable carrier 0000, for example, wherein the left side could be a left rear-view mirror.
[0078] In the current embodiment, the environmental detecting device 0010 further includes a luminance sensor 0012 electrically connected to the image capturing module 0011 for detecting the luminance on at least a direction in which the image capturing module 0011 captures the image. When the luminance measured by the luminance sensor 0012 is greater than an upper threshold, the image capturing module 0011 captures the environmental image in a way that reduces amount of light entering. When the luminance measured by the luminance sensor 0012 is less than a lower threshold, the image capturing module 0011 captures the environmental image in a way that increases the amount of light entering. In this way, an environmental image with appropriate luminance could be obtained, avoiding overexposure or underexposure.
[0079] The operation module 0013 is electrically connected to the image capturing module 0011 for receiving the environmental image and determines whether the environmental image has a parking space 000A or not, wherein a capacity of the parking space 000A is greater than a volume of the movable carrier 0000, and a length, a width, and a height of the parking space 000A is greater than a length, a width, and a height of the movable carrier 0000. More specifically, the operation module 0013 stores data of the length, the width, and the height of the movable carrier 0000 as a benchmark for determining the parking space 000A. The operation module 0013 determines a distance between the movable carrier 0000 and the parking space 000A and a relative position of the movable carrier 0000 and the parking space 000A via the environmental image.
[0080] In practice, the image capturing module 0011 could include two image capturing modules 0011, wherein depth of fields of the environmental images captured by the two image capturing modules 0011 are different. The operation module 0013 is electrically connected to the image capturing module 0011 determines whether there is a parking space 000A or not and determines the distance between the movable carrier 0000 and the parking space 000A and the relative position of the movable carrier 0000 and the parking space 000A via a three-dimensional environmental image formed by the environmental images captured by the two image capturing modules 0011.
[0081] The control device 0020 is disposed in the movable carrier 0000 for being manipulated by a driver to move the movable carrier 0000, and includes a steering wheel 0021, a gear shift module 0022, a driving pedal 0023, and a braking pedal 0024.
[0082] The state detecting device 0030 is disposed in the movable carrier 0000 for detecting a movement state of the movable carrier 0000. Referring to FIG. 1B, the state detecting device 0030 at least includes a speed sensor 0031 for detecting a speed of the movable carrier 0000. The movement state at least includes the speed of the movable carrier 0000. The state detecting device 0030 could further include at least one of a steering angle sensor 0032 and an inertial sensor 0033, wherein the steering angle sensor 0032 is adapted to detect a steering angle of the movable carrier 0000, and the inertial sensor 0033 is adapted to detect an acceleration, an inclination angle, or a yaw rate of the movable carrier 0000. The movement state could include a detecting result of at least one of the steering angle sensor 0032 and the inertial sensor 0033.
[0083] The parking auxiliary device 0040 is disposed in the movable carrier 0000 and is electrically connected to the operation module 0013 of the environmental detecting device 0010, the state detecting device 0030, and the control device 0020. When the environmental image has the parking space 000A, the parking auxiliary device 0040 generates a prompting message based on the distance between the movable carrier 0000 and the parking space 000A, the relative position of the movable carrier 0000 and the parking space 000A, and the movement state of the movable carrier 0000, so that the driver could control the control device 0020 to move the movable carrier 0000 to the parking space 000A based on the prompting message. In the current embodiment, the parking auxiliary device 0040 generates the prompting message based on the distance between the movable carrier 0000 and the parking space 000A, the relative position of the movable carrier 0000 and the parking space 000A, and the speed, the steering angle, the acceleration, the inclination angle, and the yaw rate of the movable carrier 0000.
[0084] The parking auxiliary device 0040 generates the prompting message which corresponds to a steering direction and a steering margin, and corresponds to a gear position of the gear shift module 0022, and corresponds to whether the driving pedal 0023 is pedaled or not, and corresponds to whether the braking pedal 0024 is pedaled or not, so that the driver could control the steering wheel 0021, the gear shift module 0022, the driving pedal 0023, and the braking pedal 0024 based on the prompting message to move the movable carrier 0000 to the parking space 000A.
[0085] In an embodiment, the parking auxiliary device 0040 could automatically control the steering wheel 0021 to rotate, and could generates the prompting message which corresponds to the gear position of the gear shift module 0022, and corresponds to whether the driving pedal 0023 is pedaled or not, and corresponds to whether the braking pedal 0024 is pedaled or not. In this way, the driver could park the movable carrier 0000 without controlling the steering wheel 0021.
[0086] In an embodiment, the parking auxiliary device 0040 could automatically control the steering wheel 0021 to rotate, and could automatically control the operations of the driving pedal 0023 and the braking pedal 0024, and could generates the prompting message which corresponds to the gear position of the gear shift module 0022. In this way, all the driver has to do during the parking process is to control the gear shift module 0022 to be a forward gear or a reverse gear.
[0087] In order to increase the safety during the parking process, when the parking auxiliary device 0040 determines that a movement speed of the movable carrier 0000 measured by the speed sensor 031 of the state detecting device 0030 is less than or equal to a starting speed, the parking auxiliary device 0040 generates the prompting message. When the movement speed of the movable carrier 0000 measured by the speed sensor 031 is greater than the starting speed, the parking auxiliary device 0040 does not generate the prompting message, thereby to prevent the driver from not having sufficient time to react.
[0088] In the current embodiment, the operation module 0013 could further determine whether the environmental image has an obstruction 000B located between the movable carrier 0000 and the parking space 000A. The parking auxiliary device 0040 further includes a warning module 0041, wherein when the driver controls the control device 0020 based on the prompting message and the environmental image has the obstruction 000B located between the movable carrier 0000 and the parking space 000A (as shown in FIG. 1D), the warning module 0041 generates a warning message. The warning module 0041 at least includes one of a voice playback member 004a, a light generating member 004b, and an image displaying member 004c, thereby to present the warning message in forms of sounds, lights, or both of sounds and lights, or displaying an image or a text, or both of the image and the text.
[0089] In an embodiment, the parking auxiliary device 0040 at least includes the voice playback member 004a, wherein the warning message is presented by playing a corresponding voice of the warning message via the voice playback member 004a.
[0090] In addition to determining the parking space 000A via the environmental image, the environmental detecting device 0010 further includes a detection wave transceiver module 0014 electrically connected to the operation module 0013. The detection wave transceiver module 0014 sends a detection wave in at least a direction which is not a traveling direction of the movable carrier 0000 (e.g. a rightward direction of the movable carrier 0000), and receives a reflection detection wave of the detection wave, wherein the detection wave could be ultrasonic wave, millimeter wave radar, lidar, infrared light, laser, or a combination of the foregoing. The operation module 0013 further determines whether the environmental image has the parking space 000A or not via the reflection detection wave and the environmental image, thereby to determine a correctness of the parking space 000A via the environmental image and the reflection detection wave.
[0091] Additionally, the detection wave transceiver module 0014 could also send a detection wave in a traveling direction of the movable carrier 0000 (e.g. a frontward or a backward direction of the movable carrier 0000), and receives a reflection detection wave of the detection wave. The operation module 0013 determines the distance between the movable carrier 0000 and the parking space 000A and the relative position of the movable carrier 0000 and the parking space 000A via the reflection detection wave and the environmental image, thereby to determine a correctness of the distance between the movable carrier 0000 and the parking space 000A and the relative position of the movable carrier 0000 and the parking space 000A via the environmental image and the reflection detection wave.
[0092] The parking auxiliary device 0040 further includes a displaying module 0042 electrically connected to the environmental detecting device 0010, wherein the prompting message is displayed on the displaying module 0042 as an image, a text, or both of the image and the text.
[0093] FIG. 1E is a schematic perspective view showing the displaying module 0042 according to the first system embodiment of the present invention, in which the displaying module 0042 is a vehicle electronic rear-view mirror 0100 having a display (not shown), for example. FIG. 1F is a schematic section view taken along the short side of the displaying module of FIG. 1E. The vehicle electronic rear-view mirror 0100 could be disposed on a movable carrier, e.g. a vehicle, to assist in the driving of the vehicle or to provide information about driving. More specifically, the vehicle electronic rear-view mirror 0100 could be an inner rear-view mirror disposed inside the vehicle or an outer rear-view mirror disposed outside the vehicle, both of which are used to assist the driver in understanding the location of other vehicles. However, this is not a limitation on the present invention. In addition, the movable carrier is not limited to the vehicle, and could be other types of transportation, such as a land train, an aircraft, a water ship, etc.
[0094] The vehicle electronic rear-view mirror 0100 is assembled in a casing 0110, wherein the casing 0110 has an opening (not shown). More specifically, the opening of the casing 0110 overlaps with a reflective layer 0190 of the vehicle electronic rear-view mirror 0100. In this way, external light could be transmitted to the reflective layer 0190 located inside the casing 0110 through the opening, so that the vehicle electronic rear-view mirror 0100 functions as a mirror. When the driver drives the vehicle and faces the opening, for example, the driver could perceive the external light reflected by the vehicle electronic rear-view mirror 0100, thereby knowing the position of the rear vehicle.
[0095] Referring to FIG. 1F, the vehicle electronic rear-view mirror 0100 includes a first transparent assembly 0120 and a second transparent assembly 0130, wherein the first transparent assembly 0120 faces the driver, and the second transparent assembly 0130 is disposed on a side away from the driver. More specifically, the first transparent assembly 0120 and the second transparent assembly 0130 are translucent substrates, wherein a material of the translucent substrates could be glass, for example. However, the material of the translucent substrates is not a limitation on the present invention. In other embodiments, the material of the translucent substrates could be plastic, quartz, PET substrate, or other applicable materials, wherein the PET substrate has the advantages of low cost, easy manufacture, and extremely thinness, in addition to the packaging and protection effects.
[0096] In this embodiment, the first transparent assembly 0120 includes a first incidence surface 0122 and a first exit surface 0124, wherein an incoming light image from the rear of the driver enters the first transparent assembly 0120 via the first incidence surface 0122, and is emitted via the first exit surface 0124. The second transparent assembly 0130 includes a second incidence surface 0132 and a second exit surface 0134, wherein the second incidence surface 0132 faces the first exit surface 0124, and a gap is formed between the second incidence surface 0132 and the first exit surface 0124 by an adhesive 0114. After being emitted via the first exit surface 0124, the incoming light image enters the second transparent assembly 0130 via the second incidence surface 0132 and emitted via the second exit surface 0134.
[0097] An electro-optic medium layer 0140 is disposed in the gap between the first exit surface 0124 of the first transparent assembly 0120 and the second incidence surface 0132 of the second transparent assembly 0130. At least one transparent electrode 0150 is disposed between the first transparent assembly 0120 and the electro-optic medium layer 0140. The electro-optic medium layer 0140 is disposed between the first transparent assembly 0120 and at least one reflective layer 0190. A transparent conductive layer 0160 is disposed between the first transparent assembly 0120 and the electro-optic medium layer 0140. Another transparent conductive layer 0160 is disposed between the second transparent assembly 0130 and the electro-optic medium layer 0140. An electrical connector 0170 is electrically connected to the transparent conductive layer 0160, and another electrical connector 0170 is electrically connected to the transparent electrode 0150, which is electrically connected to the electro-optic medium layer 0140 directly or indirectly through the another transparent conductive layer 0160, thereby transmitting electrical energy to the electro-optic medium layer 0140 to change a transparency of the electro-optic medium layer 0140. When a luminance of the incoming light image exceeds a certain luminance (e.g. strong light from the headlight of the rear vehicle), a glare sensor 0112 electrically connected to a control member 0180 receives the light energy and convert it into a signal, and the control member 0180 determines whether the luminance of the incoming light image exceeds a predetermined luminance, and if a glare is generated, the electrical energy is provided to the electro-optic medium layer 0140 by the electrical connector 0170 to generate an anti-glare performance Generally, if the incoming light image has a strong luminance, the glare could be generated and thus affects the driver's line of sight, thereby endangering the driving safety.
[0098] In addition, the transparent electrode 0150 and the reflective layer 0190 could respectively cover the entire surfaces of the first transparent assembly 0120 and the second transparent assembly 0130. However, this is not a limitation on the present invention. In this embodiment, the transparent electrode 0150 could use a material selected from metal oxides, such as indium tin oxide, indium zinc oxide, aluminum tin oxide, aluminum zinc oxide, indium antimony zinc oxide, or other suitable oxides, or a stacked layer composed of at least two of the foregoing oxides. Moreover, the reflective layer 0190 could be conductive and made of a material selected from the group consisting of silver (Ag), copper (Cu), aluminum (Al), titanium (Ti), chromium (Cr), molybdenum (Mo), and an alloy thereof, or contains silicon dioxide or a transparent conductive material. However, the material of the transparent electrode 0150 and the material of the reflective layer 0190 are not limitations on the present invention. In other embodiments, the material of the transparent electrode 0150 and the material of the reflective layer 0190 could be other types of materials.
[0099] The electro-optic medium layer 0140 could be made of an organic material or an inorganic material. However, this is not a limitation on the present invention. In the current embodiment, the electro-optic medium layer 0140 could be an electrochromic material. The electro-optic medium layer 0140 is disposed between the first transparent assembly 0120 and the second transparent assembly 0130 and also disposed between the first transparent assembly 0120 and the reflective layer 0190. More specifically, the transparent electrode 0150 is disposed between the first transparent assembly 0120 and the electro-optic medium layer 0140 (i.e., the electrochromic material layer). In an embodiment, the reflective layer 0190 could be disposed between the second transparent assembly 0130 and the electro-optic medium layer 0140. In addition, in the current embodiment, the vehicle electronic rear-view mirror 0100 further includes an adhesive 0114 located between the first transparent assembly 0120 and the second transparent assembly 0130 and surrounding the electro-optic medium layer 0140. The electro-optic medium layer 0140 is co-packaged by the adhesive 0114, the first transparent assembly 0120, and the second transparent assembly 0130.
[0100] In the current embodiment, the transparent conductive layer 0160 is disposed between the electro-optic medium layer 0140 and the reflective layer 0190. More specifically, the transparent conductive layer 0160 could be used as an anti-oxidation layer of the reflective layer 0190, so that the electro-optic medium layer 0140 could be prevented from direct contact with the reflective layer 0190, thereby preventing the reflective layer 0190 from being corroded by the organic materials, and extending the service life of the vehicle electronic rear-view mirror 0100 of the current embodiment. In addition, the electro-optic medium layer 0140 is co-packaged by the adhesive 0114, the transparent electrode 0150, and the transparent conductive layer 0160. In the current embodiment, the transparent conductive layer 0160 contains a material selected from the group consisting of indium tin oxide (ITO), indium zinc oxide (IZO), Al-doped ZnO (AZO), fluorine-doped tin oxide, and a combination thereof.
[0101] In the current embodiment, the vehicle electronic rear-view mirror 0100 could be optionally provided with the electrical connector 0170. For instance, in an embodiment, the electrical connector 0170 could be a conducting wire or a conducting structure electrically connected to the transparent electrode 0150 and the reflective layer 0190, so that the transparent electrode 0150 and the reflective layer 0190 could be electrically connected to the at least one control member 0180, which provides a driving signal via the conducting wire or the conducting structure, thereby driving the electro-optic medium layer 0140.
[0102] When the electro-optic medium layer 0140 is enabled, the electro-optic medium layer 0140 would undergo an electrochemical redox reaction and change its energy level to be in a diming state. When external light passes through the opening of the casing 0110 and reaches the electro-optic medium layer 0140, the external light would be absorbed by the electro-optic medium layer 0140 which is in the diming state, so that the vehicle electronic rear-view mirror 0100 is switched to an anti-glare mode. On the other hand, when the electro-optic medium layer 0140 is disenabled, the electro-optic medium layer 0140 is transparent. At this time, the external light passing through the opening of the casing 0110 passes through the electro-optic medium layer 0140 to be reflected by the reflective layer 0190, so that the vehicle electronic rear-view mirror 0100 is switched to a mirror mode.
[0103] More specifically, the first transparent assembly 0120 has the first incidence surface 0122 which is away from the second transparent assembly 0130. For instance, external light from the rear vehicles enters the vehicle electronic rear-view mirror 0100 via the first incidence surface 0122, and then the vehicle electronic rear-view mirror 0100 reflects the external light such that the external light leaves the vehicle electronic rear-view mirror 0100 via the first incidence surface 0122. In addition, eyes of the vehicle driver could receive the external light reflected by the vehicle electronic rear-view mirror 0100 to know the position of other vehicles behind. Moreover, the reflective layer 0190 could have the optical property of partial transmission and partial reflection by selecting a suitable material and designing a proper film thickness.
[0104] The display of the vehicle electronic rear-view mirror 0100 could be an LCD or an LED, and the display could be disposed inside or outside the casing 0110, for example, on the side of the second transparent assembly 0130 away from the first transparent assembly 0120, or on the second exit surface 0134 of the second transparent assembly 0130 away from the first transparent assembly 0120. Since the reflective layer 0190 has the optical property of partial transmission and partial reflection, the image light emitted by the display could pass through the reflective layer 0190, thereby allowing the user to view the internal image displayed by the display so as to display the warning message.
[0105] With the aforementioned movable carrier auxiliary system, a parking auxiliary method illustrated in FIG. 1G which includes following steps could be executed.
[0106] Step S1: the image capturing module 0011 captures an environmental image around the movable carrier 0000.
[0107] Step S2: the operation module 0013 receives the environmental image and analyzes whether the environmental image has a space with a capacity greater than a volume of the movable carrier 0000, and a length, a width, and a height of the space is greater than a length, a width, and a height of the movable carrier; if there is the space with the capacity greater than the volume of the movable carrier in the environmental image, and the length, the width, and the height of the space is greater than the length, the width, and the height of the movable carrier, the operation module 0013 determines the space is the parking space 000A.
[0108] A plurality of determining ways which could be applied to the operation module 0013 are provided followed, so that the operation module 0013 in step S2 could determine the environmental image has the parking space 000A.
[0109] (1) Referring to FIG. 1C, the operation module 0013 first determines whether the environmental image has a parking grid marking 000C. If there is the parking grid marking 000C in the environmental image, the operation module 0013 determines whether an area within the parking grid marking 000C has the parking space 000A or not.
[0110] (2) Referring to FIG. 1H, the operation module 0013 first analyzes whether the environmental image has a line image forming a plurality of corners 000D, and selects and determines the line image with two corners 000D as the parking grid marking 000C, and then determines whether an area between the two corners 000D has the parking space 000A or not. The two selected corners 000D could be adjacent corners 000D or diagonally opposite corners 000D. The environment shown in FIG. 1C could also apply the way (2) to determine the parking space 000A with the plurality of corners 000D.
[0111] (3) Referring to FIG. 1H, the operation module 0013 first analyzes whether the environmental image has a line image forming a plurality of corners 000D, and selects the line image with two adjacent corners 000D, and determines whether there is a line marking 000E between the two adjacent corners 000D or not. If there is the line marking 000E between the two adjacent corners 000D, the line image with two corners 000D is selected and determined as the parking grid marking 000C, and then the operation module 0013 determines whether an area surrounded by the two adjacent corners 000D and the line marking 000E has the parking space 000A or not. The environment shown in FIG. 1C could also apply the way (3) to determine the parking space 000A with the plurality of corners 000D and one of lines of the parking grid marking 000C (i.e., the line marking 000E).
[0112] (4) Referring to FIG. 1I, the image capturing module 0011 is disposed on a backside of the movable carrier 0000 as an example for capturing an environmental image on a rearward of the movable carrier 0000, wherein the backside of the movable carrier 0000 could be, for example, around a trunk of the movable carrier 0000 or on a rear bumper. The operation module 0013 first determines whether the environmental image has two shunned carriers 000F. If the environmental image has the two shunned carriers 000F, the operation module 0013 determines whether an area between the two shunned carriers 000F has the parking space 000A or not. If the area between the two shunned carriers 000F has the parking space 000A, the operation module 0013 determines whether one of the shunned carriers 000F moves or not, wherein the warning message is generated when one of the shunned carriers 000F is determined moves.
[0113] An environment shown in FIG. 1J could also apply the way (4) to determine the parking space 000A.
[0114] An environment shown in FIG. 1K which has both of the parking grid marking 000C and the shunned carriers 000F could also apply one of the ways (1) to (4) to determine the parking space 000A.
[0115] Referring to FIG. 1L, the image capturing module 0011 is disposed on a front side of the movable carrier 0000 as an example for capturing and generating the environmental image which is in front of the movable carrier 0000. The front side of the movable carrier 0000 could be, for example, a side of a head of a vehicle, a vicinity of the front windshield inside the vehicle, or a side of the front bumper. An environment shown in FIG. 1L which has both of the parking grid marking 000C and the shunned carriers 000F could also apply one of the ways (1) to (4) to determine the parking space 000A.
[0116] Step S3: the operation module 0013 determines the distance between the parking space 000A and the movable carrier 0000 and the relative position of the parking space 000A and the movable carrier 0000 via the environmental image.
[0117] Step S4: the state detecting device 0030 detects the movement state of the movable carrier 0000, wherein the movement state at least includes the speed of the movable carrier 0000.
[0118] Step S5: the parking auxiliary device 0040 generates the prompting message by deriving based on the distance between the parking space 000A and the movable carrier 0000 and the relative position of the parking space 000A and the movable carrier 0000 obtained in step S3 and the movement state obtained in step S4, thereby the driver could manipulate the control device 0020 based on the prompting message to move the movable carrier 0000 to the parking space 000A. In the current embodiment, when the movement speed of the movable carrier 0000 measured by the state detecting device 0030 is less than or equal to the starting speed, the parking auxiliary device 0040 generates the prompting message.
[0119] Referring to FIG. 1D, when the driver manipulates the control device 0020 based on the prompting message and when there is the obstruction 000B located between the movable carrier 0000 and the parking space 000A in the environmental image, the parking auxiliary device 0040 generates the warning message.
[0120] FIG. 1M illustrates a movable carrier 0002 according to a second system embodiment of the present invention. FIG. 1N is a block diagram showing the movable carrier auxiliary system 0003 according to the second system embodiment.
[0121] The movable carrier auxiliary system 0003 according to the second system embodiment has almost the same structure with that of the first system embodiment, except that the environmental detecting device 0010 includes four image capturing modules 0011 and four luminance sensors 0012, wherein the image capturing modules 0011 are respectively disposed on a front side, a backside, a left side, and a right side of the movable carrier 0002 for capturing environmental images on a frontward, a rearward, a leftward, and a rightward of the movable carrier 0002.
[0122] The operation module 0013 detects whether an environmental image spliced by the environmental images that the four image capturing modules 0011 capture has the parking space 000A. A horizontal angle of view covered by the environmental image spliced by the environmental images that the four image capturing modules 0011 capture is 360 degrees. The environmental image spliced by the environmental images that the image capturing modules 0011 capture could be spliced by the operation module 0013. The movable carrier auxiliary system 0003 according to the second system embodiment could also apply the parking auxiliary method of the first system embodiment, thus we are not going to describe it in details herein.
[0123] However, the number of the image capturing module 0011 is not a limitation of the present invention. In other embodiments, the number of the image capturing module 0011 could be two, three, or more than five.
[0124] Furthermore, the optical embodiments will be described in detail as follows. The optical image capturing system could work with three wavelengths, including 486.1 nm, 587.5 nm, and 656.2 nm, wherein 587.5 nm is the main reference wavelength and is also the reference wavelength for extracting the technical characteristics. The optical image capturing system could also work with five wavelengths, including 470 nm, 510 nm, 555 nm, 610 nm, and 650 nm, wherein 555 nm is the main reference wavelength and is also the reference wavelength for extracting the technical characteristics.
[0125] The optical image capturing system of the present invention satisfies 0.5.ltoreq..SIGMA.PPR/|.SIGMA.NPR|.ltoreq.15, and preferably satisfies 1.ltoreq..SIGMA.PPR/|.SIGMA.NPR|.ltoreq.3.0, where PPR is a ratio of the focal length f of the optical image capturing system to a focal length fp of each of the lenses with positive refractive power; NPR is a ratio of the focal length f of the optical image capturing system to a focal length fn of each of the lenses with negative refractive power; .SIGMA.PPR is a sum of the PPRs of each positive lens; and .SIGMA.NPR is a sum of the NPRs of each negative lens. It is helpful for control of an entire refractive power and an entire length of the optical image capturing system.
[0126] The optical image capturing system further includes an image sensor provided on the image plane. The optical image capturing system of the present invention satisfies HOS/HOI.ltoreq.50 and 0.5.ltoreq.HOS/f.ltoreq.150, and preferably satisfies 1.ltoreq.HOS/HOI.ltoreq.40 and 1.ltoreq.HOS/f.ltoreq.140, where HOI is half a length of a diagonal of an effective sensing area of the image sensor, i.e., the maximum image height, and HOS is a distance in parallel with the optical axis between an object-side surface of the first lens and the image plane of the at least one lens group. It is helpful for the miniaturization of the optical image capturing system and the application in light, thin, and portable electronic products.
[0127] The optical image capturing system of the present invention is further provided with an aperture to increase image quality.
[0128] In the optical image capturing system of the present invention, the aperture could be a front aperture or a middle aperture, wherein the front aperture is provided between the object and the first lens, and the middle aperture is provided between the first lens and the image plane. The front aperture provides a relatively long distance between an exit pupil of the optical image capturing system and the image plane, which allows more optical elements to be installed and increases the image receiving efficiency of the image sensor. The middle aperture could enlarge the view angle of the optical image capturing system, which provides the advantage of a wide-angle lens. The optical image capturing system satisfies 0.1.ltoreq.InS/HOS.ltoreq.1.1, where InS is a distance on the optical axis between the aperture and an image plane of the at least one lens group. It is helpful for size reduction and wide angle.
[0129] The optical image capturing system of the present invention satisfies 0.1.ltoreq..SIGMA.TP/InTL.ltoreq.0.9, where InTL is a distance in parallel with the optical axis from the object-side surface of the first lens to an image-side surface of the sixth lens, and .SIGMA.TP is a sum of central thicknesses of the lenses having refractive power on the optical axis. It is helpful for the contrast of image and yield rate of lens manufacturing, and also provides a suitable back focal length for installation of other elements.
[0130] The optical image capturing system of the present invention satisfies 0.001.ltoreq.|R1/R2|.ltoreq.25, and preferably satisfies 0.01.ltoreq.|R1/R2|<12, where R1 is a radius of curvature of the object-side surface of the first lens, and R2 is a radius of curvature of the image-side surface of the first lens. It provides the first lens with a suitable positive refractive power to reduce the increase rate of the spherical aberration.
[0131] The optical image capturing system of the present invention satisfies -7<(R11-R12)/(R11+R12)<50, where R11 is a radius of curvature of the object-side surface of the sixth lens, and R12 is a radius of curvature of the image-side surface of the sixth lens. It may modify the astigmatic field curvature.
[0132] The optical image capturing system of the present invention satisfies IN12/f.ltoreq.60, where IN12 is a distance on the optical axis between the first lens and the second lens. It may correct chromatic aberration and improve the performance.
[0133] The optical image capturing system of the present invention satisfies IN56/f.ltoreq.3.0, where IN56 is a distance on the optical axis between the fifth lens and the sixth lens. It may correct chromatic aberration and improve the performance.
[0134] The optical image capturing system of the present invention satisfies 0.1.ltoreq.(TP1+IN12)/TP2.ltoreq.10, where TP1 is a central thickness of the first lens on the optical axis, and TP2 is a central thickness of the second lens on the optical axis. It may control the sensitivity of manufacture of the optical image capturing system and improve the performance.
[0135] The optical image capturing system of the present invention satisfies 0.1.ltoreq.(TP6+IN56)/TP5.ltoreq.15, where TP5 is a central thickness of the fifth lens on the optical axis, TP6 is a central thickness of the sixth lens on the optical axis, and IN56 is a distance between the fifth lens and the sixth lens. It may control the sensitivity of manufacture of the optical image capturing system and improve the performance.
[0136] The optical image capturing system of the present invention satisfies 0.1.ltoreq.TP4/(IN34+TP4+IN45).ltoreq.1, where TP2 is a central thickness of the second lens on the optical axis, TP3 is a central thickness of the third lens on the optical axis, TP4 is a central thickness of the fourth lens on the optical axis, IN34 is a distance on the optical axis between the third lens and the fourth lens, and IN45 is a distance on the optical axis between the fourth lens and the fifth lens. It may fine-tune and correct the aberration of the incident rays layer by layer, and reduce the overall height of the optical image capturing system.
[0137] The optical image capturing system satisfies 0 mm.ltoreq.HVT61.ltoreq.3 mm; 0 mm<HVT62.ltoreq.6 mm; 0.ltoreq.HVT61/HVT62; 0 mm.ltoreq.|SGC61|.ltoreq.0.5 mm; 0 mm<|SGC62|.ltoreq.2 mm; and 0<|SGC62|/(|SGC62|+TP6).ltoreq.0.9, where HVT61 is a vertical distance from the critical point C61 on the object-side surface of the sixth lens to the optical axis; HVT62 is a vertical distance from the critical point C62 on the image-side surface of the sixth lens to the optical axis; SGC61 is a distance on the optical axis between a point on the object-side surface of the sixth lens where the optical axis passes through and a point where the critical point C61 projects on the optical axis; SGC62 is a distance on the optical axis between a point on the image-side surface of the sixth lens where the optical axis passes through and a point where the critical point C62 projects on the optical axis. It is helpful to correct the off-axis view field aberration.
[0138] The optical image capturing system satisfies 0.2.ltoreq.HVT62/HOI.ltoreq.0.9, and preferably satisfies 0.3.ltoreq.HVT62/HOI.ltoreq.0.8. It may help to correct the peripheral aberration.
[0139] The optical image capturing system satisfies 0.ltoreq.HVT62/HOS.ltoreq.0.5, and preferably satisfies 0.2.ltoreq.HVT62/HOS.ltoreq.0.45. It may help to correct the peripheral aberration.
[0140] The optical image capturing system of the present invention satisfies 0<SGI611/(SGI611+TP6).ltoreq.0.9; 0<SGI621/(SGI621+TP6).ltoreq.0.9, and preferably satisfies 0.1.ltoreq.SGI611/(SGI611+TP6).ltoreq.0.6; 0.1.ltoreq.SGI621/(SGI621+TP7).ltoreq.0.6, where SGI611 is a displacement on the optical axis from a point on the object-side surface of the sixth lens, through which the optical axis passes, to a point where the inflection point on the object-side surface of the sixth lens, which is the closest to the optical axis, projects on the optical axis, and SGI621 is a displacement on the optical axis from a point on the image-side surface of the sixth lens, through which the optical axis passes, to a point where the inflection point on the image-side surface of the sixth lens, which is the closest to the optical axis, projects on the optical axis.
[0141] The optical image capturing system of the present invention satisfies 0<SGI612/(SGI612+TP6).ltoreq.0.9; 0<SGI622/(SGI622+TP6).ltoreq.0.9, and it is preferable to satisfy 0.1.ltoreq.SGI612/(SGI612+TP6).ltoreq.0.6; 0.1.ltoreq.SGI622/(SGI622+TP6).ltoreq.0.6, where SGI612 is a displacement on the optical axis from a point on the object-side surface of the sixth lens, through which the optical axis passes, to a point where the inflection point on the object-side surface, which is the second closest to the optical axis, projects on the optical axis, and SGI622 is a displacement on the optical axis from a point on the image-side surface of the sixth lens, through which the optical axis passes, to a point where the inflection point on the object-side surface, which is the second closest to the optical axis, projects on the optical axis.
[0142] The optical image capturing system of the present invention satisfies 0.001 mm.ltoreq.|HIF611|.ltoreq.5 mm; 0.001 mm.ltoreq.|HIF621|.ltoreq.5 mm, and it is preferable to satisfy 0.1 mm.ltoreq.|HIF611|.ltoreq.3.5 mm; 1.5 mm.ltoreq.|HIF621|.ltoreq.3.5 mm, where HIF611 is a vertical distance from the inflection point closest to the optical axis on the object-side surface of the sixth lens to the optical axis; HIF621 is a vertical distance from the inflection point closest to the optical axis on the image-side surface of the sixth lens to the optical axis.
[0143] The optical image capturing system of the present invention satisfies 0.001 mm.ltoreq.|HIF612|.ltoreq.5 mm; 0.001 mm.ltoreq.|HIF622|.ltoreq.5 mm, and it is preferable to satisfy 0.1 mm.ltoreq.|HIF622|.ltoreq.3.5 mm; 0.1 mm.ltoreq.|HIF612|.ltoreq.3.5 mm, where HIF612 is a vertical distance from the inflection point second closest to the optical axis on the object-side surface of the sixth lens to the optical axis; HIF622 is a vertical distance from the inflection point second closest to the optical axis on the image-side surface of the sixth lens to the optical axis.
[0144] The optical image capturing system of the present invention satisfies 0.001 mm.ltoreq.|HIF613|.ltoreq.5 mm; 0.001 mm.ltoreq.|HIF623|.ltoreq.5 mm, and it is preferable to satisfy 0.1 mm.ltoreq.|HIF623|.ltoreq.3.5 mm; 0.1 mm.ltoreq.|HIF613|.ltoreq.3.5 mm, where HIF613 is a vertical distance from the inflection point third closest to the optical axis on the object-side surface of the sixth lens to the optical axis; HIF623 is a vertical distance from the inflection point third closest to the optical axis on the image-side surface of the sixth lens to the optical axis.
[0145] The optical image capturing system of the present invention satisfies 0.001 mm.ltoreq.|HIF614|.ltoreq.5 mm; 0.001 mm.ltoreq.|HIF624|.ltoreq.5 mm, and it is preferable to satisfy 0.1 mm.ltoreq.|HIF624|.ltoreq.3.5 mm; 0.1 mm.ltoreq.|HIF614|.ltoreq.3.5 mm, where HIF614 is a vertical distance from the inflection point fourth closest to the optical axis on the object-side surface of the sixth lens to the optical axis; HIF624 is a vertical distance from the inflection point fourth closest to the optical axis on the image-side surface of the sixth lens to the optical axis.
[0146] In an embodiment, the lenses of high Abbe number and the lenses of low Abbe number are arranged in an interlaced arrangement that could be helpful for correction of aberration of the optical image capturing system.
[0147] An equation of aspheric surface is
z=ch.sup.2/[1+[1(k+1)c.sup.2h.sup.2].sup.0.5]+A4h.sup.4.+-.A6h.sup.6+A8h- .sup.8+A10h.sup.10+A12h.sup.12+A14h.sup.14+A16h.sup.16+A18h.sup.18+A20h.su- p.20+ (1)
[0148] where z is a depression of the aspheric surface; k is conic constant; c is reciprocal of the radius of curvature; and A4, A6, A8, A10, A12, A14, A16, A18, and A20 are high-order aspheric coefficients.
[0149] In the optical image capturing system, the lenses could be made of plastic or glass. The plastic lenses may reduce the weight and lower the cost of the optical image capturing system, and the glass lenses may control the thermal effect and enlarge the space for arrangement of the refractive power of the optical image capturing system. In addition, the opposite surfaces (object-side surface and image-side surface) of the first to the seventh lenses could be aspheric that could obtain more control parameters to reduce aberration. The number of aspheric glass lenses could be less than the conventional spherical glass lenses, which is helpful for reduction of the height of the optical image capturing system.
[0150] Furthermore, in the optical image capturing system provided by the present invention, when the lens has a convex surface, it means that the surface of the lens around the optical axis is convex, and when the lens has a concave surface, it means that the surface of the lens around the optical axis is concave.
[0151] The optical image capturing system of the present invention could be applied in a dynamic focusing optical image capturing system. It is superior in the correction of aberration and high imaging quality so that it could be allied in lots of fields.
[0152] The optical image capturing system of the present invention could further include a driving module to meet different demands, wherein the driving module could be coupled with the lenses to move the lenses. The driving module could be a voice coil motor (VCM), which is used to move the lens for focusing, or could be an optical image stabilization (OIS) component, which is used to lower the possibility of having the problem of image blurring which is caused by subtle movements of the lens while shooting.
[0153] To meet different requirements, at least one lens among the first lens to the seventh lens of the optical image capturing system of the present invention could be a light filter, which filters out light of wavelength shorter than 500 nm. Such effect could be achieved by coating on at least one surface of the lens, or by using materials capable of filtering out short waves to make the lens.
[0154] To meet different requirements, the image plane of the optical image capturing system in the present invention could be either flat or curved. If the image plane is curved (e.g., a sphere with a radius of curvature), the incidence angle required for focusing light on the image plane could be decreased, which is not only helpful to shorten the length of the optical image capturing system (TTL), but also helpful to increase the relative illuminance.
[0155] We provide several optical embodiments in conjunction with the accompanying drawings for the best understanding. In practice, the optical embodiments of the present invention could be applied to other embodiments.
First Optical Embodiment
[0156] As shown in FIG. 2A and FIG. 2B, wherein a lens group of an optical image capturing system 10 of a first optical embodiment of the present invention is illustrated in FIG. 2A, and FIG. 2B shows curve diagrams of longitudinal spherical aberration, astigmatic field, and optical distortion of the optical image capturing system in the order from left to right of the first optical embodiment. The optical image capturing system 10 of the first optical embodiment includes, along an optical axis from an object side to an image side, a first lens 110, an aperture 100, a second lens 120, a third lens 130, a fourth lens 140, a fifth lens 150, a sixth lens 160, an infrared rays filter 180, an image plane 190, and an image sensor 192.
[0157] The first lens 110 has negative refractive power and is made of plastic. An object-side surface 112 thereof, which faces the object side, is a concave aspheric surface, and an image-side surface 114 thereof, which faces the image side, is a concave aspheric surface. The object-side surface 112 has two inflection points. A profile curve length of the maximum effective radius of the object-side surface 112 of the first lens 110 is denoted by ARS11, and a profile curve length of the maximum effective radius of the image-side surface 114 of the first lens 110 is denoted by ARS12. A profile curve length of half the entrance pupil diameter (HEP) of the object-side surface 112 of the first lens 110 is denoted by ARE11, and a profile curve length of half the entrance pupil diameter (HEP) of the image-side surface 114 of the first lens 110 is denoted by ARE12. A thickness of the first lens 110 on the optical axis is denoted by TP1.
[0158] The first lens satisfies SGI111=-0.0031 mm; |SGI111|/(|SGI111|+TP1)=0.0016, where a displacement on the optical axis from a point on the object-side surface 112 of the first lens 110, through which the optical axis passes, to a point where the inflection point on the object-side surface 112, which is the closest to the optical axis, projects on the optical axis, is denoted by SGI111, and a displacement on the optical axis from a point on the image-side surface 114 of the first lens 110, through which the optical axis passes, to a point where the inflection point on the image-side surface 114, which is the closest to the optical axis, projects on the optical axis is denoted by SGI121.
[0159] The first lens 110 satisfies SGI112=1.3178 mm; |SGI112|/(|SGI112|+TP1)=0.4052, where a displacement on the optical axis from a point on the object-side surface 112 of the first lens 110, through which the optical axis passes, to a point where the inflection point on the object-side surface 112, which is the second closest to the optical axis, projects on the optical axis, is denoted by SGI112, and a displacement on the optical axis from a point on the image-side surface 114 of the first lens 110, through which the optical axis passes, to a point where the inflection point on the image-side surface 114, which is the second closest to the optical axis, projects on the optical axis is denoted by SGI122.
[0160] The first lens 110 satisfies HIF111=0.5557 mm; HIF111/HOI=0.1111, where a displacement perpendicular to the optical axis from a point on the object-side surface 112 of the first lens 110, through which the optical axis passes, to the inflection point, which is the closest to the optical axis is denoted by HIF111, and a displacement perpendicular to the optical axis from a point on the image-side surface 114 of the first lens 110, through which the optical axis passes, to the inflection point, which is the closest to the optical axis is denoted by HIF121.
[0161] The first lens 110 satisfies HIF112=5.3732 mm; HIF112/HOI=1.0746, where a displacement perpendicular to the optical axis from a point on the object-side surface 112 of the first lens 110, through which the optical axis passes, to the inflection point, which is the second closest to the optical axis is denoted by HIF112, and a displacement perpendicular to the optical axis from a point on the image-side surface 114 of the first lens 110, through which the optical axis passes, to the inflection point, which is the second closest to the optical axis is denoted by HIF122.
[0162] The second lens 120 has positive refractive power and is made of plastic. An object-side surface 122 thereof, which faces the object side, is a convex aspheric surface, and an image-side surface 124 thereof, which faces the image side, is a convex aspheric surface. The object-side surface 122 has an inflection point. A profile curve length of the maximum effective radius of the object-side surface 122 of the second lens 120 is denoted by ARS21, and a profile curve length of the maximum effective radius of the image-side surface 124 of the second lens 120 is denoted by ARS22. A profile curve length of half the entrance pupil diameter (HEP) of the object-side surface 122 of the second lens 120 is denoted by ARE21, and a profile curve length of half the entrance pupil diameter (HEP) of the image-side surface 124 of the second lens 120 is denoted by ARE22. A thickness of the second lens 120 on the optical axis is denoted by TP2.
[0163] The second lens 120 satisfies SGI211=0.1069 mm; |SGI211|/(|SGI211|+TP2)=0.0412; SGI221=0 mm; |SGI221|/(|SGI221|+TP2)=0, where a displacement on the optical axis from a point on the object-side surface 122 of the second lens 120, through which the optical axis passes, to a point where the inflection point on the object-side surface 122, which is the closest to the optical axis, projects on the optical axis, is denoted by SGI211, and a displacement on the optical axis from a point on the image-side surface 124 of the second lens 120, through which the optical axis passes, to a point where the inflection point on the image-side surface 124, which is the closest to the optical axis, projects on the optical axis is denoted by SGI221.
[0164] The second lens 120 satisfies HIF211=1.1264 mm; HIF211/HOI=0.2253; HIF221=0 mm; HIF221/HOI=0, where a displacement perpendicular to the optical axis from a point on the object-side surface 122 of the second lens 120, through which the optical axis passes, to the inflection point, which is the closest to the optical axis is denoted by HIF211, and a displacement perpendicular to the optical axis from a point on the image-side surface 124 of the second lens 120, through which the optical axis passes, to the inflection point, which is the closest to the optical axis is denoted by HIF221.
[0165] The third lens 130 has negative refractive power and is made of plastic. An object-side surface 132, which faces the object side, is a concave aspheric surface, and an image-side surface 134, which faces the image side, is a convex aspheric surface. The object-side surface 132 has an inflection point, and the image-side surface 134 has an inflection point. The object-side surface 122 has an inflection point. A profile curve length of the maximum effective radius of the object-side surface 132 of the third lens 130 is denoted by ARS31, and a profile curve length of the maximum effective radius of the image-side surface 134 of the third lens 130 is denoted by ARS32. A profile curve length of half the entrance pupil diameter (HEP) of the object-side surface 132 of the third lens 130 is denoted by ARE31, and a profile curve length of half the entrance pupil diameter (HEP) of the image-side surface 134 of the third lens 130 is denoted by ARE32. A thickness of the third lens 130 on the optical axis is denoted by TP3.
[0166] The third lens 130 satisfies SGI311=-0.3041 mm; |SGI311|/(|SGI311|+TP3)=0.4445; SGI321=-0.1172 mm; |SGI321|/(|SGI321|+TP3)=0.2357, where SGI311 is a displacement on the optical axis from a point on the object-side surface 132 of the third lens 130, through which the optical axis passes, to a point where the inflection point on the object-side surface 132, which is the closest to the optical axis, projects on the optical axis, and SGI321 is a displacement on the optical axis from a point on the image-side surface 134 of the third lens 130, through which the optical axis passes, to a point where the inflection point on the image-side surface 134, which is the closest to the optical axis, projects on the optical axis.
[0167] The third lens 130 satisfies HIF311=1.5907 mm; HIF311/HOI=0.3181; HIF321=1.3380 mm; HIF321/HOI=0.2676, where HIF311 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 132 of the third lens 130, which is the closest to the optical axis, and the optical axis; HIF321 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 134 of the third lens 130, which is the closest to the optical axis, and the optical axis.
[0168] The fourth lens 140 has positive refractive power and is made of plastic. An object-side surface 142, which faces the object side, is a convex aspheric surface, and an image-side surface 144, which faces the image side, is a concave aspheric surface. The object-side surface 142 has two inflection points, and the image-side surface 144 has an inflection point. A profile curve length of the maximum effective radius of the object-side surface 142 of the fourth lens 140 is denoted by ARS41, and a profile curve length of the maximum effective radius of the image-side surface 144 of the fourth lens 140 is denoted by ARS42. A profile curve length of half the entrance pupil diameter (HEP) of the object-side surface 142 of the fourth lens 140 is denoted by ARE41, and a profile curve length of half the entrance pupil diameter (HEP) of the image-side surface 144 of the fourth lens 140 is denoted by ARE42. A thickness of the fourth lens 140 on the optical axis is TP4.
[0169] The fourth lens 140 satisfies SGI411=0.0070 mm; |SGI411|/(|SGI411|+TP4)=0.0056; SGI421=0.0006 mm; |SGI421|/(|SGI421|+TP4)=0.0005, where SGI411 is a displacement on the optical axis from a point on the object-side surface 142 of the fourth lens 140, through which the optical axis passes, to a point where the inflection point on the object-side surface 142, which is the closest to the optical axis, projects on the optical axis, and SGI421 is a displacement on the optical axis from a point on the image-side surface 144 of the fourth lens 140, through which the optical axis passes, to a point where the inflection point on the image-side surface 144, which is the closest to the optical axis, projects on the optical axis.
[0170] The fourth lens 140 satisfies SGI412=-0.2078 mm; |SGI412|/(|SGI412|+TP4)=0.1439, where SGI412 is a displacement on the optical axis from a point on the object-side surface 142 of the fourth lens 140, through which the optical axis passes, to a point where the inflection point on the object-side surface 142, which is the second closest to the optical axis, projects on the optical axis, and SGI422 is a displacement on the optical axis from a point on the image-side surface 144 of the fourth lens 140, through which the optical axis passes, to a point where the inflection point on the image-side surface 144, which is the second closest to the optical axis, projects on the optical axis.
[0171] The fourth lens 140 further satisfies HIF411=0.4706 mm; HIF411/HOI=0.0941; HIF421=0.1721 mm; HIF421/HOI=0.0344, where HIF411 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 142 of the fourth lens 140, which is the closest to the optical axis, and the optical axis; HIF421 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 144 of the fourth lens 140, which is the closest to the optical axis, and the optical axis.
[0172] The fourth lens 140 satisfies HIF412=2.0421 mm; HIF412/HOI=0.4084, where HIF412 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 142 of the fourth lens 140, which is the second closest to the optical axis, and the optical axis; HIF422 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 144 of the fourth lens 140, which is the second closest to the optical axis, and the optical axis.
[0173] The fifth lens 150 has positive refractive power and is made of plastic. An object-side surface 152, which faces the object side, is a convex aspheric surface, and an image-side surface 154, which faces the image side, is a convex aspheric surface. The object-side surface 152 has two inflection points, and the image-side surface 154 has an inflection point. A profile curve length of the maximum effective radius of the object-side surface 152 of the fifth lens 150 is denoted by ARS51, and a profile curve length of the maximum effective radius of the image-side surface 154 of the fifth lens 150 is denoted by ARS52. A profile curve length of half the entrance pupil diameter (HEP) of the object-side surface 152 of the fifth lens 150 is denoted by ARE51, and a profile curve length of half the entrance pupil diameter (HEP) of the image-side surface 154 of the fifth lens 150 is denoted by ARE52. A thickness of the fifth lens 150 on the optical axis is denoted by TP5.
[0174] The fifth lens 150 satisfies SGI511=0.00364 mm; SGI521=-0.63365 mm; |SGI511|/(|SGI511|+TP5)=0.00338; |SGI521|/(|SGI521|+TP5)=0.37154, where SGI511 is a displacement on the optical axis from a point on the object-side surface 152 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the object-side surface 152, which is the closest to the optical axis, projects on the optical axis, and SGI521 is a displacement on the optical axis from a point on the image-side surface 154 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the image-side surface 154, which is the closest to the optical axis, projects on the optical axis.
[0175] The fifth lens 150 satisfies SGI512=-0.32032 mm; |SGI512|/(|SGI512|+TP5)=0.23009, where SGI512 is a displacement on the optical axis from a point on the object-side surface 152 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the object-side surface 152, which is the second closest to the optical axis, projects on the optical axis, and SGI522 is a displacement on the optical axis from a point on the image-side surface 154 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the image-side surface 154, which is the second closest to the optical axis, projects on the optical axis.
[0176] The fifth lens 150 satisfies SGI513=0 mm; SGI523=0 mm; |SGI513|/(|SGI513|+TP5)=0; |SGI523|/(|SGI523|+TP5)=0, where SGI513 is a displacement on the optical axis from a point on the object-side surface 152 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the object-side surface 152, which is the third closest to the optical axis, projects on the optical axis, and SGI523 is a displacement on the optical axis from a point on the image-side surface 154 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the image-side surface 154, which is the third closest to the optical axis, projects on the optical axis.
[0177] The fifth lens 150 satisfies SGI514=0 mm; SGI524=0 mm; |SGI514|/(|SGI514|+TP5)=0; |SGI524|/(|SGI524|+TP5)=0, where SGI514 is a displacement on the optical axis from a point on the object-side surface 152 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the object-side surface 152, which is the fourth closest to the optical axis, projects on the optical axis, and SGI524 is a displacement on the optical axis from a point on the image-side surface 154 of the fifth lens 150, through which the optical axis passes, to a point where the inflection point on the image-side surface 154, which is the fourth closest to the optical axis, projects on the optical axis.
[0178] The fifth lens 150 further satisfies HIF511=0.28212 mm; HIF521=2.13850 mm; HIF511/HOI=0.05642; HIF521/HOI=0.42770, where HIF511 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 152 of the fifth lens 150, which is the closest to the optical axis, and the optical axis; HIF521 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 154 of the fifth lens 150, which is the closest to the optical axis, and the optical axis.
[0179] The fifth lens 150 further satisfies HIF512=2.51384 mm; HIF512/HOI=0.50277, where HIF512 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 152 of the fifth lens 150, which is the second closest to the optical axis, and the optical axis; HIF522 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 154 of the fifth lens 150, which is the second closest to the optical axis, and the optical axis.
[0180] The fifth lens 150 further satisfies HIF513=0 mm; HIF513/HOI=0; HIF523=0 mm; HIF523/HOI=0, where HIF513 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 152 of the fifth lens 150, which is the third closest to the optical axis, and the optical axis; HIF523 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 154 of the fifth lens 150, which is the third closest to the optical axis, and the optical axis.
[0181] The fifth lens 150 further satisfies HIF514=0 mm; HIF514/HOI=0; HIF524=0 mm; HIF524/HOI=0, where HIF514 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 152 of the fifth lens 150, which is the fourth closest to the optical axis, and the optical axis; HIF524 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 154 of the fifth lens 150, which is the fourth closest to the optical axis, and the optical axis.
[0182] The sixth lens 160 has negative refractive power and is made of plastic. An object-side surface 162, which faces the object side, is a concave surface, and an image-side surface 164, which faces the image side, is a concave surface. The object-side surface 162 has two inflection points, and the image-side surface 164 has an inflection point. Whereby, the incident angle of each view field entering the sixth lens 160 could be effectively adjusted to improve aberration. A profile curve length of the maximum effective radius of the object-side surface 162 of the sixth lens 160 is denoted by ARS61, and a profile curve length of the maximum effective radius of the image-side surface 164 of the sixth lens 160 is denoted by ARS62. A profile curve length of half the entrance pupil diameter (HEP) of the object-side surface 162 of the sixth lens 160 is denoted by ARE61, and a profile curve length of half the entrance pupil diameter (HEP) of the image-side surface 164 of the sixth lens 160 is denoted by ARE62. A thickness of the sixth lens 160 on the optical axis is denoted by TP6.
[0183] The sixth lens 160 satisfies SGI611=-0.38558 mm; SGI621=0.12386 mm; |SGI611|/(|SGI611|+TP6)=0.27212; |SGI621|/(|SGI621|+TP6)=0.10722, where SGI611 is a displacement on the optical axis from a point on the object-side surface 162 of the sixth lens 160, through which the optical axis passes, to a point where the inflection point on the object-side surface 162, which is the closest to the optical axis, projects on the optical axis, and SGI621 is a displacement on the optical axis from a point on the image-side surface 164 of the sixth lens 160, through which the optical axis passes, to a point where the inflection point on the image-side surface 164, which is the closest to the optical axis, projects on the optical axis.
[0184] The sixth lens 160 satisfies SGI612=-0.47400 mm; |SGI612|/(|SGI612|+TP6)=0.31488; SGI622=0 mm; |SGI622|/(|SGI622|+TP6)=0, where SGI612 is a displacement on the optical axis from a point on the object-side surface 162 of the sixth lens 160, through which the optical axis passes, to a point where the inflection point on the object-side surface 162, which is the second closest to the optical axis, projects on the optical axis, and SGI622 is a displacement on the optical axis from a point on the image-side surface 164 of the sixth lens 160, through which the optical axis passes, to a point where the inflection point on the image-side surface 164, which is the second closest to the optical axis, projects on the optical axis.
[0185] The sixth lens 160 further satisfies HIF611=2.24283 mm; HIF621=1.07376 mm; HIF611/HOI=0.44857; HIF621/HOI=0.21475, where HIF611 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 162 of the sixth lens 160, which is the closest to the optical axis, and the optical axis; HIF621 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 164 of the sixth lens 160, which is the closest to the optical axis, and the optical axis.
[0186] The sixth lens 160 further satisfies HIF612=2.48895 mm; HIF612/HOI=0.49779, where HIF612 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 162 of the sixth lens 160, which is the second closest to the optical axis, and the optical axis; HIF622 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 164 of the sixth lens 160, which is the second closest to the optical axis, and the optical axis.
[0187] The sixth lens 160 further satisfies HIF613=0 mm; HIF613/HOI=0; HIF623=0 mm; HIF623/HOI=0, where HIF613 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 162 of the sixth lens 160, which is the third closest to the optical axis, and the optical axis; HIF623 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 164 of the sixth lens 160, which is the third closest to the optical axis, and the optical axis.
[0188] The sixth lens 160 further satisfies HIF614=0 mm; HIF614/HOI=0; HIF624=0 mm; HIF624/HOI=0, where HIF614 is a distance perpendicular to the optical axis between the inflection point on the object-side surface 162 of the sixth lens 160, which is the fourth closest to the optical axis, and the optical axis; HIF624 is a distance perpendicular to the optical axis between the inflection point on the image-side surface 164 of the sixth lens 160, which is the fourth closest to the optical axis, and the optical axis.
[0189] The infrared rays filter 180 is made of glass and is disposed between the sixth lens 160 and the image plane 190. The infrared rays filter 180 gives no contribution to the focal length of the optical image capturing system 10.
[0190] The optical image capturing system 10 of the first optical embodiment has the following parameters, which are f=4.075 mm; f/HEP=1.4; HAF=50.001 degrees; and tan(HAF)=1.1918, where f is a focal length of the lens group; HAF is half the maximum field angle; and HEP is an entrance pupil diameter.
[0191] The parameters of the lenses of the first optical embodiment are f1=-7.828 mm; |f/f1|=0.52060; f6=-4.886; and |f1|>f6, where f1 is a focal length of the first lens 110; and f6 is a focal length of the sixth lens 160.
[0192] The first optical embodiment further satisfies |f2|+|f3|+|f4|+|f5|=95.50815; |f1|+|f6|=12.71352 and |f2|+|f3|+|f4|+|f5|>|f1|+|f6|, where f2 is a focal length of the second lens 120, f3 is a focal length of the third lens 130, f4 is a focal length of the fourth lens 140, f5 is a focal length of the fifth lens 150.
[0193] The optical image capturing system 10 of the first optical embodiment further satisfies .SIGMA.PPR=f/f2+f/f4+f/f5=1.63290; .SIGMA.NPR=|f/f1|+|f/f3|+|f/f6|=1.51305; .SIGMA.PPR/|.SIGMA.NPR|=1.07921; |f/f2|=0.69101; |f/f3|=0.15834; |f/f4|=0.06883; |f/f5|=0.87305; and |f/f6|=0.83412, where PPR is a ratio of a focal length f of the optical image capturing system to a focal length fp of each of the lenses with positive refractive power; and NPR is a ratio of a focal length f of the optical image capturing system to a focal length fn of each of lenses with negative refractive power.
[0194] The optical image capturing system 10 of the first optical embodiment further satisfies InTL+BFL=HOS; HOS=19.54120 mm; HOI=5.0 mm; HOS/HOI=3.90824; HOS/f=4.7952; InS=11.685 mm; InTL/HOS=0.9171; and InS/HOS=0.59794, where InTL is an optical axis distance between the object-side surface 112 of the first lens 110 and the image-side surface 164 of the sixth lens 160; HOS is a height of the image capturing system, i.e. an optical axis distance between the object-side surface 112 of the first lens 110 and the image plane 190; InS is an optical axis distance between the aperture 100 and the image plane 190; HOI is half a diagonal of an effective sensing area of the image sensor 192, i.e., the maximum image height; and BFL is a distance between the image-side surface 164 of the sixth lens 160 and the image plane 190.
[0195] The optical image capturing system 10 of the first optical embodiment further satisfies .SIGMA.TP=8.13899 mm; and .SIGMA.TP/InTL=0.52477, where .SIGMA.TP is a sum of the thicknesses of the lenses 110-160 with refractive power. It is helpful for the contrast of image and yield rate of manufacture and provides a suitable back focal length for installation of other elements.
[0196] The optical image capturing system 10 of the first optical embodiment further satisfies |R1/R2|=8.99987, where R1 is a radius of curvature of the object-side surface 112 of the first lens 110, and R2 is a radius of curvature of the image-side surface 114 of the first lens 110. It provides the first lens 110 with a suitable positive refractive power to reduce the increase rate of the spherical aberration.
[0197] The optical image capturing system 10 of the first optical embodiment further satisfies (R11-R12)/(R11+R12)=1.27780, where R11 is a radius of curvature of the object-side surface 162 of the sixth lens 160, and R12 is a radius of curvature of the image-side surface 164 of the sixth lens 160. It may modify the astigmatic field curvature.
[0198] The optical image capturing system 10 of the first optical embodiment further satisfies .SIGMA.PP=f2+f4+f5=69.770 mm; and f5/(f2+f4+f5)=0.067, where .SIGMA.PP is a sum of the focal lengths fp of each lens with positive refractive power. It is helpful to share the positive refractive power of a single lens to other positive lenses to avoid the significant aberration caused by the incident rays.
[0199] The optical image capturing system 10 of the first optical embodiment further satisfies .SIGMA.NP=f1+f3+f6=-38.451 mm; and f6/(f1+f3+f6)=0.127, where .SIGMA.NP is a sum of the focal lengths fn of each lens with negative refractive power. It is helpful to share the negative refractive power of the sixth lens 160 to the other negative lens, which avoids the significant aberration caused by the incident rays.
[0200] The optical image capturing system 10 of the first optical embodiment further satisfies IN12=6.418 mm; IN12/f=1.57491, where IN12 is a distance on the optical axis between the first lens 110 and the second lens 120. It may correct chromatic aberration and improve the performance.
[0201] The optical image capturing system 10 of the first optical embodiment further satisfies IN56=0.025 mm; IN56/f=0.00613, where IN56 is a distance on the optical axis between the fifth lens 150 and the sixth lens 160. It may correct chromatic aberration and improve the performance.
[0202] The optical image capturing system 10 of the first optical embodiment further satisfies TP1=1.934 mm; TP2=2.486 mm; and (TP1+IN12)/TP2=3.36005, where TP1 is a central thickness of the first lens 110 on the optical axis, and TP2 is a central thickness of the second lens 120 on the optical axis. It may control the sensitivity of manufacture of the optical image capturing system and improve the performance.
[0203] The optical image capturing system 10 of the first optical embodiment further satisfies TP5=1.072 mm; TP6=1.031 mm; and (TP6+IN56)/TP5=0.98555, where TP5 is a central thickness of the fifth lens 150 on the optical axis, TP6 is a central thickness of the sixth lens 160 on the optical axis, and IN56 is a distance on the optical axis between the fifth lens 150 and the sixth lens 160. It may control the sensitivity of manufacture of the optical image capturing system and lower the total height of the optical image capturing system.
[0204] The optical image capturing system 10 of the first optical embodiment further satisfies IN34=0.401 mm; IN45=0.025 mm; and TP4/(IN34+TP4+IN45)=0.74376, where TP4 is a central thickness of the fourth lens 140 on the optical axis; IN34 is a distance on the optical axis between the third lens 130 and the fourth lens 140; IN45 is a distance on the optical axis between the fourth lens 140 and the fifth lens 150. It may help to slightly correct the aberration caused by the incident rays and lower the total height of the optical image capturing system.
[0205] The optical image capturing system 10 of the first optical embodiment further satisfies InRS51=-0.34789 mm; InRS52=-0.88185 mm; |InRS51|/TP5=0.32458; and |InRS52|/TP5=0.82276, where InRS51 is a displacement from a point on the object-side surface 152 of the fifth lens 150 passed through by the optical axis to a point on the optical axis where a projection of the maximum effective semi diameter of the object-side surface 152 of the fifth lens 150 ends; InRS52 is a displacement from a point on the image-side surface 154 of the fifth lens 150 passed through by the optical axis to a point on the optical axis where a projection of the maximum effective semi diameter of the image-side surface 154 of the fifth lens 150 ends; and TP5 is a central thickness of the fifth lens 150 on the optical axis. It is helpful for manufacturing and shaping of the lenses and is helpful to reduce the size.
[0206] The optical image capturing system 10 of the first optical embodiment further satisfies HVT51=0.515349 mm; and HVT52=0 mm, where HVT51 is a distance perpendicular to the optical axis between the critical point on the object-side surface 152 of the fifth lens 150 and the optical axis; and HVT52 is a distance perpendicular to the optical axis between the critical point on the image-side surface 154 of the fifth lens 150 and the optical axis.
[0207] The optical image capturing system 10 of the first optical embodiment further satisfies InRS61=-0.58390 mm; InRS62=0.41976 mm; |InRS61|/TP6=0.56616; and |InRS62|/TP6=0.40700, where InRS61 is a displacement from a point on the object-side surface 162 of the sixth lens 160 passed through by the optical axis to a point on the optical axis where a projection of the maximum effective semi diameter of the object-side surface 162 of the sixth lens 160 ends; InRS62 is a displacement from a point on the image-side surface 164 of the sixth lens 160 passed through by the optical axis to a point on the optical axis where a projection of the maximum effective semi diameter of the image-side surface 164 of the sixth lens 160 ends; and TP6 is a central thickness of the sixth lens 160 on the optical axis. It is helpful for manufacturing and shaping of the lenses and is helpful to reduce the size.
[0208] The optical image capturing system 10 of the first optical embodiment satisfies HVT61=0 mm; and HVT62=0 mm, where HVT61 is a distance perpendicular to the optical axis between the critical point on the object-side surface 162 of the sixth lens 160 and the optical axis; and HVT62 is a distance perpendicular to the optical axis between the critical point on the image-side surface 164 of the sixth lens 160 and the optical axis.
[0209] The optical image capturing system 10 of the first optical embodiment satisfies HVT51/HOI=0.1031. It is helpful for correction of the aberration of the peripheral view field of the optical image capturing system.
[0210] The optical image capturing system 10 of the first optical embodiment satisfies HVT51/HOS=0.02634. It is helpful for correction of the aberration of the peripheral view field of the optical image capturing system.
[0211] The second lens 120, the third lens 130, and the sixth lens 160 have negative refractive power. The optical image capturing system 10 of the first optical embodiment further satisfies NA6/NA2.ltoreq.1, where NA2 is an Abbe number of the second lens 120; NA3 is an Abbe number of the third lens 130; NA6 is an Abbe number of the sixth lens 160. It may correct the aberration of the optical image capturing system.
[0212] The optical image capturing system 10 of the first optical embodiment further satisfies |TDT|=2.124%; |ODT|=5.076%, where TDT is TV distortion; and ODT is optical distortion.
[0213] The parameters of the lenses of the first optical embodiment are listed in Table 1 and Table 2.
TABLE-US-00001 TABLE 1 f = 4.075 mm; f/HEP = 1.4; HAF = 50.000 deg Focal Thickness Refractive Abbe length Surface Radius of curvature (mm) (mm) Material index number (mm) 0 Object plane plane 1 1.sup.st lens -40.99625704 1.934 plastic 1.515 56.55 -7.828 2 4.555209289 5.923 3 Aperture plane 0.495 4 2.sup.nd lens 5.333427366 2.486 plastic 1.544 55.96 5.897 5 -6.781659971 0.502 6 3.sup.rd lens -5.697794287 0.380 plastic 1.642 22.46 -25.738 7 -8.883957518 0.401 8 4.sup.th lens 13.19225664 1.236 plastic 1.544 55.96 59.205 9 21.55681832 0.025 10 5.sup.th lens 8.987806345 1.072 plastic 1.515 56.55 4.668 11 -3.158875374 0.025 12 6.sup.th lens -29.46491425 1.031 plastic 1.642 22.46 -4.886 13 3.593484273 2.412 14 Infrared plane 0.200 1.517 64.13 rays filter 15 plane 1.420 16 Image plane plane Reference wavelength (d-line): 555 mm; the position of blocking light: the effective radius of the clear aperture of the first surface is 5.800 mm; the effective diameter of the clear aperture of the third surface is 1.570 mm; the effective diameter of the clear aperture of the fifth surface is 1.950 mm.
TABLE-US-00002 TABLE 2 Coefficients of the aspheric surfaces Surface 1 2 3 4 5 6 k 4.310876E+01 -4.707622E+00 2.616025E+00 2.445397E+00 5.645686E+00 -2.117147E+01 A4 7.054243E-03 1.714312E-02 -8.377541E-03 -1.789549E-02 -3.379055E-03 -1.370959E-02 A6 -5.233264E-04 -1.502232E-04 -1.838068E-03 -3.657520E-03 -1.225453E-03 6.250200E-03 A8 3.077890E-05 -1.359611E-04 1.233332E-03 -1.131622E-03 -5.979572E-03 -5.854426E-03 A10 -1.260650E-06 2.680747E-05 -2.390895E-03 1.390351E-03 4.556449E-03 4.049451E-03 A12 3.319093E-08 -2.017491E-06 1.998555E-03 -4.152857E-04 -1.177175E-03 -1.314592E-03 A14 -5.051600E-10 6.604615E-08 -9.734019E-04 5.487286E-05 1.370522E-04 2.143097E-04 A16 3.380000E-12 -1.301630E-09 2.478373E-04 -2.919339E-06 -5.974015E-06 -1.399894E-05 Surface 8 9 10 11 12 13 k -5.287220E+00 6.200000E+01 -2.114008E+01 -7.699904E+00 -6.155476E+01 -3.120467E-01 A4 -2.937377E-02 -1.359965E-01 -1.263831E-01 -1.927804E-02 -2.492467E-02 -3.521844E-02 A6 2.743532E-03 6.628518E-02 6.965399E-02 2.478376E-03 -1.835360E-03 5.629654E-03 A8 -2.457574E-03 -2.129167E-02 -2.116027E-02 1.438785E-03 3.201343E-03 -5.466925E-04 A10 1.874319E-03 4.396344E-03 3.819371E-03 -7.013749E-04 -8.990757E-04 2.231154E-05 A12 -6.013661E-04 -5.542899E-04 -4.040283E-04 1.253214E-04 1.245343E-04 5.548990E-07 A14 8.792480E-05 3.768879E-05 2.280473E-05 -9.943196E-06 -8.788363E-06 -9.396920E-08 A16 -4.770527E-06 -1.052467E-06 -5.165452E-07 2.898397E-07 2.494302E-07 2.728360E-09
[0214] The figures related to the profile curve lengths obtained based on Table 1 and Table 2 are listed in the following table:
TABLE-US-00003 First optical embodiment (Reference wavelength (d-line): 555 mm) ARE 2(ARE/HEP) ARE/TP ARE 1/2(HEP) value ARE-1/2(HEP) % TP (%) 11 1.455 1.455 -0.00033 99.98% 1.934 75.23% 12 1.455 1.495 0.03957 102.72% 1.934 77.29% 21 1.455 1.465 0.00940 100.65% 2.486 58.93% 22 1.455 1.495 0.03950 102.71% 2.486 60.14% 31 1.455 1.486 0.03045 102.09% 0.380 391.02% 32 1.455 1.464 0.00830 100.57% 0.380 385.19% 41 1.455 1.458 0.00237 100.16% 1.236 117.95% 42 1.455 1.484 0.02825 101.94% 1.236 120.04% 51 1.455 1.462 0.00672 100.46% 1.072 136.42% 52 1.455 1.499 0.04335 102.98% 1.072 139.83% 61 1.455 1.465 0.00964 100.66% 1.031 142.06% 62 1.455 1.469 0.01374 100.94% 1.031 142.45% ARS (ARS/EHD) ARS/TP ARS EHD value ARS-EHD % TP (%) 11 5.800 6.141 0.341 105.88% 1.934 317.51% 12 3.299 4.423 1.125 134.10% 1.934 228.70% 21 1.664 1.674 0.010 100.61% 2.486 67.35% 22 1.950 2.119 0.169 108.65% 2.486 85.23% 31 1.980 2.048 0.069 103.47% 0.380 539.05% 32 2.084 2.101 0.017 100.83% 0.380 552.87% 41 2.247 2.287 0.040 101.80% 1.236 185.05% 42 2.530 2.813 0.284 111.22% 1.236 227.63% 51 2.655 2.690 0.035 101.32% 1.072 250.99% 52 2.764 2.930 0.166 106.00% 1.072 273.40% 61 2.816 2.905 0.089 103.16% 1.031 281.64% 62 3.363 3.391 0.029 100.86% 1.031 328.83%
[0215] The detailed data of FIG. 2B of the first optical embodiment are listed in Table 1, in which the unit of the radius of curvature, thickness, and focal length are millimeter, and surface 0-16 indicates the surfaces of all elements in the system in sequence from the object side to the image side. Table 2 is the list of coefficients of the aspheric surfaces, in which k indicates the taper coefficient in the aspheric curve equation, and A1-A20 indicate the coefficients of aspheric surfaces from the first order to the twentieth order of each aspheric surface. The following optical embodiments have similar diagrams and tables, which are the same as those of the first optical embodiment, so we do not describe it again. The definitions of the mechanism component parameters of the following optical embodiments are the same as those of the first optical embodiment.
Second Optical Embodiment
[0216] As shown in FIG. 3A and FIG. 3B, an optical image capturing system 20 of the second optical embodiment of the present invention includes, along an optical axis from an object side to an image side, a first lens 210, a second lens 220, a third lens 230, an aperture 200, a fourth lens 240, a fifth lens 250, a sixth lens 260, a seventh lens 270, an infrared rays filter 280, an image plane 290, and an image sensor 292.
[0217] The first lens 210 has negative refractive power and is made of glass. An object-side surface 212 thereof, which faces the object side, is a convex spherical surface, and an image-side surface 214 thereof, which faces the image side, is a concave spherical surface.
[0218] The second lens 220 has negative refractive power and is made of glass. An object-side surface 222 thereof, which faces the object side, is a concave spherical surface, and an image-side surface 224 thereof, which faces the image side, is a convex spherical surface.
[0219] The third lens 230 has positive refractive power and is made of glass. An object-side surface 232, which faces the object side, is a convex spherical surface, and an image-side surface 234, which faces the image side, is a convex spherical surface.
[0220] The fourth lens 240 has positive refractive power and is made of glass. An object-side surface 242, which faces the object side, is a convex spherical surface, and an image-side surface 244, which faces the image side, is a convex spherical surface.
[0221] The fifth lens 250 has positive refractive power and is made of glass. An object-side surface 252, which faces the object side, is a convex spherical surface, and an image-side surface 254, which faces the image side, is a convex spherical surface.
[0222] The sixth lens 260 has negative refractive power and is made of glass. An object-side surface 262, which faces the object side, is a concave aspherical surface, and an image-side surface 264, which faces the image side, is a concave aspherical surface. Whereby, the incident angle of each view field entering the sixth lens 260 could be effectively adjusted to improve aberration.
[0223] The seventh lens 270 has negative refractive power and is made of glass. An object-side surface 272, which faces the object side, is a convex surface, and an image-side surface 274, which faces the image side, is a convex surface. It may help to shorten the back focal length to keep small in size, and may reduce an incident angle of the light of an off-axis field of view and correct the aberration of the off-axis field of view.
[0224] The infrared rays filter 280 is made of glass and is disposed between the seventh lens 270 and the image plane 290. The infrared rays filter 280 gives no contribution to the focal length of the optical image capturing system 20.
[0225] The parameters of the lenses of the second optical embodiment are listed in Table 3 and Table 4.
TABLE-US-00004 TABLE 3 f = 4.7601 mm; f/HEP = 2.2; HAF = 95.98 deg Focal Radius of curvature Thickness Refractive Abbe length Surface (mm) (mm) Material index number (mm) 0 Object 1E+18 1E+18 1 1.sup.st lens 47.71478323 4.977 glass 2.001 29.13 -12.647 2 9.527614761 13.737 3 2.sup.nd lens -14.88061107 5.000 glass 2.001 29.13 -99.541 4 -20.42046946 10.837 5 3.sup.rd lens 182.4762997 5.000 glass 1.847 23.78 44.046 6 -46.71963608 13.902 7 Aperture 1E+18 0.850 8 4.sup.th lens 28.60018103 4.095 glass 1.834 37.35 19.369 9 -35.08507586 0.323 10 5.sup.th lens 18.25991342 1.539 glass 1.609 46.44 20.223 11 -36.99028878 0.546 12 6.sup.th lens -18.24574524 5.000 glass 2.002 19.32 -7.668 13 15.33897192 0.215 14 7.sup.th lens 16.13218937 4.933 glass 1.517 64.20 13.620 15 -11.24007 8.664 16 Infrared 1E+18 1.000 BK_7 1.517 64.2 rays filter 17 1E+18 1.007 18 Image 1E+18 -0.007 plane Reference wavelength (d-line): 555 nm
TABLE-US-00005 TABLE 4 Coefficients of the aspheric surfaces Surface 1 2 3 4 5 6 8 k 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A4 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A6 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A8 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A10 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A12 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 Surface 9 10 11 12 13 14 15 k 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A4 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A6 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A8 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A10 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 A12 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00
[0226] An equation of the aspheric surfaces of the second optical embodiment is the same as that of the first optical embodiment, and the definitions are the same as well.
[0227] The exact parameters of the second optical embodiment based on Table 3 and Table 4 are listed in the following table:
TABLE-US-00006 Second optical embodiment (Reference wavelength: 555 nm) |f/f1| |f/f2| |f/f3| |f/f4| |f/f5| |f/f6| 0.3764 0.0478 0.1081 0.2458 0.2354 0.6208 |f/f7| .SIGMA.PPR .SIGMA.NPR .SIGMA.PPR/|.SIGMA.NPR| IN12/f IN67/f 0.3495 1.3510 0.6327 2.1352 2.8858 0.0451 |f1/f2| |f2/f3| (TP1 + IN12)/ TP2 (TP7 + IN67)/ TP6 0.1271 2.2599 3.7428 1.0296 HOS InTL HOS/HOI InS/HOS ODT % TDT % 81.6178 70.9539 13.6030 0.3451 -113.2790 84.4806 HVT11 HVT12 HVT21 HVT22 HVT31 HVT32 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 HVT61 HVT62 HVT71 HVT72 HVT72/HOI HVT72/HOS 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 PhiA HOI 11.962 6 mm mm InTL/HOS 0.8693 PSTA PLTA NSTA NLTA SSTA SLTA 0.060 -0.005 mm 0.016 mm 0.006 mm 0.020 mm -0.008 mm mm
[0228] The figures related to the profile curve lengths obtained based on Table 3 and Table 4 are listed in the following table:
TABLE-US-00007 Second optical embodiment (Reference wavelength: 555 nm) ARE ARE- 2(ARE/HEP) ARE/TP ARE 1/2(HEP) value 1/2(HEP) % TP (%) 11 1.082 1.081 -0.00075 99.93% 4.977 21.72% 12 1.082 1.083 0.00149 100.14% 4.977 21.77% 21 1.082 1.082 0.00011 100.01% 5.000 21.64% 22 1.082 1.082 -0.00034 99.97% 5.000 21.63% 31 1.082 1.081 -0.00084 99.92% 5.000 21.62% 32 1.082 1.081 -0.00075 99.93% 5.000 21.62% 41 1.082 1.081 -0.00059 99.95% 4.095 26.41% 42 1.082 1.081 -0.00067 99.94% 4.095 26.40% 51 1.082 1.082 -0.00021 99.98% 1.539 70.28% 52 1.082 1.081 -0.00069 99.94% 1.539 70.25% 61 1.082 1.082 -0.00021 99.98% 5.000 21.63% 62 1.082 1.082 0.00005 100.00% 5.000 21.64% 71 1.082 1.082 -0.00003 100.00% 4.933 21.93% 72 1.082 1.083 0.00083 100.08% 4.933 21.95% ARS ARS- (ARS/EHD) TP ARS/TP ARS EHD value EHD % (%) 11 20.767 21.486 0.719 103.46% 4.977 431.68% 12 9.412 13.474 4.062 143.16% 4.977 270.71% 21 8.636 9.212 0.577 106.68% 5.000 184.25% 22 9.838 10.264 0.426 104.33% 5.000 205.27% 31 8.770 8.772 0.003 100.03% 5.000 175.45% 32 8.511 8.558 0.047 100.55% 5.000 171.16% 41 4.600 4.619 0.019 100.42% 4.095 112.80% 42 4.965 4.981 0.016 100.32% 4.095 121.64% 51 5.075 5.143 0.067 101.33% 1.539 334.15% 52 5.047 5.062 0.015 100.30% 1.539 328.89% 61 5.011 5.075 0.064 101.28% 5.000 101.50% 62 5.373 5.489 0.116 102.16% 5.000 109.79% 71 5.513 5.625 0.112 102.04% 4.933 114.03% 72 5.981 6.307 0.326 105.44% 4.933 127.84%
[0229] The results of the equations of the second optical embodiment based on Table 3 and Table 4 are listed in the following table:
TABLE-US-00008 Values related to the inflection points of the second optical embodiment (Reference wavelength: 555 nm) HIF111 0 HIF111/ 0 SGI111 0 |SGI111|/ 0 HOI (|SGI111| + TP1)
Third Optical Embodiment
[0230] As shown in FIG. 4A and FIG. 4B, an optical image capturing system 30 of the third optical embodiment of the present invention includes, along an optical axis from an object side to an image side, a first lens 310, a second lens 320, a third lens 330, an aperture 300, a fourth lens 340, a fifth lens 350, a sixth lens 360, a seventh lens 370, an infrared rays filter 380, an image plane 390, and an image sensor 392.
[0231] The first lens 310 has negative refractive power and is made of glass. An object-side surface 312 thereof, which faces the object side, is a convex spherical surface, and an image-side surface 314 thereof, which faces the image side, is a concave spherical surface.
[0232] The second lens 320 has negative refractive power and is made of glass. An object-side surface 322 thereof, which faces the object side, is a concave spherical surface, and an image-side surface 324 thereof, which faces the image side, is a convex spherical surface.
[0233] The third lens 330 has positive refractive power and is made of plastic. An object-side surface 332 thereof, which faces the object side, is a convex aspheric surface, and an image-side surface 334 thereof, which faces the image side, is a convex aspheric surface. The image-side surface 334 has an inflection point.
[0234] The fourth lens 340 has negative refractive power and is made of plastic. An object-side surface 342, which faces the object side, is a concave aspheric surface, and an image-side surface 344, which faces the image side, is a concave aspheric surface. The image-side surface 344 has an inflection point.
[0235] The fifth lens 350 has positive refractive power and is made of plastic. An object-side surface 352, which faces the object side, is a convex aspheric surface, and an image-side surface 354, which faces the image side, is a convex aspheric surface.
[0236] The sixth lens 360 has negative refractive power and is made of plastic. An object-side surface 362, which faces the object side, is a convex aspheric surface, and an image-side surface 364, which faces the image side, is a concave aspheric surface. The object-side surface 362 has an inflection point, and the image-side surface 364 has an inflection point. It may help to shorten the back focal length to keep small in size. Whereby, the incident angle of each view field entering the sixth lens 360 could be effectively adjusted to improve aberration.
[0237] The infrared rays filter 380 is made of glass and is disposed between the sixth lens 360 and the image plane 390. The infrared rays filter 390 gives no contribution to the focal length of the optical image capturing system 30.
[0238] The parameters of the lenses of the third optical embodiment 30 are listed in Table 5 and Table 6.
TABLE-US-00009 TABLE 5 f = 2.808 mm; f/HEP = 1.6; HAF = 100 deg Radius of curvature Thickness Refractive Abbe Focal length Surface (mm) (mm) Material index number (mm) 0 Object 1E+18 1E+18 1 1.sup.st lens 71.398124 7.214 glass 1.702 41.15 -11.765 2 7.117272355 5.788 3 2.sup.nd lens -13.29213699 10.000 glass 2.003 19.32 -4537.460 4 -18.37509887 7.005 5 3.sup.rd lens 5.039114804 1.398 plastic 1.514 56.80 7.553 6 -15.53136631 -0.140 7 Aperture 1E+18 2.378 8 4.sup.th lens -18.68613609 0.577 plastic 1.661 20.40 -4.978 9 4.086545927 0.141 10 5.sup.th lens 4.927609282 2.974 plastic 1.565 58.00 4.709 11 -4.551946605 1.389 12 6.sup.th lens 9.184876531 1.916 plastic 1.514 56.80 -23.405 13 4.845500046 0.800 14 Infrared 1E+18 0.500 BK_7 1.517 64.13 rays filter 15 1E+18 0.371 16 Image 1E+18 0.005 plane Reference wavelength (d-line): 555 nm; the position of blocking light: none.
TABLE-US-00010 TABLE 6 Coefficients of the aspheric surfaces Surface 1 2 3 4 5 6 k 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 1.318519E-01 3.120384E+00 A4 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 6.405246E-05 2.103942E-03 A6 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 2.278341E-05 -1.050629E-04 A8 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 -3.672908E-06 6.168906E-06 A10 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 3.748457E-07 -1.224682E-07 Surface 8 9 10 11 12 13 k -1.494442E+01 2.744228E-02 -7.864013E+00 -2.263702E+00 -4.206923E+01 -7.030803E+00 A4 -1.598286E-03 -7.291825E-03 1.405243E-04 -3.919567E-03 -1.679499E-03 -2.640099E-03 A6 -9.177115E-04 9.730714E-05 1.837602E-04 2.683449E-04 -3.518520E-04 -4.507651E-05 A8 1.011405E-04 1.101816E-06 -2.173368E-05 -1.229452E-05 5.047353E-05 -2.600391E-05 A10 -4.919835E-06 -6.849076E-07 7.328496E-07 4.222621E-07 -3.851055E-06 1.161811E-06
[0239] An equation of the aspheric surfaces of the third optical embodiment is the same as that of the first optical embodiment, and the definitions are the same as well.
[0240] The exact parameters of the third optical embodiment based on Table 5 and Table 6 are listed in the following table:
TABLE-US-00011 Third optical embodiment (Reference wavelength: 555 nm) |f/f1| |f/f2| |f/f3| |f/f4| |f/f5| |f/f6| 0.23865 0.00062 0.37172 0.56396 0.59621 0.11996 .SIGMA.PPR .SIGMA.NPR .SIGMA.PPR/|.SIGMA.NPR| IN12/f IN56/f TP4/(IN34 + TP4 + IN45) 1.77054 0.12058 14.68400 2.06169 0.49464 0.19512 |f1/f2| |f2/f3| (TP1 + IN12)/ TP2 (TP6 + IN56)/ TP5 0.00259 600.74778 1.30023 1.11131 HOS InTL HOS/HOI InS/HOS ODT % TDT % 42.31580 40.63970 10.57895 0.26115 -122.32700 93.33510 HVT51 HVT52 HVT61 HVT62 HVT62/HOI HVT62/HOS 0 0 2.22299 2.60561 0.65140 0.06158 TP2/TP3 TP3/TP4 InRS61 InRS62 |InRS61|/TP6 |InRS62|/TP6 7.15374 2.42321 -0.20807 -0.24978 0.10861 0.13038 PhiA HOI 6.150 mm 4 mm InTL/HOS 0.9604 PSTA PLTA NSTA NLTA SSTA SLTA 0.014 mm 0.002 mm -0.003 mm -0.002 mm 0.011 mm -0.001 mm
[0241] The figures related to the profile curve lengths obtained based on Table 5 and Table 6 are listed in the following table:
TABLE-US-00012 Third optical embodiment (Reference wavelength: 555 nm) 1/2 ARE ARE - 2(ARE/ ARE/TP ARE (HEP) value 1/2(HEP) HEP) % TP (%) 11 0.877 0.877 -0.00036 99.96% 7.214 12.16% 12 0.877 0.879 0.00186 100.21% 7.214 12.19% 21 0.877 0.878 0.00026 100.03% 10.000 8.78% 22 0.877 0.877 -0.00004 100.00% 10.000 8.77% 31 0.877 0.882 0.00413 100.47% 1.398 63.06% 32 0.877 0.877 0.00004 100.00% 1.398 62.77% 41 0.877 0.877 -0.00001 100.00% 0.577 152.09% 42 0.877 0.883 0.00579 100.66% 0.577 153.10% 51 0.877 0.881 0.00373 100.43% 2.974 29.63% 52 0.877 0.883 0.00521 100.59% 2.974 29.68% 61 0.877 0.878 0.00064 100.07% 1.916 45.83% 62 0.877 0.881 0.00368 100.42% 1.916 45.99% ARS ARS - (ARS/ ARS/TP ARS EHD value EHD EHD)% TP (%) 11 17.443 17.620 0.178 101.02% 7.214 244.25% 12 6.428 8.019 1.592 124.76% 7.214 111.16% 21 6.318 6.584 0.266 104.20% 10.000 65.84% 22 6.340 6.472 0.132 102.08% 10.000 64.72% 31 2.699 2.857 0.158 105.84% 1.398 204.38% 32 2.476 2.481 0.005 100.18% 1.398 177.46% 41 2.601 2.652 0.051 101.96% 0.577 459.78% 42 3.006 3.119 0.113 103.75% 0.577 540.61% 51 3.075 3.171 0.096 103.13% 2.974 106.65% 52 3.317 3.624 0.307 109.24% 2.974 121.88% 61 3.331 3.427 0.095 102.86% 1.916 178.88% 62 3.944 4.160 0.215 105.46% 1.916 217.14%
[0242] The results of the equations of the third optical embodiment based on Table 5 and Table 6 are listed in the following table:
TABLE-US-00013 Values related to the inflection points of the third optical embodiment (Reference wavelength: 555 nm) HIF321 2.0367 HIF321/HOI 0.5092 SGI321 -0.1056 |SGI321|/(|SGI321| + TP3) 0.0702 HIF421 2.4635 HIF421/HOI 0.6159 SGI421 0.5780 |SGI421|/(|SGI421| + TP4) 0.5005 HIF611 1.2364 HIF611/HOI 0.3091 SGI611 0.0668 |SGI611|/(|SGI611| + TP6) 0.0337 HIF621 1.5488 HIF621/HOI 0.3872 SGI621 0.2014 |SGI621|/(|SGI621| + TP6) 0.0951
Fourth Optical Embodiment
[0243] As shown in FIG. 5A and FIG. 5B, an optical image capturing system 40 of the fourth optical embodiment of the present invention includes, along an optical axis from an object side to an image side, a first lens 410, a second lens 420, a third lens 430, an aperture 400, a fourth lens 440, a fifth lens 450, an infrared rays filter 480, an image plane 490, and an image sensor 492.
[0244] The first lens 410 has negative refractive power and is made of glass. An object-side surface 412 thereof, which faces the object side, is a convex spherical surface, and an image-side surface 414 thereof, which faces the image side, is a concave spherical surface.
[0245] The second lens 420 has negative refractive power and is made of plastic. An object-side surface 422 thereof, which faces the object side, is a concave aspheric surface, and an image-side surface 424 thereof, which faces the image side, is a concave aspheric surface. The object-side surface 422 has an inflection point.
[0246] The third lens 430 has positive refractive power and is made of plastic. An object-side surface 432 thereof, which faces the object side, is a convex aspheric surface, and an image-side surface 434 thereof, which faces the image side, is a convex aspheric surface. The object-side surface 432 has an inflection point.
[0247] The fourth lens 440 has positive refractive power and is made of plastic. An object-side surface 442, which faces the object side, is a convex aspheric surface, and an image-side surface 444, which faces the image side, is a convex aspheric surface. The object-side surface 442 has an inflection point.
[0248] The fifth lens 450 has negative refractive power and is made of plastic. An object-side surface 452, which faces the object side, is a concave aspheric surface, and an image-side surface 454, which faces the image side, is a concave aspheric surface. The object-side surface 452 has two inflection points. It may help to shorten the back focal length to keep small in size.
[0249] The infrared rays filter 480 is made of glass and is disposed between the fifth lens 450 and the image plane 490. The infrared rays filter 480 gives no contribution to the focal length of the optical image capturing system 40.
[0250] The parameters of the lenses of the fourth optical embodiment are listed in Table 7 and Table 8.
TABLE-US-00014 TABLE 7 f = 2.7883 mm; f/HEP = 1.8; HAF = 101 deg Radius of curvature Thickness Refractive Abbe Focal length Surface (mm) (mm) Material index number (mm) 0 Object 1E+18 1E+18 1 1.sup.st lens 76.84219 6.117399 glass 1.497 81.61 -31.322 2 12.62555 5.924382 3 2.sup.nd lens -37.0327 3.429817 plastic 1.565 54.5 -8.70843 4 5.88556 5.305191 5 3.sup.rd lens 17.99395 14.79391 6 -5.76903 -0.4855 plastic 1.565 58 9.94787 7 Aperture 1E+18 0.535498 8 4.sup.th lens 8.19404 4.011739 plastic 1.565 58 5.24898 9 -3.84363 0.050366 10 5.sup.th lens -4.34991 2.088275 plastic 1.661 20.4 -4.97515 11 16.6609 0.6 12 Infrared 1E+18 0.5 BK_7 1.517 64.13 rays filter 13 1E+18 3.254927 14 Image plane 1E+18 -0.00013 Reference wavelength (d-line): 555 nm.
TABLE-US-00015 TABLE 8 Coefficients of the aspheric surfaces Surface 1 2 3 4 5 k 0.000000E+00 0.000000E+00 0.131249 -0.069541 -0.324555 A4 0.000000E+00 0.000000E+00 3.99823E-05 -8.55712E-04 -9.07093E-04 A6 0.000000E+00 0.000000E+00 9.03636E-08 -1.96175E-06 -1.02465E-05 A8 0.000000E+00 0.000000E+00 1.91025E-09 -1.39344E-08 -8.18157E-08 A10 0.000000E+00 0.000000E+00 -1.18567E-11 -4.17090E-09 -2.42621E-09 A12 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 Surface 6 8 9 10 11 k 0.009216 -0.292346 -0.18604 -6.17195 27.541383 A4 8.80963E-04 -1.02138E-03 4.33629E-03 1.58379E-03 7.56932E-03 A6 3.14497E-05 -1.18559E-04 -2.91588E-04 -1.81549E-04 -7.83858E-04 A8 -3.15863E-06 1.34404E-05 9.11419E-06 -1.18213E-05 4.79120E-05 A10 1.44613E-07 -2.80681E-06 1.28365E-07 1.92716E-06 -1.73591E-06 A22 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00
[0251] An equation of the aspheric surfaces of the fourth optical embodiment is the same as that of the first optical embodiment, and the definitions are the same as well.
[0252] The exact parameters of the fourth optical embodiment based on Table 7 and Table 8 are listed in the following table:
TABLE-US-00016 Fourth optical embodiment (Reference wavelength: 555 nm) |f/f1| |f/f2| |f/f3| |f/f4| |f/f5| |f1/f2| 0.08902 0.32019 0.28029 0.53121 0.56045 3.59674 .SIGMA.PPR .SIGMA.NPR .SIGMA.PPR/ IN12/f IN45/f |f2/f3| |.SIGMA.NPR| 1.4118 0.3693 3.8229 2.1247 0.0181 0.8754 TP3/(IN23 + TP3 + IN34) (TP1 + IN12)/TP2 (TP5 + IN45)/TP4 0.73422 3.51091 0.53309 HOS InTL HOS/HOI InS/HOS ODT % TDT % 46.12590 41.77110 11.53148 0.23936 -125.266 99.1671 HVT41 HVT42 HVT51 HVT52 HVT52/ HVT52/ HOI HOS 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 TP2/TP3 TP3/TP4 InRS51 InRS52 |InRS51|/ |InRS52|/ TP5 TP5 0.23184 3.68765 -0.679265 0.5369 0.32528 0.25710 PhiA HOI 5.598 mm 4 mm InTL/HOS 0.9056 PSTA PLTA NSTA NLTA SSTA SLTA -0.011 mm 0.005 mm -0.010 mm -0.003 0.005 -0.00026 mm mm mm
[0253] The figures related to the profile curve lengths obtained based on Table 7 and Table 8 are listed in the following table:
TABLE-US-00017 Fourth optical embodiment (Reference wavelength: 555 nm) 1/2 ARE ARE - 2(ARE/HEP) ARE/TP ARE (HEP) value 1/2(HEP) % TP (%) 11 0.775 0.774 -0.00052 99.93% 6.117 12.65% 12 0.775 0.774 -0.00005 99.99% 6.117 12.66% 21 0.775 0.774 -0.00048 99.94% 3.430 22.57% 22 0.775 0.776 0.00168 100.22% 3.430 22.63% 31 0.775 0.774 -0.00031 99.96% 14.794 5.23% 32 0.775 0.776 0.00177 100.23% 14.794 5.25% 41 0.775 0.775 0.00059 100.08% 4.012 19.32% 42 0.775 0.779 0.00453 100.59% 4.012 19.42% 51 0.775 0.778 0.00311 100.40% 2.088 37.24% 52 0.775 0.774 -0.00014 99.98% 2.088 37.08% ARS ARS - (ARS/EHD) ARS/TP ARS EHD value EHD % TP (%) 11 23.038 23.397 0.359 101.56% 6.117 382.46% 12 10.140 11.772 1.632 116.10% 6.117 192.44% 21 10.138 10.178 0.039 100.39% 3.430 296.74% 22 5.537 6.337 0.800 114.44% 3.430 184.76% 31 4.490 4.502 0.012 100.27% 14.794 30.43% 32 2.544 2.620 0.076 102.97% 14.794 17.71% 41 2.735 2.759 0.024 100.89% 4.012 68.77% 42 3.123 3.449 0.326 110.43% 4.012 85.97% 51 2.934 3.023 0.089 103.04% 2.088 144.74% 52 2.799 2.883 0.084 103.00% 2.088 138.08%
[0254] The results of the equations of the fourth optical embodiment based on Table 7 and Table 8 are listed in the following table:
TABLE-US-00018 Values related to the inflection points of the fourth optical embodiment (Reference wavelength: 555 nm) HIF211 6.3902 HIF211/HOI 1.5976 SGI211 -0.4793 |SGI211|/(|SGI211| + TP2) 0.1226 HIF311 2.1324 HIF311/HOI 0.5331 SGI311 0.1069 |SGI311|/(|SGI311| + TP3) 0.0072 HIF411 2.0278 HIF411/HOI 0.5070 SGI411 0.2287 |SGI411|/(|SGI411| + TP4) 0.0539 HIF511 2.6253 HIF511/HOI 0.6563 SGI511 -0.5681 |SGI511|/(|SGI511| + TP5) 0.2139 HIF512 2.1521 HIF512/HOI 0.5380 SGI512 -0.8314 |SGI512|/(|SGI512| + TP5) 0.2848
Fifth Optical Embodiment
[0255] As shown in FIG. 6A and FIG. 6B, an optical image capturing system 50 of the fifth optical embodiment of the present invention includes, along an optical axis from an object side to an image side, an aperture 500, a first lens 510, a second lens 520, a third lens 530, a fourth lens 540, an infrared rays filter 570, an image plane 580, and an image sensor 590.
[0256] The first lens 510 has positive refractive power and is made of plastic. An object-side surface 512, which faces the object side, is a convex aspheric surface, and an image-side surface 514, which faces the image side, is a convex aspheric surface. The object-side surface 512 has an inflection point.
[0257] The second lens 520 has negative refractive power and is made of plastic. An object-side surface 522 thereof, which faces the object side, is a convex aspheric surface, and an image-side surface 524 thereof, which faces the image side, is a concave aspheric surface. The object-side surface 522 has two inflection points, and the image-side surface 524 has an inflection point.
[0258] The third lens 530 has positive refractive power and is made of plastic. An object-side surface 532, which faces the object side, is a concave aspheric surface, and an image-side surface 534, which faces the image side, is a convex aspheric surface. The object-side surface 532 has three inflection points, and the image-side surface 534 has an inflection point.
[0259] The fourth lens 540 has negative refractive power and is made of plastic. An object-side surface 542, which faces the object side, is a concave aspheric surface, and an image-side surface 544, which faces the image side, is a concave aspheric surface. The object-side surface 542 has two inflection points, and the image-side surface 544 has an inflection point.
[0260] The infrared rays filter 570 is made of glass and is disposed between the fourth lens 540 and the image plane 580. The infrared rays filter 570 gives no contribution to the focal length of the optical image capturing system 50.
[0261] The parameters of the lenses of the fifth optical embodiment are listed in Table 9 and Table 10.
TABLE-US-00019 TABLE 9 f = 1.04102 mm; f/HEP = 1.4; HAF = 44.0346 deg Focal Thickness Refractive Abbe length Surface Radius of curvature (mm) (mm) Material index number (mm) 0 Object 1E+18 600 1 Aperture 1E+18 -0.020 2 1.sup.st lens 0.890166851 0.210 plastic 1.545 55.96 1.587 3 -29.11040115 -0.010 4 1E+18 0.116 5 2.sup.nd lens 10.67765398 0.170 plastic 1.642 22.46 -14.569 6 4.977771922 0.049 7 3.sup.rd lens -1.191436932 0.349 plastic 1.545 55.96 0.510 8 -0.248990674 0.030 9 4.sup.th lens -38.08537212 0.176 plastic 1.642 22.46 -0.569 10 0.372574476 0.152 11 1E+18 0.210 BK_7 1.517 64.13 1E+18 12 1E+18 0.185 1E+18 13 1E+18 0.005 1E+18 Reference wavelength (d-line): 555 nm; the position of blocking light: the effective radius of the clear aperture of the fourth surface is 0.360 mm.
TABLE-US-00020 TABLE 10 Coefficients of the aspheric surfaces Surface 2 3 5 6 7 8 9 10 k -1.106629E+00 2.994179E-07 -7.788754E+01 -3.440335E+01 -8.522097E-01 -4.735945E+00 -2.277155E+01 -8.039778E-01 A4 8.291155E-01 -6.401113E-01 -4.958114E+00 -1.875957E+00 -4.878227E-01 -2.490377E+00 1.672704E+01 -7.613206E+00 A6 -2.398799E+01 -1.265726E+01 1.299769E+02 8.568480E+01 1.291242E+02 1.524149E+02 -3.260722E+02 3.374046E+01 A8 1.825378E+02 8.457286E+01 -2.736977E+03 -1.279044E+03 -1.979689E+03 -4.841033E+03 3.373231E+03 -1.368453E+02 A10 -6.211133E+02 -2.157875E+02 2.908537E+04 8.661312E+03 1.456076E+04 8.053747E+04 -2.177676E+04 4.049486E+02 A12 -4.719066E+02 -6.203600E+02 -1.499597E+05 -2.875274E+04 -5.975920E+04 -7.936887E+05 8.951687E+04 -9.711797E+02 A14 0.000000E+00 0.000000E+00 2.992026E+05 3.764871E+04 1.351676E+05 4.811528E+06 -2.363737E+05 1.942574E+03 A16 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 -1.329001E+05 -1.762293E+07 3.983151E+05 -2.876356E+03 A18 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 3.579891E+07 -4.090689E+05 2.562386E+03 A20 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 0.000000E+00 -3.094006E+07 2.056724E+05 -9.943657E+02
[0262] An equation of the aspheric surfaces of the fifth optical embodiment is the same as that of the first optical embodiment, and the definitions are the same as well.
[0263] The exact parameters of the fifth optical embodiment based on Table 9 and Table 10 are listed in the following table:
TABLE-US-00021 Fifth optical embodiment (Reference wavelength: 555 nm) InRS41 InRS42 HVT41 HVT42 ODT % TDT % -0.07431 0.00475 0.00000 0.53450 2.09403 0.84704 |f/f1| |f/f2| |f/f3| |f/f4| |f1/f2| |f2/f3| 0.65616 0.07145 2.04129 1.83056 0.10890 28.56826 .SIGMA.PPR .SIGMA.NPR .SIGMA.PPR/|.SIGMA.NPR| .SIGMA.PP .SIGMA.NP f1/.SIGMA.PP 2.11274 2.48672 0.84961 -14.05932 1.01785 1.03627 f4/.SIGMA.NP IN12/f IN23/f IN34/f TP3/f TP4/f 1.55872 0.10215 0.04697 0.02882 0.33567 0.16952 InTL HOS HOS/HOI InS/HOS InTL/HOS .SIGMA.TP/InTL 1.09131 1.64329 1.59853 0.98783 0.66410 0.83025 (TP1 + IN12)/TP2 (TP4 + IN34)/TP3 TP1/TP2 TP3/TP4 IN23/(TP2 + IN23 + TP3) 1.86168 0.59088 1.23615 1.98009 0.08604 |InRS41|/TP4 |InRS42|/TP4 HVT42/HOI HVT42/ HOS InTL/HOS 0.4211 0.0269 0.5199 0.3253 0.6641 PhiA HOI 1.596 mm 1.028 mm PSTA PLTA NSTA NLTA SSTA SLTA -0.029 mm -0.023 mm -0.011 mm -0.024 mm 0.010 mm 0.011 mm
[0264] The results of the equations of the fifth optical embodiment based on Table 9 and Table 10 are listed in the following table:
TABLE-US-00022 Values related to the inflection points of the fifth optical embodiment (Reference wavelength: 555 nm) HIF111 0.28454 HIF111/HOI 0.27679 SGI111 0.04361 |SGI111|/(|SGI111| + TP1) 0.17184 HIF211 0.04198 HIF211/HOI 0.04083 SGI211 0.00007 |SGI211|/(|SGI211| + TP2) 0.00040 HIF212 0.37903 HIF212/HOI 0.36871 SGI212 -0.03682 |SGI212|/(|SGI212| + TP2) 0.17801 HIF221 0.25058 HIF221/HOI 0.24376 SGI221 0.00695 |SGI221|/(|SGI221| + TP2) 0.03927 HIF311 0.14881 HIF311/HOI 0.14476 SGI311 -0.00854 |SGI311|/(|SGI311| + TP3) 0.02386 HIF312 0.31992 HIF312/HOI 0.31120 SGI312 -0.01783 |SGI312|/(|SGI312| + TP3) 0.04855 HIF313 0.32956 HIF313/HOI 0.32058 SGI313 -0.01801 |SGI313|/(|SGI313| + TP3) 0.04902 HIF321 0.36943 HIF321/HOI 0.35937 SGI321 -0.14878 |SGI321|/(|SGI321| + TP3) 0.29862 HIF411 0.01147 HIF411/HOI 0.01116 SGI411 -0.00000 |SGI411|/(|SGI411| + TP4) 0.00001 HIF412 0.22405 HIF412/HOI 0.21795 SGI412 0.01598 |SGI412|/(|SGI412| + TP4) 0.08304 HIF421 0.24105 HIF421/HOI 0.23448 SGI421 0.05924 |SGI421|/(|SGI421| + TP4) 0.25131
[0265] The figures related to the profile curve lengths obtained based on Table 9 and Table 10 are listed in the following table:
TABLE-US-00023 Fifth optical embodiment (Reference wavelength: 555 nm) 1/2 ARE ARE - 2(ARE/HEP) ARE/TP ARE (HEP) value 1/2(HEP) % TP (%) 11 0.368 0.374 0.00578 101.57% 0.210 178.10% 12 0.366 0.368 0.00240 100.66% 0.210 175.11% 21 0.372 0.375 0.00267 100.72% 0.170 220.31% 22 0.372 0.371 -0.00060 99.84% 0.170 218.39% 31 0.372 0.372 -0.00023 99.94% 0.349 106.35% 32 0.372 0.404 0.03219 108.66% 0.349 115.63% 41 0.372 0.373 0.00112 100.30% 0.176 211.35% 42 0.372 0.387 0.01533 104.12% 0.176 219.40% ARS ARS - (ARS/EHD) ARS/TP ARS EHD value EHD % TP (%) 11 0.368 0.374 0.00578 101.57% 0.210 178.10% 12 0.366 0.368 0.00240 100.66% 0.210 175.11% 21 0.387 0.391 0.00383 100.99% 0.170 229.73% 22 0.458 0.460 0.00202 100.44% 0.170 270.73% 31 0.476 0.478 0.00161 100.34% 0.349 136.76% 32 0.494 0.538 0.04435 108.98% 0.349 154.02% 41 0.585 0.624 0.03890 106.65% 0.176 353.34% 42 0.798 0.866 0.06775 108.49% 0.176 490.68%
Sixth Optical Embodiment
[0266] As shown in FIG. 7A and FIG. 7B, an optical image capturing system 60 of the sixth optical embodiment of the present invention includes, along an optical axis from an object side to an image side, a first lens 610, an aperture 600, a second lens 620, a third lens 630, an infrared rays filter 670, an image plane 680, and an image sensor 690.
[0267] The first lens 610 has positive refractive power and is made of plastic. An object-side surface 612, which faces the object side, is a convex aspheric surface, and an image-side surface 614, which faces the image side, is a concave aspheric surface.
[0268] The second lens 620 has negative refractive power and is made of plastic. An object-side surface 622 thereof, which faces the object side, is a concave aspheric surface, and an image-side surface 624 thereof, which faces the image side, is a convex aspheric surface. The image-side surface 624 has an inflection point.
[0269] The third lens 630 has positive refractive power and is made of plastic. An object-side surface 632, which faces the object side, is a convex aspheric surface, and an image-side surface 634, which faces the image side, is a concave aspheric surface. The object-side surface 632 has two inflection points, and the image-side surface 634 has an inflection point.
[0270] The infrared rays filter 670 is made of glass and is disposed between the third lens 630 and the image plane 680. The infrared rays filter 670 gives no contribution to the focal length of the optical image capturing system 60.
[0271] The parameters of the lenses of the sixth optical embodiment are listed in Table 11 and Table 12.
TABLE-US-00024 TABLE 11 f = 2.41135 mm; f/HEP = 2.22; HAF = 36 deg Focal Radius of curvature Thickness Refractive Abbe length Surface (mm) (mm) Material index number (mm) 0 Object 1E+18 600 1 1.sup.st lens 0.840352226 0.468 plastic 1.535 56.27 2.232 2 2.271975602 0.148 3 Aperture 1E+18 0.277 4 2.sup.nd lens -1.157324239 0.349 plastic 1.642 22.46 -5.221 5 -1.968404008 0.221 6 3.sup.rd lens 1.151874235 0.559 plastic 1.544 56.09 7.360 7 1.338105159 0.123 8 Infrared 1E+18 0.210 BK7 1.517 64.13 rays filter 9 1E+18 0.547 10 Image plane 1E+18 0.000 Reference wavelength (d-line): 555 nm; the position of blocking light: the effective radius of the clear aperture of the first surface is 0.640 mm.
TABLE-US-00025 TABLE 12 Coefficients of the aspheric surfaces Surface 1 2 4 5 6 7 k -2.019203E-01 1.528275E+01 3.743939E+00 -1.207814E+01 -1.276860E+01 -3.034004E+00 A4 3.944883E-02 -1.670490E-01 -4.266331E-01 -1.696843E+00 -7.396546E-01 -5.308488E-01 A6 4.774062E-01 3.857435E+00 -1.423859E+00 5.164775E+00 4.449101E-01 4.374142E-01 A8 -1.528780E+00 -7.091408E+01 4.119587E+01 -1.445541E+01 2.622372E-01 -3.111192E-01 A10 5.133947E+00 6.365801E+02 -3.456462E+02 2.876958E+01 -2.510946E-01 1.354257E-01 A12 -6.250496E+00 -3.141002E+03 1.495452E+03 -2.662400E+01 -1.048030E-01 -2.652902E-02 A14 1.068803E+00 7.962834E+03 -2.747802E+03 1.661634E+01 1.462137E-01 -1.203306E-03 A16 7.995491E+00 -8.268637E+03 1.443133E+03 -1.327827E+01 -3.676651E-02 7.805611E-04
[0272] An equation of the aspheric surfaces of the sixth optical embodiment is the same as that of the first optical embodiment, and the definitions are the same as well.
[0273] The exact parameters of the sixth optical embodiment based on Table 11 and Table 12 are listed in the following table:
TABLE-US-00026 Sixth optical embodiment (Reference wavelength: 555 nm) |f/f1| |f/f2| |f/f3| |f1/f2| |f2/f3| TP1/TP2 1.08042 0.46186 0.32763 2.33928 1.40968 1.33921 .SIGMA.PPR .SIGMA.NPR .SIGMA.PPR/|.SIGMA.NPR| IN12/f IN23/f TP2/TP3 1.40805 0.46186 3.04866 0.17636 0.09155 0.62498 TP2/(IN12 + TP2 + IN23) (TP1 + IN12)/TP2 (TP3 + IN23)/TP2 0.35102 2.23183 2.23183 HOS InTL HOS/HOI InS/HOS |ODT| % |TDT| % 2.90175 2.02243 1.61928 0.78770 1.50000 0.71008 HVT21 HVT22 HVT31 HVT32 HVT32/ HVT32/ HOI HOS 0.00000 0.00000 0.46887 0.67544 0.37692 0.23277 PhiA HOI 2.716 mm 1.792 mm InTL/HOS 0.6970 PLTA PSTA NLTA NSTA SLTA SSTA -0.002 mm 0.008 mm 0.006 mm -0.008 mm -0.007 0.006 mm mm
[0274] The results of the equations of the sixth optical embodiment based on Table 11 and Table 12 are listed in the following table:
TABLE-US-00027 Values related to the inflection points of the sixth optical embodiment (Reference wavelength: 555 nm) HIF221 0.5599 HIF221/HOI 0.3125 SGI221 -0.1487 |SGI221|/(|SGI221| + TP2) 0.2412 HIF311 0.2405 HIF311/HOI 0.1342 SGI311 0.0201 |SGI311|/(|SGI311| + TP3) 0.0413 HIF312 0.8255 HIF312/HOI 0.4607 SGI312 -0.0234 |SGI312|/(|SGI312| + TP3) 0.0476 HIF321 0.3505 HIF321/HOI 0.1956 SGI321 0.0371 |SGI321|/(|SGI321| + TP3) 0.0735
[0275] The figures related to the profile curve lengths obtained based on Table 11 and Table 12 are listed in the following table:
TABLE-US-00028 Sixth optical embodiment (Reference wavelength: 555 nm) 1/2 ARE ARE - 2(ARE/HEP) ARE/TP ARE (HEP) value 1/2(HEP) % TP (%) 11 0.546 0.598 0.052 109.49% 0.468 127.80% 12 0.500 0.506 0.005 101.06% 0.468 108.03% 21 0.492 0.528 0.036 107.37% 0.349 151.10% 22 0.546 0.572 0.026 104.78% 0.349 163.78% 31 0.546 0.548 0.002 100.36% 0.559 98.04% 32 0.546 0.550 0.004 100.80% 0.559 98.47% ARS ARS - (ARS/EHD) ARS/TP ARS EHD value EHD % TP (%) 11 0.640 0.739 0.099 115.54% 0.468 158.03% 12 0.500 0.506 0.005 101.06% 0.468 108.03% 21 0.492 0.528 0.036 107.37% 0.349 151.10% 22 0.706 0.750 0.044 106.28% 0.349 214.72% 31 1.118 1.135 0.017 101.49% 0.559 203.04% 32 1.358 1.489 0.131 109.69% 0.559 266.34%
[0276] The optical image capturing system of the present invention could reduce the required mechanism space by changing the number of lens.
[0277] It must be pointed out that the embodiments described above are only some embodiments of the present invention. All equivalent structures and methods which employ the concepts disclosed in this specification and the appended claims should fall within the scope of the present invention.
* * * * *
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
D00010
D00011
D00012

D00013

D00014

D00015

D00016

D00017
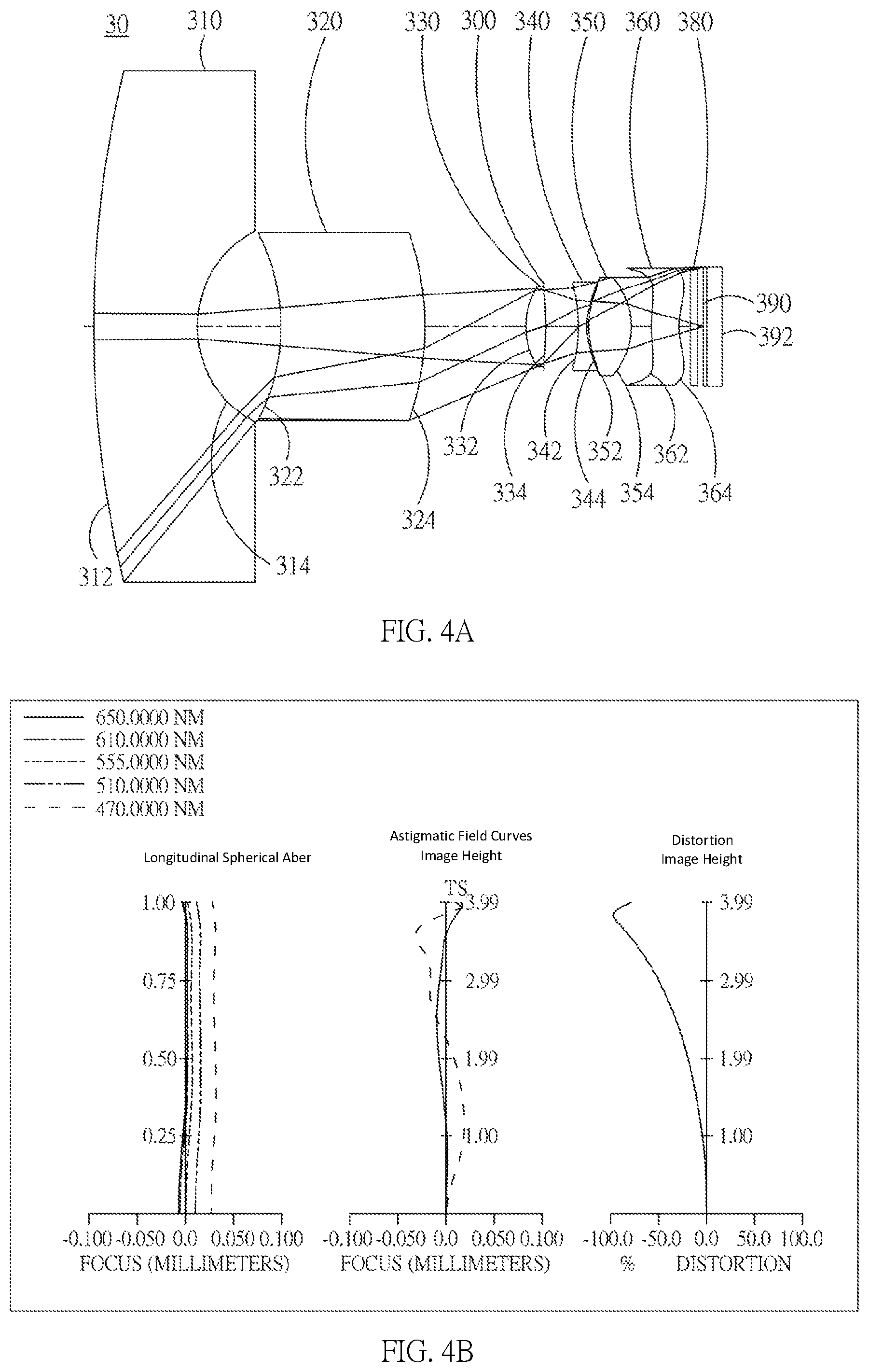
D00018

D00019

D00020

XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.