Cross Verification Of Data Captured By A Consumer Electronic Device
AZOULAY; Roy
U.S. patent application number 16/866572 was filed with the patent office on 2020-08-20 for cross verification of data captured by a consumer electronic device. This patent application is currently assigned to SERELAY LIMITED. The applicant listed for this patent is SERELAY LIMITED. Invention is credited to Roy AZOULAY.
| Application Number | 20200265035 16/866572 |
| Document ID | 20200265035 / US20200265035 |
| Family ID | 1000004811295 |
| Filed Date | 2020-08-20 |
| Patent Application | download [pdf] |








View All Diagrams
| United States Patent Application | 20200265035 |
| Kind Code | A1 |
| AZOULAY; Roy | August 20, 2020 |
CROSS VERIFICATION OF DATA CAPTURED BY A CONSUMER ELECTRONIC DEVICE
Abstract
A system for cross verification of data captured by a consumer electronic device is disclosed. Primary data, for example, a photograph, is captured by a mobile capture device, and metadata including the time and location of the capture is associated with the primary data. Environmental data, for example, pressure, temperature, visible WiFi networks, visible cell towers, is also measure by the mobile capture device. Other capture devices are identified in the vicinity and those other devices also measure environmental data. The measurements of environmental data can then be compared in order to calculate a confidence level in the position metadata associated with the primary data.
| Inventors: | AZOULAY; Roy; (Oxford, GB) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Assignee: | SERELAY LIMITED |
||||||||||
| Family ID: | 1000004811295 | ||||||||||
| Appl. No.: | 16/866572 | ||||||||||
| Filed: | May 5, 2020 |
Related U.S. Patent Documents
| Application Number | Filing Date | Patent Number | ||
|---|---|---|---|---|
| 15863419 | Jan 5, 2018 | 10678780 | ||
| 16866572 | ||||
| 62442825 | Jan 5, 2017 | |||
| Current U.S. Class: | 1/1 |
| Current CPC Class: | H04W 12/00504 20190101; H04W 4/02 20130101; G06F 16/907 20190101; G06F 16/2365 20190101; H04W 12/00502 20190101; G01C 1/00 20130101; H04W 12/1004 20190101; H04W 12/00503 20190101; H04W 12/1006 20190101 |
| International Class: | G06F 16/23 20060101 G06F016/23; H04W 12/10 20060101 H04W012/10; G01C 1/00 20060101 G01C001/00; G06F 16/907 20060101 G06F016/907 |
Claims
1. A system for attributing a confidence level to time and location metadata associated with primary data, the system including a plurality of mobile capture devices and a mobile data communication network allowing data transfer between the mobile capture devices, each mobile capture device including at least one sensor for capturing primary data, and being adapted to provide metadata specifying at least the time and location relating to captured primary data, and each mobile capture device further including at least one further sensor for measuring at least one environmental parameter, each mobile capture device being adapted to carry out the steps of: capturing primary data using the at least one sensor; associating metadata with the primary data, the metadata specifying at least the time and location of the capture; and measuring and storing at least one environmental parameter at the time and location of the capture, and associating the measured environmental parameter with the primary data, in response to a trigger, and each mobile capture device being adapted to carry out the steps of: measuring and storing at least one environmental parameter; and transmitting the measured environmental parameter on the communication network, in response to a remote command, and the system including at least one device connected to the data communication network and being adapted to: in response to a capture of primary data being made by a mobile capture device forming part of the system, carry out the steps of: identifying other mobile capture devices in a similar location at a similar time to the capture device making the primary data capture; requesting and receiving environmental data from other mobile capture devices identified; comparing environmental data received from other mobile capture devices with the environmental data measured by the device capturing the primary data, and assigning a confidence level to the time and location metadata associated with the primary data based on the comparison.
2. A system as claimed in claim 1, wherein the at least one sensor for measuring the at least one environmental parameter includes at least one of a thermometer, a hydrometer, a pressure sensor, and/or a light level sensor.
3. A system as claimed in claim 1, wherein the at least one sensor for measuring the at least one environmental parameter includes at least one of a WiFi transceiver for detecting visible WiFi networks and a mobile telecommunications transceiver for detecting visible cell towers.
4. A system as claimed in claim 1, wherein at least one device of the plurality of mobile capture devices is a server, and wherein the server identifies other nearby devices and makes comparisons.
5. A system as claimed in claim 1, wherein at least one device of the plurality of mobile capture devices is a mobile telephone comprising a processor and a computer program for execution on the processor.
6. A system as claimed in claim 1, wherein in which the confidence level comprises a binary "verified" or "unverified" value.
7. A system as claimed in claim 1, wherein the binary value is calculated by: .delta. x .delta. p < Max ##EQU00007## where .delta.x is the difference in an environmental parameter measured by two of the mobile capture devices, and .delta.p is the difference in the position of the two devices, and Max is a threshold, and where a "verified" value is returned if .delta. x .delta. p ##EQU00008## is less than Max, otherwise an "unverified" value is returned.
8. A system as claimed in claim 1, wherein a multi-level confidence value is calculated by: .delta. x .delta. p ##EQU00009## where .delta.x is the difference in an environmental parameter measured by two of the mobile capture devices, and .delta.p is the difference in the position of the two devices, and a low value of the ratio .delta. x .delta. p ##EQU00010## indicates a high confidence, and vice versa.
9. A system as claimed in claim 1, wherein a maximum difference in position .delta.p which determines a device in the plurality of mobile capture devices to be in the similar location to the other mobile capture devices is variable according to a density of mobile capture devices in a relevant area.
10. A system as claimed in claim 1, wherein environmental data for a particular position is compared to a third party data source.
11. A system as claimed in claim 11, wherein visible WiFi networks and/or visible cell towers are compared to the third party data source.
12. A system as claimed in claim 10, wherein a position is compared to the third party data source, and wherein the position comprises elevation.
13. A system as claimed in claim 12, wherein the elevation is compared to an estimated elevation determined from a pressure sensor.
14. A system as claimed in claim 13, wherein the estimated elevation is determined according to: h = 2 7 3 . 1 5 + T 0 0 . 0 0 6 5 ( 1 - ( P P 0 ) 1 5.255 ) ##EQU00011##
15. A system for collecting environmental data, the system comprising at least one mobile capture device, wherein the at least one mobile capture device carries out the steps of: capturing primary data; associating metadata with the primary data, measuring environmental data; associating the environmental data with the metadata; storing the environmental data and the metadata; utilizing the metadata to identify other mobile capture devices nearby; accessing the other mobile capture devices; using the other mobile capture devices to collect additional environmental data; and verifying the environmental data by comparing the environmental data with the additional environmental data.
16. The system for collecting environmental data of claim 15, wherein the other mobile capture devices are triggered by the at least one mobile capture device.
17. The system for collecting environmental data of claim 16, wherein the triggering comprises a timed, pre-set trigger.
18. A method for measuring an environmental parameter, the method comprising: capturing primary data using a capture device; associating metadata with the primary data; measuring an environmental parameter using the capture device; transmitting a message to a server, wherein the message comprises the capture device's physical location; using the metadata to identify other capture devices near the capture device; and utilizing the other capture devices to cross-verify the environmental parameter measured by the capture device.
19. The method for measuring an environmental parameter of claim 18, wherein the metadata originates from the capture device.
20. The method for measuring an environmental parameter of claim 18, wherein the cross-verification further comprises: verifying accuracy of the environmental parameter measured by the capture device.
Description
CROSS-REFERENCE TO RELATED APPLICATIONS
[0001] This application is a continuation of U.S. application Ser. No. 15/863,419, filed Jan. 5, 2018, which claims priority to Application No. 62/442,825, filed Jan. 5, 2017, each of which is incorporated by reference in their respective entireties.
FIELD OF THE INVENTION
[0002] The present invention relates to a system and method for verifying the accuracy of metadata attached to primary data captured by a capture device. For example, primary data could be a photograph, sound recording or video recording captured by a consumer electronic device such as a mobile telephone. The metadata may relate to the time and/or location of the capture.
BACKGROUND TO THE INVENTION
[0003] It is now common for modern mobile telephones to include a camera for capturing stills and video, and a microphone for capturing sound recordings, either as a sound channel to a video recording or a separate sound recording.
[0004] Known devices, as well as recording primary data (e.g. a photograph or a video), also record metadata relating to the capture. For example, when capturing a photograph, many devices will store the current time and date, and coordinates of the physical location of the device when the photograph was captured.
[0005] In most cases, this metadata is a convenient feature which is useful to a consumer so that he can view and share his photographs (for example) based on where and when they were taken, without the need to make notes and organise the captured pictures manually. However, in some cases verifying that the time and place attached to a particular photograph is accurate may be critical.
[0006] News organisations often receive submitted photographs and videos from members of the public, but these organisations have to be careful to verify the authenticity of what they are being presented with--in particular that the photograph (for example) really was taken at the time and place claimed. In the past, even reputable news organisations have fallen victim to falsified submitted photographs and published them as genuine.
[0007] There are generally no safeguards against false attribution of time and place to a photograph on known devices. Even if a mechanism exists to ensure that the current GPS location of the device is stored with the photograph, and even if there is a mechanism to prevent later tampering with that location metadata, it is known that GPS transmissions can be "spoofed" by an external transmitter, to cause a GPS receiver to report an incorrect location.
[0008] It is an object of the present invention to provide means by which the integrity of metadata attached to primary data by a consumer electronic device may be verified with various levels of confidence.
SUMMARY OF THE INVENTION
[0009] According to the present invention, there is provided a system for attributing a confidence level to time and location metadata associated with primary data, the system including a plurality of mobile capture devices and a mobile data communication network allowing data transfer between the mobile capture devices, [0010] each mobile capture device including at least one sensor for capturing primary data, and being adapted to provide metadata specifying at least the time and location relating to captured primary data, and each mobile capture device further including at least one further sensor for measuring at least one environmental parameter, [0011] each mobile capture device being adapted to carry out the steps of: [0012] capturing primary data using the at least one sensor; [0013] associating metadata with the primary data, the metadata specifying at least the time and location of the capture; and [0014] measuring and storing at least one environmental parameter at the time and location of the capture, and associating the measured environmental parameter with the primary data, [0015] in response to a trigger, [0016] and each mobile capture device being adapted to carry out the steps of: [0017] measuring and storing at least one environmental parameter; and [0018] transmitting the measured environmental parameter on the communication network, [0019] in response to a remote command, [0020] and the system including at least one device connected to the data communication network and being adapted to: [0021] in response to a capture of primary data being made by a mobile capture device forming part of the system, [0022] carry out the steps of: [0023] identifying other mobile capture devices in a similar location at a similar time to the capture device making the primary data capture; [0024] requesting and receiving environmental data from other mobile capture devices identified; [0025] comparing environmental data received from other mobile capture devices with the environmental data measured by the device capturing the primary data, and assigning a confidence level to the time and location metadata associated with the primary data based on the comparison.
[0026] The environmental data could be one or more of, for example, temperature, humidity, barometric pressure, light level, etc. Environmental data could also include for example visible WiFi networks and cell towers. By comparing environmental data measured by the device capturing, for example, a photograph, with environmental data captured by other devices in a similar location at a similar time, the location metadata attached to the photograph by the capturing device can be given a confidence score.
[0027] A capture device responds to a trigger (for example a user command) by taking (for example) a photograph and recording time and location metadata. The time is typically taken from an internal clock on the capture device, which is synchronised at intervals with a network time server. The position information is usually taken from for example a GPS or GLONASS receiver on the device.
[0028] When a capture is made by a particular device, this triggers action in other parts of the system. In particular, other nearby capture devices will measure and report environmental data for the purposes of comparison. The users/owners of these other nearby devices do not need to take any action, and in most cases do not even need to be specifically aware that environmental data is being captured and reported at a particular time, provided that they have previously consented to the collection of data, and provided that the data collected is suitably anonymised so that it cannot be linked back to a particular user. The trigger may be a direct user command on the capture device, or alternatively devices could be set on timed triggers, for example to take a photograph every hour, or in response to a motion sensor, or any other trigger.
[0029] The device which identifies other nearby devices and makes comparisons could be a server device, or alternatively could be a capture device--either the same capture device capturing the relevant primary data or a different capture device in the system. Depending on the wider context of the system and the trust model, it may be acceptable for the same capture device to play a close role in verifying its own data, in cases where the problem being addressed is specifically external devices fooling a capture device into reporting an inaccurate location, rather than untrustworthy capture devices.
[0030] Each mobile capture device may be in the form of a modern mobile telephone, including in particular a processor, and running application software to cause it to carry out the steps required by the system of the invention.
[0031] The confidence level in some embodiments may be a binary value indicating either that some confidence threshold has been met or not, i.e. that the time and location metadata attached to the primary data is either verified or not, or alternatively in other embodiments a numeric value or other multi-level output may be provided, indicating the level of confidence in the time and location metadata.
[0032] Other devices may be identified within a similar location, for example a radius of one mile, to provide data for cross-verification. In urban areas, there may be a large number of devices very close by, for example within a few hundred metres. In less-populated areas there are likely to be fewer other devices and the range may need to be extended. A "similar location" may therefore be defined dynamically--only very close devices might be used where the area is densely populated with many devices, whereas in a less populated area a "similar location" may include devices further away.
[0033] For a particular comparison of an environmental parameter x being made with another device which is a distance of .delta.p away, a condition
.delta. x .delta. p < Max ##EQU00001##
may be checked to provide a binary answer. If the difference in the environmental parameter .delta.x divided by the distance between the devices is less than a threshold, then that particular cross-verification is successful--the environmental data collected by the capturing device is said to be consistent with environmental data collected by another nearby device.
[0034] In some embodiments, there may also be a difference in time between measurements of environmental data on different devices. In that case the time difference .delta.t can also be accounted for in the comparison. However, it is preferable for time differences to be very small if possible. This is achieved by requesting environmental data from other devices for comparison immediately when a capture is made. In some embodiments, the user could even trigger this information to be requested from other devices in advance, and receive feedback when the capture device in use is able to produce a "verified location", and then choose to take a photograph. Otherwise, the environmental data from other devices should be obtained as soon as possible after a capture is made. In cases where there is no network connectivity available at the time of capture, environmental data from other devices might be delayed, but any significant delay can be taken account of and will reduce the confidence level of the location data.
[0035] If a numeric or multi-level, rather than binary answer is required, then instead of comparing with a threshold the ratio
.delta. x .delta. p ##EQU00002##
can be used as a confluence score, or as an input to further functions used to calculate a confidence score.
[0036] In preferred embodiments multiple different environmental parameters may be used. In that case, for a particular comparison with another device the difference in a weighted sum of two or more parameters over the difference in distance may be used:
.delta. ( a x + by + nz N ) .delta. p ##EQU00003##
[0037] In this example, each parameter x, y . . . , z may be given a different weight a, b . . . n. The weighted sums in each position are differenced and then divided by the difference in position. Again, the result of this can be compared to a threshold to provide a binary answer, or may be used in conjunction with further functions to provide a numeric or multi-level answer.
[0038] Where multiple other devices have reported environmental data, the single- or multi-parameter ratio may be calculated between the capturing device and each other device. The results may then be combined in various ways. For example, in some embodiments the condition
.delta. x .delta. p < Max or .delta. ( a x + by + nz N ) .delta. p < Max ##EQU00004##
might have to be met for every other comparison with every other device in order to declare the position as verified. In other embodiments a threshold, for example 80% of devices having consistent data, may be enough. In yet other embodiments a numeric or multi-level confidence score may be derived from the absolute number or proportion of other devices which have consistent environmental data.
[0039] Different devices forming part of the same system may have different hardware sensors and different capabilities. Comparisons can be made with sets of environmental parameters which are common to both devices. For example, if one device can measure temperature, light level and pressure and another device can measure temperature, light level and humidity, then a comparison involving data from these two devices could use temperature and light level but not humidity or pressure.
[0040] These conditions assume that the environmental parameters reported by devices are numeric. Many relevant parameters are numeric data, for example temperature, barometric pressure, light level etc. However, some embodiments may use more complex data, for example WiFi networks and/or cell towers seen in the area. Different types of comparisons may therefore be needed to handle this type of data. For example, devices could report lists of `visible` WiFi networks. From these lists three numbers can immediately be derived--number of networks seen only by device a, number of networks seen only by device b, and number of networks seen by both devices. Where the devices report a location closer than a certain threshold (for example a few tens of meters), a high number of networks seen by both devices when compared to the number of networks seen only by one device may be an indicator of high confidence in the location.
[0041] In addition to cross-verifying with data from other devices in the system, certain data may be compared with third-party data sources. For example, the OpenCellID database provides information about cell towers and WiFi networks corresponding with locations. By comparing the cell towers and/or WiFi networks seen by the capturing device (or even by another nearby device forming part of the same system) with reference data from a trusted third party data source, a further level of confidence may be achieved.
[0042] As another example, GPS data provides not only two-dimensional position (i.e. latitude and longitude) but also elevation. The combination of latitude, longitude and elevation can be compared to third party mapping data to further increase confidence. If the GPS position is recording for example an elevation of just 50 m above sea level but mapping data shows that the two-dimensional position is in a mountain range, then the purported location may be unreliable.
[0043] As a further example, certain environmental data collected by the capturing device can be compared with the purported location data by making use of known relationships. For example, GPS position may indicate a particular elevation, and as described above this may correspond with the two dimensional GPS position and mapping data. Where the capture device includes a pressure sensor, the pressure measured by the pressure sensor may be used to calculate an estimated height, which may also be compared to the measured/mapped position. The following formula may be used to estimate the height from a pressure reading:
h = 2 7 3 . 1 5 + T 0 0 . 0 0 6 5 ( 1 - ( P P 0 ) 1 5.255 ) ##EQU00005##
[0044] Where T.sub.0 is standard temperature (15.degree. C.) and P.sub.0 is reference pressure (1013.25 hPa). P is the measured pressure and h is the estimated height.
DESCRIPTION OF THE DRAWINGS
[0045] For a better understanding of the present invention, and to show more clearly how it may be carried into effect, preferred embodiments will now be described with reference to the accompanying drawings, in which:
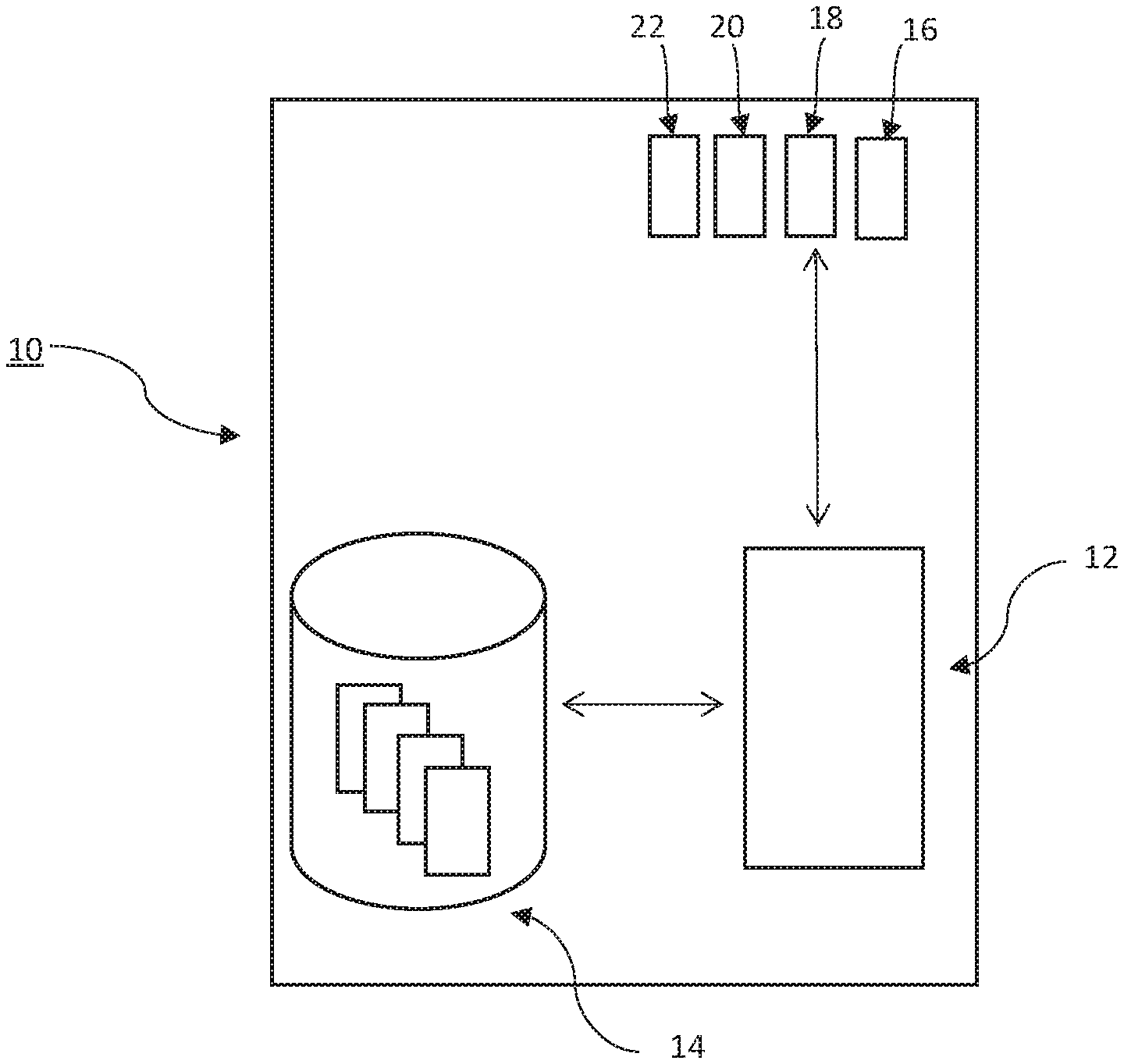
[0046] FIG. 1 shows an outline schematic of a mobile capture device forming part of the system of the invention;
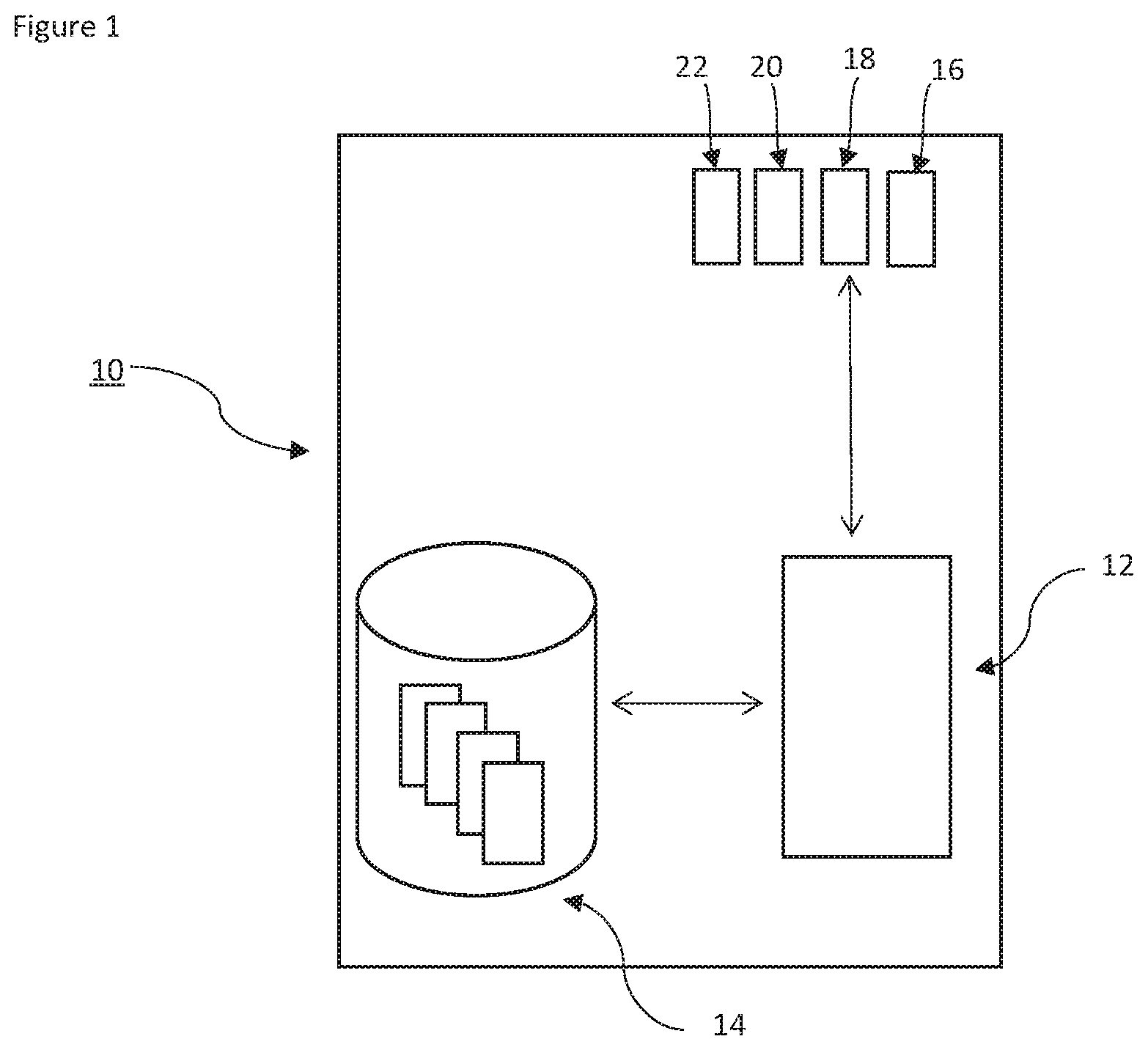
[0047] FIG. 2 shows an outline schematic of an embodiment of the system of the invention; and
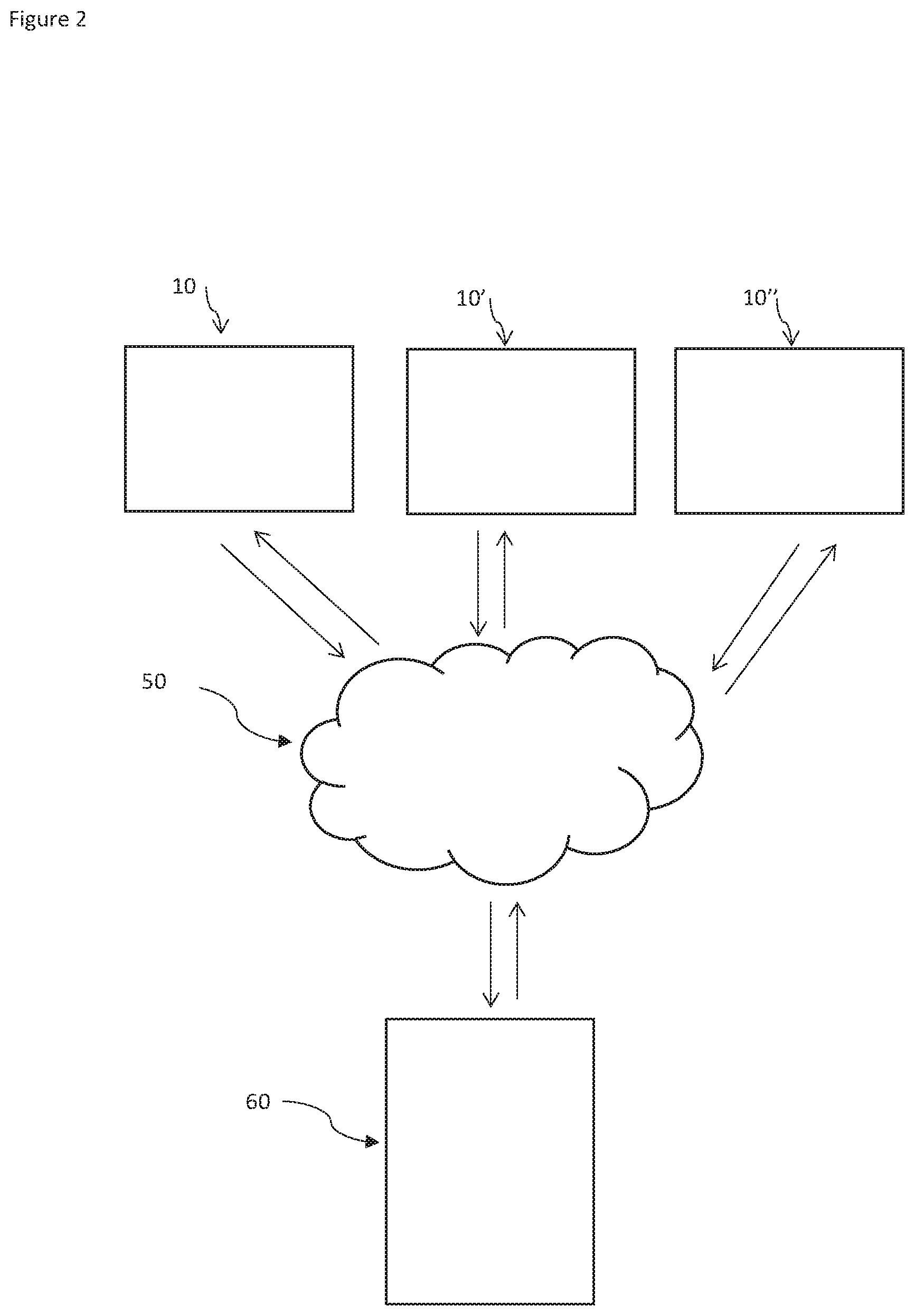
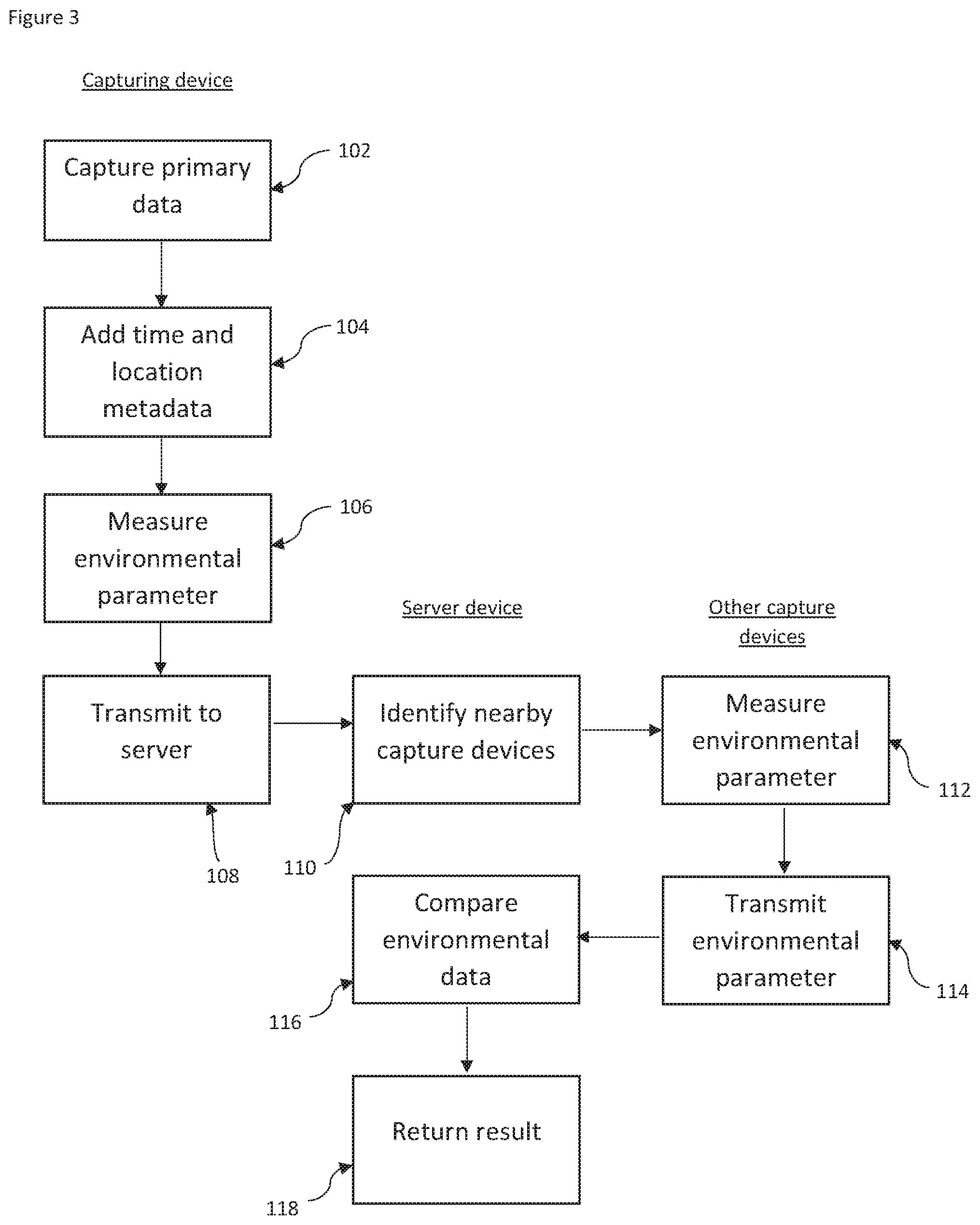
[0048] FIG. 3 is a flow chart showing the processes carried out by various components of the system of the invention.
DESCRIPTION OF THE PREFERRED EMBODIMENT
[0049] Referring firstly to FIG. 1, a mobile smartphone is indicated at 10. The smartphone is a mobile capture device in the system of the invention. Different models of smartphone of course have different features, but critical to the system of the invention are that the smartphone 10 includes a processor 12, data storage 14, at least one sensor for capturing primary data (for example a camera 16 and a microphone 18), a positioning system (for example a GPS receiver 20) and at least one sensor for measuring an environmental parameter, for example a pressure sensor 22.
[0050] In FIG. 2, an overview of a whole system is shown in outline. The system 100 includes multiple mobile capture devices 10, 10', 10''. In most embodiments, each mobile capture device 10 would be a mobile smartphone conforming to at least a minimum specification. Each capture device 10 in the system could therefore include slightly different hardware components and capabilities. All of the mobile capture devices are connected to a data communications network 50. The network 50 is not described in detail but in most embodiments will be a complex network or internetwork including multiple components. All devices connected to the network can communicate with each other.
[0051] A server device 60 is shown as a separate device, also connected to the network. There is no reason in principle why one or more of the mobile capture devices 10 could not perform the role of the server device, but in this embodiment a dedicated device is illustrated.
[0052] Referring now to FIG. 3, the process of creating and verifying primary data with associated time and location metadata is illustrated. Note that this process involves actions on the "capturing device" 10, and "other capture devices" 10', 10''. The term "capturing device" is used to mean one of the mobile capture devices in the system which is currently being used to capture primary data (e.g. take a photograph). Any of the mobile capture devices at any time may take this role, normally in response to a user command or other trigger.
[0053] At step 102 the capturing device 10 captures primary data. This is typically in response to a user command but in some embodiments another trigger, for example a time trigger, a motion sensor or a remote trigger might set off the process on the capturing device. Capturing primary data typically means taking a photograph, or making a video recording or a sound recording. The primary data is stored by the capturing device 10 in data storage 14.
[0054] At step 104 time and location metadata is associated with the primary data. The time typically comes from an internal clock on the capturing device 10, and the location from the GPS receiver 20. Associating the metadata with the primary data can be done by embedding it into the primary data file, associating it in a database, etc. In some embodiments cryptographic techniques may be used to bind the primary data and metadata together and prevent tampering. Various other security safeguards may be built into the device to attempt to ensure that the time and location metadata is difficult to tamper with or "spoof".
[0055] Where the primary data is a video or sound recording, i.e. data which is captured over a period of time, it may be desirable to repeat step 104 at intervals, since it is possible for the capturing device 10 to move significantly during a long recording.
[0056] At step 106 an environmental parameter is measured by the capturing device 10. This parameter could be for example the barometric pressure which is measured by the pressure sensor 22 on the capturing device. In most embodiments, most of the mobile capture devices in the system will have multiple sensors for measuring different environmental parameters, and the capturing device will measure as many environmental parameters as it can. Environmental parameters could be for example temperature, light level, barometric pressure, WiFi networks visible, cell towers visible, etc.
[0057] At step 108 a message is transmitted to the server device 60. In this embodiment a server device 60 has a role in coordinating the process, but a decentralised embodiment is also envisaged. The message transmitted to the server at step 108 includes the position of the capturing device, and triggers the process of cross-verification. The server 60 takes the transmitted position and identifies nearby other mobile capture devices 10', 10'' at step 110. In some embodiments the server may constantly keep track of the positions of all devices in the system, in other embodiments nearby devices may be identified by broadcasting a message to all devices on the system and requesting replies from those close to a particular position. The server may start by trying to identify devices very close (say within a few tens of metres) to the position of the capturing device 10, but in rural or sparsely-populated areas the server may have to expand the search range to find devices. The server 60 must also identify other devices which are compatible with the capturing device 10, in the sense that to provide useful cross-verification information, devices must be able to measure at least one environmental parameter in common with the capturing device. Of course, in embodiments where visible cell towers and/or WiFi networks are used as environmental parameters, almost all devices will be compatible at least to this extent.
[0058] Once compatible devices in a suitable area have been identified, the server transmits a message to those devices requesting measurements of environmental parameters. At step 112 each other device measures the requested environmental parameters, and at step 114 the measured parameters are transmitted back to the server 60. If the server device does not already have it, a precise position (typically obtained from a GPS receiver on each device) is also transmitted back to the server 60.
[0059] At step 116 the server compares environmental data. This could be by the weighted sum method described in more detail above--the server determines the result of:
.delta. ( a x + by + nz N ) .delta. p < Max ##EQU00006##
[0060] and if the difference in the weighted sum over the difference in position is less than a threshold for a particular comparison between data from the capturing device and data from another device, then that other device is effectively in agreement with the capturing device. A confidence level may be assigned depending on, for example, the number of other devices which are in agreement.
[0061] At step 118 a result is returned. In different embodiments this result may be transmitted back to the capturing device 10, stored in a database, embedded in the primary data with cryptographic safeguards, etc. The result may simply be a binary "verified" or "unverified" depending on whether threshold conditions for the consistency of data have been met. Alternatively a numeric or multi-level result may be calculated in different embodiments.
[0062] The system of the invention preferably forms part of a wider system for creating verifiable data. Such a system should contain security safeguards to prevent tampering with data and ensure devices can be trusted. An example of such a system is disclosed in the Applicant's co-pending application number PCT/IB2018/050036 filed on 3 Jan. 2018.
[0063] The system of the invention allows for confidence in time and position metadata which is attached to, for example, a photograph. Where the position information attached to a photograph is shown to have been verified by the system of the invention, an increased level of confidence can be given to that information, because the system of the invention makes it very difficult to attach false metadata and have that metadata verified, since to do so would involve compromising a large number of third party devices.
[0064] The embodiment described is by way of example only. The invention is defined in the claims.
* * * * *
D00000
D00001
D00002
D00003



XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.