System, Vehicle, Network Component, Apparatuses, Methods, And Computer Programs For A Transportation Vehicle And A Network Compo
KWOCZEK; Andreas ; et al.
U.S. patent application number 16/750063 was filed with the patent office on 2020-07-30 for system, vehicle, network component, apparatuses, methods, and computer programs for a transportation vehicle and a network compo. The applicant listed for this patent is VOLKSWAGEN AKTIENGESELLSCHAFT. Invention is credited to Guillaume JORNOD, Andreas KWOCZEK, Andreas PFADLER, Daniel REIMANN.
| Application Number | 20200239030 16/750063 |
| Document ID | 20200239030 / US20200239030 |
| Family ID | 65243402 |
| Filed Date | 2020-07-30 |
| Patent Application | download [pdf] |





| United States Patent Application | 20200239030 |
| Kind Code | A1 |
| KWOCZEK; Andreas ; et al. | July 30, 2020 |
SYSTEM, VEHICLE, NETWORK COMPONENT, APPARATUSES, METHODS, AND COMPUTER PROGRAMS FOR A TRANSPORTATION VEHICLE AND A NETWORK COMPONENT
Abstract
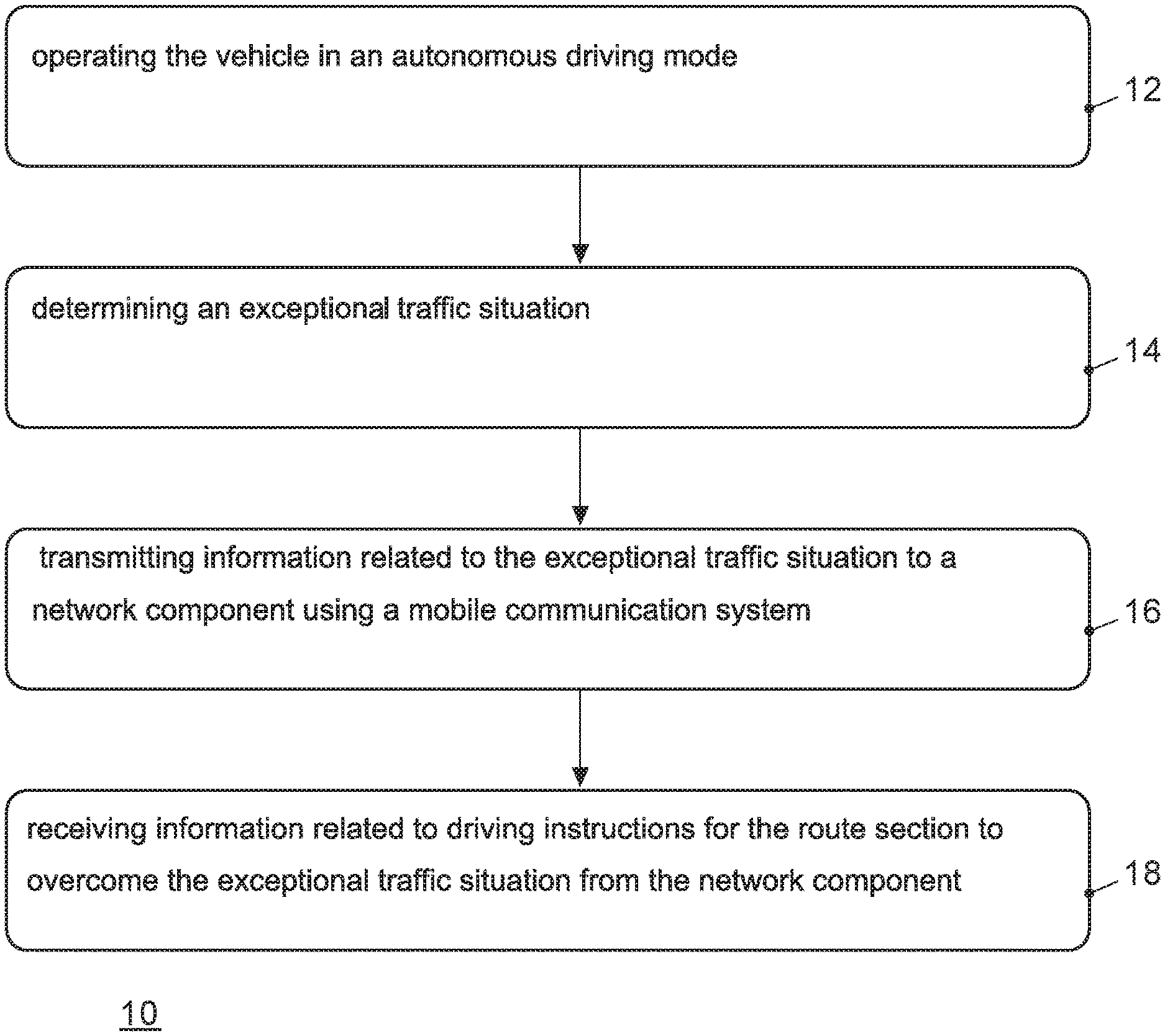
A system, a transportation vehicle, a network component, apparatuses, methods, and computer programs for a transportation vehicle and a network component. The method for a transportation vehicle to determine a route section includes operating the transportation vehicle in an automated driving mode and determining an exceptional traffic situation. The method also includes transmitting information related to the exceptional traffic situation to a network component using a mobile communication system and receiving information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component.
| Inventors: | KWOCZEK; Andreas; (Lehre, DE) ; PFADLER; Andreas; (Berlin, DE) ; JORNOD; Guillaume; (Berlin, DE) ; REIMANN; Daniel; (Braunschweig, DE) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Family ID: | 65243402 | ||||||||||
| Appl. No.: | 16/750063 | ||||||||||
| Filed: | January 23, 2020 |
| Current U.S. Class: | 1/1 |
| Current CPC Class: | G01C 21/362 20130101; G05D 1/0027 20130101; G05D 1/0088 20130101; B60W 60/0059 20200201; G05D 2201/0213 20130101; B60W 40/04 20130101; G08G 1/164 20130101; G01C 21/3691 20130101; G08G 1/096811 20130101; G06K 9/00791 20130101; G05D 1/0038 20130101; G05D 1/0212 20130101; G08G 1/0112 20130101; G08G 1/0133 20130101; G08G 1/0145 20130101; G01C 21/3647 20130101; G08G 1/0129 20130101; G07C 5/008 20130101; B60W 60/0053 20200201 |
| International Class: | B60W 60/00 20060101 B60W060/00; B60W 40/04 20060101 B60W040/04; G01C 21/36 20060101 G01C021/36; G07C 5/00 20060101 G07C005/00; G05D 1/00 20060101 G05D001/00 |
Foreign Application Data
| Date | Code | Application Number |
|---|---|---|
| Jan 29, 2019 | EP | 19154194.5 |
Claims
1. An apparatus for a transportation vehicle, the apparatus comprising: one or more interfaces configured to communicate in a mobile communication system; and a control module configured to control the one or more interfaces, wherein the control module is further configured to determine a route section for use in operating the transportation vehicle in an automated driving mode to avoid an exceptional traffic situation, wherein the control module is configured to determine the exceptional traffic situation, transmit information related to the exceptional traffic situation to a network component using a mobile communication system, and receive information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component, wherein the received information related to driving instructions comprises an instruction to manually operate the transportation vehicle out of the exceptional traffic situation, whereby the route section is determined based on the manual operation of the transportation vehicle out of the exceptional traffic situation, and, thereafter, information related to the route section determined based on the manual operation of the transportation vehicle is transmitted to the network component.
2. The apparatus of claim 1, wherein the information related to driving instructions further comprises tele-operating the transportation vehicle along the route section to overcome the exceptional traffic situation.
3. The apparatus of claim 1, wherein the information related to driving instructions further comprises information on the route section from the network component and wherein the method comprises automatically operating the transportation vehicle along the route section.
4. The apparatus of claim 1, wherein information related to an environmental model of the transportation vehicle is received by the apparatus in addition to the information related to the exceptional traffic situation.
5. The apparatus of claim 1, wherein information related to transportation vehicle data and video data is transmitted to the network component in addition to the information related to the exceptional traffic situation.
6. A transportation vehicle including the apparatus of claim 1.
7. An apparatus for a network component, the apparatus comprising: one or more interfaces configured to communicate in a mobile communication system; and a control module configured to control the one or more interfaces, wherein the control module is further configured to enable the network component to determine a route section for a transportation vehicle to overcome an exceptional traffic situation, wherein the control module receives information related to the exceptional traffic situation from the transportation vehicle using the mobile communication system, obtains information related to driving instructions for the route section to overcome the exceptional traffic situation, and transmits information related to the driving instructions for the route section to overcome the exceptional traffic situation to the transportation vehicle, and wherein the driving instructions comprise instructions for a user of the transportation vehicle to manually operate the transportation vehicle out of the exceptional traffic situation, wherein information related to the route section is stored in a storage by the apparatus.
8. The apparatus of claim 7, wherein the information related to the driving instructions comprises retrieved previously stored information related to the route section from storage.
9. The apparatus of claim 7, wherein the information related to the driving instructions comprises tele-operating the transportation vehicle out of the exceptional traffic situation, and/or wherein the method further comprises receiving information related to an environmental model of the transportation vehicle from the transportation vehicle, and wherein the obtaining of the information related to the driving instructions comprises determining information related to the route section based on the information related to the environmental model of the transportation vehicle, wherein the method further comprises storing information related to the route section in a storage.
10. A network component comprising the apparatus of claim 7.
11. A method for a transportation vehicle to determine a route section, the method comprising: operating the transportation vehicle in an automated driving mode; determining an exceptional traffic situation; transmitting information related to the exceptional traffic situation to a network component using a mobile communication system; and receiving information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component, wherein the received information related to driving instructions comprises an instruction to manually operate the transportation vehicle out of the exceptional traffic situation, whereby the route section is determined based on the manual operation of the transportation vehicle out of the exceptional traffic situation, and, thereafter, the method further comprises transmitting information related to the route section determined based on the manual operation of the transportation vehicle to the network component.
12. The method of claim 11, wherein the information related to driving instructions further comprises tele-operating the transportation vehicle along the route section to overcome the exceptional traffic situation.
13. The method of claim 11, wherein the information related to driving instructions further comprises information on the route section from the network component and wherein the method comprises automatically operating the transportation vehicle along the route section.
14. The method of claim 11, further comprising providing information related to an environmental model of the transportation vehicle in addition to the information related to the exceptional traffic situation.
15. The method of claim 11, further comprising providing information related to transportation vehicle data and video data to the network component in addition to the information related to the exceptional traffic situation.
16. A method for a network component to determine a route section for a transportation vehicle, the method comprising: receiving information related to an exceptional traffic situation from the transportation vehicle using a mobile communication system; obtaining information related to driving instructions for the route section to overcome the exceptional traffic situation; and transmitting information related to the driving instructions for the route section to overcome the exceptional traffic situation to the transportation vehicle, wherein the driving instructions comprise instructions for a user of the transportation vehicle to manually operate the transportation vehicle out of the exceptional traffic situation, and wherein the method further comprises storing information related to the route section in a storage.
17. The method of claim 16, wherein the obtaining of the information related to the driving instructions comprises retrieving previously stored information related to the route section from a storage.
18. The method of claim 16, wherein the obtaining of the information related to the driving instructions comprises tele-operating the transportation vehicle out of the exceptional traffic situation, and/or wherein the method further comprises receiving information related to an environmental model of the transportation vehicle from the transportation vehicle, and wherein the obtaining of the information related to the driving instructions comprises determining information related to the route section based on the information related to the environmental model of the transportation vehicle, wherein the method further comprises storing information related to the route section in a storage.
19. A computer program having a program code for performing a method for a transportation vehicle to determine a route section when the computer program is executed on a computer, a processor, or a programmable hardware component, the method comprising: operating the transportation vehicle in an automated driving mode; determining an exceptional traffic situation; transmitting information related to the exceptional traffic situation to a network component using a mobile communication system; and receiving information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component, wherein the received information related to driving instructions comprises an instruction to manually operate the transportation vehicle out of the exceptional traffic situation, whereby the route section is determined based on the manual operation of the transportation vehicle out of the exceptional traffic situation, and, thereafter, the method further comprises transmitting information related to the route section determined based on the manual operation of the transportation vehicle to the network component.
20. A computer program having a program code for performing a method for a network component to determine a route section for a transportation vehicle when the computer program is executed on a computer, a processor, or a programmable hardware component, the method comprising: receiving information related to an exceptional traffic situation from the transportation vehicle using a mobile communication system; obtaining information related to driving instructions for the route section to overcome the exceptional traffic situation; and transmitting information related to the driving instructions for the route section to overcome the exceptional traffic situation to the transportation vehicle, wherein the driving instructions comprise instructions for a user of the transportation vehicle to manually operate the transportation vehicle out of the exceptional traffic situation, and wherein the method further comprises storing information related to the route section in a storage.
Description
PRIORITY CLAIM
[0001] This patent application claims priority to European Patent Application No. 19154194.5, filed 29 Jan. 2019, the disclosure of which is incorporated herein by reference in its entirety.
SUMMARY
[0002] Illustrative embodiments relate to a system, a transportation vehicle, a network component, apparatuses, methods, and computer programs for a transportation vehicle and a network component, more particularly, but not exclusively, to a concept for determining a route section for overcoming an exceptional traffic situation of a transportation vehicle.
BRIEF DESCRIPTION OF THE DRAWINGS
[0003] Disclosed embodiments will be described using the following non-limiting apparatuses or methods or computer programs or computer program products by way of example only, and with reference to the accompanying figures, in which:
[0004] FIG. 1 shows a block diagram of an embodiment of a method for a transportation vehicle;
[0005] FIG. 2 shows a block diagram of an embodiment of a method for a network component;
[0006] FIG. 3 shows embodiments of an apparatus for a transportation vehicle and a transportation vehicle, embodiments of an apparatus for a network component and a network component, and an embodiment of a system;
[0007] FIG. 4 illustrates an exceptional traffic scenario in an embodiment;
[0008] FIG. 5 illustrates embodiments of a transportation vehicle and a network component; and
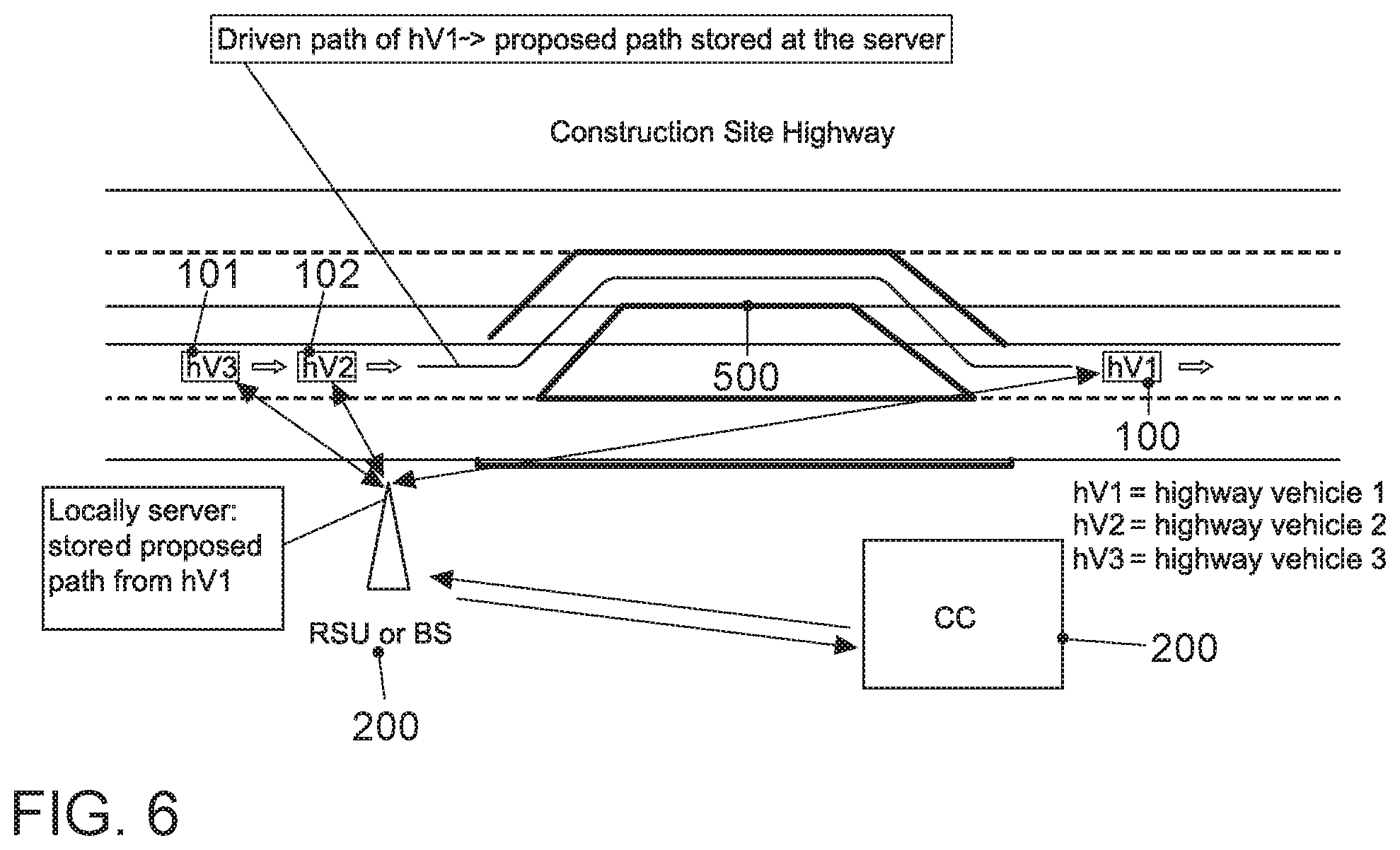
[0009] FIG. 6 shows another exceptional traffic scenario in an embodiment.
DETAILED DESCRIPTION
[0010] Document US 2018/0322775 A1 describes an Autonomous Vehicle Enhancement System (AVES) and method for monitoring and managing a virtual or existing fleet of autonomous transportation vehicles in a transportation network and dispatching the autonomous transportation vehicles to users. The AVES includes an AVES Central Operations Center (COC) that communicates with AVES vehicle equipment installed in the autonomous transportation vehicles and AVES applications installed on computing devices accessible by the users. The AVES improves the operating efficiency of a transportation network by monitoring the condition of autonomous transportation vehicles, optimizing the geographical distribution of the autonomous transportation vehicles and optimizing assignment of the autonomous transportation vehicles to users requesting services.
[0011] Document DE 10 2015 225 241 A1 describes a method in which a vehicle compares a trajectory of another vehicle driving in front to its own desired trajectory. If a similarity level of the trajectories is high enough, automated driving is used to follow the desired trajectory. If differences are high, manual driving can be used. Document DE 10 2015 225 242 A1 discloses a concept for determining a reference trajectory by a scout vehicle. The reference trajectory can be provided to following vehicles. A quality of the trajectory ultimately determines whether it is used by the following vehicles. Document DE 10 2015 213 743 A1 also describes a concept for determining a trajectory by a scout vehicle. A similarity between the environments of the scout vehicle and the following vehicles may determine whether the trajectory of the scout vehicle re-used. Document DE 10 2015 225 238 A1 discloses evaluation of a similarity of trajectories and a similarity of environments of scout and following vehicles. A safe drives mode may be activated in case of differences above a threshold.
[0012] Document US 2017/0045885 A1 describes computer devices, systems, and methods for an autonomous passenger vehicle. An unexpected driving environment can be identified, such as by using one or more processors. Information based on the unexpected driving environment received from one or more sensors disposed on the vehicle can be sent to a remote operator using a remote server. A command sent by the remote operator relating to one or more vehicle systems can be received. The command can be sent to the one or more vehicle systems for execution.
[0013] Conventional concepts consider management and organization of automated transportation vehicles. There are, however, traffic situations, which are difficult to resolve with fully automated driving algorithms. There is a demand for an improved concept for overcoming exceptional traffic situations for automated driving.
[0014] Disclosed embodiments are based on the finding that there are traffic situations, e.g., if an obstacle is in the regular way, which cannot be resolved by automated driving mechanisms. For example, if an object (parking/unloading transportation vehicle) blocks a one-way street a way passing the transportation vehicle may require driving a short section on the sidewalk. Driving on a side walk may, however, not be allowed in normal automated driving mode. Disclosed embodiments are based on the finding that once such an exceptional traffic situation is detected a communication with a network component can resolve the situation, for example, by switching to tele-operated driving or by receiving instructions on a route section that resolves the traffic situation.
[0015] Disclosed embodiments provide a method for a transportation vehicle to determine a route section. The method comprises operating the transportation vehicle in an automated driving mode and determining an exceptional traffic situation. The method further comprises transmitting information related to the exceptional traffic situation to a network component using a mobile communication system. The method further comprises receiving information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component. Disclosed embodiments may enable network assisted route adaptation in case of unexpected traffic situations for automated driving.
[0016] The receiving of the driving instructions may comprise tele-operating the transportation vehicle along the route section to overcome the exceptional traffic situation. Disclosed embodiments may enable to switch from an automated driving mode to a tele-operated driving mode in case of an unexpected traffic situation. A tele-operator or tele-driver may then remotely steer the transportation vehicle out of the traffic situation.
[0017] In some disclosed embodiments, the receiving of the driving instructions may comprise receiving information on the route section from the network component and the method may further comprise autonomously/automatically operating the transportation vehicle along the route section. Disclosed embodiments may enable a re-use of an already known route section, which are able to overcome an exceptional traffic situation.
[0018] The receiving of the driving instructions may comprise an instruction to manually operate the transportation vehicle out of the exceptional traffic situation. Hence, in some disclosed embodiments and depending on the respective exceptional traffic situation the network component may instruct a user of the transportation vehicle to manually operate the transportation vehicle. The route section is then determined by manually operating the transportation vehicle out of the exceptional traffic situation. The method may then further comprise transmitting information related to the route section to the network component. The route section may then be determined by an actual driver of the transportation vehicle and information related to the route section resolving the exceptional traffic situation can be transmitted and stored for later re-use (the same applies to route section determined by tele-operated driving).
[0019] The method may comprise providing information related to an environmental model of the transportation vehicle in addition to the information related to the exceptional traffic situation in further disclosed embodiments. Provision of information related to the environmental model may reduce the amount of other data, particularly, video data, which has to be provided to a remote operator. Disclosed embodiments may enable more efficient tele-operating of transportation vehicles through provision of environmental data. The network component, e.g., a control center for remote driving, may be able to determine the route section based on the environmental data and possibly some other data. Such other data may comprise transportation vehicle, sensor, or video data. In some disclosed embodiments the method may further comprise providing information related to transportation vehicle data and video data to the network component in addition to the information related to the exceptional traffic situation. Disclosed embodiments may enable to reduce a data rate for tele-operated or remote driving of a transportation vehicle. Sensor data of the transportation vehicle and/or the data on the environmental model may enable a reduction of video or other data which needs to be provided from the transportation vehicle to the tele-operator.
[0020] Disclosed embodiments further provide a method for a network component to determine a route section for a transportation vehicle. The method comprises receiving information related to an exceptional traffic situation from the transportation vehicle using a mobile communication system. The method further comprises obtaining information related to driving instructions for the route section to overcome the exceptional traffic situation, and transmitting the information related to the driving instructions for the route section to overcome the exceptional traffic situation to the transportation vehicle. Disclosed embodiments enable a network component to assist an automated transportation vehicle in overcoming an exceptional traffic situation.
[0021] The obtaining of the information related to the driving instructions may comprise retrieving previously stored information related to the route section from a storage. As outlined above, the previously determined information on a route section overcoming a specific exceptional traffic situation may be stored and re-used. Disclosed embodiments may provide a more signaling efficient solution for resolving a traffic situation by providing a resolving route to multiple transportation vehicles, rather than re-solving the same situation multiple times for multiple transportation vehicles. In some disclosed embodiments the obtaining of the information related to the driving instructions comprises tele-operating the transportation vehicle out of the exceptional traffic situation. Additionally or alternatively, the method may further comprise receiving information related to an environmental model of the transportation vehicle from the transportation vehicle. The obtaining of the information related to the driving instructions may then comprise determining information related to the route section based on the information related to the environmental model of the transportation vehicle. The method may further comprise storing information related to the route section in a storage. Disclosed embodiments may enable re-use of a route determined based on an environmental model of a transportation vehicle or based on a remote or tele-operator.
[0022] In some further disclosed embodiments the obtaining of the information related to the driving instructions may comprise instructing a user of the transportation vehicle to manually operate the transportation vehicle out of the exceptional traffic situation. Hence, a user of the transportation vehicle may determine the route section out of the situation by hands-on-driving the transportation vehicle. Still, the method may comprise storing information related to the route section in a storage. Disclosed embodiments may efficiently determine and re-use the route section.
[0023] Disclosed embodiments also provide an apparatus for a transportation vehicle. The transportation vehicle apparatus comprises one or more interfaces, which are configured to communicate in a mobile communication system. The transportation vehicle apparatus further comprises a control module, which is configured to control the one or more interfaces. The control module is further configured to perform one of the methods described herein. Likewise, disclosed embodiments provide an apparatus for a network component, which comprises one or more interfaces configured to communicate in a mobile communication system. The network component apparatus further comprises a control module, which is configured to control the one or more interfaces. The control module is further configured to perform one of the methods described herein.
[0024] Further disclosed embodiments are a transportation vehicle comprising a disclosed embodiment of the transportation vehicle apparatus and a network component comprising the network component apparatus.
[0025] Disclosed embodiments further provide a computer program having a program code for performing one or more of the above described methods, when the computer program is executed on a computer, processor, or programmable hardware component. A further disclosed embodiment is a computer readable storage medium storing instructions which, when executed by a computer, processor, or programmable hardware component, cause the computer to implement one of the methods described herein.
[0026] Various example embodiments will now be described more fully with reference to the accompanying drawings in which some example embodiments are illustrated. In the figures, the thicknesses of lines, layers or regions may be exaggerated for clarity. Optional components may be illustrated using broken, dashed or dotted lines.
[0027] Accordingly, while example embodiments are capable of various modifications and alternative forms, disclosed embodiments thereof are shown by way of example in the figures and will herein be described in detail. It should be understood, however, that there is no intent to limit example embodiments to the particular forms disclosed, but on the contrary, example embodiments are to cover all modifications, equivalents, and alternatives falling within the scope of the disclosure. Like numbers refer to like or similar elements throughout the description of the figures.
[0028] As used herein, the term "or" refers to a non-exclusive or, unless otherwise indicated (e.g., "or else" or "or in the alternative"). Furthermore, as used herein, words used to describe a relationship between elements should be broadly construed to include a direct relationship or the presence of intervening elements unless otherwise indicated. For example, when an element is referred to as being "connected" or "coupled" to another element, the element may be directly connected or coupled to the other element or intervening elements may be present. In contrast, when an element is referred to as being "directly connected" or "directly coupled" to another element, there are no intervening elements present. Similarly, words such as "between", "adjacent", and the like should be interpreted in a like way.
[0029] The terminology used herein is for the purpose of describing particular embodiments only and is not intended to be limiting of example embodiments. As used herein, the singular forms "a", "an" and "the" are intended to include the plural forms as well, unless the context clearly indicates otherwise. It will be further understood that the terms "comprises", "comprising", "includes" or "including", when used herein, specify the presence of stated features, integers, operations, elements or components, but do not preclude the presence or addition of one or more other features, integers, operations, elements, components or groups thereof.
[0030] Unless otherwise defined, all terms (including technical and scientific terms) used herein have the same meaning as commonly understood by one of ordinary skill in the art to which example embodiments belong. It will be further understood that terms, e.g., those defined in commonly used dictionaries, should be interpreted as having a meaning that is consistent with their meaning in the context of the relevant art and will not be interpreted in an idealized or overly formal sense unless expressly so defined herein.
[0031] FIG. 1 illustrates a block diagram of a disclosed embodiment of a method 10 a transportation vehicle to determine a route section. The method 10 comprises operating 12 the transportation vehicle in an autonomous/automated driving mode and determining 14 an exceptional traffic situation. The method 10 further comprises transmitting 16 information related to the exceptional traffic situation to a network component using a mobile communication system. The method further comprises receiving 18 information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component.
[0032] FIG. 2 illustrates a block diagram of a disclosed embodiment of a method 20 for a network component to determine a route section for a transportation vehicle. The method 20 comprises receiving 22 information related to an exceptional traffic situation from the transportation vehicle using a mobile communication system. The method 20 further comprises obtaining 24 information related to driving instructions for the route section to overcome the exceptional traffic situation. The method 20 further comprises transmitting 26 information related to the driving instructions for the route section to overcome the exceptional traffic situation to the transportation vehicle. As will be explained in more detail subsequently, examples for the information related to the driving instructions are control information from a remote-control center (tele-operated driving), information related to a stored path (determined before), which is known to overcome the unexpected traffic situation, or instructions to manually operate the transportation vehicle.
[0033] The mobile communication system 400, as shown in FIG. 3, may, for example, correspond to one of the Third Generation Partnership Project (3GPP)-standardized mobile communication networks, where the term mobile communication system is used synonymously to mobile communication network. The mobile or wireless communication system 400 may correspond to a mobile communication system of the 5th Generation (5G, or New Radio) and may use mm-Wave technology. The mobile communication system may correspond to or comprise, for example, a Long-Term Evolution (LTE), an LTE-Advanced (LTE-A), High Speed Packet Access (HSPA), a Universal Mobile Telecommunication System (UMTS) or a UMTS Terrestrial Radio Access Network (UTRAN), an evolved-UTRAN (e-UTRAN), a Global System for Mobile communication (GSM) or Enhanced Data rates for GSM Evolution (EDGE) network, a GSM/EDGE Radio Access Network (GERAN), or mobile communication networks with different standards, for example, a Worldwide Inter-operability for Microwave Access (WIMAX) network IEEE 802.16 or Wireless Local Area Network (WLAN) IEEE 802.11, generally an Orthogonal Frequency Division Multiple Access (OFDMA) network, a Time Division Multiple Access (TDMA) network, a Code Division Multiple Access (CDMA) network, a Wideband-CDMA (WCDMA) network, a Frequency Division Multiple Access (FDMA) network, a Spatial Division Multiple Access (SDMA) network, etc.
[0034] Service provision may be carried out by a network component, such as a base station transceiver, a relay station or a UE, e.g., coordinating service provision in a cluster or group of multiple UEs. Here and in the following the network component may be a Control Center (CC), which controls remotely operated or tele-operated transportation vehicles. For example, it may correspond to a computer system displaying data (e.g., video streams) obtained from a transportation vehicle to an operator or remote driver of the transportation vehicle. Generally such a CC may be located as close to a controlled transportation vehicle as possible to keep a latency of the video data in an uplink and the control or steering data in the downlink as short as possible. In some disclosed embodiments communication may be carried out via a base station, which may be collocated with the CC or located close to base station. Signaling may be routed directly from the CC to the transportation vehicle, i.e., on a shortest path to keep the latency and delay as short as possible.
[0035] A base station transceiver can be operable or configured to communicate with one or more active mobile transceivers/transportation vehicles 100 and a base station transceiver can be located in or adjacent to a coverage area of another base station transceiver, e.g., a macro cell base station transceiver or small cell base station transceiver. Hence, disclosed embodiments may provide a mobile communication system 400 comprising two or more mobile transceivers/transportation vehicles 100 and one or more base station transceivers, wherein the base station transceivers may establish macro cells or small cells, as, e.g., pico-, metro-, or femto cells. A mobile transceiver or UE may correspond to a smartphone, a cell phone, a laptop, a notebook, a personal computer, a Personal Digital Assistant (PDA), a Universal Serial Bus (USB)-stick, a car, a transportation vehicle etc. A mobile transceiver may also be referred to as User Equipment (UE) or mobile in line with the 3GPP terminology. A transportation vehicle may correspond to any conceivable mode of transportation, e.g., a car, a bike, a motorbike, a van, a truck, a bus, a ship, a boat, a plane, a train, a tram, etc.
[0036] A base station transceiver can be located in the fixed or stationary part of the network or system. A base station transceiver may be or correspond to a remote radio head, a transmission point, an access point, a macro cell, a small cell, a micro cell, a femto cell, a metro cell etc. A base station transceiver can be a wireless interface of a wired network, which enables transmission of radio signals to a UE or mobile transceiver. Such a radio signal may comply with radio signals as, for example, standardized by 3GPP or, generally, in line with one or more of the above listed systems. Thus, a base station transceiver may correspond to a NodeB, an eNodeB, a Base Transceiver Station (BTS), an access point, a remote radio head, a relay station, a transmission point etc., which may be further subdivided in a remote unit and a central unit.
[0037] A mobile transceiver 100 can be associated with a base station transceiver or cell. The term cell refers to a coverage area of radio services provided by a base station transceiver, e.g., a NodeB (NB), an eNodeB (eNB), a remote radio head, a transmission point, etc. A base station transceiver may operate one or more cells on one or more frequency layers, in some disclosed embodiments a cell may correspond to a sector. For example, sectors can be achieved using sector antennas, which provide a characteristic for covering an angular section around a remote unit or base station transceiver. In some disclosed embodiments, a base station transceiver may, for example, operate three or six cells covering sectors of 120.degree. (in case of three cells), 60.degree. (in case of six cells) respectively. A base station transceiver may operate multiple sectorized antennas. In the following a cell may represent an according base station transceiver generating the cell or, likewise, a base station transceiver may represent a cell the base station transceiver generates.
[0038] Mobile transceivers 100 may communicate directly with each other, i.e., without involving any base station transceiver, which is also referred to as Device-to-Device (D2D) communication. An example of D2D is direct communication between transportation vehicles, also referred to as Vehicle-to-Vehicle communication (V2V), car-to-car using 802.11p, Dedicated Short Range Communication (DSRC), respectively.
[0039] FIG. 3 shows a disclosed embodiment of an apparatus 30 for a UE or transportation vehicle 100, a disclosed embodiment of an apparatus 40 for a network component, and a disclosed embodiment of a system 400. The apparatus 30 for the UE/transportation vehicle 100 comprises one or more interfaces 32 configured to communicate in the mobile communication system 400. The apparatus 30 further comprises a control module 34, which is coupled to the one or more interfaces 32 and which is configured to control the one or more interfaces 32. The control module 34 is further configured to perform one of the methods 10 as described herein.
[0040] The apparatus 40 for the network component 200 comprises one or more interfaces 42, which are configured to communicate in the mobile communication system 400. The apparatus 40 further comprises a control module 44, which is coupled to the one or more interfaces 42 and which is configured to control the one or more interfaces 42. The control module 44 is further configured to perform one of the methods 20 as described herein. The apparatus 40 may be comprised in a CC, a base station, a NodeB, a UE, a relay station, or any service coordinating network entity in disclosed embodiments. It is to be noted that the term network component may comprise multiple sub-components, such as a base station, a server, a CC, etc. A further disclosed embodiment is a transportation vehicle 100 comprising the apparatus 30 and/or a network component 200 comprising the apparatus 40.
[0041] In disclosed embodiments the one or more interfaces 32, 42 may correspond to any method or mechanism for obtaining, receiving, transmitting or providing analog or digital signals or information, e.g., any connector, contact, pin, register, input port, output port, conductor, lane, etc. which allows providing or obtaining a signal or information. An interface may be wireless or wireline and it may be configured to communicate, i.e., transmit or receive signals, information with further internal or external components. The one or more interfaces 32, 42 may comprise further components to enable according communication in the mobile communication system 400, such components may include transceiver (transmitter and/or receiver) components, such as one or more Low-Noise Amplifiers (LNAs), one or more Power-Amplifiers (PAs), one or more duplexers, one or more diplexers, one or more filters or filter circuitry, one or more converters, one or more mixers, accordingly adapted radio frequency components, etc. The one or more interfaces 32, 42 may be coupled to one or more antennas, which may correspond to any transmit and/or receive antennas, such as horn antennas, dipole antennas, patch antennas, sector antennas etc. The antennas may be arranged in a defined geometrical setting, such as a uniform array, a linear array, a circular array, a triangular array, a uniform field antenna, a field array, combinations thereof, etc. In some examples the one or more interfaces 32, 42 may serve the purpose of transmitting or receiving or both, transmitting and receiving, information, such as information related to capabilities, application requirements, trigger indications, requests, message interface configurations, feedback, information related to control commands, QoS requirements, QoS time courses, QoS maps, etc.
[0042] As shown in FIG. 3 the respective one or more interfaces 32, 42 are coupled to the respective control modules 34, 44 at the apparatuses 30, 40. In disclosed embodiments the control modules 34, 44 may be implemented using one or more processing units, one or more processing devices, any method or mechanism for processing, such as a processor, a computer or a programmable hardware component being operable with accordingly adapted software. In other words, the described functions of the control modules 34, 44 may as well be implemented in software, which is then executed on one or more programmable hardware components. Such hardware components may comprise a general purpose processor, a Digital Signal Processor (DSP), a micro-controller, etc.
[0043] FIG. 3 also shows a disclosed embodiment of a system 400 comprising disclosed embodiments of UE/transportation vehicle 100, and a network component/base station 200 comprising the apparatus 40. In disclosed embodiments, communication, i.e., transmission, reception or both, may take place among mobile transceivers/transportation vehicles 100 directly and/or between mobile transceivers/transportation vehicles 100 and a network component 200 (infrastructure or mobile transceiver, e.g., a base station, a network server, a backend server, etc.). Such communication may make use of a mobile communication system 400. Such communication may be carried out directly, e.g., by Device-to-Device (D2D) communication, which may also comprise Vehicle-to-Vehicle (V2V) or car-to-car communication in case of transportation vehicles 100. Such communication may be carried out using the specifications of a mobile communication system 400.
[0044] In disclosed embodiments the one or more interfaces 32, 42 can be configured to wirelessly communicate in the mobile communication system 400. To do so, radio resources are used, e.g., frequency, time, code, and/or spatial resources, which may be used for wireless communication with a base station transceiver as well as for direct communication. The assignment of the radio resources may be controlled by a base station transceiver, i.e., the determination which resources are used for D2D and which are not. Here and in the following radio resources of the respective components may correspond to any radio resources conceivable on radio carriers and they may use the same or different granularities on the respective carriers. The radio resources may correspond to a Resource Block (RB as in LTE/LTE-A/LTE-unlicensed (LTE-U)), one or more carriers, sub-carriers, one or more radio frames, radio sub-frames, radio slots, one or more code sequences potentially with a respective spreading factor, one or more spatial resources, such as spatial sub-channels, spatial precoding vectors, any combination thereof, etc.
[0045] For example, in direct Cellular Vehicle-to-Anything (C-V2X), where V2X includes at least V2V, V2-Infrastructure (V2I), etc., transmission according to 3GPP Release 14 onward can be managed by infrastructure (so-called mode 3) or run in a UE.
[0046] FIG. 3 also illustrates the methods 10 and 20 as described above. The apparatus 30 of the transportation vehicle 100 operated the transportation vehicle 100 in automated mode 12 if an exceptional traffic situation is determined 14. Such an exceptional situation may be any traffic situation that is unexpected or differs from an expectation according to routing information or map information available in the transportation vehicle 100. For example, the road may be blocked by another transportation vehicle, a construction side, an accident, flooding etc. Other exceptions may be a closed road, a closed tunnel, unexpected road conditions etc. The transportation vehicle itself may operate multiple sensor systems capturing data of the transportation vehicle's environment. Such data may comprise video data, imaging data, radar data, lidar data (light detection and ranging), temperature data, air pressure data, radio environment data, information received from other transportation vehicles, etc. Based on this data a matching can be carried out between the assigned route for automated driving and the sensor data. In some disclosed embodiments, as will be detailed in the sequel, the captured data is used to generate an environmental model of the transportation vehicle. This model may be a digital representation of the environment of the transportation vehicle possibly including other transportation vehicles, objects, roadside infrastructure, traffic signs, pedestrians, etc. Based on this model an unexpected situation can be detected, e.g., an obstacle is detected in the way and passing the obstacle would require to pass through a forbidden area, e.g., sidewalk, opposite lane, etc. In some disclosed embodiments the exceptional situation may as well be determined by receiving a traffic message, e.g., a broadcast message from another transportation vehicle.
[0047] As further shown in FIG. 3 the transportation vehicle 100 then transmits information related to the exceptional traffic situation to the network component 200 using a mobile communication system 400. From the perspective of the network component 200 the information related to the exceptional traffic situation is received 22 from the transportation vehicle 100. At the network component 200 information related to driving instructions for the route section to overcome the exceptional traffic situation can be obtained 24. Finally, information related to the instructions can be transmitted 26 back to the transportation vehicle 100, received 18 at the transportation vehicle 100, respectively.
[0048] Disclosed embodiments may provide a concept for tele-operated driving based on a slim uplink and a locally proposed path. Tele-operated Driving (TD) is getting more and more interest. The main concept of TD is a transportation vehicle remotely driven by a control center (CC). Between CC and transportation vehicle may be a large distance. They are connected via a radio communication system (e.g., 5G, 4G . . . ) and their backhaul. In a disclosed embodiment a fully automatically driving transportation vehicle gets stopped (also referred to as SAE (Society of Automotive Engineers) level 5 (L5) transportation vehicle). For example, the automated transportation vehicle is not able to continue its planed route because it is not able to interpret the situation. FIG. 4 illustrates an exceptional traffic scenario in a disclosed embodiment, where a truck (obstacle 500) is blocking a one-way road.
[0049] It is assumed that transportation vehicles 100, 101, 102 are automated transportation vehicles (L5). They would need to drive on the sidewalk to continue their planed route. In some disclosed embodiments TD provides a solution for this scenario.
[0050] Transportation vehicles controlled via remote control are uploading high data streams in the uplink (UL) to the CC. In FIG. 4 it is assumed that the network component 200 comprises a base station (BS), the CC and some server/memory. As has been outlined above, in other disclosed embodiments these components might not be collocated but located at different locations. In this description the term network component 200 shall summarize these components as one functional entity although they may be implemented as multiple physical entities. The distance between CC and the transportation vehicle 100 may contribute to the latency of any driving instructions before reaching the transportation vehicle and any data (video, sensor, etc.) being transmitted from the transportation vehicle to the CC.
[0051] The data steams provided by a remotely or tele-operated transportation vehicle may comprise radar images, LIDAR and camera data. Close by driving cars are "seeing" the same environment around them. This redundant data is occupying a considerable amount of bandwidth in the UL. For current technologies such as 4G, the UL is expected to be a bottleneck as the network was designed to support high downlink (DL) and low UL data rates. For TD it is vice versa: high UL (sensor data) and low DL (control data). Latency is also an issue here. Furthermore, each car needs to be driven manually via remote control. This implies that many drivers and CCs are needed. In such a disclosed embodiment the receiving 18 of the driving instructions comprises tele-operating the transportation vehicle along the route section to overcome the exceptional traffic situation. Moreover, information related to an environmental model of the transportation vehicle may be provided to the network component in addition to the information related to the exceptional traffic situation. The information on the environmental model may allow decreasing a subsequent video data rate on the uplink High data rates usually needed in the UL for teleoperated driving may be decreased in disclosed embodiments. In disclosed embodiments information related to transportation vehicle data and video data (e.g., with reduced data rate) may be provided to the network component in addition to the information related to the exceptional traffic situation.
[0052] Each transportation vehicle may be controlled by one driver in the CC. Disclosed embodiments are further based on the finding that a path driven remotely by the CC might be highly redundant with the path from a car remotely driven before. At least some disclosed embodiments therefore store information related to a route information or information related to driving instructions solving an unexpected traffic situation, such that the information can be re-used later on to solve the situation for other transportation vehicles as well. In disclosed embodiments the storage or memory for storing information related to a path or a route may be any device capable of storing such information, examples are a hard drive, a flash drive, an optical storage medium, a magnetic storage medium, a solid state memory, any mass storage device, etc.
[0053] As has been described above, different options are conceivable in disclosed embodiments to determine the route section leading out of the exceptional traffic situation. For example, the CC proposes a path (route section) based on the received environmental model, transportation vehicle data and video data. The proposed path is stored on a server close to the geographical location of the path and might be used by other transportation vehicles 101, 102 after internal verification (plausibility check).
[0054] Instead of transmitting all sensor data to the CC, the transportation vehicle may upload its environmental model plus some video data in some disclosed embodiments. The proposed path may be drawn (maybe just a few points) at the CC or slowly driven by CC.
[0055] The procedure/method may be implemented as following in a further disclosed embodiment:
[0056] 1. Fist an automated car 100 stops and it calls the CC 200;
[0057] 2. If there is not a proposed path at local server, it gets connected with the CC;
[0058] 3. Car 100 transmits the environmental model (also German "Umfeldmodell (UMF)") and video data to the CC 200;
[0059] 4. There are multiple options for determining the proposed path or route section;
[0060] a) The CC 200 drives car 100 remotely and creates the proposed path (for next car 101, 102). The obtaining 24 of the information related to the driving instructions comprises tele-operating the transportation vehicle out of the exceptional traffic situation. This can be also based on transmitted environmental model data.
[0061] b) car 100 is driving by itself based on the proposed path (drawn with UMF+video by the CC 200). In this case the receiving 18 of the driving instructions comprises receiving information on the route section from the network component 200 and the method 10 comprises automatically operating the transportation vehicle along the route section. The method 20 further comprises receiving information related to an environmental model of the transportation vehicle from the transportation vehicle 100. The obtaining 24 of the information related to the driving instructions comprises determining information related to the route section based on the information related to the environmental model of the transportation vehicle.
[0062] c) the receiving 18 of the driving instructions comprises an instruction to manually operate the transportation vehicle out of the exceptional traffic situation. The route section is determined by manually operating the transportation vehicle out of the exceptional traffic situation. The method 10 further comprises transmitting information related to the route section to the network component. From the perspective of the network component 200 the obtaining 24 of the information related to the driving instructions comprises instructing a user of the transportation vehicle to manually operate the transportation vehicle 100 out of the exceptional traffic situation;
[0063] 5. In all cases the proposed/determined path is stored or updated at a server close to the location of the path/route section. Hence, the method 20 at the network component 200 further comprises storing information related to the route section in a storage/memory. The obtaining 24 of method 20 of the information related to the driving instructions may comprise retrieving previously stored information related to the route section from the storage/memory. The method 20 further comprises storing information related to the route section in a storage/memory;
[0064] 6. Car 100 left the area and now car 101 is located at the old position of car 100;
[0065] 7. The second car (car 101) is also calling the CC 200 but is connected with the server as there is a proposed path. Car 101 gets the proposed path from the server;
[0066] 8. FIG. 5 shows a model of the autopilot plus new input from the communication in a disclosed embodiment. FIG. 5 illustrates disclosed embodiments of a transportation vehicle 100 and a network component 200. Car 3 (102 in FIG. 4) is used as an example. As shown in FIG. 5 the apparatus 30 for the transportation vehicle 100 comprises a control module 34, which generates the UMF, carries out maneuver planning and controls/steers the transportation vehicle. The control module 34 receives different input data, e.g., ego data (from the transportation vehicle, e.g., engine data, brake data, tire data, component data), sensor data (radar, lidar, video), map data, etc. The apparatus 30 further comprises one or more interfaces 32, which are configured to wirelessly communicate with a network component 200 in the present disclosed embodiment. The network component 200 may be implemented in a distributed way and it may comprise a base station, a server, and a CC. In the present disclosed embodiment the car 100 is receiving the proposed path (route section overcoming the unexpected traffic situation) from the server as part of the network component 200. The maneuver planning (MP) in the control module 34 of the car 100 needs to compare the proposed path with its own conditions. It either uses the proposed path or may reject it and gets connected with the CC in this disclosed embodiment.
[0067] The automated transportation vehicle 100 gets a proposed path, this means it can accept it after internal evaluation or it might reject it. The CC draws this path based on the environmental model and the video data (slim uplink) or creates it when driving the path with the first car 100 remotely.
[0068] For example, transportation vehicle 100 may provide the following content or conditions to the network component 200: [0069] geographical position of path [0070] distance from path to obstacles (width of the new lane) [0071] time stamp [0072] further environmental information
[0073] Disclosed embodiments may enable a slim uplink, i.e., reduced uplink data for remote or tele-operated driving. This may be achieved by transmitting the environmental model (UMF), transportation vehicle data (e.g., height, width, weight, . . . ) and video data in the uplink instead of transmitting more data like radar, lidar and other sensor data. In disclosed embodiments a tele-operated driving server (TD server) may be used and the CC may store a proposed path. The server may be located close to the geographical position of the proposed path to reduce latency. The TD server could also be located at a car or in infrastructure like traffic lights and shared via side-link.
[0074] FIG. 6 shows another exceptional traffic scenario in a disclosed embodiment. FIG. 6 shows a highway scenario with a construction site 500. Vehicle hV1 (highway transportation vehicle 1) 100 has determined a path around the obstacle 500, which is locally stored at the network component 200 (e.g., base station, local server, road side unit, CC, etc.). For example, the stored path has been determined by tele-operated driving or manually driving the transportation vehicle 100 through the construction side 500. The following transportation vehicles hV2, hV3 101, 102 can then use the proposed stored path. Disclosed embodiments may provide an efficient concept for guiding a plurality of transportation vehicles around an obstacle 500 by re-using a path determined by a first transportation vehicle 100 for other transportation vehicles 101, 102 subsequently passing the same obstacle 500.
[0075] In the disclosed embodiment illustrated by FIG. 6 the automated transportation vehicle hV1 100 had troubles to drive through the construction site 500. Therefore, it was helped by the control center (CC) 200 via remote control. The driven path and more collected data (sensor data) from hV1 100 are sent via the radio channel and stored locally at a server at BS/RSU 200 in form of a proposed path. hV2 and hV3 101, 102 are approaching this area and may use the proposed path from the server. When/if they can use this proposed path, they do not need to call the CC and tele-operated driving becomes scalable for more users. The locally stored proposed path may be stored in server/memory. Storing locally the proposed path may solve a scalability problem and reduce communication traffic. If more cars need to be driven through this critical area just the first one is controlled by the CC and the following may use the locally stored proposed path. It may be stored at the BS, RSU or even at another transportation vehicle and shared via sidelink. In the later scenario the network component 200 can be in a transportation vehicle, e.g., transportation vehicle 100, sharing the information on the route section with other transportation vehicles 101, 102 via direct communication, e.g., PC5 or 3GPP sidelink.
[0076] As already mentioned, in disclosed embodiments the respective methods may be implemented as computer programs or codes, which can be executed on a respective hardware. Hence, another disclosed embodiment is a computer program having a program code for performing at least one of the above methods, when the computer program is executed on a computer, a processor, or a programmable hardware component. A further disclosed embodiment is a (non-transitory) computer readable storage medium storing instructions which, when executed by a computer, processor, or programmable hardware component, cause the computer to implement one of the methods described herein.
[0077] A person of skill in the art would readily recognize that operations of various above-described methods can be performed by programmed computers, for example, positions of slots may be determined or calculated. Herein, some disclosed embodiments are also intended to cover program storage devices, e.g., digital data storage media, which are machine or computer readable and encode machine-executable or computer-executable programs of instructions where the instructions perform some or all of the operations of methods described herein. The program storage devices may be, e.g., digital memories, magnetic storage media such as magnetic disks and magnetic tapes, hard drives, or optically readable digital data storage media. The disclosed embodiments are also intended to cover computers programmed to perform the operations of methods described herein or (field) programmable logic arrays ((F)PLAs) or (field) programmable gate arrays ((F)PGAs), programmed to perform the operations of the above-described methods.
[0078] The description and drawings merely illustrate the principles of the disclosure. It will thus be appreciated that those skilled in the art will be able to devise various arrangements that, although not explicitly described or shown herein, embody the principles of the disclosure and are included within its spirit and scope. Furthermore, all examples recited herein are principally intended expressly to be only for pedagogical purposes to aid the reader in understanding the principles of the disclosure and the concepts contributed to furthering the art, and are to be construed as being without limitation to such specifically recited examples and conditions. Moreover, all statements herein reciting principles and embodiments of the disclosure, as well as specific examples thereof, are intended to encompass equivalents thereof.
[0079] When provided by a processor, the functions may be provided by a single dedicated processor, by a single shared processor, or by a plurality of individual processors, some of which may be shared. Moreover, explicit use of the term "processor" or "controller" should not be construed to refer exclusively to hardware capable of executing software, and may implicitly include, without limitation, Digital Signal Processor (DSP) hardware, network processor, application specific integrated circuit (ASIC), field programmable gate array (FPGA), read only memory (ROM) for storing software, random access memory (RAM), and non-volatile storage. Other hardware, conventional or custom, may also be included. Their function may be carried out through the operation of program logic, through dedicated logic, through the interaction of program control and dedicated logic, or even manually, the particular technique being selectable by the implementer as more specifically understood from the context.
[0080] It should be appreciated by those skilled in the art that any block diagrams herein represent conceptual views of illustrative circuitry embodying the principles of the disclosure. Similarly, it will be appreciated that any flow charts, flow diagrams, state transition diagrams, pseudo code, and the like represent various processes which may be substantially represented in computer readable medium and so executed by a computer or processor, whether or not such computer or processor is explicitly shown.
[0081] It is further to be noted that methods disclosed in the specification or in the claims may be implemented by a device having a way for performing each of the respective operations of these methods.
LIST OF REFERENCE SIGNS
[0082] 10 method for a transportation vehicle [0083] 12 operating the transportation vehicle in an autonomous/automated driving mode [0084] 14 determining an exceptional traffic situation [0085] 16 transmitting information related to the exceptional traffic situation to a network component using a mobile communication system [0086] 18 receiving information related to driving instructions for the route section to overcome the exceptional traffic situation from the network component [0087] 20 method for a network component [0088] 22 receiving information related to an exceptional traffic situation from the transportation vehicle using a mobile communication system [0089] 24 obtaining information related to driving instructions for the route section to overcome the exceptional traffic situation [0090] 26 transmitting information related to the driving instructions for the route section to overcome the exceptional traffic situation to the transportation vehicle [0091] 30 apparatus for transportation vehicle [0092] 32 one or more interfaces [0093] 34 control module [0094] 40 apparatus for network component [0095] 42 one or more interfaces [0096] 44 control module [0097] 100 transportation vehicle [0098] 101 transportation vehicle [0099] 102 transportation vehicle [0100] 200 network component [0101] 400 mobile communication system [0102] 500 obstacle (truck, construction site)
* * * * *
D00000
D00001
D00002
D00003
D00004
D00005
D00006
XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.