Track System For Traction Of A Vehicle
DANDURAND; Jules ; et al.
U.S. patent application number 16/516435 was filed with the patent office on 2020-03-19 for track system for traction of a vehicle. The applicant listed for this patent is CAMSO INC.. Invention is credited to Jules DANDURAND, Jason DAVIS, Pascal LABBE, Daniel LOCHNIKAR.
| Application Number | 20200086935 16/516435 |
| Document ID | / |
| Family ID | 59270795 |
| Filed Date | 2020-03-19 |











View All Diagrams
| United States Patent Application | 20200086935 |
| Kind Code | A1 |
| DANDURAND; Jules ; et al. | March 19, 2020 |
TRACK SYSTEM FOR TRACTION OF A VEHICLE
Abstract
A track system for traction of a vehicle (e.g., a snowmobile, an all-terrain vehicle (ATV) etc.). The track system comprises a track and a track-engaging assembly for driving and guiding the track around the track-engaging assembly. The track system may have various features to enhance its traction, floatation, and/or other aspects of its performance, including, for example, a lightweight design, enhanced tractive effects, an enhanced heat management capability, an enhanced resistance to lateral skidding (e.g., on a side hill), an adaptive capability to adapt itself to different conditions (e.g., ground conditions, such as different types of snow, soil, etc.; and/or other conditions), an adjustability of a contact area of its track with the ground, and/or other features.
| Inventors: | DANDURAND; Jules; (SHERBROOKE, CA) ; LABBE; Pascal; (Sherbrooke, CA) ; DAVIS; Jason; (Cadyville, NY) ; LOCHNIKAR; Daniel; (Gunnison, CO) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Family ID: | 59270795 | ||||||||||
| Appl. No.: | 16/516435 | ||||||||||
| Filed: | July 19, 2019 |
Related U.S. Patent Documents
| Application Number | Filing Date | Patent Number | ||
|---|---|---|---|---|
| 15400692 | Jan 6, 2017 | 10392060 | ||
| 16516435 | ||||
| 62275944 | Jan 7, 2016 | |||
| 62337101 | May 16, 2016 | |||
| Current U.S. Class: | 1/1 |
| Current CPC Class: | B62M 27/02 20130101; B62D 55/07 20130101; B62D 55/14 20130101; B62D 55/10 20130101; B62D 55/27 20130101; B62M 2027/027 20130101; B62D 55/244 20130101; B62D 55/104 20130101 |
| International Class: | B62D 55/24 20060101 B62D055/24; B62M 27/02 20060101 B62M027/02; B62D 55/27 20060101 B62D055/27; B62D 55/14 20060101 B62D055/14; B62D 55/104 20060101 B62D055/104; B62D 55/10 20060101 B62D055/10; B62D 55/07 20060101 B62D055/07 |
Claims
1. A track for traction of a vehicle, the track being movable around a track-engaging assembly comprising a drive wheel to drive the track, the track comprising: a carcass comprising a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface; wherein: a thickness of the carcass from the ground-engaging outer surface to the inner surface is no more than 0.20 inches; and a ratio of a widthwise rigidity of the carcass over a longitudinal rigidity of the carcass is at least 1.5.
2. The track of claim 1, wherein the thickness of the carcass is no more than 0.18 inches.
3. The track of claim 1, wherein the thickness of the carcass is no more than 0.16 inches.
4. The track of claim 1, wherein the ratio of the widthwise rigidity of the carcass over the longitudinal rigidity of the carcass is at least 2.
5. (canceled)
6. The track of claim 1, wherein the ratio of the widthwise rigidity of the carcass over the longitudinal rigidity of the carcass is at least 3.
7. The track of claim 1, wherein: the carcass comprises elastomeric material and a reinforcement disposed within the elastomeric material; and a ratio of a bending stiffness of the reinforcement in a widthwise direction of the track over a bending stiffness of the reinforcement in a longitudinal direction of the track is at least 2.
8. The track of claim 7, wherein the ratio of the bending stiffness of the reinforcement in the widthwise direction of the track over the bending stiffness of the reinforcement in the longitudinal direction of the track is at least 3.
9. The track of claim 7, wherein the ratio of the bending stiffness of the reinforcement in the widthwise direction of the track over the bending stiffness of the reinforcement in the longitudinal direction of the track is at least 4.
10. The track of claim 7, wherein the ratio of the bending stiffness of the reinforcement in the widthwise direction of the track over the bending stiffness of the reinforcement in the longitudinal direction of the track is at least 5.
11. The track of claim 7, wherein the reinforcement comprises a layer of reinforcing cables.
12. The track of claim 7, wherein the reinforcement comprises a layer of reinforcing fabric.
13. The track of claim 1, wherein: the carcass comprises elastomeric material and a reinforcement disposed within the elastomeric material; a ratio of a modulus of elasticity of the reinforcement in a longitudinal direction of the track over the thickness of the track is at least 1 GPa/in; and a ratio of a modulus of elasticity of the reinforcement in a widthwise direction of the track over the thickness of the track is at least 5 GPa/in.
14.-40. (canceled)
41. A track for traction of a vehicle, the track being movable around a track-engaging assembly comprising a drive wheel to drive the track, the track comprising: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; a plurality of traction projections projecting from the ground-engaging outer surface; and a plurality of slide members for sliding against the track-engaging assembly; wherein a spacing of longitudinally-adjacent ones of the slide members in a longitudinal direction of the track is at least one-fifth of a length of the track.
42. The track of claim 41, wherein the spacing of longitudinally-adjacent ones of the slide members in the longitudinal direction of the track is at least one-quarter of the length of the track.
43. The track of claim 41, wherein the spacing of longitudinally-adjacent ones of the slide members in the longitudinal direction of the track is at least one-third of the length of the track.
44. The track of claim 41, wherein the spacing of longitudinally-adjacent ones of the slide members in the longitudinal direction of the track is at least half of the length of the track.
45. The track of claim 41, wherein the slide members are arranged such that no more than three of the slide members can contact the track-engaging assembly at any given instant.
46. The track of claim 41, wherein the slide members are arranged such that no more than two of the slide members can contact the track-engaging assembly at any given instant.
47. The track of claim 41, wherein the slide members are arranged such that no more than one of the slide members can contact the track-engaging assembly at any given instant.
48.-59. (canceled)
60. A track for traction of a vehicle, the track being movable around a track-engaging assembly comprising a drive wheel to drive the track, the track comprising: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; a plurality of traction projections projecting from the ground-engaging outer surface; and a plurality of drive/guide projections projecting from the inner surface; wherein a spacing of adjacent ones of traction projections in a longitudinal direction of the track is greater than a spacing of adjacent ones of the drive/guide projections in the longitudinal direction of the track.
61.-188. (canceled)
Description
CROSS-REFERENCE TO RELATED APPLICATION
[0001] This application claims priority from U.S. Provisional Patent Application 62/275,944 filed on Jan. 7, 2016 and incorporated by reference herein and from U.S. Provisional Patent Application 62/337,101 filed on May 5, 2016 and incorporated by reference herein.
FIELD
[0002] The invention relates generally to track systems for traction of vehicles such as snowmobiles, all-terrain vehicles (ATVs), and other off-road vehicles.
BACKGROUND
[0003] Certain vehicles may be equipped with track systems which enhance their traction and floatation on soft, slippery and/or irregular grounds (e.g., snow, ice, soil, mud, sand, etc.) on which they operate.
[0004] For example, snowmobiles allow efficient travel on snowy and in some cases icy grounds. A snowmobile comprises a track system which engages the ground to provide traction. The track system comprises a track-engaging assembly and a track that moves around the track-engaging assembly and engages the ground to generate traction. The track typically comprises an elastomeric body in which are embedded certain reinforcements, such as transversal stiffening rods providing transversal rigidity to the track, longitudinal cables providing tensional strength, and/or fabric layers. The track-engaging assembly comprises wheels and in some cases slide rails around which the track is driven.
[0005] A snowmobile, including its track system, may face a number of challenges while riding. For example, the snowmobile's track may perform very differently on different ground conditions. For instance, the track may perform properly on a given type of snow condition (e.g., deep powder snow) but may not perform as well on another type of snow (e.g., packed snow). This inconsistent performance of the track in different ground conditions can be inconvenient and/or make it difficult to travel efficiently over different types of terrain. Also, the snowmobile may have an undesirable tendency to skid sideways when travelling in a given direction on a slope terrain like a side hill or other inclined ground area. A weight of the track system may also affect the snowmobile's power consumption and/or ride. Excessive heat generated within the snowmobile's track may cause deterioration and/or failure of the track.
[0006] Similar considerations may arise for track systems of other types of off-road vehicles (e.g., all-terrain vehicles (ATVs), agricultural vehicles, or other vehicles that travel on uneven grounds) in certain situations.
[0007] For these and other reasons, there is a need to improve track systems for traction of vehicles.
SUMMARY
[0008] In accordance with various aspects of the invention, there is provided a track system for traction of a vehicle. The track system comprises a track and a track-engaging assembly for driving and guiding the track around the track-engaging assembly. The track system may have various features to enhance its traction, floatation, and/or other aspects of its performance, including, for example, a lightweight design, enhanced tractive effects, an enhanced heat management capability, an enhanced resistance to lateral skidding (e.g., on a side hill), an adaptive capability to adapt itself to different conditions (e.g., ground conditions, such as different types of snow, soil, etc.; and/or other conditions), an adjustability of a contact area of its track with the ground, and/or other features.
[0009] For example, in accordance with an aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a carcass comprising a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. A thickness of the carcass from the ground-engaging outer surface to the inner surface is no more than 0.20 inches, and a ratio of a widthwise rigidity of the carcass over a longitudinal rigidity of the carcass is at least 1.5.
[0010] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a carcass comprising a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. The track comprises first elastomeric material and second elastomeric material less dense than the first elastomeric material.
[0011] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; a plurality of traction projections projecting from the ground-engaging outer surface; and a plurality of slide members for sliding against the track-engaging assembly. A spacing of longitudinally-adjacent ones of the slide members in a longitudinal direction of the track is at least one-fifth of a length of the track.
[0012] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. Longitudinally-successive ones of the traction projections that succeed one another in a longitudinal direction of the track differ in height.
[0013] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. Each traction projection comprises a recess defining a recessed area at a base of the traction projection.
[0014] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; a plurality of traction projections projecting from the ground-engaging outer surface; and a plurality of drive/guide projections projecting from the inner surface. A spacing of adjacent ones of traction projections in a longitudinal direction of the track is greater than a spacing of adjacent ones of the drive/guide projections in the longitudinal direction of the track.
[0015] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; a plurality of traction projections projecting from the ground-engaging outer surface; and a plurality of lateral stabilizers projecting from the ground-engaging outer surface to oppose a tendency of the track to skid transversely to a direction of motion of the vehicle.
[0016] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. The track comprises uneven surfaces projecting from the ground-engaging outer surface and having a texture to oppose a tendency of the track to skid transversely to a direction of motion of the vehicle.
[0017] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. Each traction projection comprises a containment space to contain ground matter when the traction projection engages the ground.
[0018] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. Each traction projection comprises a containment space to contain ground matter when the traction projection engages the ground. The containment space of the traction projection comprises a plurality of containment voids to contain respective portions of the ground matter.
[0019] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. Each traction projection is configured to scoop and compact ground matter when the traction projection engages the ground.
[0020] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. A component of the track is adaptable in response to a stimulus such that a state of the component of the track is variable in different conditions.
[0021] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track is movable around a track-engaging assembly comprising a drive wheel to drive the track. The track comprises: a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a plurality of traction projections projecting from the ground-engaging outer surface. Each traction projection is adaptable in response to a stimulus such that a state of the traction projection is variable in different conditions.
[0022] In accordance with another aspect of the invention, there is provided a track for traction of a vehicle. The track system comprises: a track comprising a ground-engaging outer surface for engaging the ground and an inner surface opposite to the ground-engaging outer surface; and a track-engaging assembly for driving and guiding the track around the track-engaging assembly. The track-engaging assembly comprises: a drive wheel configured to drive the track; and an adjustment mechanism configured to change a configuration of the track-engaging assembly in order to vary a size of a contact patch of the track with the ground.
[0023] These and other aspects of the invention will now become apparent to those of ordinary skill in the art upon review of the following description of embodiments of the invention in conjunction with the accompanying drawings.
BRIEF DESCRIPTION OF THE DRAWINGS
[0024] A detailed description of embodiments of the invention is provided below, by way of example only, with reference to the accompanying drawings, in which:
[0025] FIG. 1 shows an example of a snowmobile comprising a track system in accordance with an embodiment of the invention;
[0026] FIG. 2 shows a side view of the track system;
[0027] FIG. 3 shows a perspective view of a track-engaging assembly of the track system;
[0028] FIGS. 4 to 7 respectively show a perspective view, a plan view, an elevation view, and a longitudinal cross-sectional view of part of a track of the track system;
[0029] FIG. 8A shows a widthwise cross-sectional view of part of the track;
[0030] FIG. 8B shows a widthwise cross-sectional view of part of the track in accordance to another embodiment;
[0031] FIG. 9 shows a three-point bending test being performed on a carcass of the track along a widthwise direction of the track and along a longitudinal direction of the track;
[0032] FIG. 10 shows a widthwise cross-sectional view of part of the track in which reinforcements are spaced apart significantly in a height direction of the track;
[0033] FIG. 11 shows a longitudinal cross-sectional view of part of the track in which reinforcements are spaced apart significantly in the height direction of the track;
[0034] FIG. 12 shows an example of an embodiment in which the track comprises a low-density elastomeric material and a high-density elastomeric material;
[0035] FIG. 13A shows a longitudinal cross-sectional view of the track of FIG. 12 and FIG. 13B shows a close-up view of part of the carcass of the track of FIG. 13A;
[0036] FIG. 14 shows a widthwise cross-sectional view of the track of FIG. 12;
[0037] FIG. 15 shows a plurality of higher-density elastomeric materials of the track in accordance with another embodiment;
[0038] FIG. 16 shows the lower-density elastomeric material forming part of a periphery of the track in accordance with another embodiment;
[0039] FIG. 17 shows a longitudinal cross-sectional view of part of the track including a slide member of a plurality of slide members;
[0040] FIG. 18 shows a longitudinal cross-sectional view of part of the track in accordance with an embodiment in which the track comprises a reduced number of slide members;
[0041] FIG. 19 shows a longitudinal cross-sectional view of part of the track of FIG. 18 illustrating a spacing between longitudinally-adjacent ones of the slide members;
[0042] FIG. 20 shows a longitudinal cross-sectional view of part of the track in accordance with another embodiment in which traction projections of the track have different characteristics to generate different tractive effects on the ground;
[0043] FIGS. 21 and 22 show a perspective view and a top view of a cross-section of the traction projections of the track in accordance with another embodiment;
[0044] FIG. 23 shows a longitudinal cross-sectional view of part of the track in accordance with another embodiment in which a pitch of traction projections is greater than a pitch of drive/guide lugs of the track;
[0045] FIG. 24 shows a longitudinal cross-sectional view of part of the track in accordance with another embodiment in which the pitch of adjacent traction projections is variable;
[0046] FIG. 25 shows an embodiment of the track in which the track opposes a tendency of the track to skid sideways when the snowmobile is travelling in a given direction;
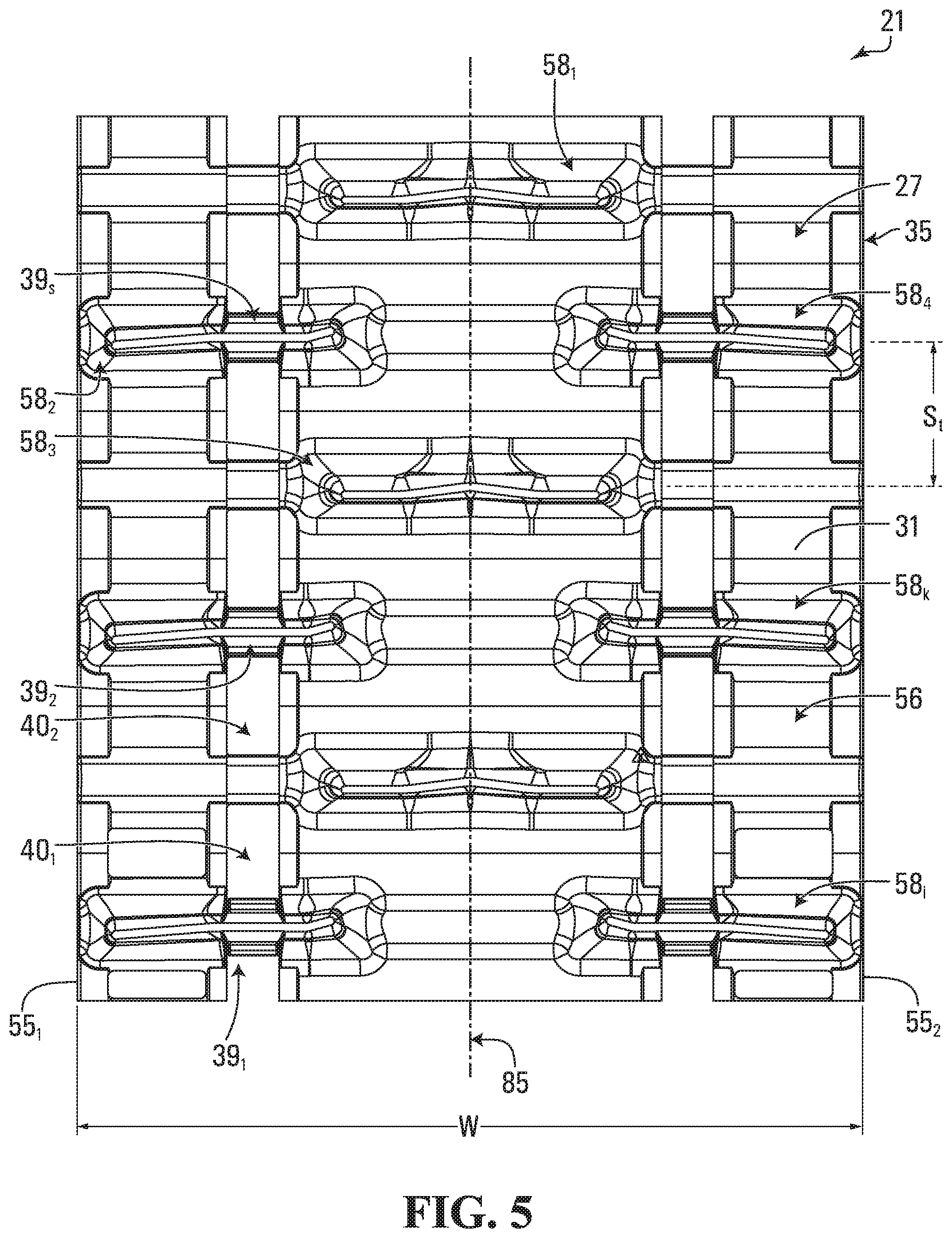
[0047] FIG. 26 shows a plan view of the ground-engaging outer side of the track of FIG. 25, including a plurality of lateral stabilizers of the track;
[0048] FIG. 27 shows a perspective view of a lateral stabilizer of the plurality of lateral stabilizers of FIG. 26;
[0049] FIGS. 28 to 32 show plan views of the ground-engaging side of the track in accordance with different embodiments in which the lateral stabilizers are configured differently on the track;
[0050] FIG. 33 shows an elevation view of the track in accordance with an embodiment in which the ground-engaging outer side of the track comprises uneven surfaces;
[0051] FIG. 34 shows an elevation view of the track in accordance with an embodiment in which the lateral stabilizers of the track comprise the uneven surfaces;
[0052] FIGS. 35A to 35D show different examples of formations of a texture of the uneven surfaces of FIGS. 33 and 34;
[0053] FIG. 36 shows a perspective view of part of a traction projection comprising an uneven lateral surface;
[0054] FIG. 37 shows a top portion of a traction projection comprising an uneven lateral surface;
[0055] FIG. 38 shows the uneven lateral surface of the traction projection bending;
[0056] FIG. 39 shows a functional block diagram of an adaptable function of the track in accordance to an embodiment where one or more components of the track are adaptable in response to a stimulus;
[0057] FIG. 40 shows the traction projections of the track of FIG. 39, the traction projections assuming a first state corresponding to a first condition and a second state corresponding to a second condition;
[0058] FIG. 41 shows an embodiment where a stiffness of a traction projection is adaptable in response to the stimulus;
[0059] FIG. 42 shows a material of the traction projections of FIG. 41 in accordance with an embodiment;
[0060] FIG. 43 shows an adaptable member of a traction projection in accordance with another embodiment;
[0061] FIG. 44 shows the adaptable member at an outer surface of the traction projection;
[0062] FIG. 45 shows an embodiment where a shape of the traction projections is adaptable to the stimulus;
[0063] FIGS. 46 and 47 show a portion of a traction projection having an angular orientation that is different in powder snow than in wet/spring snow;
[0064] FIG. 48 shows a traction projection in accordance with another embodiment where the traction projection comprises a shape-changing member to change the shape of the traction projection in response to the stimulus;
[0065] FIG. 49 shows an embodiment where the shape-changing member comprises an actuator to change a shape of the shape-changing member in response to a signal;
[0066] FIG. 50 shows an example of an embodiment of a device within the track that transmits the signal to the shape-changing member;
[0067] FIG. 51 shows an example of an embodiment in which the track system comprises an adjustment mechanism for changing a configuration of the track-engaging assembly of the track system;
[0068] FIG. 52 shows the adjustment mechanism according to an embodiment in which the adjustment mechanism can change the configuration of the track-engaging assembly while a length of the track remains constant;
[0069] FIGS. 53 to 57 show an example of an embodiment of the track in which the track comprises an adjustment mechanism to adjust the length of the track;
[0070] FIGS. 58 and 59 show an example of a connection member of a connector of the adjustment mechanism of FIGS. 53 to 57;
[0071] FIG. 60 shows a diagram depicting an adjustment command inputted the adjustment mechanism in order to adjust the configuration of the track-engaging assembly;
[0072] FIG. 61 shows a diagram depicting a user interface of the adjustment mechanism with which the user interacts to input the adjustment command;
[0073] FIG. 62 shows the user interface of the adjustment mechanism;
[0074] FIGS. 63 to 66 show an example of an embodiment of the adjustment mechanism in which the adjustment mechanism is manually operated;
[0075] FIGS. 67 and 68 show examples of an actuator of the adjustment mechanism of FIG. 63;
[0076] FIG. 69 shows a diagram depicting a controller of the adjustment mechanism for automatically generating the adjustment command;
[0077] FIG. 70 shows an example of an embodiment in which the adjustment mechanism comprises the controller and an automatic adjustment system for automatically adjusting the configuration of the track-engaging assembly;
[0078] FIG. 71 shows an example of an embodiment of the controller of the adjustment mechanism, including a sensor and a processing apparatus;
[0079] FIG. 72 shows an example of an embodiment of the sensor of the controller;
[0080] FIG. 73 shows an example of an embodiment of the processing apparatus of the controller;
[0081] FIG. 74 shows a diagram depicting interactions between the sensor, the processing apparatus and an actuator of the adjustment mechanism;
[0082] FIG. 75 shows an example of an embodiment of the actuator of the automatic adjustment system;
[0083] FIG. 76 shows an example of an embodiment in which the controller is part of a communication device;
[0084] FIGS. 77 and 78 show an example of an embodiment in which the adjustment mechanism is configured to change the configuration of the track-engaging assembly using one or more tools;
[0085] FIGS. 79 and 80 show perspective and plan views of the track in accordance with an embodiment in which the traction projections of the track comprise lateral stabilizers and a containment space; and
[0086] FIG. 81 shows a perspective view of a traction projection in accordance with the embodiment of FIGS. 79 and 80;
[0087] FIG. 82 shows a top view of a traction projection in accordance with the variant of FIGS. 79 and 80;
[0088] FIG. 83 shows a volume of a containment space of the traction projection of FIG. 81;
[0089] FIGS. 84 and 85 show side and top views of the traction projection of FIG. 81;
[0090] FIGS. 86 and 87 show perspective and plan views of the track in accordance with another embodiment in which the traction projections of the track comprise lateral stabilizers and a containment space; and
[0091] FIGS. 88 and 89 show front and rear perspective views of a traction projection in accordance with the embodiment of FIGS. 86 and 87.
[0092] It is to be expressly understood that the description and drawings are only for the purpose of illustrating certain embodiments of the invention and are an aid for understanding. They are not intended to be a definition of the limits of the invention.
DETAILED DESCRIPTION OF EMBODIMENTS
[0093] FIG. 1 shows an example of a tracked vehicle 10 in accordance with an embodiment of the invention. In this embodiment, the vehicle 10 is a snowmobile. The snowmobile 10 is designed for travelling on snow and in some cases ice. The snowmobile 10 comprises a frame 11, a powertrain 12, a track system 14, a ski system 17, a seat 18, and a user interface 20, which enables a user to ride, steer and otherwise control the snowmobile 10.
[0094] As further discussed below, in this embodiment, the track system 14 may have various features to enhance its traction, floatation, and/or other aspects of its performance, including, for example, a lightweight design, enhanced tractive effects, an enhanced heat management capability, an enhanced resistance to lateral skidding (e.g., on a side hill), an adaptive capability to adapt itself to different conditions (e.g., ground conditions, such as different types of snow, soil, etc.; and/or other conditions), an adjustability of its contact area with the ground, and/or other features.
[0095] The powertrain 12 is configured for generating motive power and transmitting motive power to the track system 14 to propel the snowmobile 10 on the ground. To that end, the powertrain 12 comprises a prime mover 15, which is a source of motive power that comprises one or more motors (e.g., an internal combustion engine, an electric motor, etc.). For example, in this embodiment, the prime mover 15 comprises an internal combustion engine. In other embodiments, the prime mover 15 may comprise another type of motor (e.g., an electric motor) or a combination of different types of motor (e.g., an internal combustion engine and an electric motor). The prime mover 15 is in a driving relationship with the track system 14. That is, the powertrain 12 transmits motive power from the prime mover 15 to the track system 14 in order to drive (i.e., impart motion to) the track system 14.
[0096] The ski system 17 is turnable to allow steering of the snowmobile 10. In this embodiment, the ski system 17 comprises a pair of skis 191, 192 connected to the frame 11 via a ski-supporting assembly 13.
[0097] The seat 18 accommodates the user of the snowmobile 10. In this case, the seat 18 is a straddle seat and the snowmobile 10 is usable by a single person such that the seat 18 accommodates only that person driving the snowmobile 10. In other cases, the seat 18 may be another type of seat, and/or the snowmobile 10 may be usable by two individuals, namely one person driving the snowmobile 10 and a passenger, such that the seat 18 may accommodate both of these individuals (e.g., behind one another) or the snowmobile 10 may comprise an additional seat for the passenger.
[0098] The user interface 20 allows the user to interact with the snowmobile 10 to control the snowmobile 10. More particularly, the user interface 20 comprises an accelerator, a brake control, and a steering device that are operated by the user to control motion of the snowmobile 10 on the ground. In this case, the steering device comprises handlebars, although it may comprise a steering wheel or other type of steering element in other cases. The user interface 20 also comprises an instrument panel (e.g., a dashboard) which provides indicators (e.g., a speedometer indicator, a tachometer indicator, etc.) to convey information to the user.
[0099] The track system 14 engages the ground to generate traction for the snowmobile 10. With additional reference to FIGS. 2 and 3, the track system 14 comprises a track 21 and a track-engaging assembly 24 for driving and guiding the track 21 around the track-engaging assembly 24. More particularly, in this embodiment, the track-engaging assembly 24 comprises a frame 23 and a plurality of track-contacting wheels which includes a plurality of drive wheels 22.sub.1, 22.sub.2 and a plurality of idler wheels that includes rear idler wheels 26.sub.1, 26.sub.2, lower roller wheels 28.sub.1-28.sub.6, and upper roller wheels 30.sub.1, 30.sub.2. As it is disposed between the track 21 and the frame 11 of the snowmobile 10, the track-engaging assembly 24 can be viewed as implementing a suspension for the snowmobile 10. The track system 14 has a longitudinal direction and a first longitudinal end and a second longitudinal end that define a length of the track system 14, a widthwise direction and a width that is defined by a width of the track 21, and a height direction that is normal to its longitudinal direction and its widthwise direction.
[0100] The track 21 engages the ground to provide traction to the snowmobile 10. A length of the track 21 allows the track 21 to be mounted around the track-engaging assembly 24. In view of its closed configuration without ends that allows it to be disposed and moved around the track-engaging assembly 24, the track 21 can be referred to as an "endless" track. With additional reference to FIGS. 4 to 7, the track 21 comprises an inner side 25 for facing the track-engaging assembly 24 and a ground-engaging outer side 27 for engaging the ground. A top run 65 of the track 21 extends between the longitudinal ends of the track system 14 and over the track-engaging assembly 24 (including over the wheels 22.sub.1, 22.sub.2, 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2), and a bottom run 66 of the track 21 extends between the longitudinal ends of the track system 14 and under the track-engaging assembly 24 (including under the wheels 22.sub.1, 22.sub.2, 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2). The bottom run 66 of the track 11 defines an area of contact 59 of the track 21 with the ground which generates traction and bears a majority of a load on the track system 14, and which will be referred to as a "contact patch" of the track 21 with the ground. The track 21 has a longitudinal axis which defines a longitudinal direction of the track 21 (i.e., a direction generally parallel to its longitudinal axis) and transversal directions of the track (i.e., directions transverse to its longitudinal axis), including a widthwise direction of the track (i.e., a lateral direction generally perpendicular to its longitudinal axis). The track 21 has a thickness direction normal to its longitudinal and widthwise directions.
[0101] The track 21 is elastomeric, i.e., comprises elastomeric material, to be flexible around the track-engaging assembly 24. The elastomeric material of the track 21 can include any polymeric material with suitable elasticity. In this embodiment, the elastomeric material of the track 21 includes rubber. Various rubber compounds may be used and, in some cases, different rubber compounds may be present in different areas of the track 21. In other embodiments, the elastomeric material of the track 21 may include another elastomer in addition to or instead of rubber (e.g., polyurethane elastomer).
[0102] More particularly, the track 21 comprises an endless body 35 underlying its inner side 25 and ground-engaging outer side 27. In view of its underlying nature, the body 35 will be referred to as a "carcass". The carcass 35 is elastomeric in that it comprises elastomeric material 38 which allows the carcass 35 to elastically change in shape and thus the track 21 to flex as it is in motion around the track-engaging assembly 24. The elastomeric material 38 can be any polymeric material with suitable elasticity. In this embodiment, the elastomeric material 38 includes rubber. Various rubber compounds may be used and, in some cases, different rubber compounds may be present in different areas of the carcass 35. In other embodiments, the elastomeric material 38 may include another elastomer in addition to or instead of rubber (e.g., polyurethane elastomer).
[0103] In this embodiment, as shown in FIGS. 8A and 8B, the carcass 35 comprises a plurality of reinforcements 45.sub.1-45.sub.P embedded in its rubber 38. These reinforcements 45.sub.1-45.sub.P can take on various forms.
[0104] For example, in this embodiment, a subset of the reinforcements 45.sub.1-45.sub.P is a plurality of transversal stiffening rods 36.sub.1-36.sub.N that extend transversally to the longitudinal direction of the track 21 to provide transversal rigidity to the track 21. More particularly, in this embodiment, the transversal stiffening rods 36.sub.1-36.sub.N extend in the widthwise direction of the track 21. Each of the transversal stiffening rods 36.sub.1-36.sub.N may have various shapes and be made of any suitably rigid material (e.g., metal, polymer or composite material).
[0105] As another example, in this embodiment, the reinforcements 45.sub.i, 45.sub.j are layers of reinforcing material that is flexible in the longitudinal direction of the track 21.
[0106] For instance, in this embodiment, the reinforcement 45.sub.i is a layer of reinforcing cables 37.sub.1-37.sub.M that are adjacent to one another and extend generally in the longitudinal direction of the track 21 to enhance strength in tension of the track 21 along its longitudinal direction. In this case, each of the reinforcing cables 37.sub.1-37.sub.M is a cord including a plurality of strands (e.g., textile fibers or metallic wires). In other cases, each of the reinforcing cables 37.sub.1-37.sub.M may be another type of cable and may be made of any material suitably flexible longitudinally (e.g., fibers or wires of metal, plastic or composite material). In some examples of implementation, respective ones of the reinforcing cables 37.sub.1-37.sub.M may be constituted by a single continuous cable length wound helically around the track 21. In other examples of implementation, respective ones of the transversal cables 37.sub.1-37.sub.M may be separate and independent from one another (i.e., unconnected other than by rubber of the track 21).
[0107] Also, in this embodiment, the reinforcement 45.sub.j is a layer of reinforcing fabric 43. The reinforcing fabric 43 comprises thin pliable material made usually by weaving, felting, knitting, interlacing, or otherwise crossing natural or synthetic elongated fabric elements, such as fibers, filaments, strands and/or others, such that some elongated fabric elements extend transversally to the longitudinal direction of the track 21 to have a reinforcing effect in a transversal direction of the track 21. For instance, the reinforcing fabric 43 may comprise a ply of reinforcing woven fibers (e.g., nylon fibers or other synthetic fibers). For example, the reinforcing fabric 43 may protect the transversal stiffening rods 36.sub.1-36.sub.N, improve cohesion of the track 21, and counter its elongation.
[0108] In some embodiments, as shown in FIG. 8B, the carcass 35 may comprise only one type of reinforcement (e.g., the reinforcing cables 37.sub.1-37.sub.M) or any other selected combination of the above-mentioned reinforcements 45.sub.1-45.sub.P.
[0109] The carcass 35 may be molded into shape in a molding process during which the rubber 38 is cured. For example, in this embodiment, a mold may be used to consolidate layers of rubber providing the rubber 38 of the carcass 35, the reinforcing cables 37.sub.1-37.sub.M and the layer of reinforcing fabric 43.
[0110] In this embodiment, the track 21 is a one-piece "jointless" track such that the carcass 35 is a one-piece jointless carcass. In other embodiments, the track 21 may be a "jointed" track (i.e., having at least one joint connecting adjacent parts of the track 21) such that the carcass 35 is a jointed carcass (i.e., which has adjacent parts connected by the at least one joint). For example, in some embodiments, the track 21 may comprise a plurality of track sections interconnected to one another at a plurality of joints, in which case each of these track sections includes a respective part of the carcass 35. In other embodiments, the track 21 may be a one-piece track that can be closed like a belt with connectors at both of its longitudinal ends to form a joint.
[0111] The ground-engaging outer side 27 of the track 21 comprises a ground-engaging outer surface 31 of the carcass 35 and a plurality of traction projections 58.sub.1-58.sub.T that project from the ground-engaging outer surface 31 to enhance traction on the ground. The traction projections 58.sub.1-58.sub.T, which can be referred to as "traction lugs" or "traction profiles", may have any suitable shape (e.g., straight shapes, curved shapes, shapes with straight parts and curved parts, etc.).
[0112] A height H of a traction projection 58.sub.x may have any suitable value. For example, in some embodiments, the height of the traction projection 58.sub.x may be at least 2 inches, in some cases at least 3 inches, in some cases at least 4 inches, in some cases at least 5 inches, and in some cases even more. The height of the traction projection 58.sub.x may have any other suitable value in other embodiments. The traction projection 58.sub.x also has a longitudinal axis 75 and a first longitudinal end 308.sub.1 and a second longitudinal end 308.sub.2 that define a length L of the traction projection 58.sub.x. The longitudinal axis 75 of the traction projection 58.sub.x extends transversally to the longitudinal direction of the track 21, in this example in the widthwise direction of the track 21.
[0113] In this embodiment, each of the traction projections 58.sub.1-58.sub.T is an elastomeric traction projection in that it comprises elastomeric material 41. The elastomeric material 41 can be any polymeric material with suitable elasticity. More particularly, in this embodiment, the elastomeric material 41 includes rubber. Various rubber compounds may be used and, in some cases, different rubber compounds may be present in different areas of each of the traction projections 58.sub.1-58.sub.T. In other embodiments, the elastomeric material 41 may include another elastomer in addition to or instead of rubber (e.g., polyurethane elastomer).
[0114] The traction projections 58.sub.1-58.sub.T may be provided on the ground-engaging outer side 27 in various ways. For example, in this embodiment, the traction projections 58.sub.1-58.sub.T are provided on the ground-engaging outer side 27 by being molded with the carcass 35.
[0115] The inner side 25 of the track 21 comprises an inner surface 32 of the carcass 35 and a plurality of inner projections 34.sub.1-34.sub.D that project from the inner surface 32 and are positioned to contact the track-engaging assembly 24 (e.g., at least some of the wheels 22.sub.1, 22.sub.2, 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2) to do at least one of driving (i.e., imparting motion to) the track 21 and guiding the track 21. Since each of them is used to do at least one of driving the track 21 and guiding the track 21, the inner projections 34.sub.1-34.sub.D can be referred to as "drive/guide projections" or "drive/guide lugs". In some cases, a drive/guide lug 34i may interact with a given one of the drive wheels 22.sub.1, 22.sub.2 to drive the track 21, in which case the drive/guide lug 34.sub.i is a drive lug. In other cases, a drive/guide lug 34.sub.i may interact with a given one of the idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.2, 30.sub.1, 30.sub.2 and/or another part of the track-engaging assembly 24 to guide the track 21 to maintain proper track alignment and prevent de-tracking without being used to drive the track 21, in which case the drive/guide lug 34.sub.i is a guide lug. In yet other cases, a drive/guide lug 34.sub.i may both (i) interact with a given one of the drive wheels 22.sub.1, 22.sub.3 to drive the track 21 and (ii) interact with a given one of the idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2 and/or another part of the track-engaging assembly 24 to guide the track 21, in which case the drive/guide lug 34.sub.i is both a drive lug and a guide lug.
[0116] In this embodiment, each of the drive/guide lugs 34.sub.1-34.sub.D is an elastomeric drive/guide lug in that it comprises elastomeric material 42. The elastomeric material 42 can be any polymeric material with suitable elasticity. More particularly, in this embodiment, the elastomeric material 42 includes rubber. Various rubber compounds may be used and, in some cases, different rubber compounds may be present in different areas of each of the drive/guide lugs 34.sub.1-34.sub.D. In other embodiments, the elastomeric material 42 may include another elastomer in addition to or instead of rubber (e.g., polyurethane elastomer).
[0117] The drive/guide lugs 34.sub.1-34.sub.D may be provided on the inner side 25 in various ways. For example, in this embodiment, the drive/guide lugs 34.sub.1-34.sub.D are provided on the inner side 25 by being molded with the carcass 35.
[0118] In this embodiment, the carcass 35 has a thickness T.sub.c which is relatively small. The thickness T.sub.c of the carcass 35 is measured from the inner surface 32 to the ground-engaging outer surface 31 of the carcass 35 between longitudinally-adjacent ones of the traction projections 58.sub.1-58.sub.T. For example, in some embodiments, the thickness T.sub.c of the carcass 35 may be no more than 0.25 inches, in some cases no more than 0.22 inches, in some cases no more than 0.20 inches, and in some cases even less (e.g., no more than 0.18 or 0.16 inches). The thickness T.sub.c of the carcass 35 may have any other suitable value in other embodiments.
[0119] Elastomeric material of a given portion of the endless track 21, including the elastomeric material 38 of the carcass 35, the elastomeric material 41 of one of the traction projection 58.sub.1-58.sub.T, and the elastomeric material 42 of one of the drive/guide lugs 34.sub.1-34.sub.D, has various material properties, including a hardness (e.g., durometers in a Shore A hardness scale) and a modulus of elasticity, which can have any suitable value.
[0120] If the elastomeric material of the given portion of the track 21 is constituted of a single elastomer, the hardness of the elastomeric material of the given portion of the track 21 is the hardness of this single elastomer. Alternatively, if the elastomeric material of the given portion of the track 21 is constituted of two or more different elastomers, the hardness of the elastomeric material of the given portion of the track 21 is taken as an average hardness, which is obtained by multiplying a proportion of each elastomer in the elastomeric material of the given portion of the track 21 by that elastomer's hardness and then summing the results. That is, if the elastomeric material of the given portion of the track 21 is constituted of N elastomers, the average hardness is
A avg = i = 1 N P i A i ##EQU00001##
where A.sub.i is the hardness of elastomer "i" and P.sub.i is the proportion (%) of elastomer "i" in the elastomeric material of the given portion of the track 21. In situations where this calculated value is not an integer and the hardness scale is only in integers, this calculated value rounded to the nearest integer gives the average hardness. An elastomer's hardness can be obtained from a standard ASTM D-2240 test (or equivalent test).
[0121] Similarly, if the elastomeric material of the given portion of the track 21 is constituted of a single elastomer, the modulus of elasticity of the elastomeric material of the given portion of the track 21 is the modulus of elasticity of this single elastomer. Alternatively, if the elastomeric material of the given portion of the track 21 is constituted of two or more different elastomers, the modulus of elasticity of the elastomeric material of the given portion of the track 21 is taken as an average modulus of elasticity, which is obtained by multiplying a proportion (%) of each elastomer in the elastomeric material of the given portion of the track 21 by that elastomer's modulus of elasticity and then summing the results. That is, if the elastomeric material of the given portion of the track 21 is constituted of N elastomers, the average modulus of elasticity is
.lamda. avg = i = 1 N P i .lamda. i ##EQU00002##
where .lamda..sub.i is the modulus of elasticity of elastomer "i" and P.sub.i is the proportion (%) of elastomer "i" in the elastomeric material of the given portion of the track 21. For instance, in an embodiment in which the elastomeric material of the given portion of the track 21 is constituted of two types of rubbers, say rubber "A" having a modulus of elasticity of 1.9 MPa and being present in a proportion of 15% and rubber "B" having a modulus of elasticity of 6.3 MPa and being present in a proportion of 85%, the average modulus of elasticity of the elastomeric material of the given portion of the track 21 is 5.64 MPa. An elastomer's modulus of elasticity can be obtained from a standard ASTM D-412-A test (or equivalent test) based on a measurement at 100% elongation of the elastomer.
[0122] The track-engaging assembly 24 is configured to drive and guide the track 21 around the track-engaging assembly 24.
[0123] Each of the drive wheels 22.sub.1, 22.sub.2 is rotatable by an axle for driving the track 21. That is, power generated by the prime mover 15 and delivered over the powertrain 12 of the snowmobile 10 rotates the axle, which rotates the drive wheels 22.sub.1, 22.sub.2, which impart motion of the track 21. In this embodiment, each drive wheel 22.sub.i comprises a drive sprocket engaging some of the drive/guide lugs 34.sub.1-34.sub.D of the inner side 25 of the track 21 in order to drive the track 21. In other embodiments, the drive wheel 22.sub.i may be configured in various other ways. For example, in embodiments where the track 21 comprises drive holes, the drive wheel 22.sub.i may have teeth that enter these holes in order to drive the track 21. As yet another example, in some embodiments, the drive wheel 22.sub.i may frictionally engage the inner side 25 of the track 21 in order to frictionally drive the track 21. The drive wheels 22.sub.1, 22.sub.2 may be arranged in other configurations and/or the track system 14 may comprise more or less drive wheels (e.g., a single drive wheel, more than two drive wheels, etc.) in other embodiments.
[0124] The idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2 are not driven by power supplied by the prime mover 15, but are rather used to do at least one of guiding the track 21 as it is driven by the drive wheels 22.sub.1, 22.sub.2, tensioning the track 21, and supporting part of the weight of the snowmobile 10 on the ground via the track 21. More particularly, in this embodiment, the rear idler wheels 26.sub.1, 26.sub.2 are trailing idler wheels that maintain the track 21 in tension, guide the track 21 as it wraps around them, and can help to support part of the weight of the snowmobile 10 on the ground via the track 21. The lower roller wheels 28.sub.1-28.sub.6 roll on the inner side 25 of the track 21 along the bottom run 66 of the track 21 to apply the bottom run 66 on the ground. The upper roller wheels 30.sub.1, 30.sub.2 roll on the inner side 25 of the track 21 along the top run 65 of the track 21 to support and guide the top run 65 as the track 21 moves. The idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2 may be arranged in other configurations and/or the track assembly 14 may comprise more or less idler wheels in other embodiments.
[0125] The frame 23 of the track system 14 supports various components of the track-engaging assembly 24, including, in this embodiment, the idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6, 30.sub.1, 30.sub.2. More particularly, in this embodiment, the frame 23 comprises an elongate support 62 extending in the longitudinal direction of the track system 14 along the bottom run 66 of the track 21 and frame members 49.sub.1-49.sub.F extending upwardly from the elongate support 62.
[0126] The elongate support 62 comprises rails 44.sub.1, 44.sub.2 extending in the longitudinal direction of the track system 14 along the bottom run 66 of the track 21. In this example, the idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6 are mounted to the rails 44.sub.1, 44.sub.2. In this embodiment, the elongate support 62 comprises sliding surfaces 77.sub.1, 77.sub.2 for sliding on the inner side 25 of the track 21 along the bottom run 66 of the track 21. Thus, in this embodiment, the idler wheels 26.sub.1, 26.sub.2, 28.sub.1-28.sub.6 and the sliding surfaces 77.sub.1, 77.sub.2 of the elongate support 62 can contact the bottom run 66 of the track 21 to guide the track 21 and apply it onto the ground for traction. In this example, the sliding surfaces 77.sub.1, 77.sub.2 can slide against the inner surface 32 of the carcass 35 and can contact respective ones of the drive/guide lugs 34.sub.1-34.sub.D to guide the track 21 in motion. Also, in this example, the sliding surfaces 77.sub.1, 77.sub.2 are curved upwardly in a front region of the track system 14 to guide the track 21 towards the drive wheels 22.sub.1, 22.sub.2. In some cases, as shown in FIG. 17, the track 21 may comprise slide members 39.sub.1-39.sub.S that slide against the sliding surfaces 77.sub.1, 77.sub.2 to reduce friction. The slide members 39.sub.1-39.sub.S, which can sometimes be referred to as "clips", may be mounted via holes (i.e., windows) 40.sub.1-40.sub.H of the track 21. In other cases, the track 21 may be free of such slide members.
[0127] In this embodiment, the elongate support 62 comprises sliders 33.sub.1, 33.sub.2 mounted to respective ones of the rails 44.sub.1, 44.sub.2 and comprising respective ones of the sliding surfaces 77.sub.1, 77.sub.2. In this embodiment, the sliders 33.sub.1, 33.sub.2 are mechanically interlocked with the rails 44.sub.1, 44.sub.2. In other embodiments, instead of or in addition to being mechanically interlocked with the rails 44.sub.1, 44.sub.2, the sliders 33.sub.1, 33.sub.2 may be fastened to the rails 44.sub.1, 44.sub.2. For example, in some embodiments, the sliders 33.sub.1, 33.sub.2 may be fastened to the rails 44.sub.1, 44.sub.2 by one or more mechanical fasteners (e.g., bolts, screws, etc.), by an adhesive, and/or by any other suitable fastener.
[0128] In some examples, each slider 33.sub.i may comprise a low-friction material which may reduce friction between its sliding surface 77.sub.i and the inner side 25 of the track 21. For instance, the slider 33.sub.i may comprise a polymeric material having a low coefficient of friction with the rubber of the track 21. For example, in some embodiments, the slider 33.sub.i may comprise a thermoplastic material (e.g., a Hifax.RTM. polypropylene). The slider 33.sub.i may comprise any other suitable material in other embodiments. For instance, in some embodiments, the sliding surface 77.sub.i of the slider 33.sub.i may comprise a coating (e.g., a polytetrafluoroethylene (PTFE) coating) that reduces friction between it and the inner side 25 of the track 21, while a remainder of the slider 33.sub.i may comprise any suitable material (e.g., a metallic material, another polymeric material, etc.).
[0129] While in embodiments considered above the sliding surface 77.sub.i is part of the slider 33.sub.i which is separate from and mounted to each rail 44.sub.i, in other embodiments, the sliding surface 77.sub.i may be part of the rail 44.sub.i. That is, the sliding surface 77.sub.i may be integrally formed (e.g., molded, cast, or machined) as part of the rail 44.sub.i.
[0130] The frame members 49.sub.1-49.sub.F extend upwardly from the elongate support 62 to hold the upper roller wheels 30.sub.1, 30.sub.2 such that the upper roller wheels 30.sub.1, 30.sub.2 roll on the inner side 25 of the track 21 along the top run 65 of the track 21.
[0131] The track-engaging assembly 24 may be implemented in any other suitable way in other embodiments.
[0132] The track system 14, including the track 21, may have various features to enhance its traction, floatation, and/or other aspects of its performance, including, for example, a lightweight design, enhanced tractive effects, an enhanced heat management capability, an enhanced resistance to lateral skidding (e.g., on a side hill), an adaptive capability to adapt itself to different conditions (e.g., ground conditions, such as different types of snow, soil, etc.; and/or other conditions), an adjustability of its contact patch 59, and/or other features. This may be achieved in various ways in various embodiments, examples of which will now be discussed.
1. Lightweight Track
[0133] In some embodiments, the track 21 may be designed to reduce a weight of the track 21 while maintaining performance of the track 21. This may help to reduce power consumption, improve riding of the snowmobile 10, and/or enhance other aspects of performance of the snowmobile 10.
1.1 Thin Carcass
[0134] In some embodiments, as shown in FIG. 7, the carcass 35 may be very thin yet remain sufficiently rigid for proper traction and floatation.
[0135] For example, in some embodiments, the thickness T.sub.c of the carcass 35 may be no more than 0.20 inches, in some cases no more than 0.18 inches, in some cases no more than 0.16 inches, and in some cases even less (e.g., no more than 0.14 inches). For instance, in some examples of implementation, the thickness T.sub.c of the carcass 35 may be 0.165 inches or less.
[0136] Meanwhile, in such embodiments, rigidity characteristics of the carcass 35 allow proper performance of the track 21. For instance, the rigidity characteristics of the carcass 35 may relate to (1) a longitudinal rigidity of the carcass 35, i.e., a rigidity of the carcass 35 in the longitudinal direction of the track 21 which refers to the carcass's resistance to bending about an axis parallel to the widthwise direction of the track 21, and/or (2) a widthwise rigidity of the carcass 35, i.e., a rigidity of the carcass 35 in the widthwise direction of the track 21 which refers to the carcass's resistance to bending about an axis parallel to the longitudinal direction of the track 21.
[0137] To observe the longitudinal rigidity and the widthwise rigidity of the carcass 35 without influence from a remainder of the track 21, as shown in FIG. 9, the carcass 35 can be isolated from the remainder of the track 21 (e.g., by scraping, cutting, or otherwise removing the traction projections 58.sub.1-58.sub.T and the drive/guide lugs 34.sub.1-34.sub.D, or by producing the carcass 35 without the traction projections 58.sub.1-58.sub.T, the carcass 35, the drive/guide lugs 34.sub.1-34.sub.D) and a three-point bending test can be performed on a sample of the carcass 35 to subject the carcass 35 to loading tending to bend the carcass 35 in specified ways (i.e., bend the carcass 35 longitudinally to observe the longitudinal rigidity of the carcass 35 and bend the carcass 35 laterally to observe the widthwise rigidity of the carcass 35) and measure parameters indicative of the longitudinal rigidity and the widthwise rigidity of the carcass 35. For instance in some embodiments, the three-point bending test may be based on conditions defined in a standard test (e.g., ISO 178(2010) but using elastomeric material). For example: [0138] To observe the longitudinal rigidity of the carcass 35, the three-point bending test may be performed to subject the carcass 35 to loading tending to longitudinally bend the carcass 35 until a predetermined deflection of the carcass 35 is reached and measure a bending load at that predetermined deflection of the carcass 35. The predetermined deflection of the carcass 35 may be selected such as to correspond to a predetermined strain of the carcass 35 at a specified point of the carcass 35 (e.g., a point of the inner surface 32 of the carcass 35). For instance, in some embodiments, the predetermined strain of the carcass 35 may between 3% and 5%. The bending load at the predetermined deflection of the carcass 35 may be used to calculate a bending stress at the specified point of the carcass 35. The bending stress at the specified point of the carcass 35 may be calculated as .sigma.=My/I, where M is the moment about a longitudinal-bending neutral axis 63 of the carcass 35 caused by the bending load, y is the perpendicular distance from the specified point of the carcass 35 to the neutral axis of the carcass 35, and I is the second moment of area about the neutral axis of the carcass 35. The longitudinal rigidity of the carcass 35 can be taken as the bending stress at the predetermined strain (i.e., at the predetermined deflection) of the carcass 35. Alternatively, the longitudinal rigidity of the carcass 35 may be taken as the bending load at the predetermined deflection of the carcass 35; [0139] To observe the widthwise rigidity of the carcass 35, the three-point bending test may be performed to subject the carcass 35 to loading tending to laterally bend the carcass 35 until a predetermined deflection of the carcass 35 is reached and measure a bending load at that predetermined deflection of the carcass 35. The predetermined deflection of the carcass 35 may be selected such as to correspond to a predetermined strain of the carcass 35 at a specified point of the carcass 35 (e.g., a point of the inner surface 32 of the carcass 35). For instance, in some embodiments, the predetermined strain of the carcass 35 may between 3% and 5%. The bending load at the predetermined deflection of the carcass 35 may be used to calculate a bending stress at the specified point of the carcass 35. The bending stress at the specified point of the carcass 35 may be calculated as .sigma.=My/I, where M is the moment about a lateral-bending neutral axis 57 of the carcass 35 caused by the bending load, y is the perpendicular distance from the specified point of the carcass 35 to the neutral axis of the carcass 35, and I is the second moment of area about the neutral axis of the carcass 35. The widthwise rigidity of the carcass 35 can be taken as the bending stress at the predetermined strain (i.e., at the predetermined deflection) of the carcass 35. Alternatively, the widthwise rigidity of the carcass 35 may be taken as the bending load at the predetermined deflection of the carcass 35.
[0140] Thus, in such embodiments where the carcass 35 is very thin, the widthwise rigidity of the carcass 35 may be significantly greater than the longitudinal rigidity of the carcass 35. For instance, a ratio of the widthwise rigidity of the carcass 35 over the longitudinal rigidity of the carcass 35 may be at least 1.5, in some cases at least 2, in some cases at least 2.5, in some cases at least 3, and in some cases even more (e.g., 4, 5, etc.).
[0141] As another example, in some embodiments, the carcass 35 being very thin while sufficiently rigid may be such that a ratio of the longitudinal rigidity of the carcass 35 over the thickness T.sub.c of the carcass 35 is relatively high and/or a ratio of the widthwise rigidity of the carcass 35 over the thickness T.sub.c of the carcass 35 is relatively high.
[0142] The carcass 35 may be maintained sufficiently rigid in any suitable way in various embodiments. Examples of this are discussed below.
1.1.1 Stiffer Reinforcement
[0143] In some embodiments, as shown in FIG. 8A, a reinforcement 45.sub.x embedded in the rubber 38 of the carcass 35 may be stiffer. That is, a bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 and/or a bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be relatively high. As shown in FIG. 8A, the reinforcement 45.sub.x may be, for example, a layer of reinforcing material flexible in the longitudinal direction of the track 21, such as a layer of reinforcing cables 37.sub.1-37.sub.M or a layer of reinforcing fabric 43.
[0144] The bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 may be measured using a three-point bending test performed on a sample of the reinforcement 45.sub.x to subject the reinforcement 45.sub.x to loading tending to bend the reinforcement 45.sub.x in the longitudinal direction of the track 21 until a predetermined deflection of the reinforcement 45.sub.x is reached and measure a bending load at that predetermined deflection of the reinforcement 45.sub.x, and calculating the bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 as a ratio of that bending load over that predetermined deflection.
[0145] The bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 depends on a product of an area moment of inertia (i.e., a second moment of area) of a cross-section of the reinforcement 45.sub.x normal to the longitudinal direction of the track 21 and a modulus of elasticity (i.e., Young's modulus) of a material of the reinforcement 45.sub.x. As such, the bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 may be increased by increasing the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the longitudinal direction of the track 21 and/or the modulus of elasticity of the material of the reinforcement 45.sub.x.
[0146] Similarly, the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be measured using a three-point bending test performed on a sample of the reinforcement 45.sub.x to subject the reinforcement 45.sub.x to loading tending to bend the reinforcement 45.sub.x in the widthwise direction of the track 21 until a predetermined deflection of the reinforcement 45.sub.x is reached and measure a bending load at that predetermined deflection of the reinforcement 45.sub.x, and calculating the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 as a ratio of that bending load over that predetermined deflection.
[0147] The bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 depends on a product of an area moment of inertia (i.e., a second moment of area) of a cross-section of the reinforcement 45.sub.x normal to the widthwise direction of the track 21 and the modulus of elasticity (i.e., Young's modulus) of the material of the reinforcement 45.sub.x. As such, the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be increased by increasing the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the widthwise direction of the track 21 and/or the modulus of elasticity of the material of the reinforcement 45.sub.x.
[0148] For example, in some embodiments, the bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 may be at least a certain value, and/or the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be at least a certain value.
[0149] In some embodiments, a ratio of the bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 over the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be at least 2, in some cases at least 3, in some cases at least 4, in some cases at least 5, and in some cases even more (e.g., 6, 7, 8 or more).
[0150] As another example, in some embodiments, the carcass 35 being very thin while sufficiently rigid may be such that a ratio of the bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 over the thickness T.sub.c of the carcass 35 is relatively high and/or a ratio of the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 over the thickness T.sub.c of the carcass 35 is relatively high. For instance, in some embodiments, the ratio of the bending stiffness of the reinforcement 45.sub.x in the longitudinal direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least a certain value, and/or the ratio of the bending stiffness of the reinforcement 45.sub.x in the widthwise direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least a certain value.
[0151] As another example, in some embodiments, a ratio of the modulus of elasticity of the reinforcement 45.sub.x in the longitudinal direction of the track 21 over the modulus of elasticity of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be at least 2, in some cases at least 3, in some cases at least 4, in some cases at least 5, and in some cases even more (e.g., 6, 7, 8 or more). For instance, in some embodiments, the modulus of elasticity of the reinforcement 45.sub.x in the longitudinal direction of the track 21 may be at least 200 MPa, in some cases at least 300 MPa, in some cases at least 400 MPa, and in some cases even more, while the modulus of elasticity of the reinforcement 45.sub.x in the widthwise direction of the track 21 may be at least 1 GPa, in some cases at least 1.5 GPa, in some cases at least 2.0 GPa, in some cases at least 2.5 GPa, and in some cases even more. Alternatively or additionally, the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the longitudinal direction of the track 21 and/or the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the widthwise direction of the track 21 may be at least a certain value. The modulus of elasticity of the reinforcement 45.sub.x, the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the longitudinal direction of the track 21, and/or the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the widthwise direction of the track 21 may have any other suitable values in other embodiments.
[0152] As another example, in some embodiments, the carcass 35 being very thin while sufficiently rigid may be such that a ratio of the modulus of elasticity of the reinforcement 45.sub.x over the thickness T.sub.c of the carcass 35 is relatively high, a ratio of the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the longitudinal direction of the track 21 over the thickness T.sub.c of the carcass 35 is relatively high, and/or a ratio of the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the widthwise direction of the track 21 over the thickness T.sub.c of the carcass 35 is relatively high. For instance, in some embodiments, the ratio of the modulus of elasticity of the reinforcement 45.sub.x in the longitudinal direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least 1 GPa/in, in some cases at least 1.5 GPa/in, in some cases at least 2 GPa/in, and in some cases even more, and the ratio of the modulus of elasticity of the reinforcement 45.sub.x in the widthwise direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least 5 GPa/in, in some cases at least 7 GPa/in, in some cases at least 9 GPa/in, in some cases at least 12 GPa/in, and in some cases even more. Moreover, the ratio of the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the longitudinal direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least a certain value, and/or the ratio of the area moment of inertia of the cross-section of the reinforcement 45.sub.x normal to the widthwise direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least a certain value. These ratios may have any other suitable values in other embodiments.
1.1.2 Stiffer Elastomeric Material
[0153] In some embodiments, the elastomeric material 38 of the carcass 35 may be stiffer. For example, in some embodiments, the 300% modulus of the elastomeric material 38 of the carcass 35 (i.e., the Young's modulus of the elastomeric material 38 at 300% elongation) may be at least 15 MPa, in some cases at least 20 MPa, in some cases at least 25 MPa, and in some cases even more (e.g., 30 MPa). The modulus of elasticity of the elastomeric material 38 of the carcass 35 may have any other suitable value in other embodiments.
1.1.3 Increased Spacing of Reinforcements
[0154] In some embodiments, respective ones of the reinforcements 45.sub.1-45.sub.P embedded in the elastomeric material 38 of the carcass 35 may be spaced apart from one another significantly in order to increase the longitudinal rigidity and/or the widthwise rigidity of the carcass 35.
[0155] For example, in some embodiments, as shown in FIG. 10, a reinforcement 45.sub.i and a reinforcement 45.sub.j that mainly stiffen the track 21 laterally and that are adjacent to one another in the thickness direction of the track 21 (i.e., there is no reinforcement mainly stiffening the track 21 laterally between the reinforcements 45.sub.i, 45.sub.j) may be spaced apart significantly in order to increase the track's widthwise rigidity. Each of the reinforcements 45.sub.i, 45.sub.j may thus be spaced apart significantly from the lateral-bending neutral axis 57 of the carcass 35.
[0156] For instance, in some embodiments, a ratio of a spacing S.sub.r-w of the reinforcements 45.sub.i, 45.sub.j in the thickness direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least 0.4, in some cases at least 0.5, in some cases at least 0.6, and in some cases even more. As an example, in some embodiments, where the thickness T.sub.c of the carcass 35 is 5 mm, the spacing S.sub.r-w of the reinforcements 45.sub.i, 45.sub.j may be at least 2 mm, in some cases at least 2.5 mm, in some cases at least 3 mm, and in some cases even more. The ratio of the spacing S.sub.r-w of the reinforcements 45.sub.i, 45.sub.j over the thickness T.sub.c of the carcass 35, the spacing S.sub.r-w of the reinforcements 45.sub.i, 45.sub.j, and/or the thickness T.sub.c of the carcass 35 may have any other suitable value in other embodiments.
[0157] In some embodiments, a stiffness of the reinforcement 45.sub.i in the widthwise direction of the track 21 and a stiffness of the reinforcement 45.sub.j in the widthwise direction of the track 21 may be substantially identical. For instance, in some cases, the reinforcements 45.sub.i, 45.sub.j may be of a common type or structure. For example, the reinforcements 45.sub.i, 45.sub.j may be substantially identical layers of reinforcing cables or of reinforcing fabric.
[0158] Alternatively, in some embodiments, the stiffness of the reinforcement 45.sub.i in the widthwise direction of the track 21 and the stiffness of the reinforcement 45.sub.j in the widthwise direction of the track 21 may be substantially different. For example, in some cases, the reinforcements 45.sub.i, 45.sub.j may be layers of reinforcing cables that differ from one another (e.g., in terms of cable material, diameter, pitch, etc.). As another example, in some cases, the reinforcements 45.sub.i, 45.sub.j may be layers of reinforcing fabric that differ from one another (e.g., in terms of fabric material, configuration (e.g., weft, warp, bias, etc.), etc.). As yet another example, in some cases, the reinforcements 45.sub.i, 45.sub.j may be respective ones of a layer of reinforcing cable and a layer of reinforcing fabric.
[0159] In a similar manner, in some embodiments, as shown in FIG. 11, a reinforcement 45.sub.m and a reinforcement 45.sub.n that mainly stiffen the track 21 longitudinally and that are adjacent to one another in the thickness direction of the track 21 (i.e., there is no reinforcement mainly stiffening the track 21 longitudinally between the reinforcements 45.sub.m, 45.sub.n) may be spaced apart significantly in order to increase the track's longitudinal rigidity. Each of the reinforcements 45.sub.m, 45.sub.n may thus be spaced apart significantly from a longitudinal-bending neutral axis 63 of the carcass 35.
[0160] For instance, in some embodiments, a ratio of a spacing S.sub.r-l of the reinforcements 45.sub.m, 45.sub.n in the thickness direction of the track 21 over the thickness T.sub.c of the carcass 35 may be at least 0.4, in some cases at least 0.5, in some cases at least 0.6, and in some cases even more. As an example, in some embodiments, where the thickness T.sub.c of the carcass 35 is 5 mm, the spacing S.sub.r-l of the reinforcements 45.sub.m, 45.sub.n may be at least 2 mm, in some cases at least 2.5 mm, in some cases at least 3 mm, and in some cases even more. The ratio of the spacing S.sub.r-l of the reinforcements 45.sub.m, 45.sub.n over the thickness T.sub.c of the carcass 35, the spacing S.sub.r-l of the reinforcements 45.sub.m, 45.sub.n, and/or the thickness T.sub.c of the carcass 35 may have any other suitable value in other embodiments.
[0161] In some embodiments, a stiffness of the reinforcement 45.sub.m in the longitudinal direction of the track 21 and a stiffness of the reinforcement 45.sub.n in the longitudinal direction of the track 21 may be substantially identical. For instance, in some cases, the reinforcements 45.sub.m, 45.sub.n may be of a common type or structure. For example, the reinforcements 45.sub.m, 45.sub.n may be substantially identical layers of reinforcing cables or of reinforcing fabric.
[0162] Alternatively, in some embodiments, the stiffness of the reinforcement 45.sub.m in the longitudinal direction of the track 21 and the stiffness of the reinforcement 45.sub.n in the longitudinal direction of the track 21 may be substantially different. For example, in some cases, the reinforcements 45.sub.m, 45.sub.n may be layers of reinforcing cables that differ from one another (e.g., in terms of cable material, diameter, pitch, etc.). As another example, in some cases, the reinforcements 45.sub.m, 45.sub.n may be layers of reinforcing fabric that differ from one another (e.g., in terms of fabric material, configuration (e.g., weft, warp, bias, etc.), etc.). As yet another example, in some cases, the reinforcements 45.sub.m, 45.sub.n may be respective ones of a layer of reinforcing cable and a layer of reinforcing fabric.
1.2 Low-Density Elastomeric Material
[0163] In some embodiments, as shown in FIG. 12, the elastomeric material of the track 21 may comprise elastomeric material 50 having a density that is relatively low. This "lower-density" elastomeric material 50 may help to reduce the weight of the track 21.
[0164] For example, in this embodiment, in addition to the lower-density elastomeric material 50, the elastomeric material of the track 21 comprises elastomeric material 52 having a density that is relatively higher such that the lower-density elastomeric material 50 is less dense than this "higher-density" elastomeric material 52. For instance, in some embodiments, a ratio of the density of the lower-density elastomeric material 50 over the density of the higher-density elastomeric material 52 may be no more than 0.9, in some cases no more than 0.8, in some cases no more than 0.7, in some cases no more than 0.6, and in some cases even less (e.g., no more than 0.5). This ratio may have any other suitable value in other embodiments.
[0165] For instance, in some embodiments, the density of the lower-density elastomeric material 50 may be no more than 1.4 g/cm.sup.3, in some cases no more than 1.2 g/cm.sup.3, in some cases no more than 1.0 g/cm.sup.3, in some cases no more than 0.8 g/cm.sup.3 and in some cases even less, and/or the density of the higher-density elastomeric material 52 may be at least 1.4 g/cm.sup.3, in some cases at least 1.6 g/cm.sup.3, in some cases at least 1.8, in some cases at least 2.0 g/cm.sup.3 and in some cases even more. The density of the lower-density elastomeric material 50 and/or the density of the higher-density elastomeric material 52 may have any other suitable value in other embodiments.
[0166] More particularly, in this embodiment, the lower-density elastomeric material 50 is internal elastomeric material 54 of the track 21 that is located away from a periphery 56 of the track 21 (i.e., the inner side 25, the ground-engaging outer side 27, and lateral edges 55.sub.1, 55.sub.2 of the track 21), such as elastomeric material 38 inside the carcass 35, elastomeric material 41 inside the traction projections 58.sub.1-58.sub.T, and/or elastomeric material 42 inside the drive/guide lugs 34.sub.1-34.sub.D, while the higher-density elastomeric material 52 is peripheral elastomeric material 60 forming at least part of the periphery 56 of the track 21, such as elastomeric material 62 of the inner side 25 of the track 21, elastomeric material 64 of the ground-engaging outer side 27 of the track 21, and/or elastomeric material 68 of the lateral edges 55.sub.1, 55.sub.2 of the track 21. This may help to reduce the weight of the track 21 while providing suitable wear resistance and/or other useful properties in external regions of the track 21 that may be expected to wear faster and/or be subject to other particular effects during use.
[0167] In this embodiment, the elastomeric material 62 of the inner side 25 of the track 21 comprises an elastomeric material of the inner surface 32 of the carcass 35 and an elastomeric material of an outer surface of the drive/guide lugs 34.sub.1-34.sub.D; the elastomeric material 64 of the ground-engaging outer side 27 of the track 21 comprises an elastomeric material of the ground-engaging outer surface 31 of the carcass 35 and an elastomeric material 41 of an outer surface of the traction projections 58.sub.1-58.sub.T; and the elastomeric material 38 inside the carcass 35 is part of the internal elastomeric material 54 spaced from the inner surface 32 and the ground-engaging outer surface 31 of the carcass 35. In this example, the internal elastomeric material 54 is thus encapsulated in the elastomeric material 62, 64, 68 of the inner side 25, the ground-engaging outer side 27 and the lateral edges 55.sub.1, 55.sub.2 of the track 21.
[0168] In this embodiment, a quantity of the internal elastomeric material 54 is significant to allow this elastomeric material to occupy more space within the track 21. For example, in some embodiments, as shown in FIGS. 13A, 13B and 14, a thickness T.sub.q of the internal elastomeric material 54 inside the carcass 35 may occupy at least 20% of the thickness T.sub.c of the carcass 35, in some cases at least 30% of the thickness T.sub.c of the carcass 35, in some cases at least 40% of the thickness T.sub.c of the carcass 35, in some cases at least 50% of the thickness T.sub.c of the carcass 35, and in some cases even more (e.g., 60%, 70% or more). In this example of implementation, the thickness T.sub.q of the internal elastomeric material 54 inside the carcass 35 occupies at least a majority, in this case at least three-quarters, of the thickness T.sub.c of the carcass 35. The thickness T.sub.q of the internal elastomeric material 54 inside the carcass 35 may have any other suitable value in other embodiments. As another example, in some embodiments, a width W.sub.q of the internal elastomeric material 54 inside the carcass 35 may occupy at least 20% of a width W of the track 21 (measured between the lateral edges 55.sub.1, 55.sub.2 of the track 21), in some cases at least 30% of the width W of the track 21, in some cases at least 40% of the width W of the track 22, in some cases at least 50% of the width W of the track 21, and in some cases even more (e.g., 60%, 70% or more). In this example of implementation, the width W.sub.q of the internal elastomeric material 54 inside the carcass 35 occupies at least a majority, in this case at least three-quarters, of the width W of the track 21. In this example, the internal elastomeric material 54 inside the carcass 35 is constituted of a single segment. In other embodiments, the internal elastomeric material 54 inside the carcass 35 may be constituted of separate segments (e.g., two segments) such that its width W.sub.q corresponds to a sum of a width of each of these separate segments. The width W.sub.q of the internal elastomeric material 54 inside the carcass 35 may have any other suitable value in other embodiments. As yet another example, in some embodiments, a weight of the internal elastomeric material 54 inside the carcass 35 may constitute at least 25% of a total weight of elastomeric material of the track 21, in some cases at least 30% of the total weight of elastomeric material of the track 21, in some cases at least 35% of the total weight of elastomeric material of the track 21, in some cases at least 40% of the total weight of elastomeric material of the track 21, and in some cases even more.
[0169] This arrangement of the internal elastomeric material 54 inside the carcass 35 and the elastomeric material 62, 64, 68 of the inner side 25, the ground-engaging outer side 27 and the lateral edges 55.sub.1, 55.sub.2 of the track 21 may be achieved by placing elastomeric components (e.g., sheets or other layers of elastomeric material and/or blocks of elastomeric material previously produced using any suitable process such as calendering, molding, etc.) in a mold and consolidating them. Different elastomeric compounds may be used in the inner side 25, the ground-engaging outer side 27 and/or the lateral edges 55.sub.1, 55.sub.2 of the track 21 than inside the carcass 35 (e.g., rubber compounds having different base polymers, different concentrations and/or types of carbon black, and/or different contents of sulfur or other vulcanizing agent).
[0170] The lower-density elastomeric material 50 may be implemented in any suitable way in various embodiments.
[0171] For example, in some embodiments, the lower-density elastomeric material 50 may be cellular elastomeric material (e.g., cellular rubber, a.k.a foam rubber or expanded rubber). The cellular elastomeric material 50 is elastomeric material which contains cells (e.g., bubbles) created by a foaming agent (e.g., a gas (e.g., air) or a gas-producing agent (e.g., sodium bicarbonate)) during manufacturing of the cellular elastomeric material 50. The cells of the cellular elastomeric material 50 may include closed cells and/or open cells.
[0172] For instance, the cellular elastomeric material 50 may be expanded rubber (a.k.a. foam rubber).
[0173] The cellular elastomeric material 50 may be manufactured in any suitable way. For instance, a foaming agent may be sprayed, poured or molded with an elastomeric material (e.g., rubber) to react with the elastomeric material in order to produce the cellular elastomeric material 50. The foaming agent may be azodicarbonamide (ADC), sulfonylhydrazides (OBSH, TSH and/or BSH), silica, a suitable ceramic material or any other suitable foaming agent.
[0174] The cellular elastomeric material 50 may be molded with the higher-density elastomeric material 52 in any suitable way. For instance, the cellular elastomeric material 50 may be molded in a first mold and then inserted into a second mold where it is overmolded by the higher-density elastomeric material 52.
[0175] In other embodiments, the cellular elastomeric material 50 may be molded together with the higher-density elastomeric material 52 via compression molding.
[0176] In this embodiment, the higher-density elastomeric material 52 is not cellular elastomeric material, i.e., it substantially does not contain cells created by a foaming agent during its manufacturing.
[0177] In other embodiments, both the lower-density elastomeric material 50 and the higher-density elastomeric material 52 may be cellular.
[0178] The lower-density elastomeric material 50 may constitute other parts of the track 21 and/or may otherwise be provided in different ways in the track 21 in other embodiments.
[0179] For example, in some embodiments, as shown in FIG. 15, in addition to the lower-density elastomeric material 50, the track 21 may comprise a plurality of higher-density elastomeric materials 70.sub.1, 70.sub.2 that have different densities and that are denser than the lower-density elastomeric material 50. For instance, the higher-density elastomeric material 70.sub.1 may be denser than the higher-density elastomeric material 70.sub.2 such that the lower-density elastomeric material 50 and the higher-density elastomeric material 70.sub.1 have a lowest and a highest density respectively while the higher-density elastomeric material 70.sub.2 has a medium density. The lower-density and the higher density elastomeric materials 50, 70.sub.1, 70.sub.2 may be arranged in any suitable way. For example, the lower-density and the higher-density elastomeric materials 50, 70.sub.1, 70.sub.2 may be arranged to form a density gradient. For instance, the lower-density elastomeric material 50 may be an innermost elastomeric material, the higher-density elastomeric material 70.sub.1 may be an outermost elastomeric material, and the higher-density elastomeric material 70.sub.1 may be a middle elastomeric material.
[0180] In some embodiments, as shown in FIG. 16, the lower-density elastomeric material 50 may form part of the periphery 56 of the track 21. For instance, in some cases, the lower-density elastomeric material 50 may form part of the periphery 56 at the inner side 25 of the track 21 since the inner side 25 of the track 21 is less exposed to wear than the outer side 27 of the track 21. In some embodiments, the lower-density elastomeric material 50 may form part of the periphery 56 of the track 21 at the outer side 27 of the track 21.
[0181] The lower-density elastomeric material 50 may constitute at least a bulk of the elastomeric material of the track 21. For instance, the lower-density elastomeric material 50 may constitute at least a majority of the elastomeric material of the track 21. In some embodiments, the lower-density elastomeric material 50 may constitute an entirety of the elastomeric material of the track 21 (e.g., there is no higher-density elastomeric material).
[0182] In some embodiments, the lower-density elastomeric material 50 may comprise other types of material rather than cellular elastomeric material. For instance, the lower-density elastomeric material 50 may comprise any suitable low-density polymeric material. For example, the lower-density elastomeric material 50 may comprise polypropylene, polyethylene or any other suitable material.
1.3 Track with Few or No Slide Members (e.g., "Clips")
[0183] In some embodiments, as shown in FIG. 18, the track 21 may have fewer or no slide member (e.g., "clips") such as the slide members 39.sub.1-39.sub.S to slide against the sliding surfaces 77.sub.1, 77.sub.2 of the rails 44.sub.1, 44.sub.2 of the track-engaging assembly 24.
[0184] For instance, in some embodiments, the track 21 may comprise the slide members 39.sub.1-39.sub.S in a reduced number. In such embodiments, longitudinally-adjacent ones of the slide members 39.sub.1-39.sub.S may be significantly spaced apart from one another. More specifically, as shown in FIG. 19, a longitudinal spacing J defined between longitudinally-adjacent ones of the slide members 39.sub.1-39.sub.S may be large. For example, in some cases the longitudinal spacing J may be at least one-fifth of the length of the track 21, in some cases at least one-quarter of the length of the track 21, in some cases at least one-third of the length of the track 21, in some cases at least half of the length of the track 21, and in some cases even more.
[0185] In some embodiments, the longitudinal spacing J defined between longitudinally-adjacent ones of the slide members 39.sub.1-39.sub.S may be such that no more than a certain number of slide members 39.sub.1-39.sub.S can contact a rail 44.sub.i at any given instant. For example, in some cases, no more than three slide members 39.sub.1-39.sub.S may contact the rail 44.sub.i at any given instant, in some cases no more than two slide members 39.sub.1-39.sub.S may contact the rail 44.sub.i at any given instant, and in some cases no more than one slide member 39.sub.1-39.sub.S may contact the rail 44.sub.i at any given instant.
[0186] In other embodiments, the track 21 may be free of slide members and thus may be referred to as a "clipless" track.
2. Different Traction Projections with Different Tractive Effects
[0187] In some embodiments, as shown in FIG. 20, respective ones of the traction projections 58.sub.1-58.sub.T may have different characteristics (e.g., different shapes and/or different rigidity characteristics) to generate different tractive effects on the ground. For instance, this may allow the track 21 to perform well in different ground conditions, such as different types of snow, soil, etc.
[0188] For example, in this embodiment, longitudinally-successive traction projections 58.sub.i-58.sub.k that succeed one another in the longitudinal direction of the track 21 differ in height. In this example, the height of the traction projection 58.sub.i (i.e., H.sub.1) is greater than the height of the traction projections 58.sub.j (i.e., H.sub.2), which is greater than the height of the traction projection 58.sub.k (i.e., H.sub.3). This pattern may be repeated over other longitudinally-successive ones of the traction projections 58.sub.1-58.sub.T. For instance, this may allow the traction projections 58.sub.1-58.sub.T to have different degrees of engagement with the ground in different ground conditions.
[0189] In this embodiment, the longitudinally-successive traction projections 58.sub.i-58.sub.k may have different rigidity characteristics.
[0190] For instance, a taller one of the longitudinally-successive traction projections 58.sub.i-58.sub.k (e.g., 58.sub.i) may comprise an upper portion 72 that is more flexible than an upper portion 74 of a lower one of the longitudinally-successive traction projections 58.sub.i-58.sub.k (e.g., 58.sub.i). For example, a modulus of elasticity of a material 76 of the upper portion 72 of the traction projection 58.sub.i may be lower than a modulus of elasticity of a material 78 of the upper portion 74 of the traction projection 58.sub.i.
[0191] For instance, in some embodiments, a ratio of the modulus of elasticity of the material 76 of the upper portion 72 of the traction projection 58.sub.i over the modulus of elasticity of the material 78 of the upper portion 74 of the traction projection 58.sub.i may be at least 1.5, in some cases at least 2, in some cases at least 2.5, in some cases at least 3, and in some cases even more.
3. Traction Projections Providing Enhanced Heat Management
[0192] In some embodiments, as shown in FIGS. 21 and 22, respective ones of the traction projections 58.sub.1-58.sub.T may be configured to allow the track 21 to better manage heat generated within its elastomeric material as it moves around the track-engaging assembly 24. Notably, this may reduce heat buildup within the track 21 by allowing more heat to be transferred to the track's environment.
[0193] For example, in some embodiments, a traction projection 58.sub.x may be designed such that a base 80 of the traction projection 58.sub.x from which it projects from the carcass 35 leaves more of the ground-engaging outer surface 31 of the carcass 35 exposed to facilitate transfer of heat from the carcass 35 to the track's environment. This may thus reduce heat buildup within the carcass 35.
[0194] In this embodiment, the traction projection 58.sub.x comprises a recessed space 82 that defines a recessed area 84 at the base 80 of the traction projection 58.sub.x which leaves an open area 86 of the ground-engaging outer surface 31 of the carcass 35 exposed. The recessed area 84 at the base 80 of the traction projection 58.sub.x is delimited by an imaginary boundary 88 made up of the base 80 of the traction projection 58.sub.x and straight lines circumscribing the base 80 of the traction projection 58.sub.x.
[0195] The recessed area 84 at the base 80 of the traction projection 58.sub.x may be significant in relation to a cross-sectional area of the base 80 of the traction projection 58.sub.x. For example, in some embodiments, a ratio of the recessed area 84 at the base 80 of the traction projection 58.sub.x over the cross-sectional area of the base 80 of the traction projection 58.sub.x may be at least 30%, in some cases at least 40%, in some cases at least 50%, in some cases at least 60%, in some cases at least 70%, in some cases at least 80%, and in some cases even more. This ratio may have any other suitable value in other embodiments.
[0196] In this embodiment, the traction projection 58.sub.x comprises narrow portions 90 and enlarged portions 92 that are larger than the narrow portions 90 in the longitudinal direction of the track 21. For instance, the narrow portions 90 may be walls forming "paddles" and the enlarged portions 92 may be blocks forming "columns".
[0197] In some embodiments, a ratio of a dimension of a narrow portion 90 over a dimension of an enlarged portion 92 in the longitudinal direction of the track 21 may be at least 0.05, in some cases at least 0.1, in some cases at least 0.15, in some cases at least 0.2 and in some cases even more (e.g., 0.25, 0.3, etc.). Moreover, in some embodiments, a ratio of a dimension of a narrow portion 90 over a dimension of an enlarged portion 92 in the widthwise direction of the track 21 may be at least 1, in some cases at least 1.5, in some cases at least 2, in some cases at least 2.5 and in some cases even more (e.g., 3).
[0198] The recessed space 82 and the recessed area 84 at the base 80 of the traction projection 58.sub.x may be configured in any other suitable way in other embodiments.
4. Enhancement Based on Spacing of Traction Projections
[0199] In some embodiments, as shown in FIG. 5, a longitudinal spacing S.sub.t of adjacent traction projections 58.sub.i, 58.sub.j (i.e., a spacing of the adjacent traction projections 58.sub.i, 58.sub.j in the longitudinal direction of the track 21), which can be referred to as a "pitch" of the adjacent traction projections 58.sub.i, 58.sub.j, may be used to improve a performance of the track 21.
[0200] For example, in some embodiments, as shown in FIG. 23, the pitch S.sub.t of the adjacent traction projections 58.sub.i, 58.sub.j may be greater than a longitudinal spacing S.sub.i of adjacent drive/guide lugs 34.sub.i, 34.sub.j (i.e., a spacing of the adjacent drive/guide lugs 34.sub.i, 34.sub.j in the longitudinal direction of the track 21), which can be referred to as a "pitch" of the adjacent drive/guide lugs 34.sub.i, 34.sub.j. For instance, in some embodiments, a ratio of the pitch S.sub.t of the adjacent traction projections 58.sub.i, 58.sub.j over the pitch S.sub.i of the adjacent drive/guide lugs 34.sub.i, 34.sub.j may be at least 1.2, in some cases at least 1.5, in some cases at least 2, in some cases at least 3, and in some cases even more. This ration may have any other suitable value in other embodiments.
[0201] In some examples of implementation, the pitch S.sub.t of the adjacent traction projections 58.sub.i, 58.sub.j may be such that at least two of the holes (i.e., windows) 40.sub.1-40.sub.H of the track 21 that succeed one another in the longitudinal direction of the track 21 are disposed between the adjacent traction projections 58.sub.i, 58.sub.j.
[0202] Moreover, in some examples of implementation, the pitch S.sub.t of the adjacent traction projections 58.sub.i, 58.sub.j may be such that at least two of the reinforcements 45.sub.x of the track 21 that succeed one another in the longitudinal direction of the track 21 are disposed between the traction projections 58.sub.i, 58.sub.j.
[0203] In some embodiments, as shown in FIG. 24, the pitch S.sub.t of adjacent ones of the traction projections 58.sub.1-58.sub.T may vary in the longitudinal direction of the track 21 such that the pitch S.sub.t of the adjacent traction projections 58.sub.i, 58.sub.j is different from the pitch S.sub.t of adjacent traction projections 58.sub.m, 58.sub.n.
[0204] For instance, in some embodiments, a ratio of the pitch S.sub.t of the adjacent traction projections 58.sub.i, 58.sub.j over the pitch S.sub.t of adjacent traction projections 58.sub.m, 58.sub.n may be at least 1, in some cases at least 1.5, in some cases at least 2, and in some cases even more.
[0205] In some embodiments, certain ones of the traction projections 58.sub.1-58.sub.T may be misaligned with respect to one another in the widthwise direction of the track 21. For instance, certain ones of the traction projections 58.sub.1-58.sub.T may not overlap with one another in the widthwise direction of the track 21. For example, certain traction projections 58.sub.1-58.sub.T may be "side" traction projections 58.sub.1-58.sub.T that are disposed substantially to a side of the track 21 in the widthwise direction of the track 21 while other ones of the traction projections 58.sub.1-58.sub.T may be "center" traction projections 58.sub.1-58.sub.T that are disposed substantially centrally of the track 21 in the widthwise direction of the track 21. A pitch of the side traction projections may be different from a pitch of the center traction projections. For example, a ratio of the pith of the side traction projections over the pitch of the center traction projections may be no more than 0.9, in some cases no more than 0.8, in some cases no more than 0.7, and in some cases even less. This ratio may have any suitable value in other embodiments.
5. Enhanced Resistance to Lateral Skidding
[0206] In some embodiments, as shown in FIGS. 25 and 26, the ground-engaging outer side 27 of the track 21 may be configured to oppose a tendency of the track 21 to skid sideways (i.e., laterally) when the snowmobile 10 is travelling in a given direction, such as, for example, when the snowmobile 10 is travelling on (e.g., crossing) a slope terrain 94 like a side hill or other inclined ground area.
[0207] For example, in some embodiments, the ground-engaging outer side 27 of the track 21 may comprise lateral stabilizers 96.sub.1-96.sub.n projecting from the ground-engaging outer surface 31 to oppose a tendency of the track 21 to skid transversely to a direction of motion of the snowmobile 10. In this embodiment, each of the lateral stabilizers 96.sub.1-96.sub.n comprises elastomeric material 98. The lateral stabilizers 96.sub.1-96.sub.n can be provided and connected to the carcass 35 in the mold during the track's molding process.
[0208] Where the snowmobile 10 travels such that there is a tendency of the track 21 to skid sideways to the snowmobile's direction of motion, such as on the slope terrain 94, the lateral stabilizers 96.sub.1-96.sub.n generate lateral forces that oppose the tendency of the track 21 to skid sideways. This may facilitate keeping the snowmobile 10 in its direction of motion on the slope terrain 94.
[0209] In this embodiment, the lateral stabilizers 96.sub.1-96.sub.n are located adjacent to the lateral edges 55.sub.1, 55.sub.2 of the track 21. In this example, the lateral stabilizers 96.sub.1-96.sub.n are located at longitudinal ends of respective ones of the traction projections 58.sub.1-58.sub.T.
[0210] In this embodiment, as shown in FIG. 27, each lateral stabilizer 96.sub.i is elongated transversally to the widthwise direction of the track 21. More particularly, the lateral stabilizer 96.sub.i has a longitudinal axis 67 that is transversal to the widthwise direction of the track 21 and defines its length L.sub.S, a width W.sub.L normal to its longitudinal axis 67, and a height H.sub.S in the thickness direction of the track 21. In this example, the longitudinal axis 67 of the lateral stabilizer 96.sub.i is substantially normal to the widthwise direction of the track 21, i.e., substantially parallel to the longitudinal direction of the track 21.
[0211] In this embodiment, the lateral stabilizer 96.sub.i protrudes, in the longitudinal direction, beyond a traction projection 58.sub.x at the end of which it is located. As such, the length L.sub.S of the lateral stabilizer 96.sub.i is greater than a front-to-rear dimension L.sub.L of the traction projection 58.sub.x. For example, in some cases a ratio L.sub.S/L.sub.L of the length of the lateral stabilizer 96.sub.i to the front-to-rear dimension L.sub.L of the traction projection 58.sub.x may be at least 1.2, in some cases at least 1.3, in some cases at least 1.4, in some cases at least 1.5, and in some cases even more (e.g., 2 or more).
[0212] The lateral stabilizers 96.sub.1-96.sub.n are arranged to occupy a significant part of a gap G.sub.T in the longitudinal direction of the track 21 between adjacent ones of the traction projections 58.sub.1-58.sub.T. For instance, in this embodiment, adjacent lateral stabilizers 96.sub.i, 96.sub.j occupy a significant part of the gap G.sub.T between adjacent traction projections 58.sub.i, 58.sub.j. For example, the lateral stabilizers 96.sub.i, 96.sub.j occupy at least a majority of the gap G.sub.T between the traction projections 58.sub.i, 58.sub.j, in some cases at least two-thirds the gap G.sub.T between the traction projections 58.sub.i, 58.sub.j, in some cases at least three-quarters of the gap G.sub.T between the traction projections 58.sub.i, 58.sub.j, and in some cases even more (e.g., up to an entirety of the gap G.sub.T between the traction projections 58.sub.i, 58.sub.j).
[0213] In a variant, with additional reference to FIG. 28, a single lateral stabilizer 96.sub.i may occupy at least majority of the gap G.sub.T between the traction projections 58.sub.i, 58.sub.j, in some cases at least two-thirds the gap G.sub.T between the traction projections 58.sub.i, 58.sub.j, in some cases at least three-quarters of the gap G.sub.T between the traction projections 61.sub.i, 61.sub.j, and in some cases even more (e.g., up to an entirety of the gap G.sub.T between the traction projections 61.sub.i, 61.sub.j).
[0214] In a variant, with additional reference to FIG. 29, the lateral stabilizers 96.sub.1-96.sub.n may be disposed at the longitudinal ends of selected ones of the traction projections 58.sub.1-58.sub.T, i.e., the lateral stabilizers 96.sub.1-96.sub.n may not be disposed at the longitudinal ends of each traction projection 58.sub.i. For instance, the lateral stabilizers may be distributed in the longitudinal direction of the track 21 such that a pitch of the lateral stabilizers (i.e., a spacing between adjacent lateral stabilizers 96.sub.i, 96.sub.j is different than the pitch S.sub.t of the traction projections 58.sub.1-58.sub.T. In this example, the lateral stabilizers 96.sub.1-96.sub.n are disposed at longitudinal ends of every second traction projection 58.sub.i in the longitudinal direction of the track 21. In other words, the pitch of the lateral stabilizers is twice the pitch S.sub.t of the traction projections 58.sub.1-58.sub.T. In other words, a ratio of the pitch of the lateral stabilizers 96.sub.1-96.sub.n over the pitch S.sub.t of the traction projections 58.sub.1-58.sub.T may be at least 1, in some cases at least 2, in some cases at least 3, in some cases at least 4, and in some cases even more.
[0215] In another variant, with additional reference to FIG. 30, a lateral stabilizer 96.sub.i may be located away from the lateral edges 55.sub.1, 55.sub.2 of the track 21. For instance, the lateral stabilizer 96.sub.i may be located remote from the longitudinal ends of the traction projections 58.sub.1-58.sub.T. For example, the lateral stabilizer 96.sub.i may be located in a center region of the track 21 (i.e., a center region in the widthwise direction of the track 21). More particularly, in this example, the lateral stabilizer 96.sub.i is located in a center third of the width W of the track 21.
[0216] In another variant, with additional reference to FIG. 31, the track 21 may comprise any number of lateral stabilizers 96.sub.1-96.sub.n that are spaced apart in the widthwise direction of the track 21 but overlapping in the longitudinal direction of the track 21. For instance, while the embodiment of FIG. 26 shows two lateral stabilizers 96.sub.i, 96.sub.j that are spaced apart in the widthwise direction of the track 21 and overlapping in the longitudinal direction of the track 21, in this variant, the track 21 may comprise at least three lateral stabilizers 96.sub.1-96.sub.n that are spaced apart in the widthwise direction of the track 21 and overlapping in the longitudinal direction of the track 21. In some cases, the track 21 may comprise more lateral stabilizers 96.sub.1-96.sub.n (e.g., four) that are spaced apart in the widthwise direction of the track 21 and overlapping in the longitudinal direction of the track 21.
[0217] In yet another variant, a lateral stabilizer 96.sub.i may be located between successive ones of the traction projections 58.sub.1-58.sub.T in the longitudinal direction of the track 21. For example, as shown in FIG. 32, each lateral stabilizer 96.sub.i may be located between successive ones of the traction projections 58.sub.1-58.sub.T in the longitudinal direction of the track 21 such that lateral stabilizers 96.sub.i, 96.sub.j that are spaced apart in the widthwise direction of the track 21 and overlapping in the longitudinal direction of the track 21 do not overlap with a traction projection 58.sub.i in the longitudinal direction of the track 21.
[0218] In some embodiments, as shown in FIG. 33, the ground-engaging outer side 27 of the track 21 may comprise uneven surfaces 102.sub.1-102.sub.U that project from the ground-engaging outer surface 31 and have a texture 104 to oppose a tendency of the track 21 to skid transversely to the direction of motion of the snowmobile 10. The uneven surfaces 102.sub.1-102.sub.U of the ground-engaging outer side 27 of the track 21 may be part of the traction projections 58.sub.1-58.sub.T and/or the lateral stabilizers 96.sub.1-96.sub.n, if present. For instance, the uneven surfaces 102.sub.1-102.sub.U may be part of a lateral surface (i.e., a surface facing transversally of the longitudinal direction of the track system 14) of the traction projections 58.sub.1-58.sub.T and/or the lateral stabilizers 96.sub.1-96.sub.n. For example, the uneven surfaces 102.sub.1-102.sub.U may be part of an outer lateral surface of a traction projections 58.sub.i (i.e., a lateral surface of a traction projections 58.sub.i that is closest to a lateral edge 55.sub.i of the track 21). Moreover, in some examples, as shown in FIG. 34, the uneven surfaces 102.sub.1-102.sub.U may be part of an outer lateral surface of a lateral stabilizer 96.sub.i (i.e., a lateral surface of a lateral stabilizer 96.sub.i that is closest to a lateral edge 55.sub.i of the track 21).
[0219] The texture 104 comprises a plurality of formations 106.sub.1-106.sub.F that increase friction to oppose a tendency of the track 21 to skid transversely to the direction of motion of the snowmobile 10. More particularly, the formations 106.sub.1-106.sub.F provide an increased number of ground-engaging faces on the lateral surfaces of the traction projections 58.sub.1-58.sub.T and/or the lateral stabilizers 96.sub.1-96.sub.n such that the traction projections 58.sub.1-58.sub.T and/or the lateral stabilizers 96.sub.1-96.sub.n have an increased frictional engagement with the ground to oppose a tendency of the track 21 to skid transversely to the direction of motion of the snowmobile 10.
[0220] The formations 106.sub.1-106.sub.F may be configured in various ways in various embodiments.
[0221] For instance, in some embodiments, as shown in FIG. 35A, the formations 106.sub.1-106.sub.F may be configured in a step-like manner such that the formations form steps 108.sub.1-108.sub.S in an ascending manner from a bottom portion to a top portion of the traction projection 58.sub.i. In other embodiments, as shown in FIGS. 35B and 35C, the formations 106.sub.1-106.sub.F may be configured to form projections 110.sub.1-110.sub.P. The projections 110.sub.1-110.sub.F may have any suitable shape. For instance, the projections 110.sub.1-110.sub.F may have a rectangular shape (as shown in FIG. 35B), a rounded shape, a triangular shape (as shown in FIG. 35C) or any other suitable shape. In yet other embodiments, as shown in FIG. 35D, the formations 106.sub.1-106.sub.F may be configured to form recesses 112.sub.1-112.sub.M.
[0222] The formations 106.sub.1-106.sub.F may be configured differently in other embodiments. For instance, the formations 106.sub.1-106.sub.F may be spaced evenly from one another as shown in FIGS. 35A to 35D or, alternatively, the formations 106.sub.1-106.sub.F may be unevenly spaced from one another such that a pitch defined between successive ones of the formations 106.sub.1-106.sub.F varies. Moreover, the formations 106.sub.1-106.sub.F may extend along only a portion of the height of the traction projection 58.sub.i and/or a height of the lateral stabilizer 96.sub.i. For example, as shown in FIG. 37, the formations 106.sub.1-106.sub.F may extend along a top portion 107 of the traction projection 58.sub.i while a bottom portion 109 of the traction projection 58.sub.i may not comprise any of the formations 106.sub.1-106.sub.F. The top portion 107 of the traction projection 58.sub.i may correspond to at least 10% of a height H of the traction projection 58.sub.i, in some cases at least 30%, in some cases at least 50%, in some cases at least 60%, and in some cases even more (e.g., 70%). In a similar manner, the formations 106.sub.1-106.sub.F may extend along a top portion of the lateral stabilizer 96.sub.i.
[0223] In a variant, the uneven surfaces 102.sub.1-102.sub.U may be able to bend. More specifically, as shown in FIG. 38, an uneven surface 102.sub.i extending along the top portion 107 of the traction projection 58.sub.i may bend relative to the bottom portion 109 of the traction projection 58.sub.i. This may be useful to further oppose the tendency of the track 21 to skid due to a sloped terrain. For instance, this may enhance a grabbing action of the uneven surface 102.sub.i with the ground.
[0224] In another variant, with additional reference to FIGS. 79 to 81, a traction projection 58i may comprise a plurality of lateral stabilizers 296.sub.1-296.sub.S configured to increase a lateral restrictive force exerted by the traction projection 58.sub.i. The traction projections 58.sub.1-58.sub.T comprising the lateral stabilizers 296.sub.1-296.sub.S may be disposed in a staggered arrangement on the ground-engaging outer side 27 of the track 21. In other words, at least a majority of (i.e., a majority or an entirety of) a given traction projection 58.sub.i may be offset from an adjacent traction projection 58.sub.j (i.e., may not overlap the adjacent traction projection 58.sub.j) in the widthwise direction of the track 21.
[0225] Considering a cross-section of the traction projection 58.sub.i normal to the thickness direction of the track 21, a dimension D.sub.1 of each lateral stabilizer 296.sub.i in the longitudinal direction of the track 21 is greater than a dimension D.sub.2 of the lateral stabilizer 296.sub.i in the widthwise direction of the track 21. For instance, in some embodiments, a ratio of the dimension D.sub.1 of the lateral stabilizer 296.sub.i over the dimension D.sub.2 of the lateral stabilizer 296.sub.i may be at least 3, in some cases at least 4, in some cases at least 5, and in some cases even more (e.g., 6).
[0226] The number of lateral stabilizers 296.sub.1-296.sub.S per traction projection 58.sub.i may be significant. For instance, in some embodiments, the traction projection 58.sub.i may comprise at least three lateral stabilizers 296.sub.1-296.sub.S, in some cases at least four lateral stabilizers 296.sub.1-296.sub.S, in some cases at least five lateral stabilizers 296.sub.1-296.sub.S, and in some cases even more (e.g., six or more).
[0227] In this example, the traction projection 58.sub.i also comprises a plurality of propulsive protrusions 298.sub.1-298.sub.P configured to propel the snowmobile 10 and disposed between adjacent ones of the lateral stabilizers 296.sub.1-296.sub.S. The propulsive protrusions 298.sub.1-298.sub.P are longer in the widthwise direction of the track 21 than the lateral stabilizers 296.sub.1-296.sub.S. That is, a dimension D.sub.3 of a propulsive protrusion 298.sub.i in the widthwise direction of the track 21 is greater than the dimension D.sub.2 of a lateral stabilizer 296.sub.i.
[0228] The propulsive protrusions 298.sub.1-298.sub.P may be shaped to improve traction by causing the traction projection 58i to contain snow or other ground matter on which the track 21 travels, as will be further discussed later. For instance, the propulsive protrusions 298.sub.1-298.sub.P may be shaped to create a "scooping" effect of the traction projection 58.sub.i on the snow or other ground matter on which the track 21 travels. To that end, in this embodiment, the propulsive protrusions 298.sub.1-298.sub.P are curved or otherwise shaped to respectively form a plurality of recesses 300.sub.1-300.sub.P in which snow or other ground matter may be more easily accumulated by the traction projection 58i. For instance, in some examples, a recess 300.sub.i of a propulsive protrusion 298.sub.i may be shaped such that propulsive protrusion 298.sub.i implements a "scoop" or "cup" to scoop or cup the snow or other ground matter. In particular, in this example, the propulsive protrusions 298.sub.1-298.sub.P are curved along a plane that is normal to the height direction of the track 21. For example, each of the propulsive protrusions 298.sub.1-298.sub.P may be U-shaped, V-shaped or shaped in any other suitable manner such as to form the recesses 300.sub.1-300.sub.P.
[0229] In some embodiments, selected ones of the propulsive protrusions 298.sub.1-298.sub.P may be curved or otherwise shaped to form the recesses 300.sub.1-300.sub.P, while other ones of the propulsive protrusions 298.sub.1-298.sub.P may not be curved (e.g., flat). In other embodiments, all of the propulsive protrusions 298.sub.1-298.sub.P may not be curved (e.g., flat).
[0230] The traction projection 58.sub.i comprising the lateral stabilizers 296.sub.1-296.sub.S and the propulsive protrusions 298.sub.1-298.sub.P may have a significant height HT. For instance, in some embodiments, the height HT of the traction projection 58.sub.i may be at least 1.5 inches, in some cases at least 1.75 inches, in some cases at least 2 inches, and in some cases even more (e.g., 2.5 or 3 inches). Such a configuration of the traction projection 58.sub.i may be particularly useful in a mountainous environment as lateral forces exerted on the track 21 may be more significant.
[0231] Furthermore, in this example of implementation, as shown in FIG. 81, the traction projection 58.sub.i comprises a flap 302 that can deflect (e.g., bend) in response to a lateral force to increase a surface area of the traction projection 58.sub.i that is transversal to the widthwise direction of the track 21.
[0232] The flap 302 has a deflected state and an undeflected state. In its undeflected state, the flap 302 is positioned transversally to the longitudinal direction of the track 21 while in its deflected state, the flap 302 is positioned transversally to the widthwise direction of the track 21. In its undeflected state, a surface area of the flap 302 transversal to the widthwise direction of the track 21 is smaller than in the deflected state of the flap 302.
[0233] The flap 302 protrudes from a given lateral stabilizer 296.sub.i in a direction transverse to the longitudinal direction of the track 21. The flap 302 may be disposed on an inner side of the traction projection 58.sub.i (i.e., a side of the traction projection 58.sub.i that is closest to a center of the track 21) or on an outer side of the traction projection 58.sub.i (i.e., a side of the traction projection 58.sub.i that is closest to a given one of the lateral edges 55.sub.1, 55.sub.2 of the track 21).
[0234] In this example, the flap 302 tapers in the height direction of the track 21. More specifically, a top portion of the flap 302 has a greater extent in a direction transverse to the longitudinal direction of the track 21 than a bottom portion of the flap 302 such that an extent of the flap 302 in a direction transverse to the longitudinal direction of the track 21 decreases downwardly from the top portion of the flap 302. Moreover, in this example, the flap 302 is in contact with the ground-engaging outer surface 31 of the track 21. In other examples, the flap 302 may not be in contact with the ground-engaging outer surface 31 and may instead be solely in contact with the lateral stabilizer 296.sub.i. The flap 302 may be configured differently in other examples.
6. Traction Projections Configured to Contain Snow or Other Ground Matter
[0235] In some embodiments, as shown in FIGS. 79 to 85, a traction projection 58.sub.i may be configured to contain snow or other ground matter from the ground to enhance traction. That is, the traction projection 58.sub.i comprises a containment space 304 to contain an amount of snow or other ground matter when the traction projection 58.sub.i engages the ground. This may help to compact the amount of snow or other ground matter contained in the traction projection 58.sub.i and thus allow the traction projection 58.sub.i to press more on the compacted snow or other ground matter, thereby generating greater tractive forces. For instance, the containment space 304 of the traction projection 58.sub.i may create a "scooping" or "cupping" action to scoop or cup the snow or other ground matter. The scooping or cupping action may further be amplified when the traction projection 58i deforms as it engages the snow or other ground matter and causes the containment space 304 to expand.
[0236] The containment space 304 of the traction projection 58.sub.i may be sized such that the amount of snow or other ground matter it can contain may be relatively significant, as this may further improve traction.
[0237] In this embodiment, the containment space 304 of the traction projection 58.sub.i comprises a plurality of containment voids 306.sub.1-306.sub.4 to contain respective portions of the amount of snow or other ground matter contained by the traction projection 58.sub.i. More particularly, in this embodiment, the traction projection 58.sub.i comprises the propulsive protrusions 298.sub.1-298.sub.P and each of the containment voids 306.sub.1-306.sub.4 is implemented by a respective one of the recesses 300.sub.1-300.sub.P defined by the propulsive protrusions 298.sub.1-298.sub.P.
[0238] In this example, the recesses 300.sub.1-300.sub.P implementing the containment voids 306.sub.1-306.sub.4 are distributed in a longitudinal direction of the traction projection 58.sub.i, which in this case corresponds to the widthwise direction of the track 21. This allows the traction projection 58.sub.i to contain the snow or other ground matter over a significant part of the length L of the traction projection 58.sub.i.
[0239] For instance, in some embodiments, the containment space 304 of the traction projection 58.sub.i may occupy at least a majority (e.g., a majority or an entirety) of the length L of the traction projection 58.sub.i. For example, in some embodiments, the containment space 304 of the traction projection 58.sub.i may occupy at least 60%, in some cases at least 70%, in some cases at least 80%, in some cases at least 90%, and in some cases an entirety of the length L of the traction projection 58.sub.i.
[0240] In this regard, in this embodiment, each of the recesses 300.sub.1-300.sub.P of the containment space 304 of the traction projection 58.sub.i may occupy a significant part of the length L of the traction projection 58.sub.i. For example, in some embodiments, a recess 300.sub.i of the containment space 304 of the traction projection 58.sub.i may occupy at least 10%, in some cases at least 15%, in some cases at least 20%, in some cases at least 25%, and in some cases an even larger part of the length L of the traction projection 58.sub.i.
[0241] The containment space 304 of the traction projection 58.sub.i may therefore be viewed as imparting an "effective" length L.sub.eff of the traction projection 58.sub.i that exceeds the (actual) length L of the traction projection 58.sub.i. Basically, the traction projection 58.sub.i may be viewed as generating more traction as if it was effectively longer. The effective length L.sub.eff of the traction projection 58.sub.i can be measured by measuring a line that follows a shape of the traction projection 58.sub.i from the first longitudinal end 308.sub.1 of the traction projection 58.sub.i to the second longitudinal end 308.sub.2 of the traction projection 58.sub.i. Conceptually, this can be viewed as that length the traction projection 58.sub.i would have if it was straightened by straightening segments that are non-straight in the longitudinal direction of the traction projection 58.sub.i (which in this case corresponds to the widthwise direction of the track 21), i.e., the propulsive protrusions 298.sub.1-298.sub.P defining the recesses 300.sub.1-300.sub.P in this example, such that they are straight in the longitudinal direction of the traction projection 58.sub.i.
[0242] For instance, in some embodiments, a ratio L.sub.eff/L of the effective length L.sub.eff of the traction projection 58.sub.i over the length L of the traction projection 58.sub.i may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.4, and in some cases even more.
[0243] Also, in this embodiment, the containment space 304 of the traction projection 58.sub.i may occupy at least a majority (e.g., a majority or an entirety) of the height H of the traction projection 58.sub.i. For example, in some embodiments, the containment space 304 of the traction projection 58.sub.i may occupy at least 60%, in some cases at least 70%, in some cases at least 80%, in some cases at least 90%, and in some cases an entirety of the height H of the traction projection 58.sub.i.
[0244] In this example of implementation, this may be particularly useful as the height H of traction projection 58.sub.i is relatively significant. For instance, in some embodiments, the height H of the traction projection 58.sub.i may be at least 1.5 inches, in some cases at least 1.75 inches, in some cases at least 2 inches, and in some cases even more (e.g., 2.5 or 3 inches).
[0245] In this regard, in this embodiment, each of the recesses 300.sub.1-300.sub.P of the containment space 304 of the traction projection 58.sub.i may occupy at least a majority of the height H of the traction projection 58.sub.i. For example, in some embodiments, a recess 300.sub.i of the containment space 304 of the traction projection 58.sub.i may occupy at least 60%, in some cases at least 70%, in some cases at least 80%, in some cases at least 90%, and in some cases an entirety of the height H of the traction projection 58.sub.i.
[0246] The amount of snow or other ground matter that can be contained in the containment space 304 of the traction projection 58.sub.i may thus be significant. This can be measured as a volume V of the containment space 304 of the traction projection 58.sub.i in which the amount of snow or other ground matter can be contained. For instance, in some embodiments, the volume V of the containment space 304 of the traction projection 58.sub.i may be at least 0.8 in.sup.3, in some cases at least 1 in.sup.3, in some cases at least 1.2 in.sup.3, in some cases at least 1.4 in.sup.3 and in some cases even more. For instance, in some cases, a ratio V/L of the volume V of the containment space 304 over the length L of the traction projection 58.sub.i may be at least 0.3 in.sup.3/in, in some cases at least 0.5 in.sup.3/in, in some cases at least 0.8 in.sup.3/in, and in some cases even more.
[0247] In this embodiment, as shown in FIG. 83, the volume V of the containment space 304 of the traction projection 58.sub.i corresponds to a sum of volumes v.sub.1-v.sub.4 of the recesses 300.sub.1-300.sub.P that can contain the snow or other ground matter. In this example, a volume v.sub.i of a recess 300.sub.i may be relatively significant. For instance, in some embodiments, the volume v.sub.i of the recess 300.sub.i may be at least at least 10%, in some cases at least 15%, in some cases at least 20%, in some cases at least 25%, and in some cases an even larger part of the volume V of the containment space 304 of the traction projection 58.sub.i.
[0248] The propulsive protrusions 298.sub.1-298.sub.P defining the recesses 300.sub.1-300.sub.P of the containment space 304 of the traction projection 58.sub.i may be shaped in any suitable way. In this embodiment, each propulsive protrusion 298.sub.i is curved to define its recess 300.sub.i. More particularly, in this embodiment, the propulsive protrusion 298.sub.i is generally U-shaped such that its recess 300.sub.i is also U-shaped. The recess 300.sub.i is open facing the ground as the traction projection 58.sub.i approaches the ground while the track 21 moves around the track-engaging assembly 24 when the snowmobile 10 travels forward.
[0249] In this example of implementation, the traction projection 58.sub.i, including the propulsive protrusions 298.sub.1-298.sub.P and the lateral stabilizers 296.sub.1-296.sub.S, tapers in the thickness direction of the track 21. That is, a top portion 310 of the traction projection 58.sub.i has a smaller cross-sectional area than a bottom portion 312 of the traction projection 58.sub.i adjacent to the outer surface 31 of the carcass 35. This may help to strengthen the traction projection 58.sub.i given its height and its containment space 304 which are relatively significant.
[0250] More particularly, in this example of implementation, the top portion 310 of the traction projection 58.sub.i is smaller in the longitudinal direction of the track 21 than the bottom portion 312 of the traction projection 58.sub.i. In this case, a top portion 314 of each lateral stabilizer 296.sub.i is smaller in the longitudinal direction of the track 21 than a bottom portion 316 of the lateral stabilizer 296.sub.i, while a top portion 318 of each propulsive protrusion 298.sub.i is smaller in the longitudinal direction of the track 21 than a bottom portion 320 of the propulsive protrusion 298.sub.i.
[0251] For instance, in some embodiments, a ratio of a dimension D.sub.1-b of the bottom portion 316 of the lateral stabilizer 296.sub.i in the longitudinal direction of the track 21 over a dimension D.sub.1-t of the top portion 314 of the lateral stabilizer 296.sub.i in the longitudinal direction of the track 21 may be at least 1.1, in some cases at least 1.2, in some cases at least 1.5, and in some cases even more (e.g., 2), and/or a ratio of a dimension D.sub.4-b of the bottom portion 320 of the propulsive protrusion 298.sub.i in the longitudinal direction of the track 21 over a dimension D.sub.4-t of the top portion 318 of the propulsive protrusion 298.sub.i in the longitudinal direction of the track 21 may be at least 1.1, in some cases at least 1.2, in some cases at least 1.5, and in some cases even more (e.g., 2).
[0252] Also, in some embodiments, the dimension D.sub.1-t of the top portion 314 of the lateral stabilizer 296.sub.i may be significantly greater than the dimension D.sub.4-t of the top portion 318 of the propulsive protrusion 298.sub.i. For instance, in some cases, a ratio D.sub.1-t/D.sub.4-t of the dimension D.sub.1-t of the top portion 314 of the lateral stabilizer 296.sub.i over the dimension D.sub.4-t of the top portion 318 of the propulsive protrusion 298.sub.i may be at least 2, in some cases at least 3, in some cases at least 4 and in some cases even more. This significant difference between the dimensions D.sub.1-t and D.sub.4-t may allow the containment space 304 of the traction projection 58.sub.i to be bigger and thus compact more snow or other ground matter.
[0253] FIGS. 86 to 89 show a similar embodiment in which at least one of the traction projections 58.sub.1-58.sub.T of the track 21 is configured to contain snow or other ground matter from the ground to enhance traction. The containment space 304 in this embodiment is reduced due to a smaller size of the propulsive protrusions 298.sub.1-298.sub.P.
[0254] Furthermore, as shown in FIG. 89, in some embodiments, a traction projection 58.sub.i may comprise a strengthener 315 for reinforcing a given one of the propulsive protrusions 298.sub.1-298.sub.P. The strengthener 315 is positioned such as to face away from the ground as the traction projection 58.sub.i approaches the ground while the track 21 moves around the track-engaging assembly 24 when the snowmobile 10 travels forward. In other words, the strengthener 315 is disposed on a side of the traction projection 58.sub.i that is opposite to the recesses 300.sub.1-300.sub.P of the containment space 304 of the traction projection 58.sub.i. The strengthener 315 is disposed adjacent to a propulsive protrusion 298.sub.i in the longitudinal direction of the track 21 such as to reinforce the propulsive protrusion 298.sub.i when the propulsive protrusion 298.sub.i engages the ground. This may help minimize wear of the traction projection 58.sub.i. In this embodiment, the strengthener 315 comprises an elongated rib that extends in the height direction of the track 21. A height of the strengthener 315 may be significant. For instance, the height of the strengthener 315 may be equal to a majority or an entirety of the height H of the traction projection 58.sub.i. In this embodiment, the strengthener 315 is integral with the remainder of the traction projection 58.sub.i such that it is formed together with the traction projection 58.sub.i.
[0255] The strengthener 315 may be configured in other ways in other embodiments. For instance, the strengthener 315 may be shaped differently or its height may be less than a majority of the height H of the traction projection 58.sub.i.
[0256] Furthermore, a given traction projection 58.sub.i may comprise more than one strengthener 315. Notably, in this example of implementation, the traction projection 58.sub.i comprises two strengtheners 315, each strengthener 315 being configured to reinforce a respective propulsive protrusion 298.sub.i. Thus, in some embodiments, each propulsive protrusion 298.sub.i may be associated with a corresponding strengthener 315, or one or more of the propulsive protrusions 298.sub.1-298.sub.P may be free of a strengthener 315.
7. Adaptable Track
[0257] In some embodiments, as shown in FIG. 39, one or more components of the track 21 (e.g., the traction projections 58.sub.1-58.sub.T, the carcass 35, the drive/guide lugs 34.sub.1-34.sub.D) may be adaptable in response to a stimulus (e.g., temperature, humidity, loading, a signal, etc.) such that a state of a given component of the track 21 (e.g., a stiffness or other property; a shape; and/or any other characteristic of the given component of the track) is variable in different conditions (e.g., weather conditions; ground conditions, such as different types of snow, soil, etc.; and/or other conditions) in order to better perform in specified conditions.
7.1 Adaptable Traction Projections
[0258] In some embodiments, as shown in FIG. 40, respective ones of the traction projections 58.sub.1-58.sub.T may be adaptable in response to a stimulus (e.g., temperature, humidity, loading, a signal, etc.) such that a state of a traction projection 58.sub.i (e.g., a stiffness, hardness, or other property; a shape; and/or any other characteristic of the traction projection 58.sub.i) is variable in different conditions (e.g., weather conditions; ground conditions, such as different types of snow, soil, etc.; and/or other conditions) in order to better perform in specified conditions. For example, in some embodiments, the traction projection 58.sub.i may be less stiff (e.g., softer) and/or less straight (e.g., bent) in powder snow (or other looser matter on the ground) than in wet snow (or other denser matter on the ground).
7.1.1 Adaptable Stiffness
[0259] In some embodiments, as shown in FIG. 41, a stiffness of a traction projection 58.sub.i may be adaptable in response to a stimulus such that the traction projection 58.sub.i is stiffer in a first condition than in a second condition. That is, the stiffness of the traction projection 58.sub.i changes based on the stimulus.
[0260] For instance, in some embodiments, the stiffness of the traction projection 58.sub.i may change based on a stimulus associated with an environmental parameter of an environment of the traction projection 58.sub.i.
[0261] For example, the stiffness of the traction projection 58.sub.i may be lower when the traction projection 58.sub.i is in powder snow (or other looser matter on the ground) than when the traction projection 58.sub.i is in wet/spring snow (or other denser matter on the ground). Wet/spring snow is defined here as snow with a humidity of more than 3%.
[0262] More specifically, a ratio of the stiffness of the traction projection 58.sub.i in powder snow over the stiffness of the traction projection 58.sub.i in wet/spring snow may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.5, in some cases at least 2, and in some cases even more (e.g., 3 or more).
[0263] In some embodiments, the stiffness of the traction projection 58.sub.i may be lower when the humidity of the environment of the traction projection 58.sub.i is lower. For example, the stiffness of the traction projection 58.sub.i may be lower when the humidity of the snow that the traction projection 58.sub.i engages is lower.
[0264] For instance, a ratio of the stiffness of the traction projection 58.sub.i when the humidity has a given value over the stiffness of the traction projection 58.sub.i when the humidity has a lower value than the given value may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.5, in some cases at least 2, and in some cases even more (e.g., 3 or more).
[0265] In some embodiments, the stiffness of the traction projection 58.sub.i may be lower when a temperature of the environment of the traction projection 58.sub.i is lower.
[0266] For instance, a ratio of the stiffness of the traction projection 58.sub.i when the temperature has a given value over the stiffness of the traction projection 58.sub.i when the temperature has a lower value than the given value may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.5, in some cases at least 2, and in some cases even more (e.g., 3 or more).
[0267] In some cases, the stiffness of the traction projection 58.sub.i may be lower when snow (or other matter on the ground) that the traction projection 58.sub.i engages is softer. For instance, the stiffness of the traction projection 58.sub.i may be lower when loading (e.g., impacts) on the traction projection 58.sub.i is lower.
[0268] For instance, a ratio of the stiffness of the traction projection 58.sub.i when the snow (or other matter on the ground) that the traction projection 58.sub.i engages has a given hardness over the stiffness of the traction projection 58.sub.i when the snow (or other matter on the ground) that the traction projection 58.sub.i engages has a lower hardness may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.5, in some cases at least 2, and in some cases even more (e.g., 3 or more). The difference in hardness of the snow (or other matter on the ground) that the traction projection 58.sub.i engages over which this ratio may apply may be no more than a certain value.
[0269] The stiffness of the traction projection 58.sub.i may be observed in any suitable way in various embodiments.
[0270] For example, a material 114 of the traction projection 58.sub.i may vary in stiffness. For instance, a modulus of elasticity of the material 114 of the traction projection 58.sub.i may vary based on the stimulus.
[0271] More particularly, a ratio of the modulus of elasticity of the material 114 of the traction projection 58.sub.i in the first condition over the modulus of elasticity of the material 114 of the traction projection 58.sub.i in the second condition may be at least 2, in some cases at least 3, in some cases at least 4, and in some cases even more (e.g., 4.5 or more). For instance, the modulus of elasticity may be Young's modulus or the 100% modulus for the material 114 of the traction projection 58.sub.i.
[0272] In some embodiments, a hardness of the material 114 of the traction projection 58.sub.i may vary based on the stimulus.
[0273] For instance, a ratio of the hardness of the material 114 of the traction projection 58.sub.i in the first condition over the hardness of the material 114 of the traction projection 58.sub.i in the second condition may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.5, in some cases at least 2, and in some cases even more (e.g., 3 or more).
[0274] The material 114 of the traction projection 58.sub.i may be any suitable material. For example, in some embodiments, as shown in FIG. 42, the material 114 may be the rubber 41 of the traction projection 58.sub.i. In other embodiments, as shown in FIG. 43 the material 114 may interface with the rubber 41 of the traction projection 58.sub.i. That is, the traction projection 58.sub.i may comprise an adaptable member 116 that includes the material 114 and that interfaces with the rubber 41 of the traction projection 58.sub.i. The adaptable member 116 may be at least partially embedded in the rubber 41 of the traction projection 58.sub.i. For example, the adaptable member 116 may be a core within the rubber 41 of the traction projection 58.sub.i.
[0275] In some embodiments, as shown in FIG. 44, the adaptable member 116 may be at an outer surface of the rubber 41 of the traction projection 58.sub.i. For example, the adaptable member 116 may be a cover of the traction projection 58.sub.i that covers the rubber 41 of the traction projection 58.sub.i.
[0276] The adaptable member 116 and its material 114 may be provided in the traction projection 58.sub.i in any suitable way. For instance, in embodiments in which the adaptable 116 is at least partially embedded within the rubber 41 of the traction projection 58.sub.i, the adaptable member 116 may be formed in a first molding operation and then overmolded by the rubber 41 of the traction projection 58.sub.i in a subsequent molding operation. Conversely, in embodiments in which the adaptable member 116 at the outer surface of the rubber 41 of the traction projection 58.sub.i, the rubber 41 may be formed in a first molding operation and then overmolded by the material 114 to form the adaptable member that covers the rubber 41 in a subsequent molding operation.
[0277] The adaptability of the stiffness of the traction projection 58.sub.i may be implemented in any suitable way.
[0278] In some embodiments, the material 114 may have a property related to the stiffness, such as its modulus of elasticity and/or hardness, that varies considerably over a range of values of the stimulus to which the traction projection 58.sub.i is expected to be exposed during use.
[0279] For instance, in some embodiments, the property related to the stiffness of the material 114 may vary considerably over a range of temperatures to which the traction projection 58.sub.i is expected to be exposed during use. For example, the property related to the stiffness of the material 114 may vary between 0 and -30.degree. C., in some cases between 0 and -20.degree. C., and in some cases between 0 and -10.degree. C.
[0280] In some embodiments, the property related to the stiffness of the material 114 may vary considerably over a range of humidity to which the traction projection 58.sub.i is expected to be exposed during use. For example, the property related to the stiffness of the material 114 may vary between 0% and 1% humidity, in some cases between 0% and 2% humidity, in some cases between 0% and 3% humidity, in some cases between 0% and 4% humidity, and in some cases between 0% and 5% humidity.
[0281] In some embodiments, the material 114 may be a rate-dependent material. That is, the property related to the stiffness of the material 114 (e.g., modulus of elasticity and/or hardness of the material 114) may vary based on a rate of change of a force applied on the traction projection 58.sub.i. For example, the material 114 may comprise a rate-dependent foam that is characterized as possessing a load-response behavior that resists sudden-movement rapid compression, yet is less resistive to slow-movement compression.
[0282] Furthermore, in some embodiments, the material 114 may be a non-Newtonian material (i.e., a non-Newtonian fluid) having a viscosity that is dependent on shear rate or shear rate history.
7.1.2 Adaptable Shape
[0283] In some embodiments, as shown in FIG. 45, a shape of a traction projection 58.sub.i may be adaptable in response to a stimulus such that the shape of the traction projection 58.sub.i is different in a first condition than in a second condition. That is, the shape of the traction projection 58.sub.i changes based on the stimulus. This change in shape of the traction projection 58.sub.i is distinct from any change in shape of the traction projection 58.sub.i that may occur when the traction projection 58.sub.i contacts the ground and ceases to contact the ground.
[0284] For instance, the shape of the traction projection 58.sub.i may have a greater "packing" effect and/or "scooping" effect in powder snow than in wet/spring snow. For example, the shape of the traction projection 58.sub.i may be less straight (e.g., bent) in powder snow (or other looser matter on the ground) than in wet/spring snow (or other denser matter on the ground). This may allow an improved floatation of the track 21 on powder snow.
[0285] More particularly, as shown in FIG. 46, an angle .theta..sub.1 between a portion 118 of the traction projection 58.sub.i and the height direction of the track 21 may be different in powder snow than in wet/spring snow. For instance, the angle .theta..sub.1 may be greater in powder snow than wet/spring snow. For example, a ratio of .theta..sub.1 in powder snow over .theta..sub.1 in wet/spring snow may be at least 1.1, in some cases at least 1.2, in some cases at least 1.3, in some cases at least 1.5, in some cases at least 2, and in some cases even more (e.g., 3 or more).
[0286] In some cases, the portion 118 of the traction projection 58.sub.i may be substantially vertical or nearly vertical (i.e., the angle .theta..sub.1 may be or be close to 0.degree.) in wet/spring snow. In other cases, the portion 118 of the traction projection 58.sub.i may be inclined in wet/spring snow, but may be more inclined in powder snow.
[0287] For example, in wet/spring snow, the angle .theta..sub.1 may be no more than 30.degree., in some cases no more than 20.degree., in some cases no more than 10.degree., and in some cases 0.degree., while, in powder snow, the angle .theta..sub.1 may be at least 30.degree., in some case at least 40.degree., in some cases at least 50.degree., and in some cases even more.
[0288] In some embodiments, as shown in FIG. 47, an angle .
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
D00010
D00011
D00012

D00013

D00014

D00015

D00016

D00017

D00018

D00019

D00020

D00021

D00022

D00023

D00024

D00025

D00026
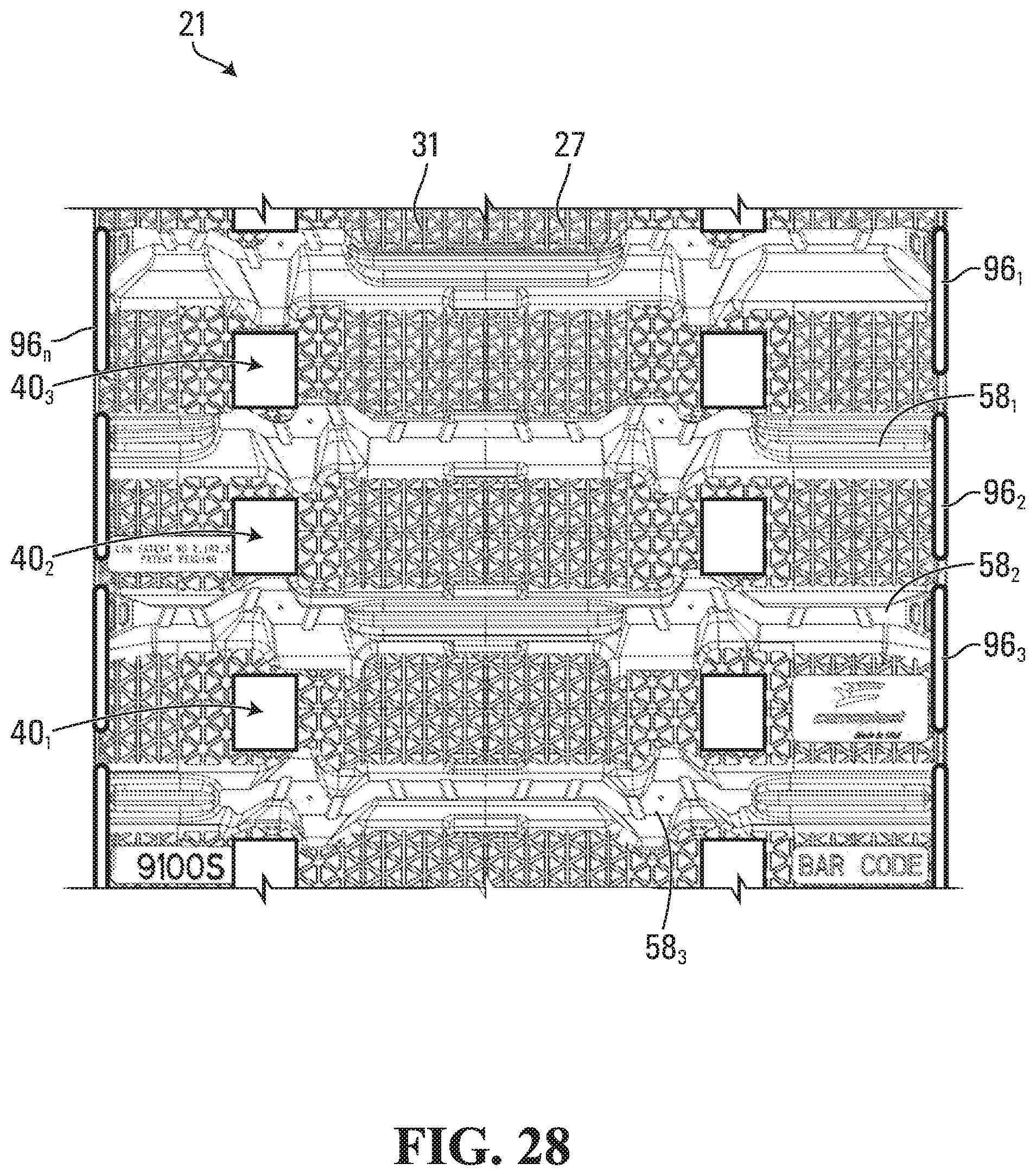
D00027

D00028

D00029

D00030

D00031
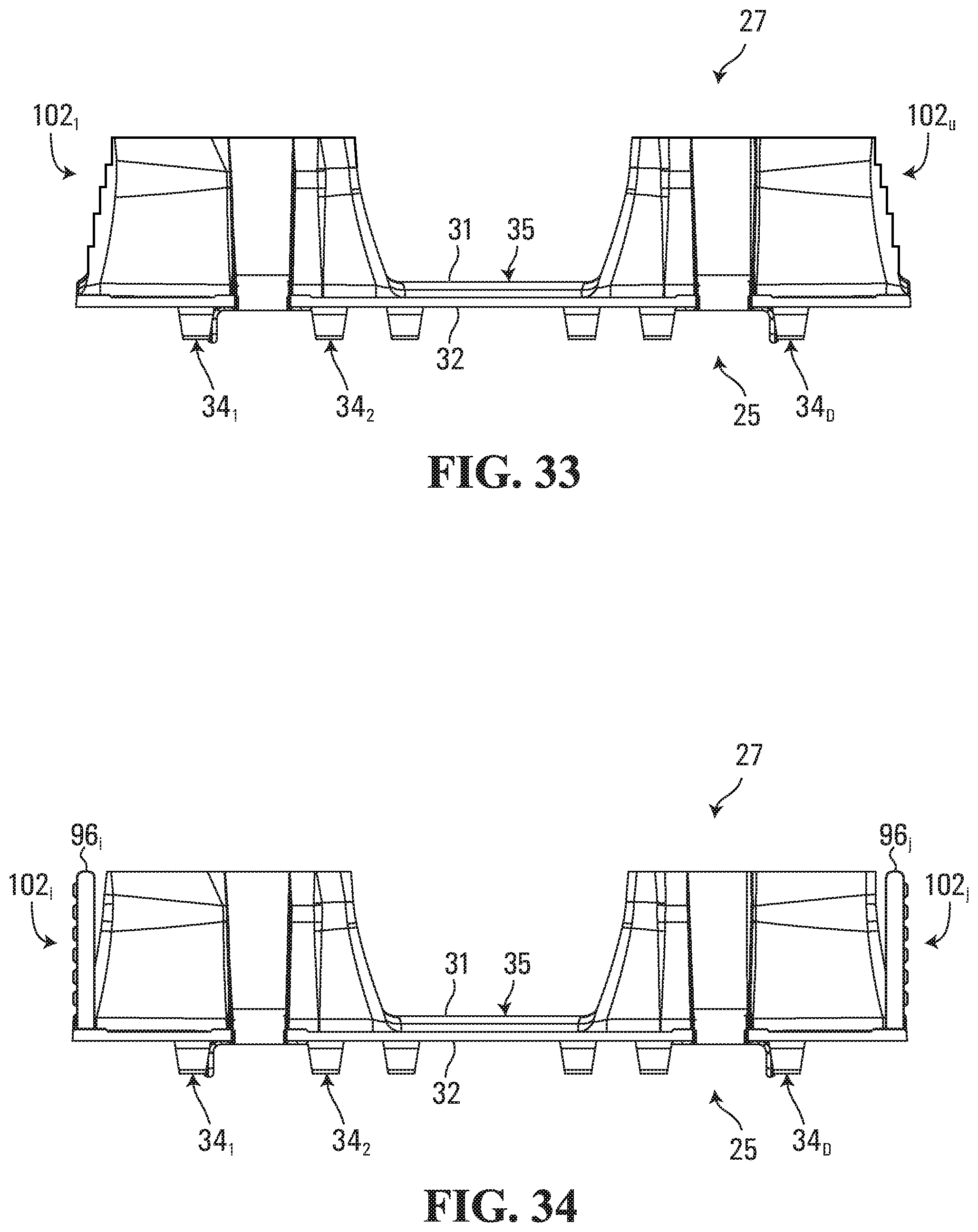
D00032

D00033

D00034

D00035

D00036
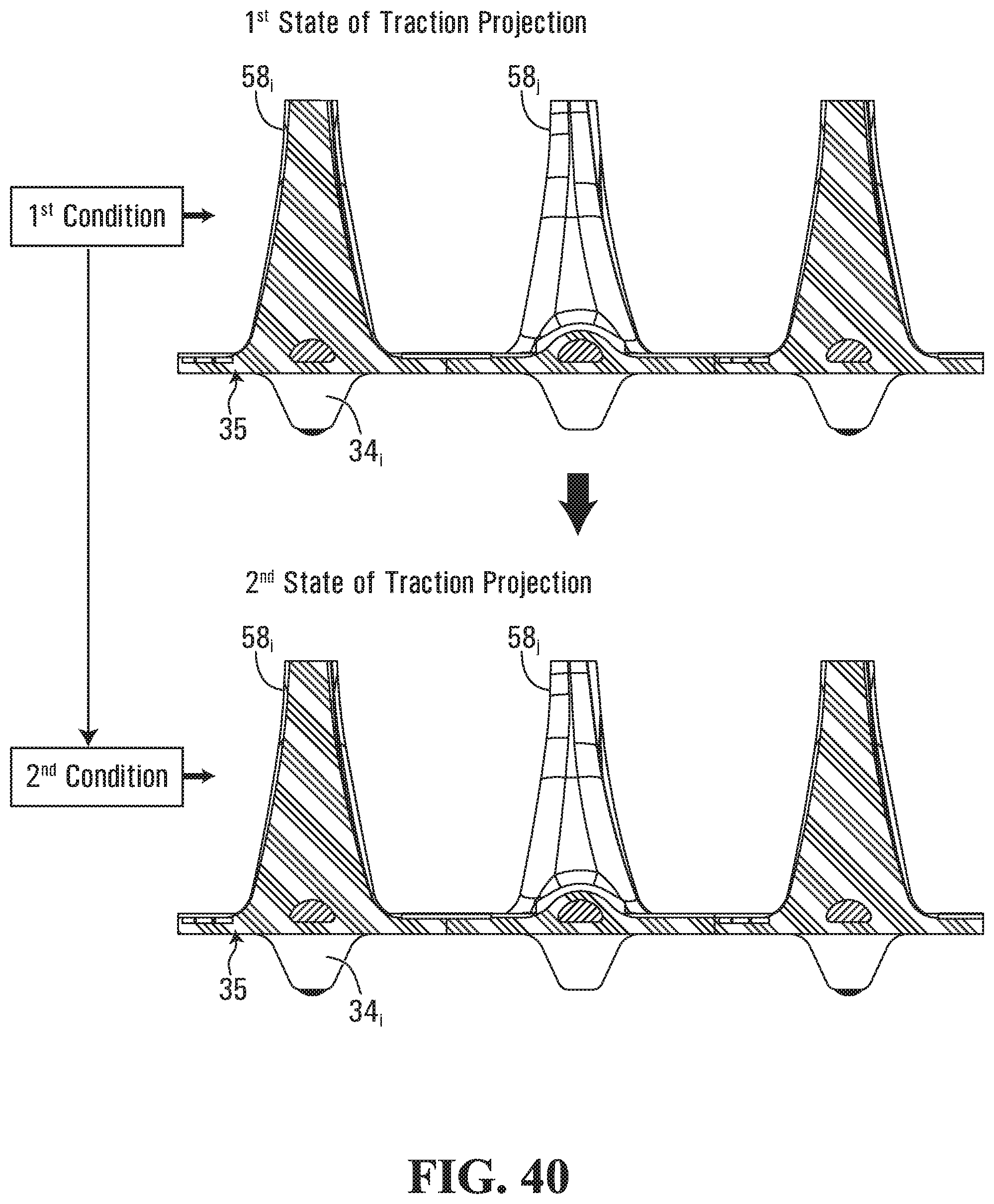
D00037

D00038

D00039

D00040

D00041

D00042

D00043

D00044
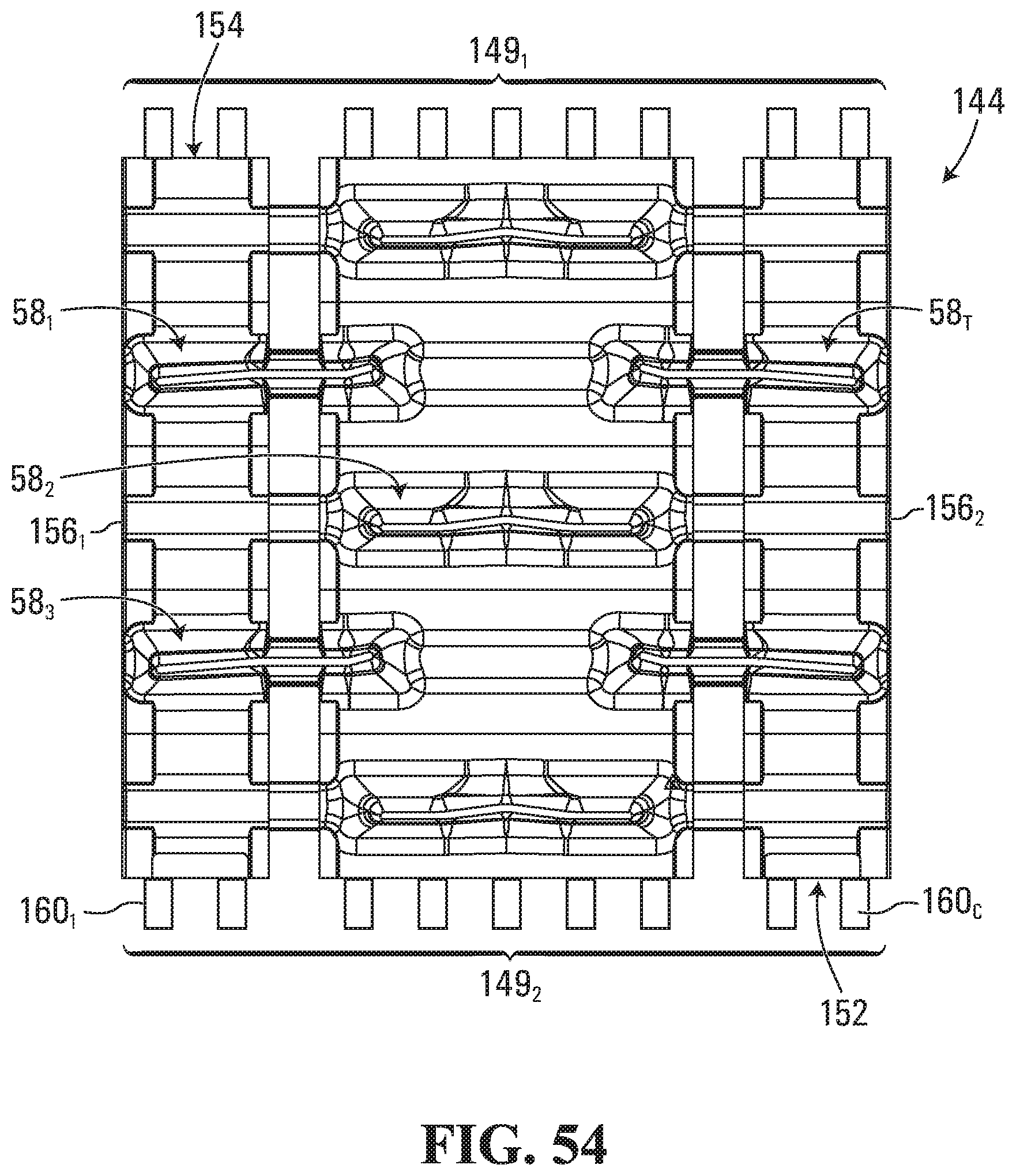
D00045

D00046

D00047

D00048

D00049
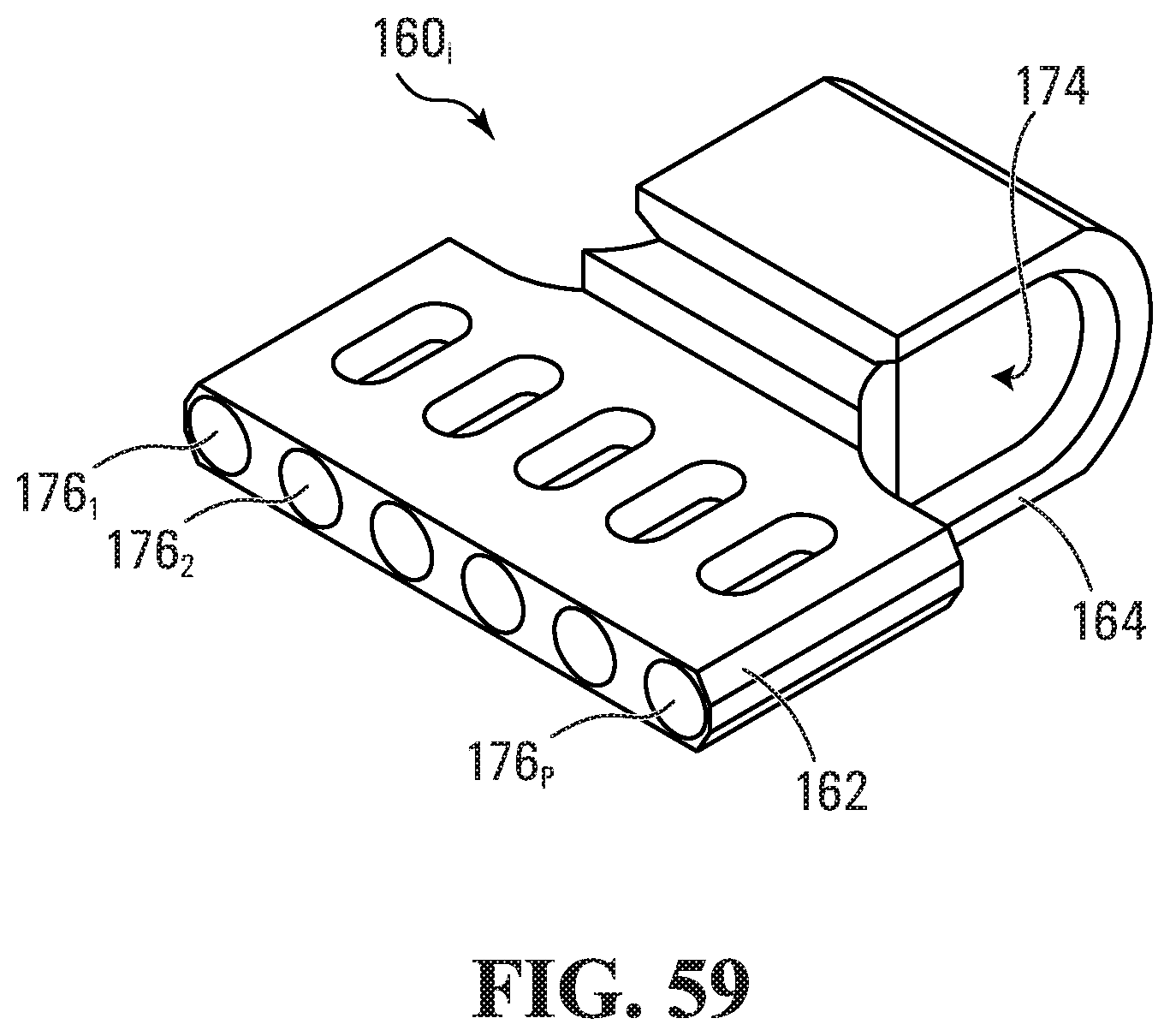
D00050

D00051

D00052

D00053

D00054

D00055

D00056

D00057

D00058

D00059

D00060

D00061

D00062

D00063

D00064

D00065

D00066
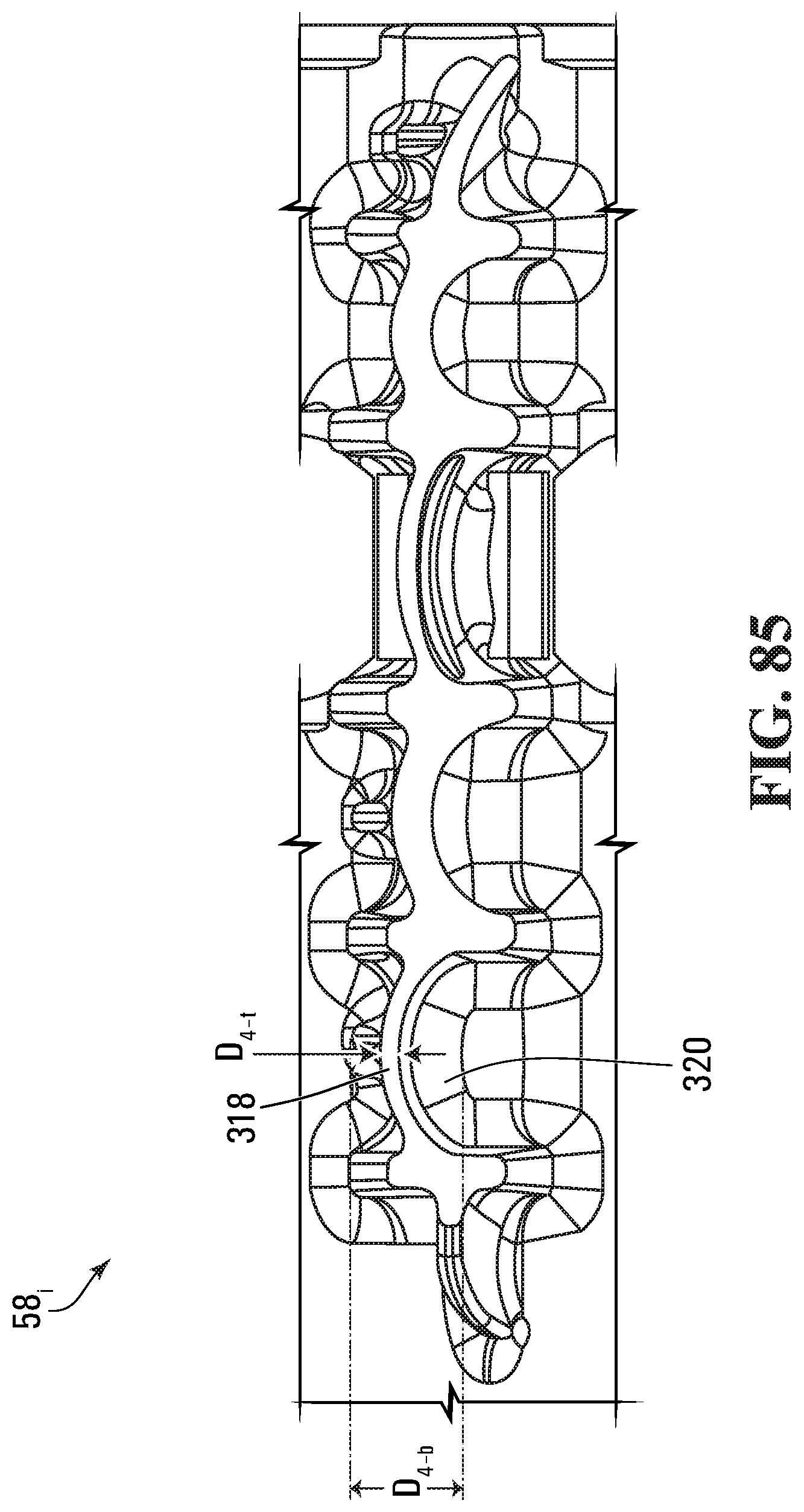
D00067

D00068

D00069

D00070



XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.