Automated Item-level Order Fulfillment
Khodl; Michael S. ; et al.
U.S. patent application number 16/526004 was filed with the patent office on 2020-02-06 for automated item-level order fulfillment. The applicant listed for this patent is Dematic Corp.. Invention is credited to Michael S. Khodl, Philip J. Puite.
| Application Number | 20200039745 16/526004 |
| Document ID | / |
| Family ID | 69227372 |
| Filed Date | 2020-02-06 |

| United States Patent Application | 20200039745 |
| Kind Code | A1 |
| Khodl; Michael S. ; et al. | February 6, 2020 |
AUTOMATED ITEM-LEVEL ORDER FULFILLMENT
Abstract
A method of order fulfillment, and system for carrying out the method, includes presenting individual items for multiple orders to an automated put wall and segregating the individual items for each order at a location on the put wall that is assigned to that order. Individual items for an order are removed together from the automated put wall and transported together to a packing function. Preferably individual items are stored as inventory items in an automated storage and retrieval system and retrieved from the automated storage and retrieval system in response to an order for those inventory items. The retrieved inventory items are sorted into order batches and automatically inducted to the automated put wall.
| Inventors: | Khodl; Michael S.; (Ada, MI) ; Puite; Philip J.; (Grand Rapids, MI) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Family ID: | 69227372 | ||||||||||
| Appl. No.: | 16/526004 | ||||||||||
| Filed: | July 30, 2019 |
Related U.S. Patent Documents
| Application Number | Filing Date | Patent Number | ||
|---|---|---|---|---|
| 62712684 | Jul 31, 2018 | |||
| Current U.S. Class: | 1/1 |
| Current CPC Class: | G06Q 20/202 20130101; G06Q 30/0635 20130101; B65G 1/0492 20130101; G07F 17/12 20130101; B65G 1/1373 20130101; B65G 1/1378 20130101; G07F 9/002 20200501; G07G 1/0036 20130101; G06Q 10/087 20130101 |
| International Class: | B65G 1/137 20060101 B65G001/137 |
Claims
1. A method of order fulfillment, said method comprising: presenting individual items for multiple orders to an automated put wall and segregating the individual items for each order at a location on the put wall that is assigned to that order; and removing the individual items for an order together from the automated put wall and transporting those items together to a packing function wherein the removing the individual items for an order together comprises withdrawing the items from at least one bin of the automated put wall with a robotic pick or put system.
2. The method of order fulfillment as claimed in claim 1, wherein the packing function comprises an automatic packing machine.
3. The method of order fulfillment as claimed in claim 1, wherein the individual items are presented from a receptacle of individual items for multiple orders.
4. The method of order fulfillment as claimed in claim 3, wherein the individual items are picked from the receptacle by a robotic cell.
5. The method of order fulfillment as claimed in 1, wherein the segregating the individual items for each order at a location on the put wall that is assigned to that order comprises putting the items to one bin of the automated put wall at the location on the put wall that is assigned to that order with a robotic pick or put system.
6. The method of order fulfillment as claimed in claim 5, wherein said robotic pick or put system comprises a robotic extractor or a cable operated platform.
7. The method of order fulfillment as claimed in claim 5, wherein the automated put wall delivers individual items to selected bins in two order racks, one on either side of a center aisle and including at least two of said robotic pick or put system, each robotic pick or put system withdrawing the items from order bins of ones of said order racks.
8. The method of order fulfillment as claimed in claim 1, wherein said two-dimensional robotic pick or put system comprises a robotic extractor or a cable operated platform.
9. The method of order fulfillment as claimed in claim 1, wherein said two-dimensional robotic pick or put system retrieves an order from a location on the automated put wall and forwards the order to the packing function.
10. A method of order fulfillment, said method comprising: presenting individual items for multiple orders to an automated put wall; segregating the individual items for each order at a location on the put wall that is assigned to that order by putting the individual items to one bin of the automated put wall at a location on the put wall that is assigned to that order with a robotic pick or put system; and removing the individual items for an order together from the automated put wall with a robotic pick or put system; transferring those items for an order to a conveyor; and transporting those items together with the conveyor to a packing function; wherein said segregating the individual items is performed by a first robotic pick or put system and said removing the individual items is performed by a second robotic pick or put system.
11. The method of order fulfillment as claimed in claim 10, wherein said segregating the individual items and removing the individual items are performed by the same robotic pick or put system.
12. The method of order fulfillment as claimed in claim 10, wherein each of said first and second robotic pick or put systems comprises a robotic extractor or cable operated platform.
13. A system for item-level order fulfillment, said system comprising: an automated put wall having a plurality of order locations in spaced arrangement on said put wall, each of said plurality or order locations assigned to an order; a robotic pick or put system configured to segregate individual items from an induct and put each of the individual items to one of said plurality of order locations corresponding to an order for that item; said robotic pick or put system configured to retrieve individual items of an order together from one of said plurality of order locations and to transfer the items of the order together to a packing function.
14. The system for item-level order fulfillment of claim 13, further comprising a conveyor to transfer the items of an order to the packing function.
15. The system for item-level order fulfillment of claim 13, wherein said robotic pick or put system further comprises a cable operated platform.
16. The system for item-level order fulfillment of claim 13, wherein the packing function further comprises an automatic packing machine.
17. The method of order fulfillment as claimed in claim 13, wherein the individual items are presented from a receptacle of individual items for multiple orders.
18. The method of order fulfillment as claimed in 13, further comprising a bin located at each of said plurality of order location on said automated put wall, said bin configured to receive the individual items that correspond to that order.
19. A system for item-level order fulfillment, said system comprising: an automated put wall having a plurality of order locations in spaced arrangement on said put wall, each of said plurality or order locations assigned to an order; a first robotic pick or put system configured to segregate individual items from an induct and put each of the individual items to one of said plurality of order locations corresponding to an order for that item; and a second robotic pick or put system configured to retrieve individual items of an order together from one of said plurality of order locations and to transfer the items of the order together to a packing function.
20. The system for item-level order fulfillment of claim 19, wherein each of said first and second robotic pick or put systems comprises a cable operated platform.
Description
CROSS REFERENCE TO RELATED APPLICATION
[0001] The present application claims priority of U.S. provisional application Ser. No. 62/712,684 filed Jul. 31, 2018, which is hereby incorporated herein by reference in its entirety.
FIELD OF THE INVENTION
[0002] The present invention is directed to a method of item-level order fulfillment and, in particular to a method that is substantially fully automated. The invention also includes systems for carrying out the method.
BACKGROUND OF THE INVENTION
[0003] Order fulfillment of orders placed over the Internet must take place within a relatively short period of time in order to be commercially competitive. The same could be said for orders received by phone, facsimile, or by the mail based on catalog or television-based merchandising. Such order fulfillment is known as E-commerce and places demands on an order fulfillment system to meet such obligations. This is compounded by the fact that E-commerce usually involves a large number of small orders (each containing as few as one item in the order) that are selected from an inventory with a large number of potential items. Inefficiencies and conflicts arise in warehouses due to the size constraints associated with warehousing and transporting items for order fulfillment, such as the amount of equipment or personal required to carry out an order fulfillment process, the size of the equipment involved, the size of the items to be manipulated, and other factors. Additionally inefficiencies and conflicts arise in sequencing orders and compiling items for orders having multiple items.
SUMMARY OF THE INVENTION
[0004] The present invention provides a method of item-level order fulfillment utilizing an automated put wall and putting individual items for an order to a location on the put wall for that order, retrieving the items for that order once substantially all items for that order are present at the order location and transferring those items to a packing function. The putting of individual items to a location on the put wall may be provided by a put or pick system, such as a cable operated platform or a robotic extractor. A picker, such as a put or pick system or a human picker, retrieves items for an order from the automated put wall once substantially all of the items for that order are present at the location of that order on the put wall. The picker transfers the items for the order to a packing function.
[0005] According to one form of the present invention, a method of item-level order fulfillment includes presenting individual items for multiple orders to an automated put wall and segregating those individual items such that each individual item is put to a location of the automated put wall, such as a bin, corresponding to that items order. The method includes retrieving all or substantially all items of the order from the orders location on the put wall when all or substantially all items of the order are present at that location. The method include transferring the items of the order to a packing function.
[0006] In one aspect, a robotic pick or put system is provided with the automated put wall to segregate the individual items for the multiple orders to a location on the put wall. The robotic pick or put system is also configured to retrieve the items of an order to transfer them to the packing function. A conveyor may be provided to transfer the items of an order from the robotic pick and put system to the packing function.
[0007] In another aspect, two robotic pick or put systems are provided, a first robotic pick and put system is configured to segregate the individual items for the multiple orders to a location on the put wall. Both the first and a second robotic pick and put systems are configured to retrieve the items of an order together and transfer the order to a packing function. A conveyor or conveyors may be provided to transfer the items of an order from the robotic pick and put systems to the packing function.
[0008] In one aspect, the robotic pick or put system may be a cable operated platform of the type disclosed in United States Patent Application Publication No. 2015/0217975, the disclosure of which is hereby incorporated herein by reference. The platform may include a robot arm or the like, which may be mounted or connected to the platform, to reach into the automatic put wall to put or deposit an individual item into the put wall or to retrieve an item or items of an order from the put wall.
[0009] Therefore, the present invention provides a method or item-level order fulfillment for automatically putting individual items at a location on an automated put wall corresponding to an order, and retrieving the items of that order from the automated put wall and transferring them to a packing function. The method utilizes robotic put or pick systems to segregate the individual items to the location of the order it corresponds to on the put wall, and to retrieve the items of that order together to transfer them to the packing function. The robotic put or pick systems may include a cable operated platform to transfer the items either to or from the automated put wall. The method may include either a human picker or a robotic put or pick system to retrieves items of an order together to be transferred to the packing function, depending on the speed and volume of order fulfillment required.
[0010] These and other objects, advantages, purposes, and features of the present invention will become more apparent upon review of the following specification in conjunction with the drawings.
BRIEF DESCRIPTION OF THE DRAWINGS
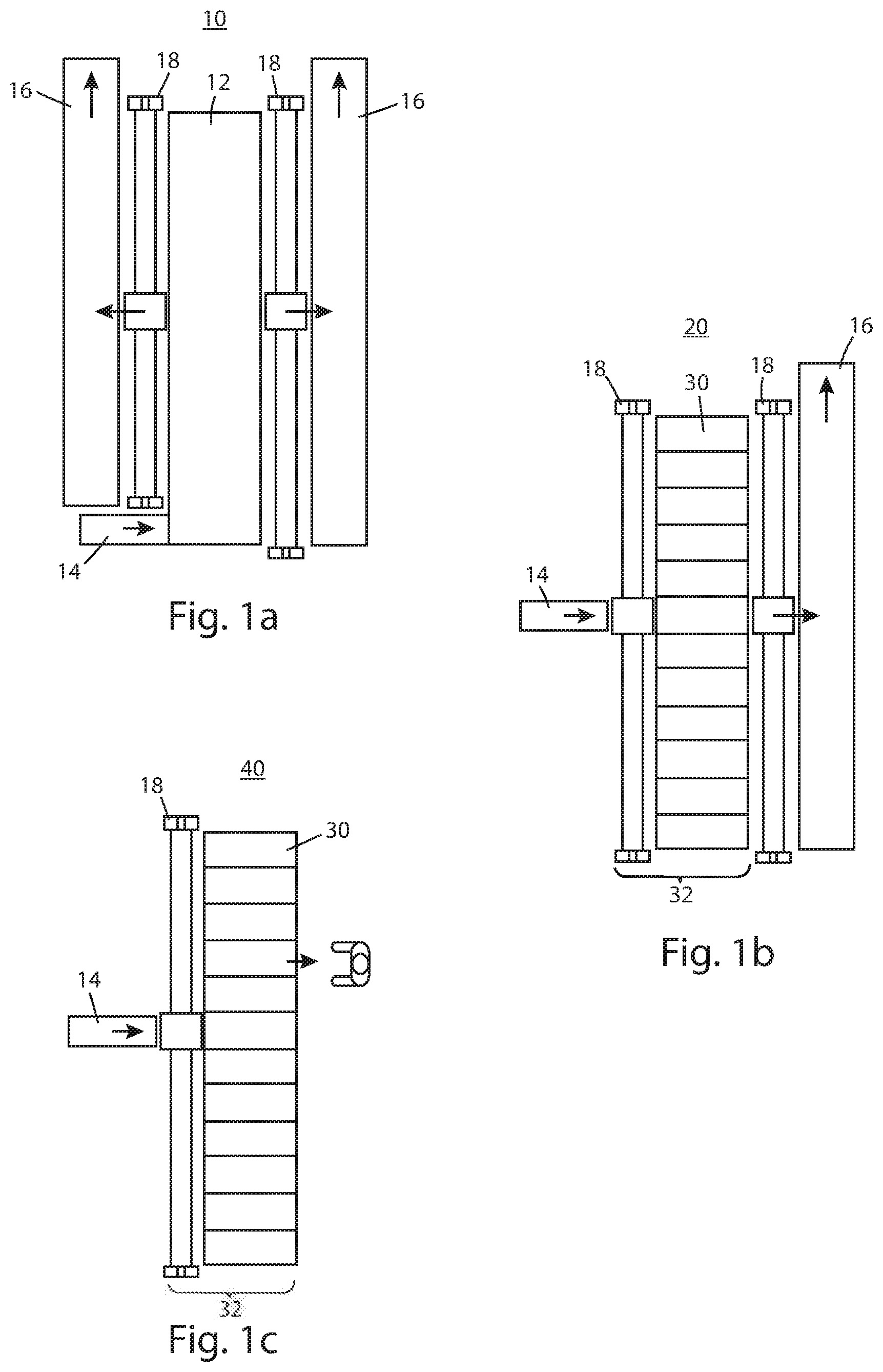
[0011] FIG. 1a is a schematic view of a method of item-level order fulfillment according to an embodiment of the invention;
[0012] FIG. 1b is the same view as FIG. 1a of an alternative embodiment; and
[0013] FIG. 1c is the same view as FIG. 1a of an alternative embodiment.
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENT
[0014] Referring now to the drawings and the illustrative embodiment depicted therein, a method of item-level order fulfillment 10 includes an automated put wall 12 and presenting individual items to the put wall 12 with an induct 14 of automated put wall 12 for multiple orders. Automated put wall 12 automatedly segregates the individual items in each order at a location on the put wall that is assigned to that order under the control of a warehouse management system (not shown) or the like. The individual items for an order are removed together from the automated put wall and transported, such as with a conveyor 16 together to a packing function (not shown). The packing function preferably is an automatic packing machine.
[0015] The individual items for an order are segregated by the induct 14 and put to one bin of automated put wall 12, such as with a robotic pick or put system 18. In the illustrated embodiment, robotic pick or put system 18 is a cable operated platform of the type disclosed in United States Patent Application Publication No. 2015/0217975, or of the type disclosed in commonly assigned Australian Patent Application No. 2018211306 filed Aug. 2, 2018, by Jad Abou-Chakra for CABLE DRIVEN STORAGE AND RETRIEVAL MACHINE FOR WAREHOUSES, Attorney Reference No. P109427.AU, the disclosures of which are hereby incorporated herein by reference. The cable operated platform 18 receives an individual item from the induct 14 and puts it to a location on the automated put wall 12. Alternatively, other type of robotic pick or put system could be used such as a robotic arm or the like.
[0016] In the illustrated embodiments, the induct 14 receives order items for multiple orders. The order items may arrive at the induct 14 in a receptacle or tote (not shown) and may contain a plurality of order items, such as a tote having more than one different items, i.e. a "dirty tote". The induct 14 segregates each individual item from the tote and transfers it to the pick or put system 18. The induct 14 continuously retrieves order items from the tote and transfers them to the pick or put system 18 until all items in the tote have been removed and the tote is empty. The induct 14 then transfers the empty tote out of the induct 14, such as to an automated warehouse for re-use.
[0017] The individual items for an order are removed together by being withdrawn from at least one bin of automated put wall 12 with a robotic pick or put system 18. Two two-dimensional robotic pick or put systems 18 are provided in the embodiment illustrated in FIG. 1a, the pick or put systems 18 deliver individual items to selected bins of the automated put wall 12 in two order racks, one on either side of a center aisle (not shown). The cable operated platform retrieves an individual item from a location on the automated put wall and forwards the order to the packing function via conveyor 16. Each pick or put system 18 of FIG. 1a withdrawing items from order bins of the pick or put systems of the respective order rack and transferring the items of orders to a respective conveyor 16 for transport to the packing function.
[0018] The cable operated platform may include a robot arm or the like (not shown), which may be mounted or connected to the platform, to reach into the automatic put wall 12 to put or deposit an item into the put wall 12 or to retrieve an item or items of an order from the put wall 12. After obtaining the item, the platform delivers the item to the picker or a specific location, such as the conveyor 16.
[0019] A method of item-level order fulfillment 20 is illustrated in FIG. 1b. In item-level order fulfillment method 20 an automated put wall 32 is provided by a manual put wall 30 of the type known in the art and a robotic pick or put system 18. Robotic pick or put system 18, which may be a cable operated platform, receives individual items from an induct 14, which sorts the items to a particular bin within manual put wall 30. Another robotic pick or put system 18 withdraws the items from one or more order bins that together make up an order and transfers the items of the order to a conveyor 16 for transport to the packing function.
[0020] A method of item-level order fulfillment 40 is illustrated in FIG. 1c. Item-level order fulfillment method 40 uses an automated put wall 32 made up of a manual put wall 30 and a two-dimensional robotic pick or put system 18 in order to sort individual items into orders in the same fashion as described with respect to method of item-level order fulfillment 20 but uses a human operator to manually unload the bins of completed orders and provide the orders to a packing function or perform the packing function at the same time. Method of item-level order fulfillment 40 is not as fast or efficient as method of item-level order fulfillment 10 or 20 but may find application where a lower rate is all that is required.
[0021] When an item is to be put to the put wall 12 or picked from the put wall 12, a signal is transmitted via a central processing unit (not shown) to the automated put wall 12 identifying the location of that item. The platform is then moved via the set of cables and a control system of the pick or put system 18 to the identified location whereby the item is then either transferred from the platform and put to the put wall 12 or picked from the put wall 12 and placed on the platform.
[0022] While the foregoing description describes several embodiments of the present invention, it will be understood by those skilled in the art that variations and modifications to these embodiments may be made without departing from the spirit and scope of the invention, as defined in the claims below. The present invention encompasses all combinations of various embodiments or aspects of the invention described herein. It is understood that any and all embodiments of the present invention may be taken in conjunction with any other embodiment to describe additional embodiments of the present invention. Furthermore, any elements of an embodiment may be combined with any and all other elements of any of the embodiments to describe additional embodiments.
* * * * *
D00000
D00001
XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.