Method And System For Monitoring A Point System Of A Railway Network, And Point System Of A Railway Network
ALESSI; Allegra ; et al.
U.S. patent application number 16/028743 was filed with the patent office on 2020-01-09 for method and system for monitoring a point system of a railway network, and point system of a railway network. This patent application is currently assigned to ALSTOM TRANSPORT TECHNOLOGIES. The applicant listed for this patent is ALSTOM TRANSPORT TECHNOLOGIES, UNIVERSITY OF CINCINNATI. Invention is credited to Allegra ALESSI, Hossein DAVARI ARDAKANI, Pierre DERSIN, Wenjing JIN, Piero LA-CASCIA, Benjamin LAMOUREUX, Jay LEE, Michele PUGNALONI, Zhe SHI.
| Application Number | 20200010101 16/028743 |
| Document ID | / |
| Family ID | 67180587 |
| Filed Date | 2020-01-09 |


| United States Patent Application | 20200010101 |
| Kind Code | A1 |
| ALESSI; Allegra ; et al. | January 9, 2020 |
METHOD AND SYSTEM FOR MONITORING A POINT SYSTEM OF A RAILWAY NETWORK, AND POINT SYSTEM OF A RAILWAY NETWORK
Abstract
Method for monitoring at least one point system of a railway network comprising the steps of placing several sensors in correspondence of said at least one point system; acquiring from said sensors current and voltage signals of a point machine during a maneuver; and segmenting the signals of the maneuver according to different predetermined phases of movement. Then extracting predetermined features from each segment; comparing the extracted features with a set of predetermined values which represent a "healthy" maneuver, thus obtaining a global indicator representative of the conditions of the maneuver at the point system; and comparing said global indicator with a failure threshold, and if it exceeds said failure threshold, detecting a failure in the point system.
| Inventors: | ALESSI; Allegra; (NOTTINGHAM, GB) ; LAMOUREUX; Benjamin; (PARIS, FR) ; DERSIN; Pierre; (LOUVECIENNES, FR) ; LEE; Jay; (MASON, OH) ; DAVARI ARDAKANI; Hossein; (CINCINNATI, OH) ; SHI; Zhe; (COLOMBUS, IN) ; JIN; Wenjing; (HEBEI, CN) ; LA-CASCIA; Piero; (BUDRIO, IT) ; PUGNALONI; Michele; (JIESI, IT) | ||||||||||
| Applicant: |
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Assignee: | ALSTOM TRANSPORT
TECHNOLOGIES Saint-Ouen OH UNIVERSITY OF CINCINNATI CINCINNATI |
||||||||||
| Family ID: | 67180587 | ||||||||||
| Appl. No.: | 16/028743 | ||||||||||
| Filed: | July 6, 2018 |
| Current U.S. Class: | 1/1 |
| Current CPC Class: | B61L 23/04 20130101; B61L 7/08 20130101; B61L 27/0088 20130101; B61L 25/06 20130101; B61L 5/107 20130101 |
| International Class: | B61L 25/06 20060101 B61L025/06; B61L 23/04 20060101 B61L023/04 |
Claims
1. Method for monitoring at least one point system of a railway network comprising the steps of: placing several sensors in correspondence of said at least one point system; acquiring from said sensors current and voltage signals of a point machine during a maneuver; segmenting the signals of the maneuver according to different predetermined phases of movement; extracting predetermined features from each segment; comparing the extracted features with a set of predetermined values which represent a "healthy" maneuver, thus obtaining a global indicator representative of the conditions of the maneuver at the point system; and comparing said global indicator with a failure threshold, and if it exceeds said failure threshold, detecting a failure in the point system.
2. The method according to claim 1, further comprising: determining library of vectors relative to degradation mechanisms, replicating multiple degradation patterns of the point system; concatenating the values of the extracted features into a vector, said values representing the effect of a degradation of the point system; and comparing the vector with the library of vectors to identify the degradation mechanism.
3. The method according to claim 1, wherein the global indicator corresponds to an aggregation of values obtaining through the comparison of the extracted features with the set of predetermined values.
4. The method according to claim 1, further comprising: evaluating the global indicator to determine different degradation patterns with different levels, comprising but not limited to misalignment, obstacle, excessive force.
5. The method according to claim 1, further comprising the step of concatenating the values of the extracted features into a vector, said values representing the effect of a degradation of the point system.
6. The method according to claim 1, wherein the step of comparing comprises the steps of: normalizing the extracted features with respect to a set of reference features, thus obtaining corresponding indicator values; and combining said indicators to obtain the global indicator.
7. The method of claim 6, wherein normalizing the extracted features comprises: subtracting an original value taken from the signal in the segment from a predetermined mean value and dividing the result by a predetermined standard deviation value.
8. The method of claim 6, wherein combining said indicators comprises calculating the Mahalanobis distance of said indicators.
9. The method of claim 6, wherein combining said indicators comprises calculating a distance such as a Mahalanobis distance between subgroup of said indicators or applying a principal component analysis algorithm to subgroup of said indicators or calculating minimum quantization error from subgroup of said indicators.
10. The method according to claim 1, wherein the extracted features include the peak value of the signal, differentials of the signal, average of the signal, mean of the signal, maximum of the signal, the slope of the signal curve.
11. The method according to claim 1, wherein the predetermined values which represent a "healthy" maneuver are values determined through a machine learning process based on data relative to previous maneuvers, from a point system of nominal status.
12. The method according to claim 4, wherein the step of evaluating the global indicator comprising different levels of misalignment, obstacles, excessive force.
13. A monitoring system for monitoring at least one point system of a railway network comprising a point system of a railway network, a plurality of sensors placed in correspondence with said point system and an elaboration unit connected to said sensors and to the point system and arranged to carry out the method according to claim 1.
14. A point system of a railway network including a plurality of sensors arranged to be connected to an elaboration unit arranged to carry out the method according to claim 1.
Description
FIELD OF THE INVENTION
[0001] The present invention relates to a method and a system for monitoring a point system of a railway network, and to a point system of a railway network
BACKGROUND
[0002] A point system comprises a point machine, some moving appliances, two stock rails and two switch rails.
[0003] Point machines, also known as switch machines, are used to operate track switches, also known as turnouts, that enable routing of trains from one track to another and that comprise stock rails and switch rails. These point systems tend to be relatively heavy mechanical or hydraulic machines moving heavy steel appliances in sometimes extreme conditions. Failure of a point system can cause total blockage of a railway, since a safe route over a switch may not be established for a train due to the failure.
[0004] These major events can cause delays to freight and passenger trains, failure to meet schedules that often result in financial penalties, additional costs of train crews and locomotive operations, blockage of highway crossings and reputation loss to customers.
[0005] Point systems are lubricated, adjusted, and otherwise maintained on a periodic basis, but given the often remote location of these systems, the maintainers may be unaware of the impact on the track layout of the number of operations, weather, and changing ground surface conditions, or of the maintenance operation itself.
[0006] It is known to monitor the conditions of a point system, as shown for example in document US 2015/0158511, wherein a waveform of the operating characteristics is examined to identify or predict a problem with the operations of the point system.
[0007] One problem of the method disclosed in the above indicated document is that turnouts are generally inspected on a scheduled basis, therefore, failures which severely affect the railway traffic may happen in the time period between two inspections without possibility to foresee them.
[0008] Also, the method needs a monitor and a processor device so that the operator must be physically on the operating site and manually trigger the different tasks to perform the point system monitoring.
[0009] Another problem of the method disclosed in the above indicated document is that the healthy reference is learnt from a single movement (the first movement), therefore, the natural variations of the waveforms are not included in this reference and there is a significant risk to confuse environmental change with real degradations, and thus to make false detection and diagnosis.
SUMMARY
[0010] The technical problem to solve is therefore how to perform a remote and automated detection of anomalies in a point system, a remote and automated identification of a degradation in the conditions of the point system and a remote and automated prognosis of the remaining time before failure of a turnout.
[0011] An object of the present invention is therefore to provide a method for monitoring a point system of a railway network which allows to perform a remote and automated analysis of the conditions of the point system in order to foresee anomalies and plan maintenance interventions, which allows to make diagnosis of degradation conditions of the point system itself and to identify the time remaining before a next failure of the point system, thus overcoming the limitations of the prior art systems.
[0012] These and other objects are achieved by a method for monitoring a point system of a railway network having the characteristics defined in claim 1.
[0013] Further subjects of the present invention are a system for monitoring a point system of a railway network, and a point system of a railway network as claimed.
[0014] Particular embodiments of the invention are the subject of the dependent claims, whose content is to be understood as an integral or integrating part of the present description.
[0015] Thanks to the fact that when a degradation appears in a point system its kinematic behavior is different and the energy consumption profile is affected, the method of the present invention performs an anomaly detection, a degradation diagnosis and a prognosis of a remaining useful life of the point system itself by monitoring current and voltage signals supplied to the point system during its maneuvers, and by following their evolution in time.
BRIEF DESCRIPTION OF THE DRAWINGS
[0016] Further characteristics and advantages of the present invention will become apparent from the following description, provided merely by way of a non-limiting example, with reference to the enclosed drawings, in which:
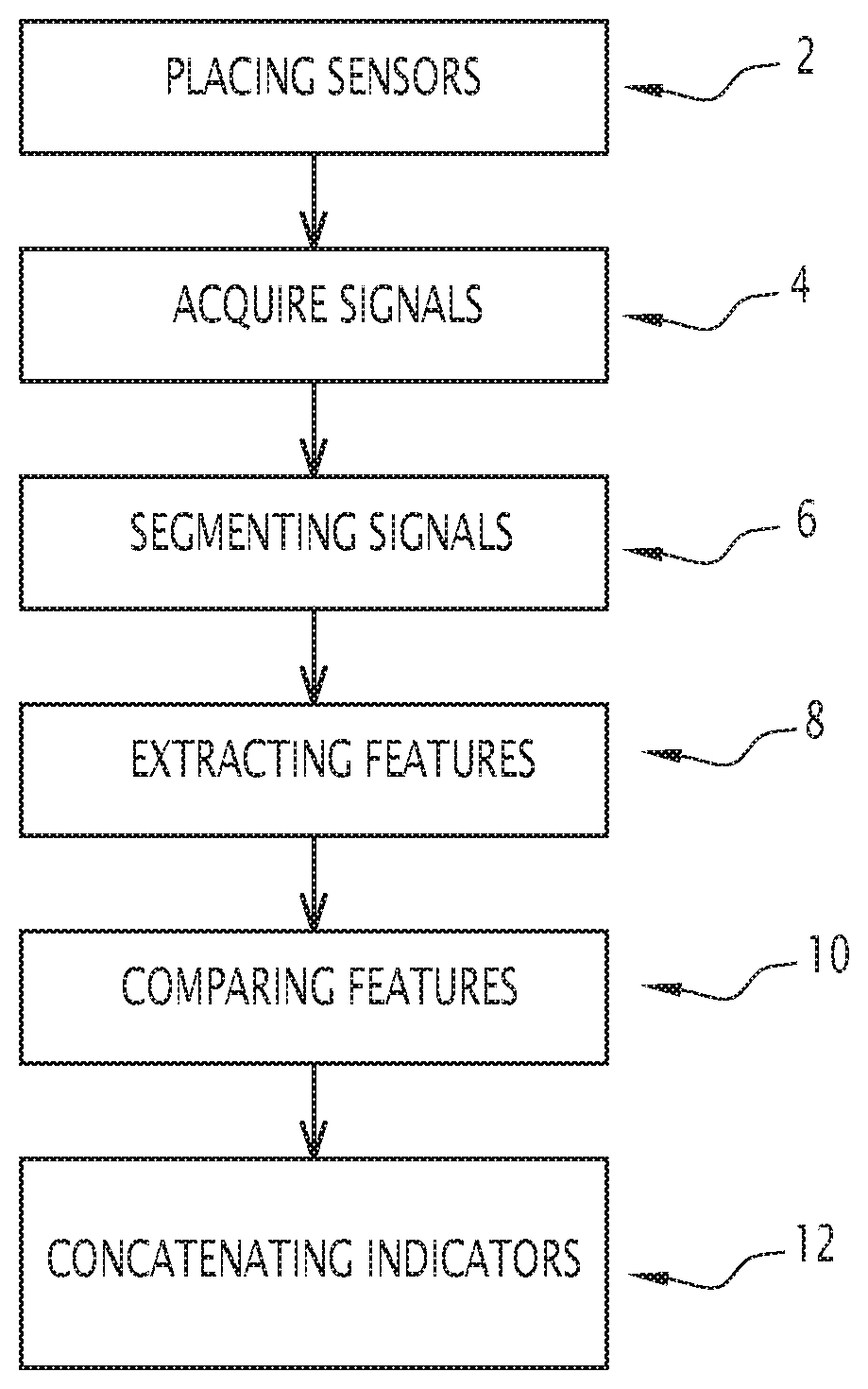
[0017] FIG. 1 shows a schematic block diagram of the steps performed by a method according to the present invention;
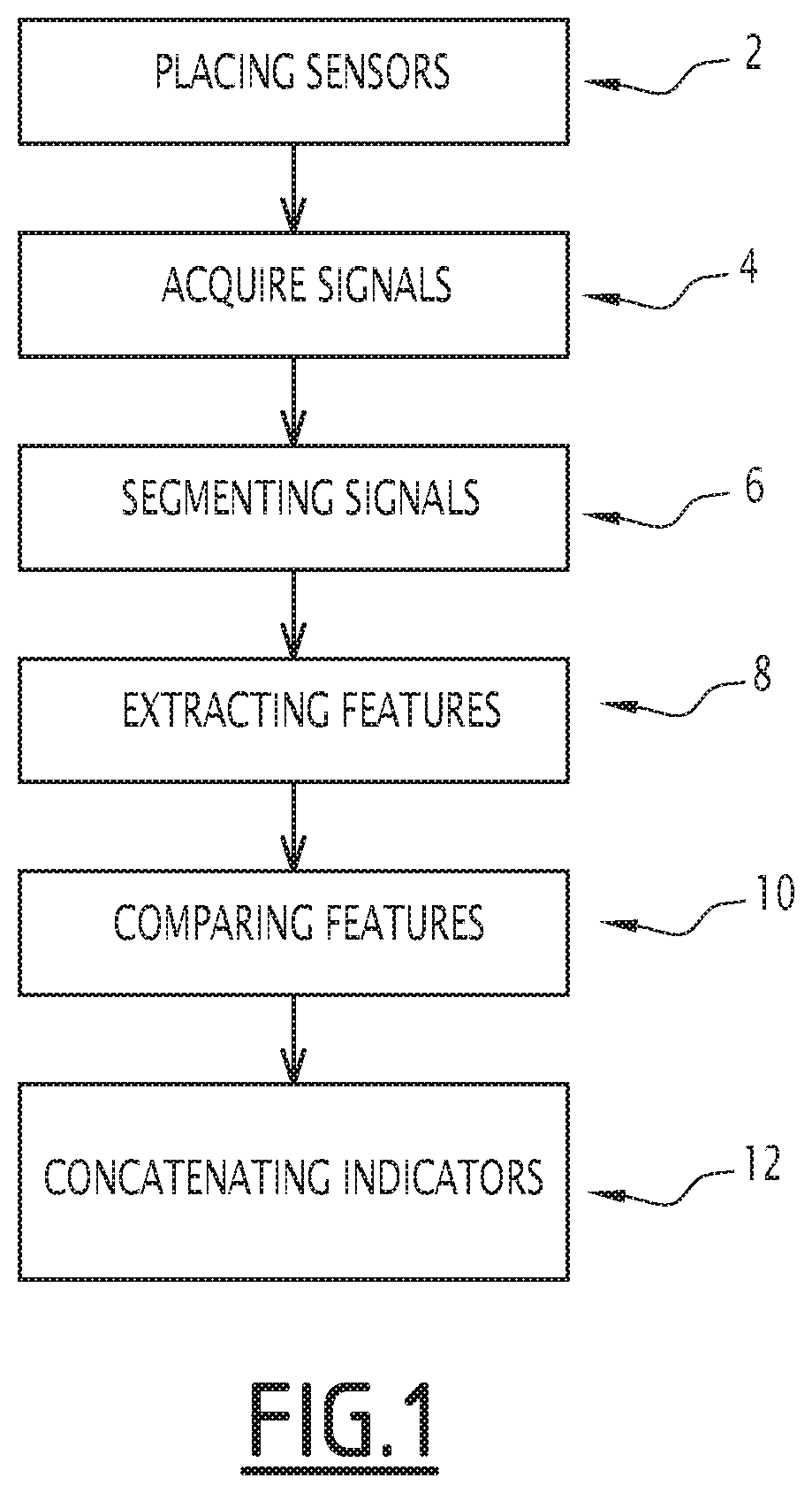
[0018] FIG. 2 is an example of a signal segmented according to different phases of movement, for a single pushing point electro-mechanical point machine with open-loop control;
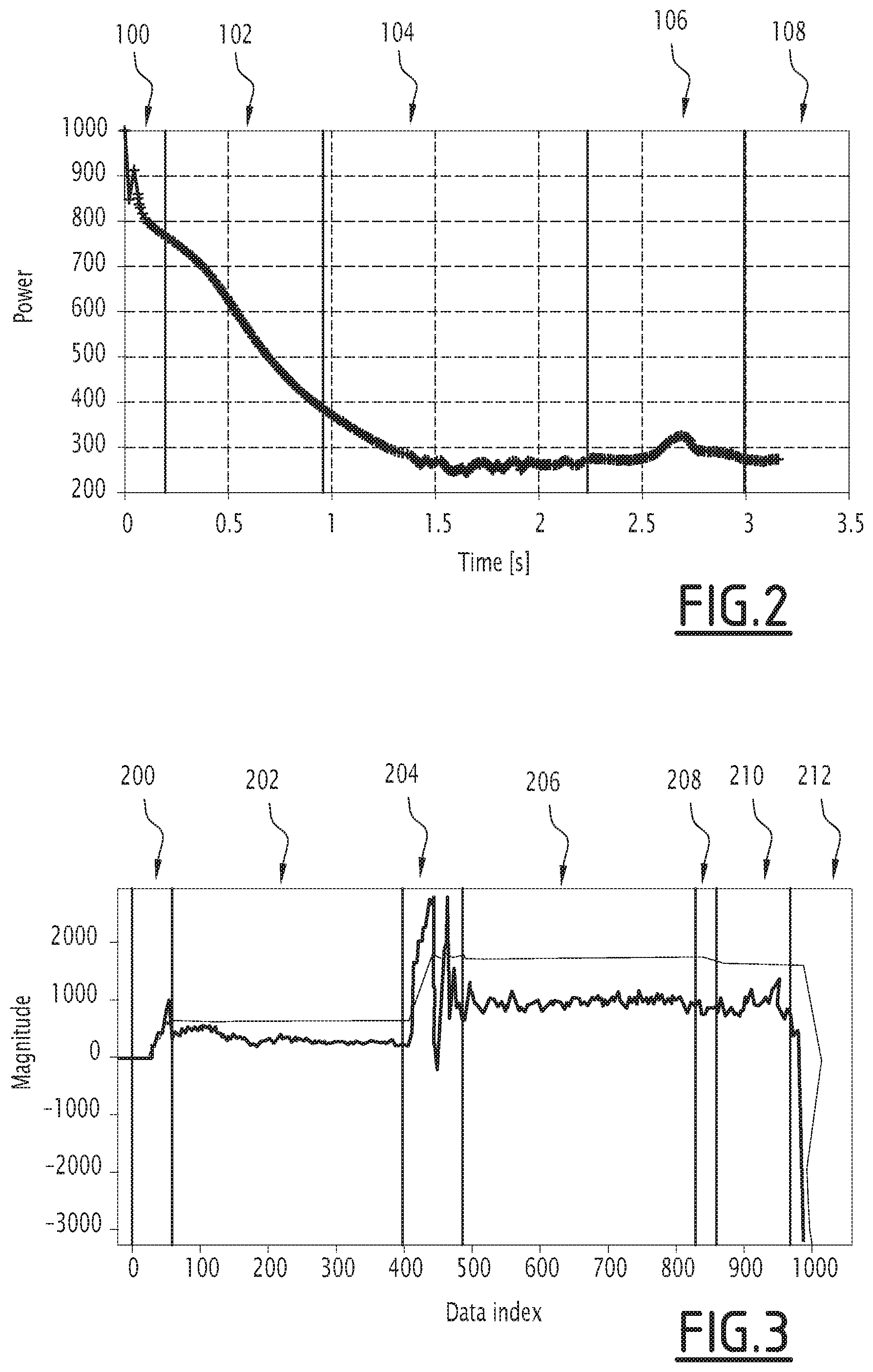
[0019] FIG. 3 is an example of a signal segmented according to different phases of movement, for a single pushing point electro-mechanical point machine with closed-loop control;
[0020] FIG. 4 shows an interface for expressing a reference index calculated according to a method of the present invention; and
[0021] FIG. 5 shows an alternative embodiment of the interface of FIG. 4.
DETAILED DESCRIPTION
[0022] The method according to the present invention is based on the acquisition of current and voltage signals supplied to a point machine.
[0023] The signals are firstly segmented according to different phases of a maneuver, then they are compressed into a set of features that are physically relevant for assessing the condition of the point system.
[0024] The analysis is performed for each point system of a railway network and for each direction (Normal/Reverse) independently, this being precise and robust to variability.
[0025] The core of the method of the present invention relies on the processing done on the signals and on the way the degradations are recognized.
[0026] The method of the present invention aims at assessing the conditions of a railway turnout remotely, automatically and in real-time, in order to provide the maintainers with useful and precise information regarding the actual operation of the corresponding point system. The method allows therefore the maintenance to properly plan actions on the various point systems, in particular only when necessary, to avoid service affecting failures.
[0027] FIG. 1 shows a block diagram of the steps of a method according to the present invention.
[0028] In a first step 2, several sensors per se known are placed in correspondence with respective point systems. For example, the sensors are placed in a manner known per se in an interlocking equipment of an interlocking system, for example in the single pushing point electro-mechanical point machine with open-loop control configuration, or in the point system itself, for example in the single pushing point electro-mechanical point machine with closed-loop control configuration.
[0029] In a next step 4, for each point system, the sensors acquire current and voltage signals of a turnout during a maneuver. These signals are transferred, along with any relevant information disclosed here below, to a processing unit placed in a remote cabin along the railway track which segments, in a step 6, the signals of the maneuver according to different predetermined phases of movement, preferably unlocking of a locking system of the point machine (or unlocking of an external locking system associated with the point system), movement of the blades of the point system, closing of the locking system, locking of the locking system.
[0030] Examples of relevant information transferred to the processing unit include:
[0031] current supplied at the point system and used during the maneuver;
[0032] voltage applied to the point system during the maneuver;
[0033] direction of the maneuver;
[0034] time taken to complete the maneuver;
[0035] detection of the position of the point system at the end of the maneuver (confirmation that the maneuver has been completed successfully);
[0036] point system actually doing the maneuver under analysis.
[0037] FIG. 2 and FIG. 3 show two examples of a current signal segmented according to the different phases of movement, respectively for a single pushing point electro-mechanical point machine with open-loop control and for a single pushing point electro-mechanical point machine with closed-loop control.
[0038] All the steps of the method of the present invention are performed simultaneously on both the current and the voltage signal, and the features extracted from these signals herein below disclosed are combined for the final analysis, as below detailed.
[0039] With regard to the segmentation step 6, it is worth pointing out that the stroke of a slider has always a predetermined width, for example 214 mm, hence whatever are the signal shape and the time span for a maneuver, the slider will cover a stroke of such width.
[0040] Starting from this stroke and considering that the internal components of the point system do not move all at the same time, the analysis has aimed to identify a correlation between parts of the slider stroke and movement of internal components. At the end of the analysis, the expected result was a stroke division into segments associated to the movements of specific subset of components, as herein below disclosed.
[0041] In FIG. 2, a first zone 100 corresponds to the moment when a locking system of a point machine is unlocked, before a maneuver starts. A second zone 102 corresponds to the movement of a first switch rail. A third zone 104 corresponds to the movement of both switch rails. A fourth zone 106 corresponds to the closing of the first switch in a final position while the second switch rail continues to move, and a fifth zone 108 corresponds to the locking of the point system.
[0042] In FIG. 3, in a first zone 200 a maneuver starts at a predetermined point system. In a second zone 202 there is a movement of internal components of a locking system of the point system to unlock the locking system itself. In a further zone 204 the locking system is unblocked and in a further zone 206 there is the rails movement. In a subsequent zone 208 the locking system is blocked, in a further zone 210 the locking system is locked and in a final zone 212 the maneuver is terminated.
[0043] The segmentation is advantageously realized based on a known stroke of a slider of the point machine. The slider stroke is subdivided in segments based on identified movements of specific subset of the point system.
[0044] Returning now to FIG. 1, at step 8, the processing unit extracts, for each segment disclosed with reference to FIGS. 2 and 3, and for each current and voltage signal, relevant features such as the peak value of the signal, differentials, average, etc. The set of extracted values are different for different point systems. For example, for a first type point system known per se, the average and the standard deviation of the first three segments are extracted, whereas for a second type point system known per se, the duration and the slope of the first segment and the kurtosis on the second segment are extracted. The selection of features is based on the physical behavior of the point system itself, therefore, if the behavior is different between the first and the second type point system, the features also vary.
[0045] The extracted features, which represent statistical and physical characteristics of the point system, belong to different groups:
[0046] context features: necessary to contextualize the maneuver, for example if a maneuver is complete, if it is a maintenance maneuver, if the machine is being operated at a particular temperature, etc.;
[0047] usage features: to contextualize the frequency of use of the point system;
[0048] turnout "health" features: characteristics necessary to contextualize the global turnout behavior;
[0049] point machine "health" features:
[0050] a) global: characteristics of the signal that relate to the point machine;
[0051] b) segments: characteristics of the signal that relate to each segment (or phase of movement) of the point machine;
[0052] In the following of the description, reference will be made in general only to "extracted features".
[0053] Through this segmentation step 6, the maneuver is represented by a vector of features which highlight the physical behavior of the point system. The vector comprises the features of both the current and voltage signal. This reduces significantly the data to be treated, and subsequently the volume of data to be communicated and processed at the following steps.
[0054] The feature extraction represents the final step in a pre-processing phase.
[0055] Advantageously, therefore, a vector representing the maneuver is determined, the vector comprising said extracted features, e.g. peak values, differential values, average values, mean values measured during each segment of the maneuver.
[0056] Advantageously the vector is compared with a library of vectors relative to degradation mechanisms, and the degradation mechanism is determined in function of the comparison.
[0057] At step 10 the processing unit compares the set of extracted features with a set of predetermined reference features or values which represent a "healthy" maneuver, thus producing a "health" index or indicator as disclosed herein below.
[0058] The "health" index is a numerical value which indicates the level of degradation of the target equipment with respect to a failure threshold and varies monotonically with the condition of the equipment. The "health" index is an aggregation or selection of health indicators as herebelow disclosed, and is used to define an overall global "health" of the point system. The "health" index is used in prognostics for an estimation of an expected evolution in time and, thus, of an estimated time before an expected failure. The "health" index is calculated based on a comparison between the vector above disclosed and several references values. In particular, the health index is compared with a threshold value representative of the health index of N previous maneuvers, in order to determine whether the current maneuver is healthy or not.
[0059] In the present description the expressions "health" or "healthy" refer to a maneuver which takes place at a point system which is in good operating conditions, which do not need maintenance, etc.
[0060] To perform such comparison, for each segment, as indicated above, different features such as the mean of the signal, the maximum of the signal, the derivative of the signal, the slope of the curve, are extracted in a manner known per se. These values are then normalized with respect to a set of predetermined reference "healthy" values of features.
[0061] The predetermined reference "healthy" values are values automatically learnt with a machine learning process from data relative to previous maneuvers. In particular, in order to detect a deviation from what is expected to be a healthy behavior, and therefore to detect an anomaly, a priori predetermined maneuvers, in particular forty maneuvers, are identified as "healthy". A corresponding area in a feature-space, which corresponds to a healthy region, can be therefore determined. In other words, in an n-dimensional space, where n is the number of features taken into consideration, an area can be defined as "healthy". These forty maneuvers, twenty per each direction of movement along the railway track, are referred to as "baseline", as they define a base value against which current new values have to be compared.
[0062] The degree of health or abnormality of a new maneuver is therefore represented by the distance between the "healthy" area in the feature-space and the new maneuver itself. The "health" index is defined as the distance between an healthy maneuver and a current maneuver in the feature-space.
[0063] In the following of the description, the term "predetermined" will refer to a value(s) learnt each time thanks to a machine learning process known per se, based on the concepts above disclosed.
[0064] Preferably, a Gaussian normalization is done as here disclosed: a predetermined mean is subtracted from the original value of each feature taken from the signal and divided by a predetermined standard deviation. In particular, the predetermined mean is a value calculated as the mean of the set of reference "healthy" values (the baseline above indicated), and the predetermined deviation standard is one value of the set of reference "healthy" values (the baseline above disclosed).
[0065] The result of such normalization is called "indicator". The indicators of all the features, relating to both the current signal and the voltage signal, are then combined, to give a single value called global "health" indicator. In particular, the global "health" indicator is the Mahalanobis distance calculated from the set of indicators. A failure threshold and a set of AND rules are then applied in a manner known per se to the value of the global "health" indicator to assess the state of the point system: healthy, abnormal or degraded. In particular, if the global "health" indicator exceeds the failure threshold, this means that the point system is about to have a failure.
[0066] Examples of AND rules include the following: if the time between the current maneuver and the previous one is less than a predetermined time, for example one minute, and the energy of the maneuver is above a threshold, then some maintenance is occurring
[0067] Several shape parameters of the acquired signals/the extracted features are therefore normalized with respect to learnt baselines and then combined (the Mahalanobis distance) to calculate the global "health" indicator which represents how similar the actual shape of the signals is to the shape of a set of "healthy" reference curves.
[0068] At this point, at step 12, the values of the indicators are concatenated into a vector called signature, said values representing the effect of a given degradation on the point system, which are an immediate, direct and easy to understand interpretation of the characteristics of the turnout.
[0069] The "health" state is expressed in a user-friendly web interface which allows an immediate comprehension of the state of the point system together with a list of possible failure mechanisms. The interface helps the maintainers to understand the type of maintenance intervention necessary to restore the asset of the point system as well as the urgency of the action.
[0070] FIG. 4 shows an example of such interface. This interface offers an overview of a railway network being monitored, and is divided into three main areas, namely a global vision area 300, a field layout area 302 and an overall summary area 304.
[0071] In the global vision area 300 there are two types of information for all the point systems being monitored: reference information and availability information. This information is summarized by two rings, respectively an internal and an external ring, wherein each point system is a square in these rings.
[0072] The "health" of each point system is indicated by a color. The availability of the machines is indicated by various hues in the internal ring, where a dark zone indicates that there is a maintenance action being performed on the point system, a light zone indicates that the point system is offline because the sensors are not sending data and a medium colored zone indicates that the switch point system is online. It is possible to select any machine from the ring to see the corresponding reference index.
[0073] In the field layout area 302, the monitored point systems are presented in their real on-field configuration, colored by their "health" state to immediately identify which machines are in need of maintenance. If the machines are offline or under maintenance, this is reported as shown in FIG. 5.
[0074] In FIG. 5 it is possible to see that turnout 2, indicated by reference 500, is undergoing maintenance. This can be seen from the dark frame in field layout area 302 and from the "zebra" section 502 in the global vision area 300.
[0075] Returning now to FIG. 4, in the overall summary area 304 it is possible to see an overview of the characteristics of the railway network being monitored. A first zone 304a indicates the availability of the monitored machines, in other words the percentage of machines which are online over the total. A second zone 304b is the global health of the machines, in other words the percentage of machines which are "healthy" over the total. A third zone 304c indicates the total number of maneuvers registered since the installation date. A fourth zone 304d is the date and time of the last maneuver monitored, to give an indication of how updated the page is.
[0076] The method of the present invention has been able to detect faults which the maintainers had not noticed, as well as power supply interruptions, obstacles and rail deformation. Therefore, the detection capabilities of the method of the present invention have proven to be more effective than visual inspections.
[0077] The present invention further comprises a monitoring system for monitoring a point system of a railway network which includes:
[0078] a point system of a railway network as above disclosed;
[0079] a plurality of sensors per se known placed in correspondence with said point system; and
[0080] an elaboration unit connected to said sensors and to the point system and arranged to carry out the method of the present invention.
[0081] Further subject of the present invention is a point system of a railway network including a plurality of sensors arranged to be connected to an elaboration unit arranged to carry out the method of the present invention.
[0082] Clearly, the principle of the invention remaining the same, the embodiments and the details of production can be varied considerably from what has been described and illustrated purely by way of non-limiting example, without departing from the scope of protection of the present invention as defined by the attached claims.
* * * * *
D00000
D00001
D00002
D00003
D00004
XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.