Joint driving member for robot
Kawaguchi , et al.
U.S. patent number D847,239 [Application Number D/633,214] was granted by the patent office on 2019-04-30 for joint driving member for robot. This patent grant is currently assigned to Mitsubishi Electric Corporation. The grantee listed for this patent is MITSUBISHI ELECTRIC CORPORATION. Invention is credited to Tomoya Hattori, Koji Hirose, Noboru Kawaguchi, Hidetaka Yamauchi.







| United States Patent | D847,239 |
| Kawaguchi , et al. | April 30, 2019 |
Joint driving member for robot
Claims
CLAIM The ornamental design for a joint driving member for robot, as shown and described.
| Inventors: | Kawaguchi; Noboru (Tokyo, JP), Yamauchi; Hidetaka (Tokyo, JP), Hattori; Tomoya (Tokyo, JP), Hirose; Koji (Tokyo, JP) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Applicant: |
|
||||||||||
| Assignee: | Mitsubishi Electric Corporation
(Tokyo, JP) |
||||||||||
| Appl. No.: | D/633,214 | ||||||||||
| Filed: | January 12, 2018 |
Foreign Application Priority Data
| Jul 18, 2017 [JP] | 2017-015406 | |||
| Current U.S. Class: | D15/199 |
| Current International Class: | 1599 |
| Field of Search: | ;D15/199 ;D21/369,578-583,621,622 |
References Cited [Referenced By]
U.S. Patent Documents
| 5002242 | March 1991 | Nagai |
| 5099707 | March 1992 | Tori |
| 5107716 | April 1992 | Torii |
| 5119753 | June 1992 | Milad |
| 5342254 | August 1994 | Sula |
| 5593293 | January 1997 | Machino |
| 5740699 | April 1998 | Ballantyne |
| 5893296 | April 1999 | Rosheim |
| 6151981 | November 2000 | Costa |
| 6220813 | April 2001 | Launiere |
| 6240799 | June 2001 | Yau |
| 7013750 | March 2006 | Kazami |
| 9512912 | December 2016 | Edsinger |
| 9568074 | February 2017 | Gosselin |
| 9849925 | December 2017 | Outa |
| 10040206 | January 2018 | Jeong et al. |
| D810801 | February 2018 | Hsu et al. |
| 10144464 | December 2018 | Buerger et al. |
| 2002/0078778 | June 2002 | Grover |
| 2005/0275367 | December 2005 | Buehler |
| 2007/0062321 | March 2007 | Chablat |
| 2009/0308188 | December 2009 | Yang |
| 2010/0122602 | May 2010 | Marcroft |
| 2010/0162846 | July 2010 | Lee |
| 2010/0170357 | July 2010 | Kim |
| 2011/0048158 | March 2011 | Maisonnier |
| 2011/0056321 | March 2011 | Sim |
| 2011/0067518 | March 2011 | Park |
| 2011/0113914 | May 2011 | Zhang |
| 2011/0126651 | June 2011 | Pan |
| 2011/0137423 | June 2011 | Ouyang |
| 2011/0214524 | September 2011 | Jacobsen |
| 2011/0314949 | December 2011 | Long |
| 2012/0011956 | January 2012 | Lundberg |
| 2012/0048047 | March 2012 | Zhang |
| 2012/0067150 | March 2012 | Zhang |
| 2012/0204670 | August 2012 | Ryland |
| 2012/0271207 | October 2012 | Schoen |
| 2012/0291582 | November 2012 | Kang |
| 2013/0104676 | May 2013 | Yang |
| 2013/0282174 | October 2013 | Xi |
| 2013/0296746 | November 2013 | Herr |
| 2014/0007730 | January 2014 | DeLouis |
| 2014/0123800 | May 2014 | Choi |
| 2014/0213409 | July 2014 | Yoon |
| 2015/0114163 | April 2015 | Rosheim |
| 2015/0122071 | May 2015 | Lee |
| 2015/0190246 | July 2015 | Ryu |
| 2015/0272811 | October 2015 | Choi |
| 2016/0038313 | February 2016 | Kim |
| 2016/0114479 | April 2016 | Rosheim |
| 2016/0288319 | October 2016 | Kfoury |
| 2017/0120453 | May 2017 | Roy |
| 2017/0297197 | October 2017 | King |
| 2017/0319421 | November 2017 | Julin |
| 2017/0348852 | December 2017 | Sarh |
| 2018/0009116 | January 2018 | Jeong et al. |
| 2018/0079084 | March 2018 | Woo et al. |
| 2018/0133894 | May 2018 | Choi et al. |
| 2018/0140441 | May 2018 | Poirters |
| 2018/0193172 | July 2018 | Smith et al. |
| 2018/0236655 | August 2018 | Nakanishi |
Attorney, Agent or Firm: Studebaker & Brackett PC
Description
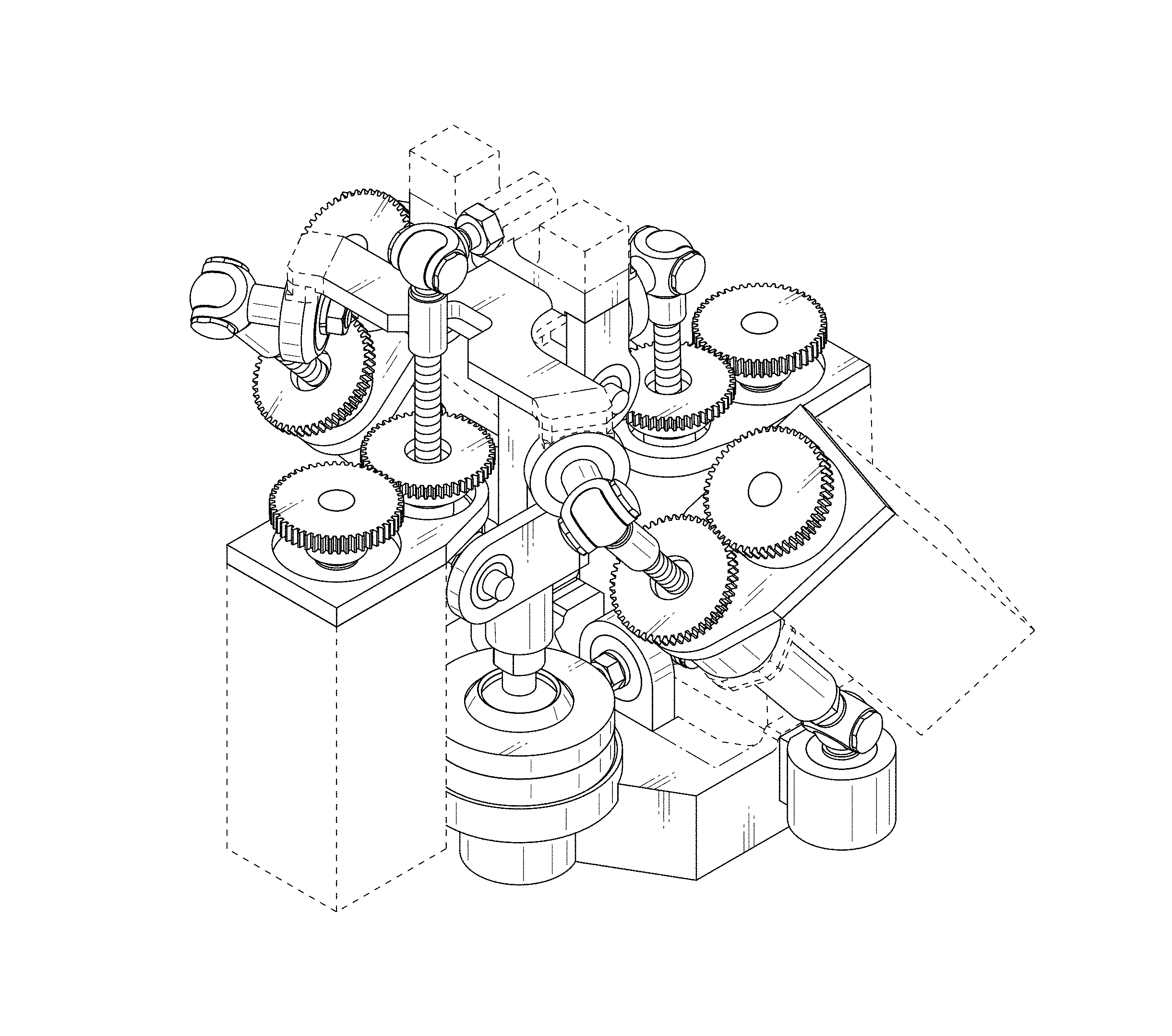
FIG. 1 is a front perspective view of the front, right, and top sides of a joint driving member for robot showing our new design;
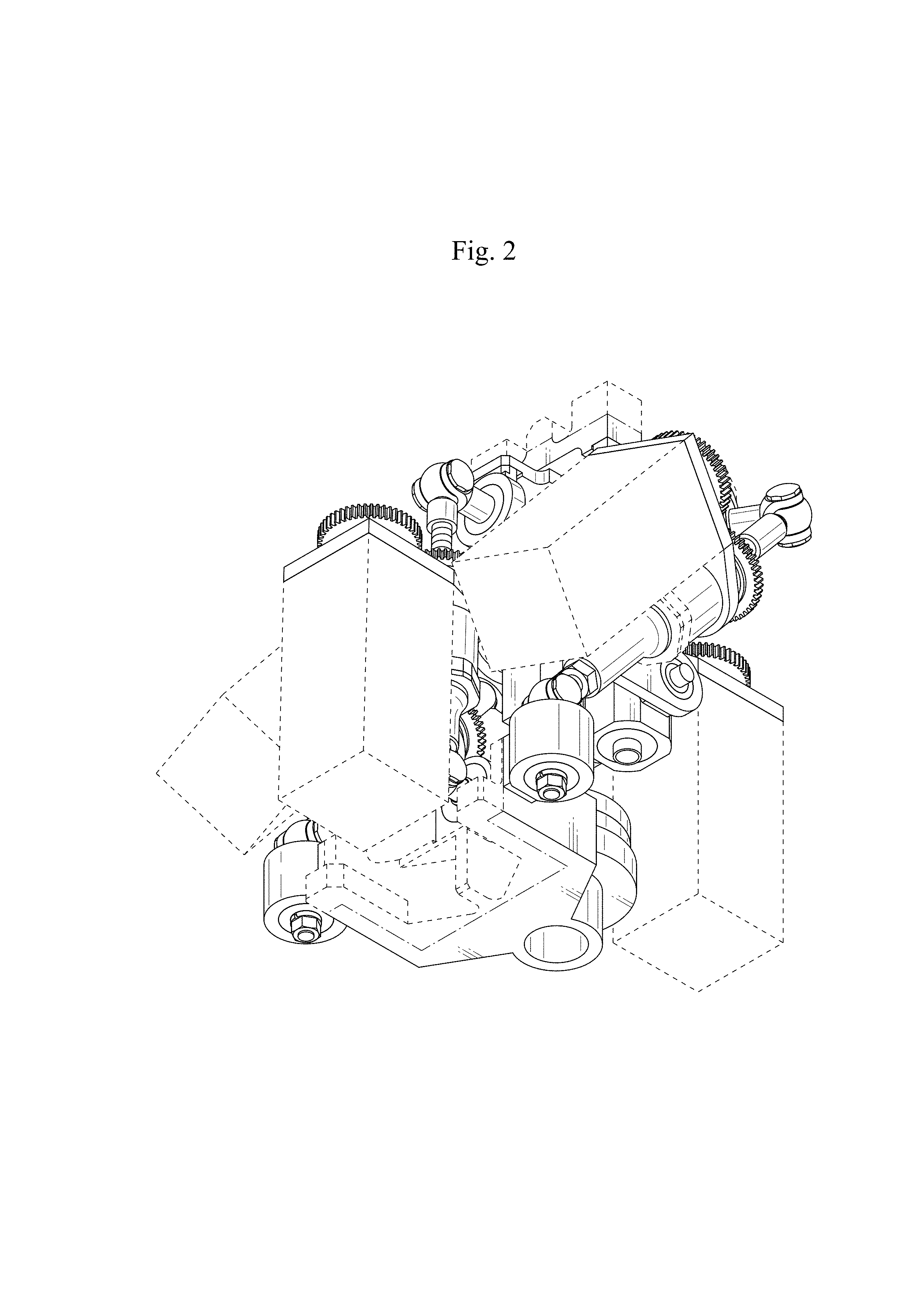
FIG. 2 is a rear perspective view of the rear, left, and bottom sides thereof;
FIG. 3 is a front view thereof;
FIG. 4 is a rear view thereof;
FIG. 5 is a left side view thereof;
FIG. 6 is a right side view thereof;
FIG. 7 is a top plan view thereof;
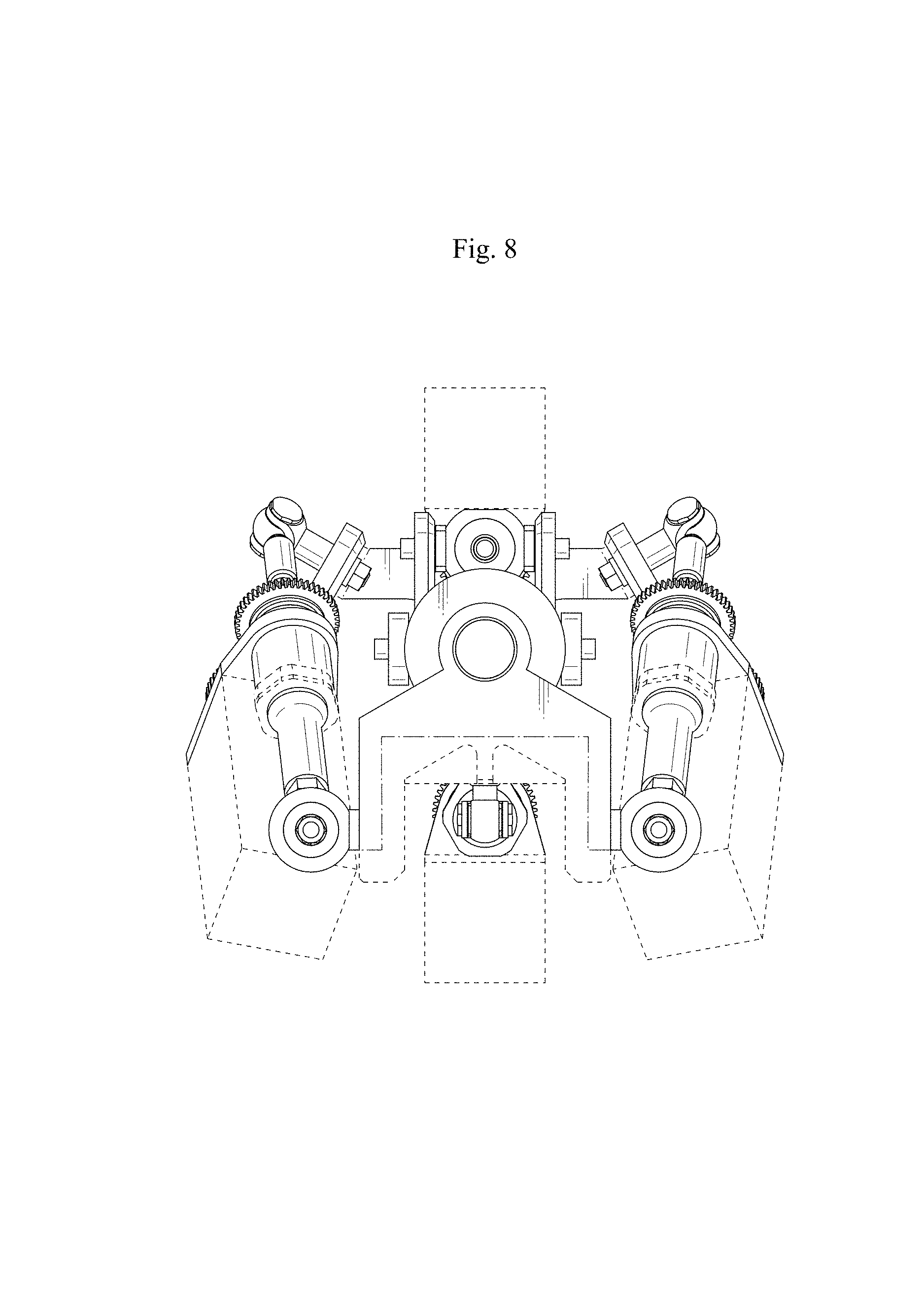
FIG. 8 is a bottom plan view thereof; and,
FIG. 9 is a right side view showing a state where a hinge angle is changed.
The broken lines shown represent unclaimed subject matter of the joint driving member for robot or environments and form no part of the claimed design.
The dash-dot lines represent the boundary between the claimed design and unclaimed design and form no part of the claimed design.
* * * * *
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.