Low cost planar spring for force sensor
Govari , et al.
U.S. patent number 10,660,574 [Application Number 15/452,865] was granted by the patent office on 2020-05-26 for low cost planar spring for force sensor. This patent grant is currently assigned to Biosense Webster (Israel) Ltd.. The grantee listed for this patent is BIOSENSE WEBSTER (ISRAEL) LTD.. Invention is credited to Yehuda Algawi, Christopher Thomas Beeckler, Assaf Govari, Joseph Thomas Keyes, Ilya Sitnitsky.
| United States Patent | 10,660,574 |
| Govari , et al. | May 26, 2020 |
Low cost planar spring for force sensor
Abstract
A flexible probe has an assembly in its distal end that includes a transmitter and a receiver that receives signals from the transmitter for sensing a position of the receiver relative to the transmitter. A pair of flat spring coils disposed between the transmitter and the receiver deform in response to pressure exerted on the distal tip when the distal tip engages a wall of a body cavity.
| Inventors: | Govari; Assaf (Haifa, IL), Beeckler; Christopher Thomas (Brea, CA), Algawi; Yehuda (Binyamina, IL), Sitnitsky; Ilya (Nahariya, IL), Keyes; Joseph Thomas (Glendora, CA) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Applicant: |
|
||||||||||
| Assignee: | Biosense Webster (Israel) Ltd.
(Yokneam, IL) |
||||||||||
| Family ID: | 63077601 | ||||||||||
| Appl. No.: | 15/452,865 | ||||||||||
| Filed: | March 8, 2017 |
Prior Publication Data
| Document Identifier | Publication Date | |
|---|---|---|
| US 20180256110 A1 | Sep 13, 2018 | |
| Current U.S. Class: | 1/1 |
| Current CPC Class: | A61B 5/107 (20130101); A61B 5/742 (20130101); A61B 5/062 (20130101); A61B 5/6885 (20130101); A61B 5/065 (20130101); A61B 90/06 (20160201); A61B 18/1492 (20130101); A61B 2018/00351 (20130101); A61B 2018/00791 (20130101); A61B 2090/065 (20160201); A61B 5/6852 (20130101); A61B 2018/00577 (20130101) |
| Current International Class: | A61B 5/00 (20060101); A61B 5/107 (20060101); A61B 5/06 (20060101); A61B 90/00 (20160101); A61B 18/00 (20060101); A61B 18/14 (20060101) |
| Field of Search: | ;324/206,207.11-207.26,754.01-754.21,230,242,243,239 |
References Cited [Referenced By]
U.S. Patent Documents
| 5099845 | March 1992 | Besz |
| 6226542 | May 2001 | Reisfeld |
| 6241724 | June 2001 | Fleischman et al. |
| 6301496 | October 2001 | Reisfeld |
| 6695808 | February 2004 | Tom |
| 6757557 | June 2004 | Bladen |
| 6814733 | November 2004 | Yitzhack Schwartz et al. |
| 6892091 | May 2005 | Ben-Haim et al. |
| 6915149 | July 2005 | Ben-Haim |
| 6997924 | February 2006 | Schwartz et al. |
| 7156816 | January 2007 | Schwartz et al. |
| 7536218 | May 2009 | Govari et al. |
| 7756576 | July 2010 | Levin |
| 9232947 | January 2016 | Brenner |
| 2003/0187347 | October 2003 | Nevo |
| 2005/0267332 | December 2005 | Paul et al. |
| 2007/0100332 | May 2007 | Paul et al. |
| 2009/0093806 | April 2009 | Govari et al. |
| 2009/0099551 | April 2009 | Tung et al. |
| 2011/0130648 | June 2011 | Beeckler et al. |
| 2013/0102868 | April 2013 | Fandrey et al. |
| 2014/0018665 | January 2014 | Meredith et al. |
| 2014/0275865 | September 2014 | Tammam |
| 2014/0276006 | September 2014 | Sliwa et al. |
| 2015/0272443 | October 2015 | Sliwa et al. |
| 2017/0035358 | February 2017 | Rankin |
| 2017/0055873 | March 2017 | Clark et al. |
| 2017/0354467 | December 2017 | Rankin |
| 2018/0085158 | March 2018 | Aeby |
| 205041520 | Feb 2016 | CN | |||
| 205041520 | Feb 2016 | CN | |||
| WO 96/05768 | Feb 1996 | WO | |||
Other References
|
Machine Translation of CN 205041520 U (Year: 2016). cited by examiner . Internet Archive, ASBG.com, "Flat Spiral Springs, Power Springs & Constant Force Springs" Feb. 11, 2016. Retrieved from <https://web.archive.org/web/20160211190718/https://www.asbg.com/produ- cts/springs-overview/flat-spiral-springs-power-springs.aspx> (Year: 2016). cited by examiner . St. Mary Spring, "Flat Wire Springs--Reasons for their Popularity" stmaryspring.com, Jan. 20, 2016. Retrieved from <http://www.stmarysspring.com/blog/flat-wire-springs-reasons-for-their- -popularity/> (Year: 2016). cited by examiner . Radial. (2016). In Editors of the American Heritage Dictionaries (Ed.), The American Heritage (R) dictionary of the English language (6th ed.). Boston, MA: Houghton Mifflin. Retrieved from https://search.credoreference.com/content/entry/hmdictenglang/radial/0?in- stitutionId=743 (Year: 2016). cited by examiner . Radial. (2015). In C. Schwarz, The Chambers Dictionary (13th ed.). London, UK: Chambers Harrap. Retrieved from https://search.credoreference.com/content/entry/chambdict/radial/0?instit- utionId=743 (Year: 2015). cited by examiner . Pending U.S. Appl. No. 14/974,731, filed Dec. 18, 2015. cited by applicant . Pending U.S. Appl. No. 15/347,242, filed Nov. 9, 2016. cited by applicant . Ataollahi, Asghar et al., "Novel Force Sensing Approach Employing Prismatic-Tip Optical Fiber Inside an Orthoplanar Spring Structure", IEEE/ASME Tranactions on Mechatronics, Feb. 2014, pp. 121-130, vol. 19 No. 1. cited by applicant . European Search Report dated Jun. 28, 2018 from corresponding European Patent Application No. 18160408.3. cited by applicant . European Search Report for corresponding EPA No. 19189057.3 dated Oct. 18, 2019. cited by applicant. |
Primary Examiner: McCrosky; David J.
Claims
The invention claimed is:
1. An apparatus, comprising: a flexible probe having a proximal portion, a distal end and defining a longitudinal axis, the probe adapted for insertion into a body cavity of a living subject, the probe having a distal tip at the distal end of the probe; and a contact force sensor in the distal end of the probe, comprising: a transmitter; a receiver receiving signals from the transmitter for sensing a position of the receiver relative to the transmitter; and an assembly disposed between the transmitter and the receiver, the assembly including first and second flat spring coils each having a generally ring shape with an internal edge and an external edge, a spacer positioned between the first and second flat spring coils configured to maintain the first and second flat spring coils apart, the spacer mating with the internal edges of the first and second flat spring coils, a transmitter retainer attached to the transmitter and mating with the external edge of the first flat spring coil, and a receiver retainer attached to the receiver and mating with the external edge of the second flat spring coil, wherein the diameter of the first and second flat spring coils change when under deformation thereby changing the distance between the transmitter and the receiver.
2. The apparatus according to claim 1, wherein the transmitter and the receiver comprise planar printed circuit boards.
3. The apparatus according to claim 2, wherein a magnetically permeable material is placed on top of each of the planar printed circuit boards.
4. The apparatus according to claim 3, wherein the material comprises at least one plate of mu-metal on each of the planar printed circuit boards.
5. The apparatus according to claim 1, wherein the contact force sensor, the transmitter and the receiver comprise an integral subassembly.
6. The apparatus according to claim 1, wherein the receiver comprises three receiving coils.
7. The apparatus according to claim 1, wherein the transmitter comprises three transmitting coils.
8. The apparatus according to claim 7, wherein the three transmitting coils are connected in series and powered by exactly one generator.
9. The apparatus according to claim 7, wherein the three transmitting coils are powered by respective generators at different frequencies.
10. A method, comprising the steps of: providing a flexible probe having a proximal portion, a distal end and defining a longitudinal axis, the probe adapted for insertion into a body cavity of a living subject, the probe having a distal tip at the distal end of the probe, a contact force sensor in the distal end of the probe, the contact force sensor comprising: a transmitter; a receiver; and an assembly disposed between the transmitter and the receiver, the assembly including first and second flat spring coils each having a generally ring shape with an internal edge and an external edge, a spacer positioned between the first and second flat spring coils configured to maintain the first and second flat spring coils apart, the spacer mating with the internal edges of the first and second flat spring coils, a transmitter retainer attached to the transmitter and matting with the external edge of the first flat spring coil, and a receiver retainer attached to the receiver and mating with the external edge of the second flat spring coil, wherein the diameter of the first and second flat spring coils change when under deformation thereby changing the distance between the transmitter and the receiver; deforming the first and second flat spring coils by exerting pressure on the distal tip when the distal tip engages a wall of the body cavity; while deforming the resilient element: emitting signals from the transmitter; receiving the signals in the receiver and processing the signals to determine a position of the receiver relative to the transmitter.
11. The method according to claim 10, wherein the transmitter and the receiver comprise planar printed circuit boards.
12. The method according to claim 11, wherein a material having high magnetic permeability is placed on top of each of the planar printed circuit boards.
13. The method according to claim 12, wherein the material comprises at least one plate of mu-metal on each of the planar printed circuit boards.
14. The method according to claim 10, wherein the contact force sensor, the transmitter and the receiver comprise an integral subassembly.
15. The method according to claim 10, wherein the receiver comprises three receiving coils.
16. The method according to claim 10, wherein the transmitter comprises three transmitting coils.
17. The method according to claim 16, wherein the three transmitting coils are connected in series and powered by exactly one generator.
18. The method according to claim 16, wherein the three transmitting coils are powered by respective generators at different frequencies.
19. The method according to claim 10, further comprising measuring a distance between the transmitter and the receiver according to an amplitude of the signals in the receiver.
Description
COPYRIGHT NOTICE
A portion of the disclosure of this patent document contains material that is subject to copyright protection. The copyright owner has no objection to the facsimile reproduction by anyone of the patent document or the patent disclosure, as it appears in the Patent and Trademark Office patent file or records, but otherwise reserves all copyright rights whatsoever.
BACKGROUND OF THE INVENTION
1. Field of the Invention
This invention relates to instruments for diagnostic and surgical purposes. More particularly, this invention relates to measurements of force, pressure or mechanical tension or compression using catheters for diagnostic and surgical procedures in the heart.
2. Description of the Related Art
Cardiac arrhythmias, such as atrial fibrillation, occur when regions of cardiac tissue abnormally conduct electric signals to adjacent tissue, thereby disrupting the normal cardiac cycle and causing asynchronous rhythm.
Procedures for treating arrhythmia include surgically disrupting the origin of the signals causing the arrhythmia, as well as disrupting the conducting pathway for such signals. By selectively ablating cardiac tissue by application of energy via a catheter, it is sometimes possible to block or modify the propagation of unwanted electrical signals from one portion of the heart to another. The ablation process destroys the unwanted electrical pathways by formation of non-conducting lesions.
Verification of physical electrode contact with the target tissue is important for controlling the delivery of ablation energy. Attempts in the art to verify electrode contact with the tissue have been extensive, and various techniques have been suggested. For example, U.S. Pat. No. 6,695,808 describes apparatus for treating a selected patient tissue or organ region. A probe has a contact surface that may be urged against the region, thereby creating contact pressure. A pressure transducer measures the contact pressure. This arrangement is said to meet the needs of procedures in which a medical instrument must be placed in firm but not excessive contact with an anatomical surface, by providing information to the user of the instrument that is indicative of the existence and magnitude of the contact force.
As another example, U.S. U.S. Pat. No. 6,241,724 describes methods for creating lesions in body tissue using segmented electrode assemblies. In one embodiment, an electrode assembly on a catheter carries pressure transducers, which sense contact with tissue and convey signals to a pressure contact module. The module identifies the electrode elements that are associated with the pressure transducer signals and directs an energy generator to convey RF energy to these elements, and not to other elements that are in contact only with blood.
A further example is presented in U.S. Pat. No. 6,915,149. This patent describes a method for mapping a heart using a catheter having a tip electrode for measuring local electrical activity. In order to avoid artifacts that may arise from poor tip contact with the tissue, the contact pressure between the tip and the tissue is measured using a pressure sensor to ensure stable contact.
U.S. Patent Application Publication 2007/0100332 describes systems and methods for assessing electrode-tissue contact for tissue ablation. An electromechanical sensor within the catheter shaft generates electrical signals corresponding to the amount of movement of the electrode within a distal portion of the catheter shaft. An output device receives the electrical signals for assessing a level of contact between the electrode and a tissue.
Commonly assigned U.S. Patent Application Publication No. 2009/0093806 to Govari et al., which is herein incorporated by reference, describes another application of contact pressure measurement, in which deformation in response to pressure on a resilient member located at the distal end of a catheter is measured using a sensor.
SUMMARY OF THE INVENTION
There is provided according to embodiments of the invention a flexible probe adapted for insertion into a body cavity of a living subject. The probe has a contact force sensor in its distal end, including a transmitter, a receiver receiving signals from the transmitter for sensing a position of the receiver relative to the transmitter. A resilient element disposed between the transmitter and the receiver is configured to deform in response to pressure exerted on the distal tip when the distal tip engages a wall of the body cavity. The resilient element is a pair of flat spring coils.
According to one aspect of the apparatus, the contact force sensor includes a spacer between the pair of flat spring coils, and two retainers at opposite ends of the contact force sensor in contact with the flat spring coils, respectively.
According to one aspect of the apparatus, the contact force sensor includes a deformable joint between the proximal portion and the distal end of the probe.
According to another aspect of the apparatus, the transmitter and the receiver comprise planar printed circuit boards.
According to yet another aspect of the apparatus, a magnetically permeable material is placed on top of each of the planar printed circuit boards.
According to a further aspect of the apparatus, the material includes at least one plate of mu-metal on each of the planar printed circuit boards.
According to an additional aspect of the apparatus, the contact force sensor, the transmitter and the receiver comprise an integral subassembly.
According to another aspect of the apparatus, the receiver includes three receiving coils.
According to an additional aspect of the apparatus, the transmitter includes three transmitting coils.
According to still another aspect of the apparatus, the three transmitting coils are connected in series and powered by exactly one generator.
According to yet another aspect of the apparatus, the three transmitting coils are powered by respective generators at different frequencies.
According to a further aspect of the apparatus, the contact force sensor, the transmitter and the receiver comprise an integral subassembly.
There is further provided according to embodiments of the invention a method, which is carried out by providing a flexible that is adapted for insertion into a body cavity of a living subject. The probe has contact force sensor in its distal end. The contact force sensor includes a transmitter, a receiver, and a resilient element disposed between the transmitter and the receiver. The resilient element is a pair of flat spring coils. The method is further carried out by deforming the resilient element by exerting pressure on the distal tip when the distal tip engages a wall of the body cavity, and while deforming the resilient element emitting signals from the transmitter, receiving the signals in the receiver and processing the signals to determine a position of the receiver relative to the transmitter.
According to an aspect of the method the distance between the transmitter and the receiver is measured according to an amplitude of the signals in the receiver.
BRIEF DESCRIPTION OF THE SEVERAL VIEWS OF THE DRAWINGS
For a better understanding of the present invention, reference is made to the detailed description of the invention, by way of example, which is to be read in conjunction with the following drawings, wherein like elements are given like reference numerals, and wherein:
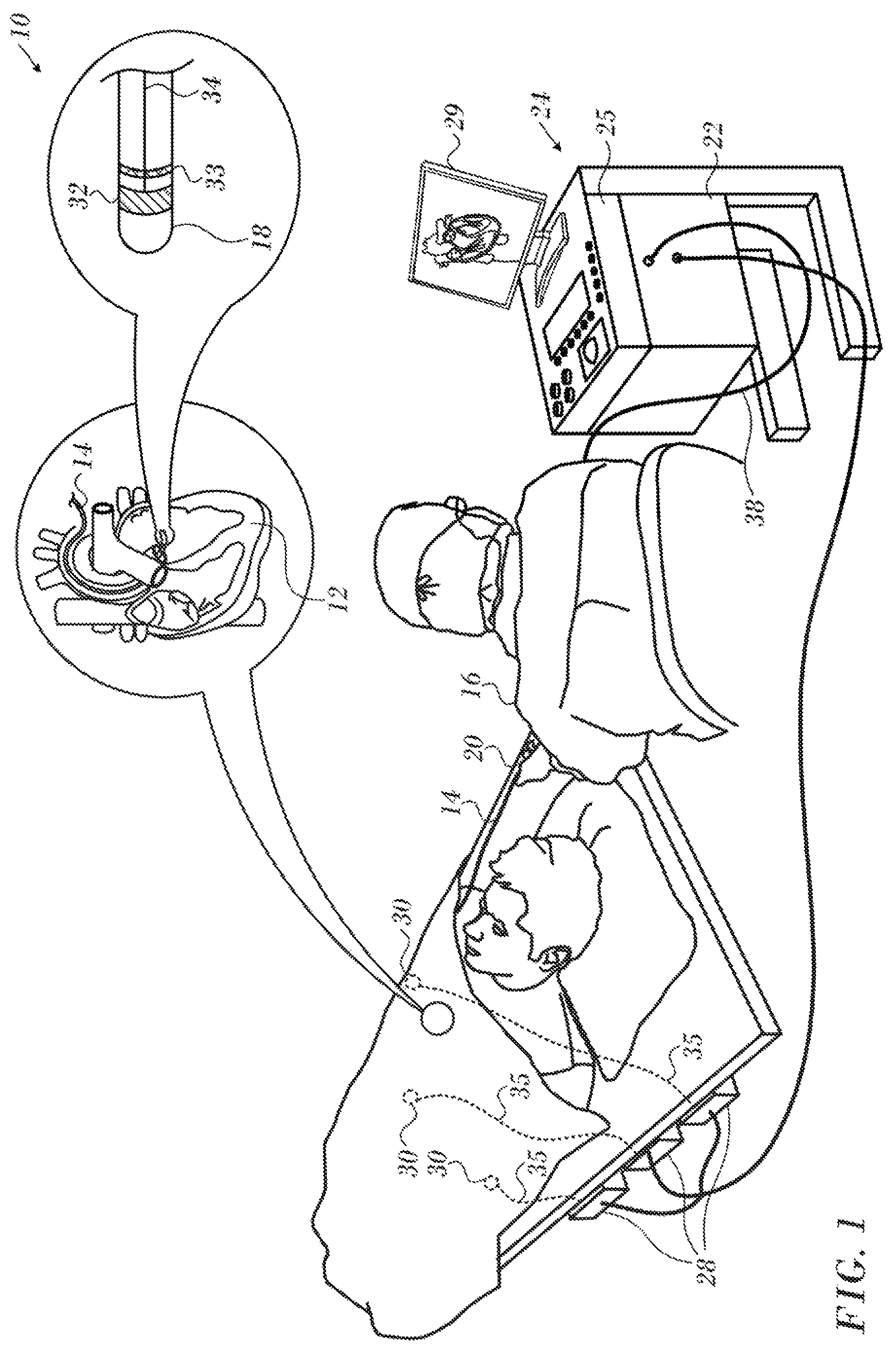
FIG. 1 is a pictorial illustration of a system for evaluating electrical activity in a heart of a living subject in accordance with an embodiment of the invention;
FIG. 2 is a partially cut-away view of distal portion of a catheter in accordance with an embodiment of the invention;
FIG. 3 is a subassembly suitable for use in the catheter shown in FIG. 3 in accordance with an embodiment of the invention;
FIG. 4 is an elevation of the distal portion of a cardiac catheter in accordance with an embodiment of the invention;
FIG. 5 is a magnified elevation of an assembly in the distal portion of a cardiac catheter in accordance with an alternate embodiment of the invention;
FIG. 6 is a schematic sectional view of the distal end of a catheter in accordance with an alternate embodiment of the invention;
FIG. 7 is an exploded view of the assembly shown in FIG. 6 in slight perspective in accordance with an embodiment of the invention;
FIG. 8, which is top view of a planar assembly of a contact force sensor with integrated location coils in accordance with an embodiment of the invention;
FIG. 9, which is an oblique view of a spring assembly in accordance with an embodiment of the invention; and
FIG. 10 is a side elevation of the assembly shown in in FIG. 9 in accordance with an embodiment of the invention.
DETAILED DESCRIPTION OF THE INVENTION
In the following description, numerous specific details are set forth in order to provide a thorough understanding of the various principles of the present invention. It will be apparent to one skilled in the art, however, that not all these details are necessarily needed for practicing the present invention. In this instance, well-known circuits, control logic, and the details of computer program instructions for conventional algorithms and processes have not been shown in detail in order not to obscure the general concepts unnecessarily.
Documents incorporated by reference herein are to be considered an integral part of the application except that, to the extent that any terms are defined in these incorporated documents in a manner that conflicts with definitions made explicitly or implicitly in the present specification, only the definitions in the present specification should be considered.
System Overview.
Turning now to the drawings, reference is initially made to FIG. 1, which is a pictorial illustration of a system 10 for evaluating electrical activity and performing ablative procedures on a heart 12 of a living subject, which is constructed and operative in accordance with a disclosed embodiment of the invention. The system comprises a catheter 14, which is percutaneously inserted by an operator 16 through the patient's vascular system into a chamber or vascular structure of the heart 12. The operator 16, who is typically a physician, brings the catheter's distal tip 18 into contact with the heart wall, for example, at an ablation target site. Electrical activation maps may be prepared, according to the methods disclosed in U.S. Pat. Nos. 6,226,542, and 6,301,496, and in commonly assigned U.S. Pat. No. 6,892,091, whose disclosures are herein incorporated by reference. One commercial product embodying elements of the system 10 is available as the CARTO.RTM. 3 System, available from Biosense Webster, Inc., 3333 Diamond Canyon Road, Diamond Bar, Calif. 91765. This system may be modified by those skilled in the art to embody the principles of the invention described herein.
Areas determined to be abnormal, for example by evaluation of the electrical activation maps, can be ablated by application of thermal energy, e.g., by passage of radiofrequency electrical current through wires in the catheter to one or more electrodes at the distal tip 18, which apply the radiofrequency energy to the myocardium. The energy is absorbed in the tissue, heating it to a point (typically above 50.degree. C.) at which it permanently loses its electrical excitability. When successful, this procedure creates non-conducting lesions in the cardiac tissue, which disrupt the abnormal electrical pathway causing the arrhythmia. The principles of the invention can be applied to different heart chambers to diagnose and treat many different cardiac arrhythmias.
The catheter 14 typically comprises a handle 20, having suitable controls on the handle to enable the operator 16 to steer, position and orient the distal end of the catheter as desired for the ablation. To aid the operator 16, the distal portion of the catheter 14 contains position sensors (not shown) that provide signals to a processor 22, located in a console 24. The processor 22 may fulfill several processing functions as described below.
Ablation energy and electrical signals can be conveyed to and from the heart 12 through one or more ablation electrodes 32 located at or near the distal tip 18 via cable 34 to the console 24. Pacing signals and other control signals may be conveyed from the console 24 through the cable 34 and the electrodes 32 to the heart 12. Sensing electrodes 33, also connected to the console 24 are disposed between the ablation electrodes 32 and have connections to the cable 34.
Wire connections 35 link the console 24 with body surface electrodes 30 and other components of a positioning sub-system for measuring location and orientation coordinates of the catheter 14. The processor 22 or another processor (not shown) may be an element of the positioning subsystem. The electrodes 32 and the body surface electrodes 30 may be used to measure tissue impedance at the ablation site as taught in U.S. Pat. No. 7,536,218, issued to Govari et al., which is herein incorporated by reference. A temperature sensor (not shown), typically a thermocouple or thermistor, may be mounted on or near each of the electrodes 32.
The console 24 typically contains one or more ablation power generators 25. The catheter 14 may be adapted to conduct ablative energy to the heart using any known ablation technique, e.g., radiofrequency energy, ultrasound energy, cryogenic energy, and laser-produced light energy. Such methods are disclosed in commonly assigned U.S. Pat. Nos. 6,814,733, 6,997,924, and 7,156,816, which are herein incorporated by reference.
In one embodiment, the positioning subsystem comprises a magnetic position tracking arrangement that determines the position and orientation of the catheter 14 by generating magnetic fields in a predefined working volume and sensing these fields at the catheter, using field generating coils 28. The positioning subsystem is described in U.S. Pat. No. 7,756,576, which is hereby incorporated by reference, and in the above-noted U.S. Pat. No. 7,536,218.
As noted above, the catheter 14 is coupled to the console 24, which enables the operator 16 to observe and regulate the functions of the catheter 14. Console 24 includes a processor, preferably a computer with appropriate signal processing circuits. The processor is coupled to drive a monitor 29. The signal processing circuits typically receive, amplify, filter and digitize signals from the catheter 14, including signals generated by sensors such as electrical, temperature and contact force sensors, and a plurality of location sensing electrodes (not shown) located distally in the catheter 14. The digitized signals are received and used by the console 24 and the positioning system to compute the position and orientation of the catheter 14, and to analyze the electrical signals from the electrodes.
In order to generate electroanatomic maps, the processor 22 typically comprises an electroanatomic map generator, an image registration program, an image or data analysis program and a graphical user interface configured to present graphical information on the monitor 29.
Typically, the system 10 includes other elements, which are not shown in the figures for the sake of simplicity. For example, the system 10 may include an electrocardiogram (ECG) monitor, coupled to receive signals from one or more body surface electrodes, in order to provide an ECG synchronization signal to the console 24. As mentioned above, the system 10 typically also includes a reference position sensor, either on an externally applied reference patch attached to the exterior of the subject's body, or on an internally placed catheter, which is inserted into the heart 12 maintained in a fixed position relative to the heart 12. Conventional pumps and lines for circulating liquids through the catheter 14 for cooling the ablation site are provided. The system 10 may receive image data from an external imaging modality, such as an MRI unit or the like and includes image processors that can be incorporated in or invoked by the processor 22 for generating and displaying images.
First Embodiment
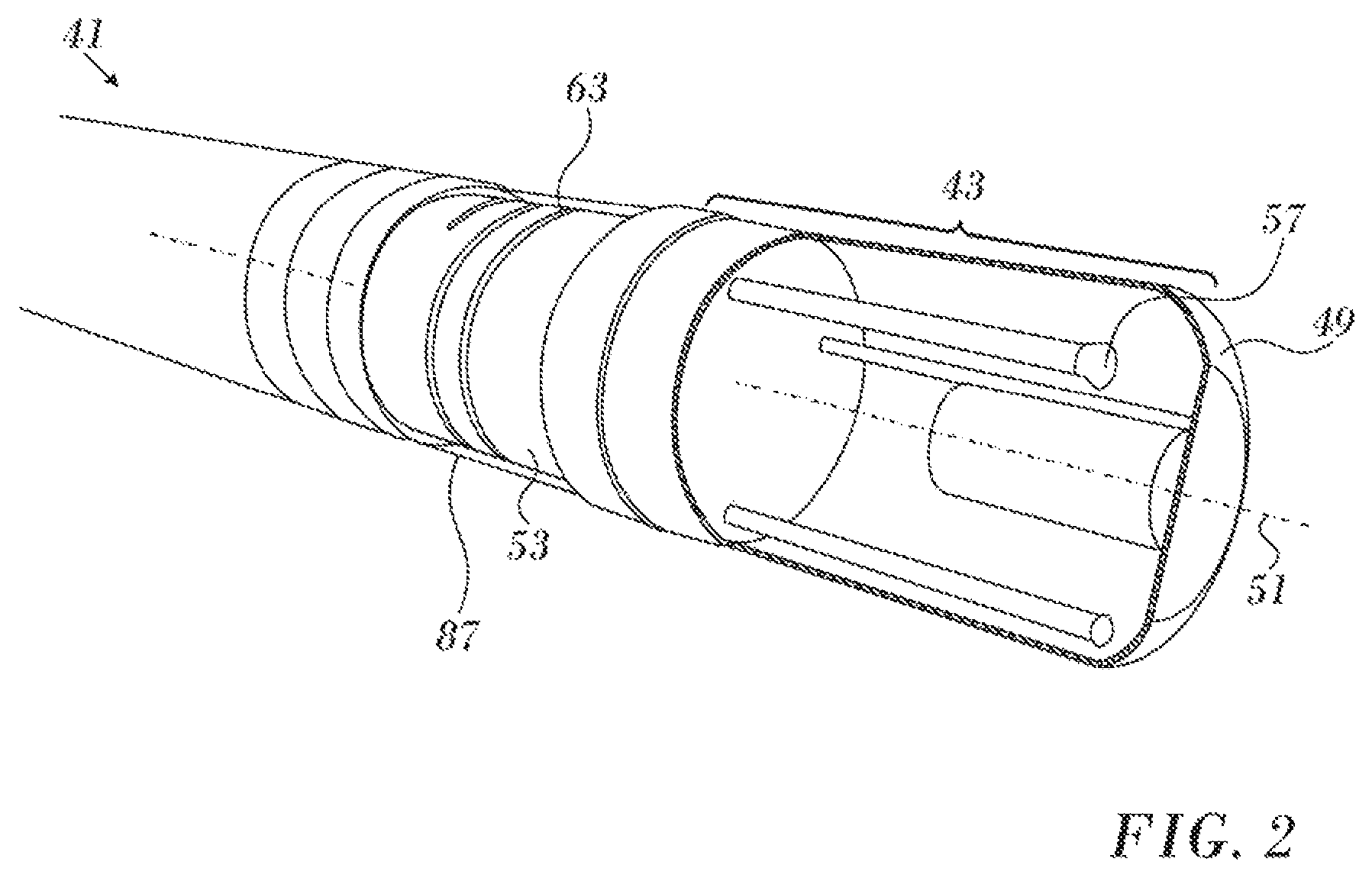
Reference is now made to FIG. 2 and to FIG. 3, which are respectively a partially cut-away view of distal portion 41 of a catheter and a schematic, partially exploded view an assembly 109 in the distal portion 41 in accordance with embodiments of the invention. As shown in FIG. 2, the distal portion 41 has an ablation electrode 43. A temperature sensor 57 may be present in the distal portion 41 to monitor temperatures at the ablation site. A deformable joint having a flexible spring, helix 63, is a tubular piece of an elastic material having a plurality of intertwined helical cuts therethrough along a portion of a length of the piece, which contracts and expands along axis of symmetry 51 as the contact force between the catheter and tissue varies.
Contact force sensor 53, which includes the deformable joint including helix 63, is disposed in the distal portion proximal to the ablation electrode 43. The contact force sensor 53 comprises by a radiofrequency receiver transmitter combination (not shown in FIG. 2). In this embodiment the receiver is proximal to the transmitter. However, they may be disposed in the opposite order. The contact force sensor 53 forms a deformable coupling member within the distal portion 41. The two part implementation simplifies assembly of a magnetic field generator and magnetic position sensor into the member.
The assembly 109 is typically covered by a flexible plastic sheath 87. When catheter 69 is used, for example, in ablating endocardial tissue by delivering radio-frequency electrical energy through electrode 89, considerable heat is generated in the area of distal tip 49. For this reason, it is desirable that plastic sheath 87 comprises a heat-resistant plastic material, such as polyurethane, whose shape and elasticity are not substantially affected by exposure to the heat. Most importantly, plastic sheath 87 serves to keep blood out of the interior of the catheter.
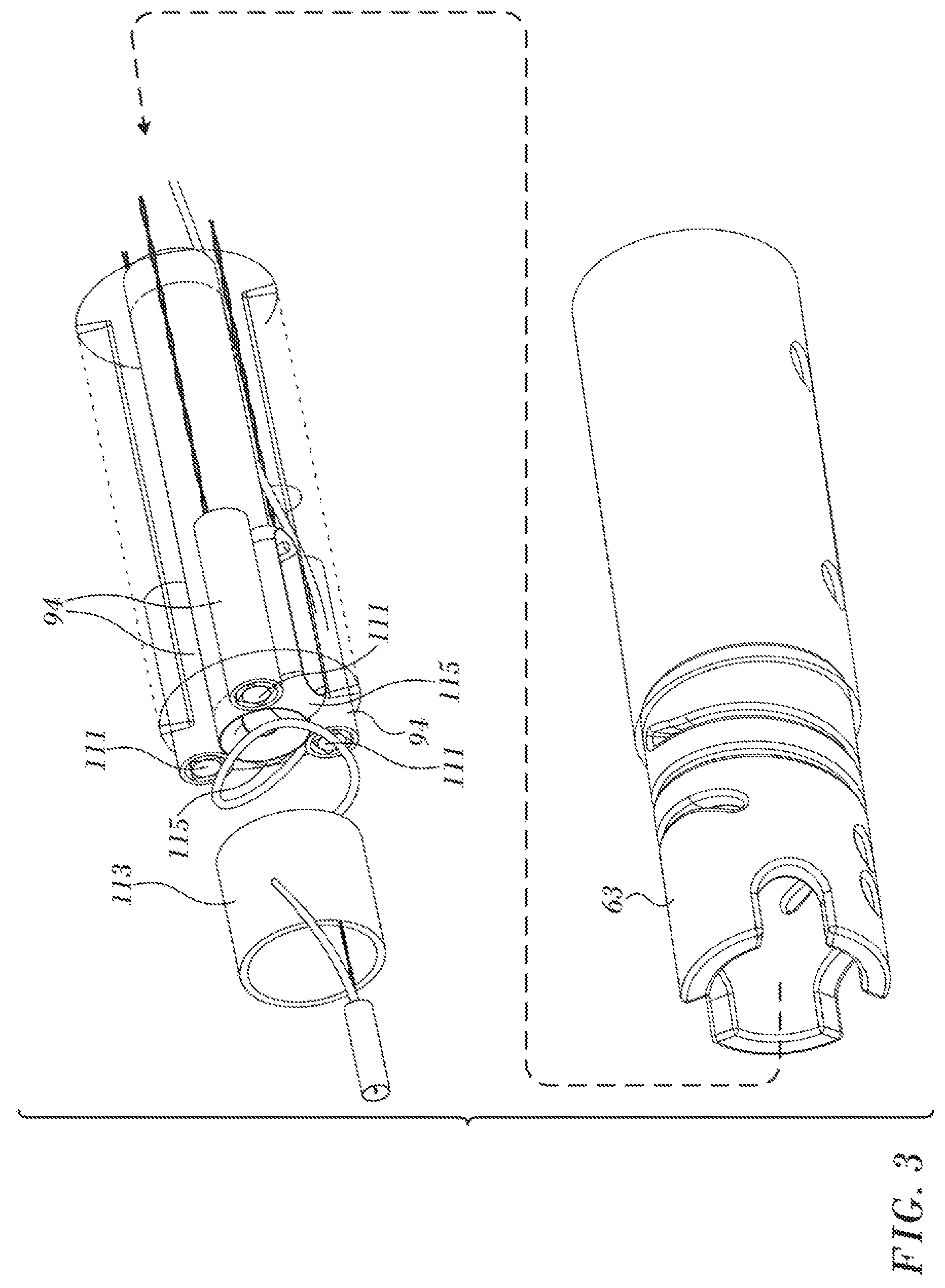
As best appreciated in FIG. 3, the contact force sensor 53 comprises a paired radiofrequency transmitter and receiver. The receiver is a set of three coils 94, optionally provided with internal ferrite cores 111 for signal enhancement. The coils 94 face a transmitting coil 113, which is a single frequency loop antenna that emits radiofrequency signals that are received in the coils 94. The three coils 94 generate signals from the incident radiofrequency radiation produced by transmitting coil 113. The amplitude of the received radiofrequency signals varies generally inversely with the distance between the coils 94 and the transmitting coil 113, and thus provides a measure of the contact force-dependent deformation of the helix 63. As will be seen from the description of the embodiments below, the transmitter and the receiver can be implemented respectively as planar printed circuit boards (PCBs). This reduces the overall size of the contact force sensor 53.
The assembly 109 comprises localizer coils 115 that function as a location detector by generating position-dependent signals from incident RF radiation produced by external field generating coils 28 (FIG. 1). The field generating coils 28 (typically nine) are fixed in a location pad that is positioned beneath a patient. The localizer coils 115 are circumscribed by the three coils 94.
In some embodiments the signals received in the three coils 94--may be distinguished by using different frequencies in the transmitting coil 113. Analysis of the force-dependent signals gives the magnitude of the force on the distal tip. The analysis may also reveal the orientation of the distal tip with respect to the axis of the proximal end of the helix 63, i.e., the amount of bending of the helix 63 about axis of symmetry 51.
A fuller description of a force sensor using these components is given in PCT Patent Document WO96/05768 of Ben Haim, commonly assigned U.S. Patent Application Publications No. 2011/0130648 and 2009/0093806 and commonly assigned application Ser. No. 14/974,731, which are herein incorporated by reference.
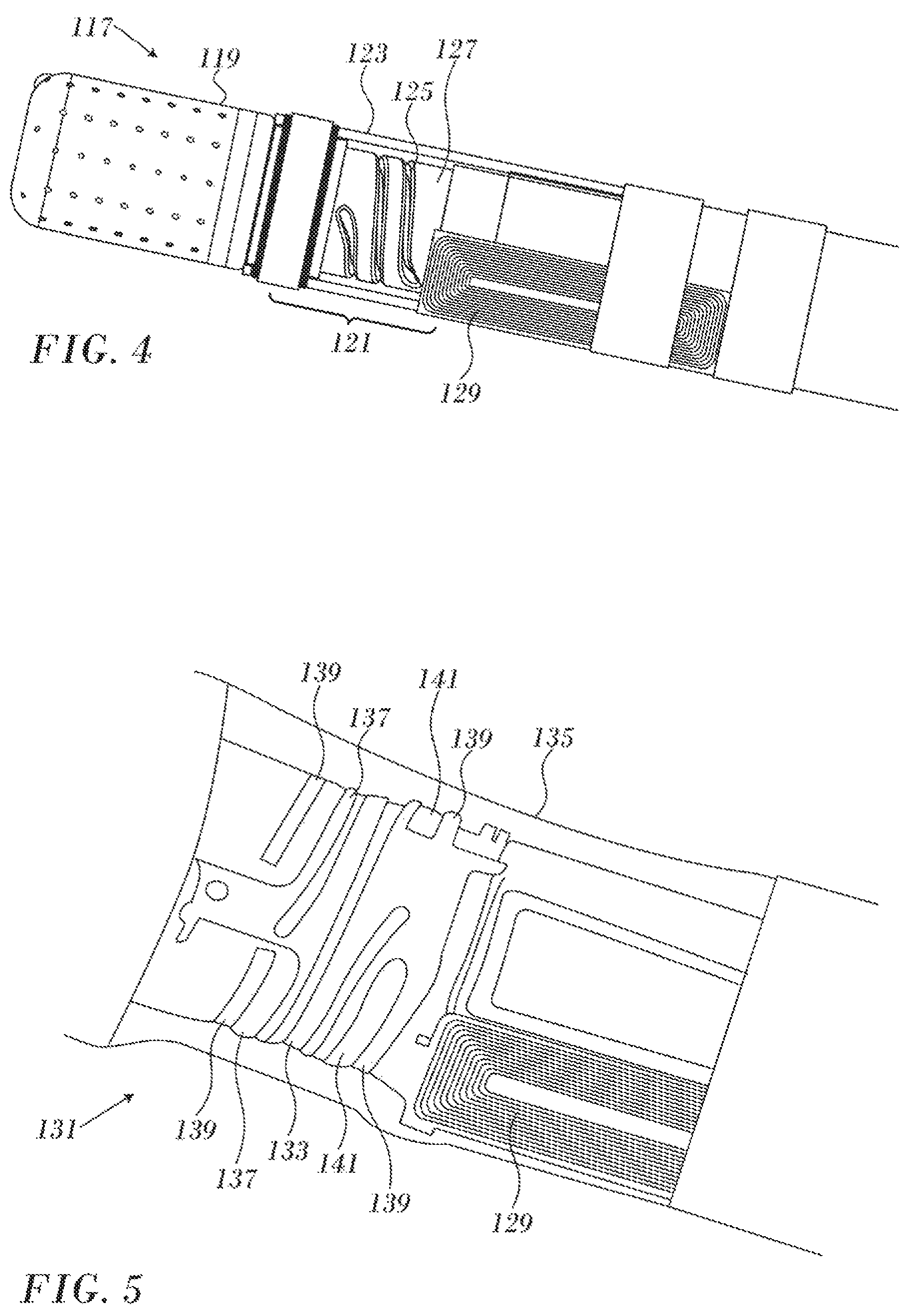
Reference is now made to FIG. 4, which is an elevation of the distal portion of a cardiac catheter 117 in accordance with an embodiment of the invention. The catheter 117 has an ablation electrode 119 at its distal end, and a resilient contact force sensor assembly 121 that includes a contact force sensor. Visible are a plastic sheath 123 that extends to the proximal portion of the ablation electrode 119. A deformable joint having a helical spring 125 is formed as a cut-out in tubular plastic material 127. A localizer coil 129 is disposed proximal to the spring 125. The transmitter and receiver shown in FIG. 3 are present, but not seen in FIG. 4.
Second Embodiment
Reference is now made to FIG. 5, which is a magnified view of an assembly 131 in the distal portion of a cardiac catheter in accordance with an alternate embodiment of the invention. The assembly 131 is similar to the assembly 121 (FIG. 3), except now a nitinol spring 133 is employed in the deformable joint of the contact force sensor. Plastic sheath 135 covers the spring 133. The spring 133 slides with respect to the sheath 135. The inner diameter of the sheath 135 is larger than the outer diameter of the spring 133. Edges of the receiving coils 137 and transmitting coils 141 are seen beneath the spring 133. A magnetically permeable material 139 resides on top of both transmitting and receiving coils.
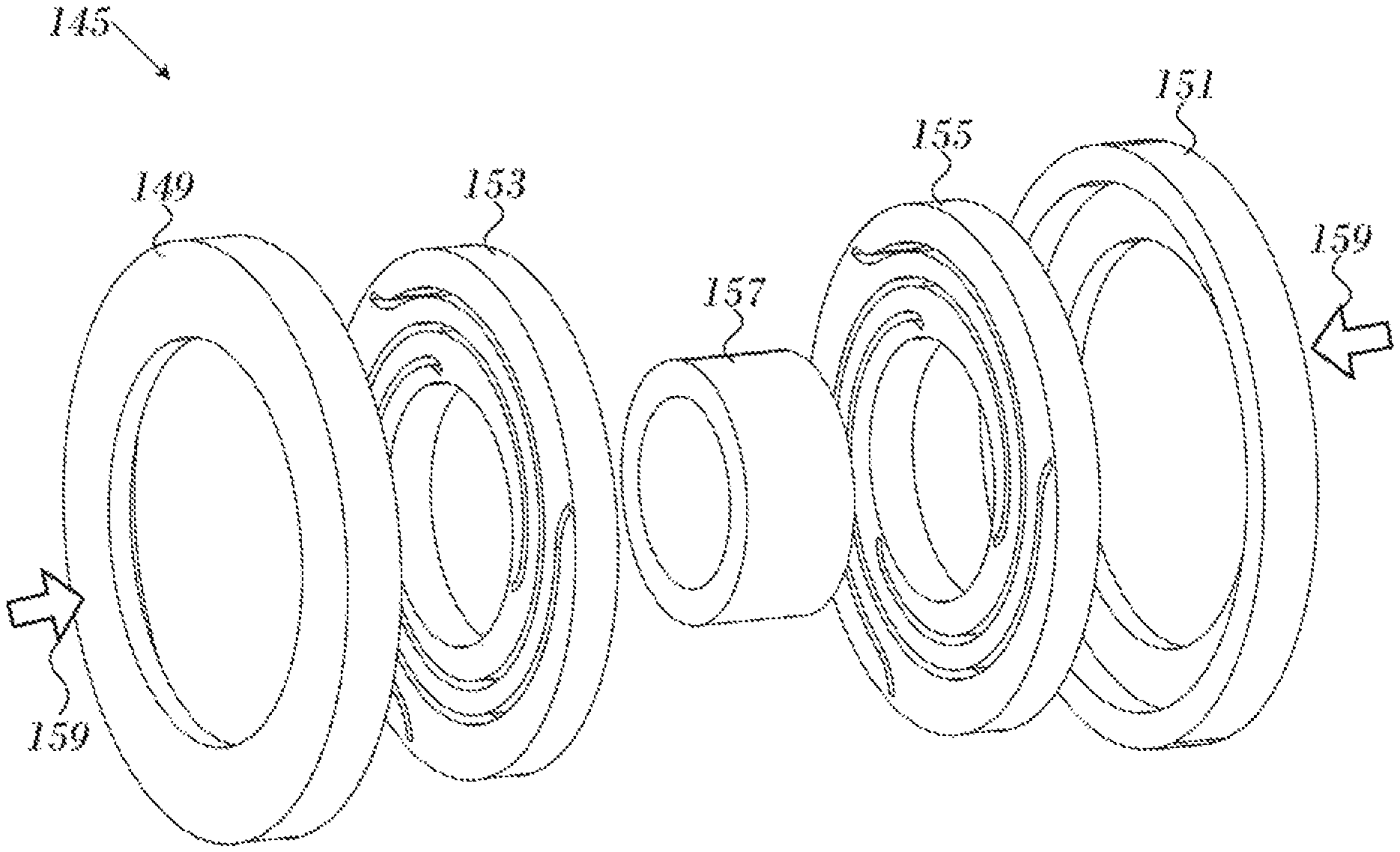
Third Embodiment
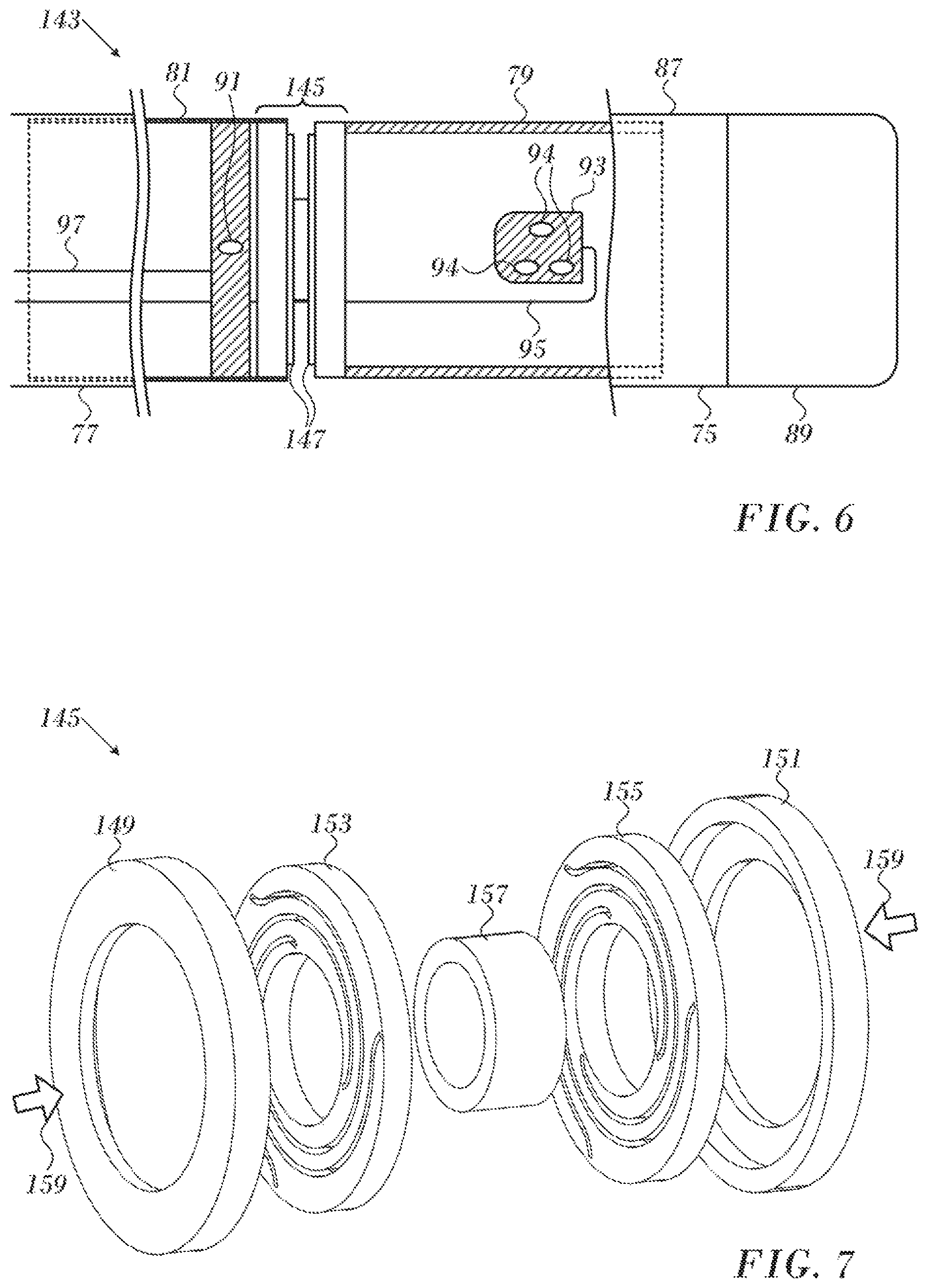
Reference is now made to FIG. 6, which is a schematic sectional view of the distal end of a catheter 143 in accordance with an alternate embodiment of the invention. In this embodiment the deformable joint includes an assembly 145 contains two flat spring coils 147. Typically the assembly 145 has a diameter of 2.5 mm and a length of 1 mm. Transmitter 91 and receiving coils 94 of receiver 93 are disposed on opposite sides of the assembly 145, and may comprise printed circuit boards. Conductors 95, 97 supply the transmitter 91 and receiver 93.
Reference is now made to FIG. 7, which is an exploded view of the assembly 145 (FIG. 5) shown in slight perspective in accordance with an embodiment of the invention. The assembly 145 has a transmitter retainer 149 and a receiver retainer 151. The transmitter 91 and receiver 93 (not shown in FIG. 6) may be attached to these retainers. The transmitter retainer 149 and receiver retainer 151 respectively mate with external edges of a first flat spring coil 153 and a second flat spring coil 155. The flat spring coils 153, 155 are held apart by a spacer 157, which mates with internal edges of the flat spring coils 153, 155. The flat spring coils 153, 155 deform in response to a compressive force that urge the transmitter retainer 149 and the receiver retainer 151 toward one another as indicated by arrows 159 in FIG. 6. The flat spring coils 153, 155 return to a resting state when the compressive force is removed.
The flat spring coils 153, 155 can be mass produced to reduce unit cost. The designs can be cut, stamped, or otherwise formed from planar sheet metal such as flat nitinol sheet and may be shape-set into their final forms. Minimizing thickness of the elastic portion of the spring is important in cardiac catheters, as the transmitter retainer 149 and receiver retainer 151 are at opposite ends of the contact force sensor, separating the transmitter 91 and receiver 93. (FIG. 5). The transmitter 91 and receiver 93 are separated by a distance in the range of 0.1-1.5 mm. Moreover, by laser-cutting the sheet metal into a pattern, no welds are necessary, which keeps unit cost low, as well as improving reliability relative to conventional welded springs.
Further details of techniques for manufacturing spring coils that are suitable, mutatis mutandis, for the flat spring coils 153, 155 are disclosed in commonly assigned, copending Application Ser. No. 15/347,242, entitled "Coils Formed in Folded Nitinol Sheet", whose disclosure is herein incorporated by reference.
As in the previous embodiment, the assembly 145, the transmitter 91 and the receiver 93 may be constructed as an integral module with an electrical connection between the transmit and receive section.
Fourth Embodiment
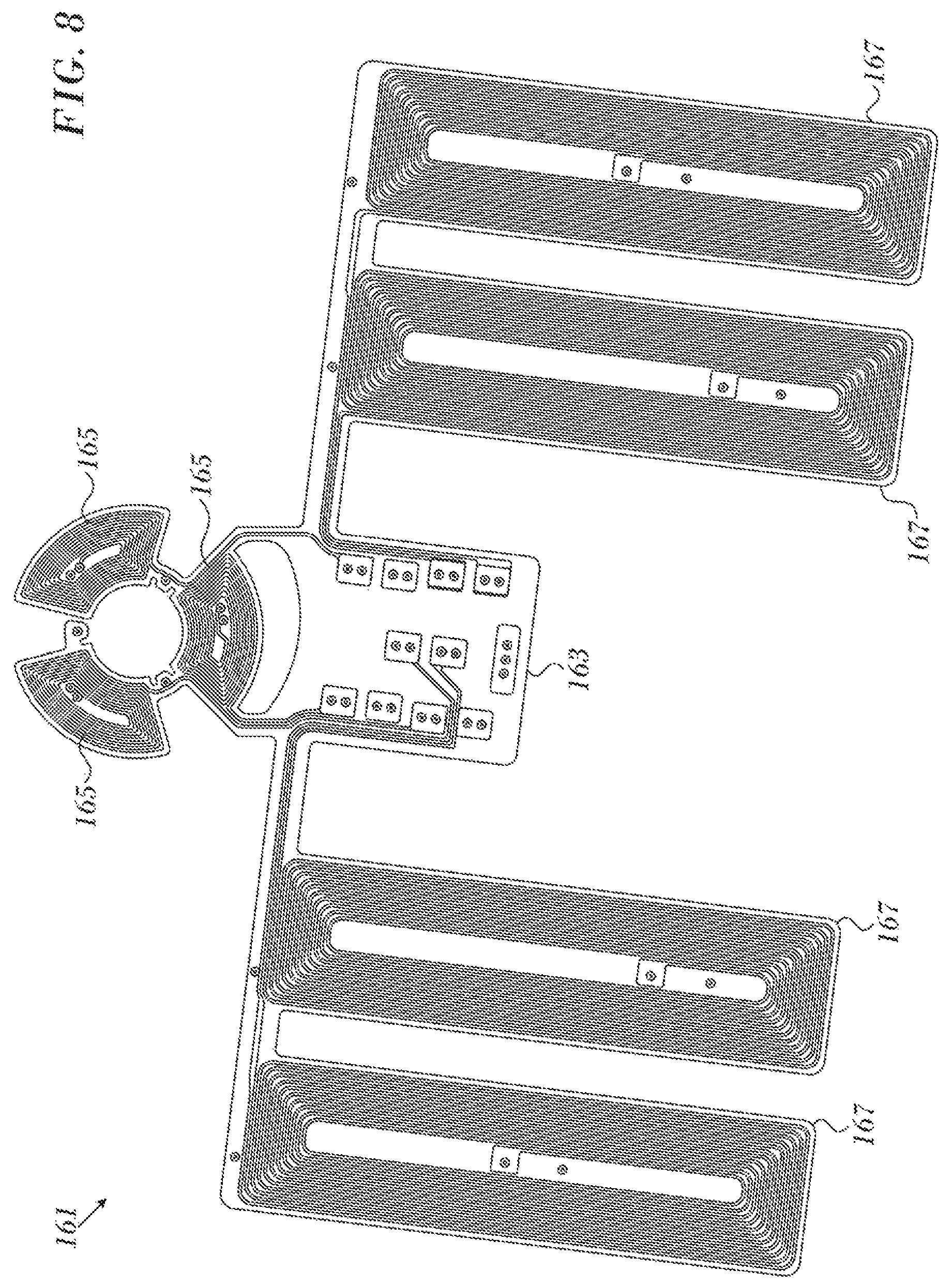
In this embodiment, the transmitter and receiver are planar structures attached to opposite ends of a flat spring coil. The distance between the transmitter and receiver varies as the spring coil deforms and relaxes. Reference is now made to FIG. 8, which is top view of a planar assembly 161 in a contact force sensor with integrated location coils in accordance with an embodiment of the invention. The assembly 161 can be mounted at either end of a flat spring coil (not shown), and has electronic circuitry 163 arranged formed as a circuit board, and configured as a transmitter or a receiver. The circuit board can be covered with a material having high magnetic permeability in order to improve magnetic alignment. The material can be mu-metal, for example, in the form of trapezoids that conform to the shape of the circuit board. The electronic circuitry 163 that is connected to three coils 165 circularly arranged at 120 degree angles. In this example the coils 165 are used as receiving coils.
The arrangement for transmitting coils is similar. When the coils 165 are used as transmitting coils, the transmitter comprises three individual transmitters. From the description below, it will be seen that the transmitting coils align with respective receiving coils, which increases the accuracy of the readings of the contact force sensor. The three transmitting coils may be connected so that they are either in series and can be powered with one AC generator or are in parallel where they can be run at different frequencies by different AC generators.
Also shown are optional windings 167. The windings 167 are components of the positioning sub-system noted in FIG. 1, which is outside the scope of this disclosure.
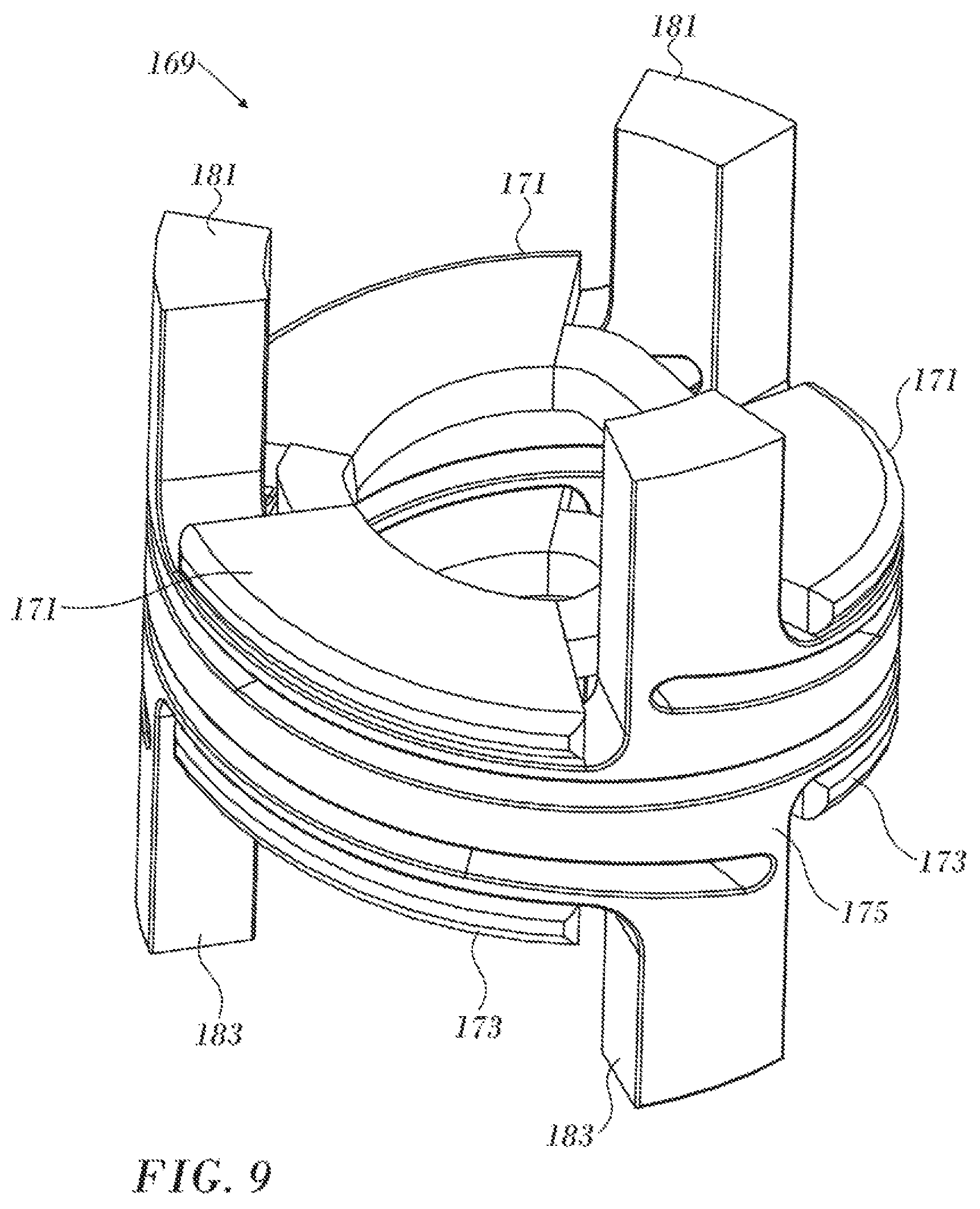
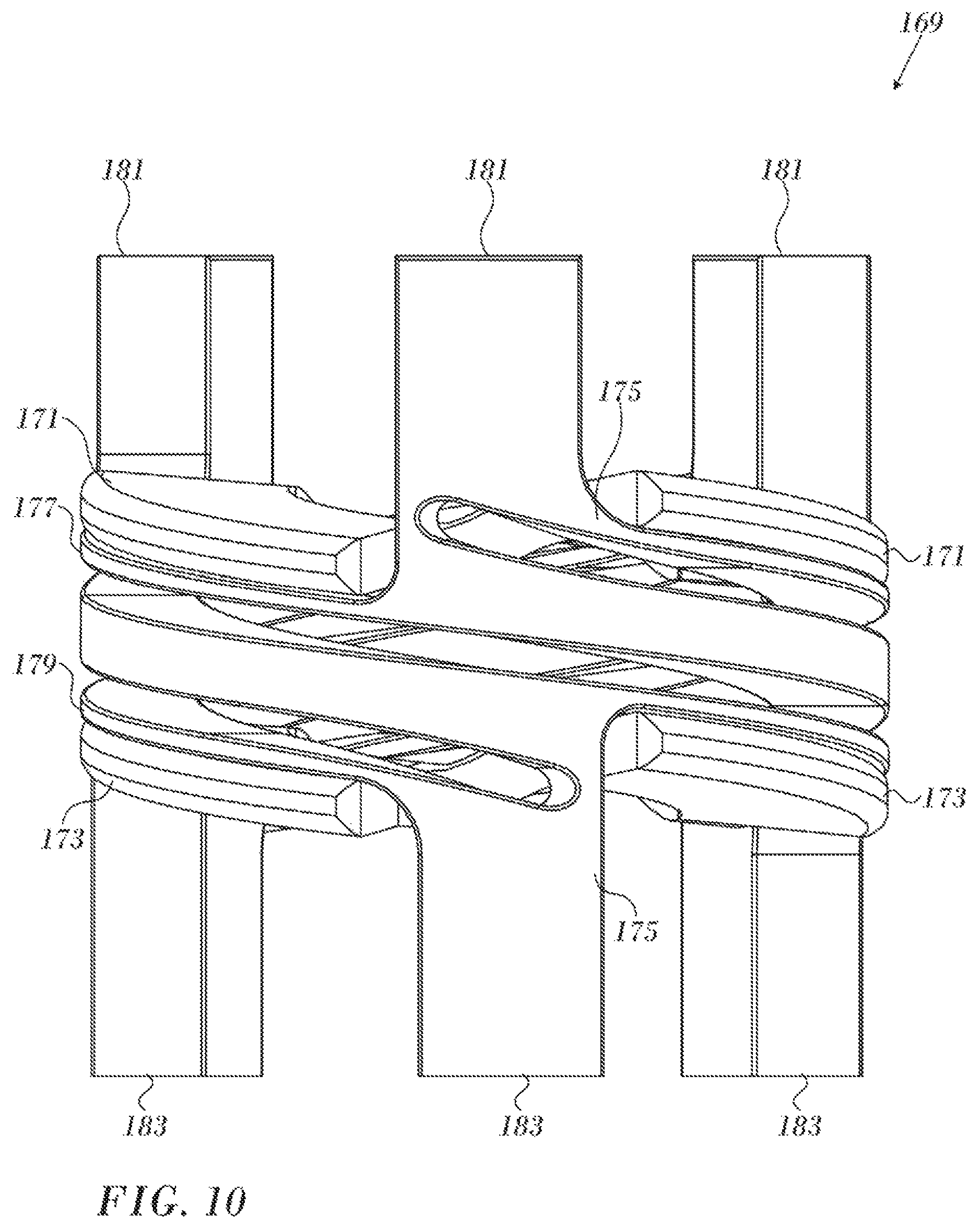
Reference is now made to FIG. 9, which is an oblique view of a spring assembly 169 in accordance with an embodiment of the invention. Three planar transmitting coils 171 oppose receiving coils 173 on opposite ends of a compressible spring 175 arranged as in a helix having at least three windings and flat surfaces.
Reference is now made to FIG. 10, which is a side elevation of the assembly 169 in accordance with an embodiment of the invention. The transmitting coils 171 and receiving coils 173 are flexible, and remain applied to the upper and lower flat surfaces 177, 179 of the spring 175 as the spring deforms responsively to compressive force acting against upper and lower legs 181, 183. The terms "upper" and "lower" are used arbitrarily herein to distinguish opposite directions. These terms have no physical meanings with respect to the actual configuration of the assembly 169.
It will be appreciated by persons skilled in the art that the present invention is not limited to what has been particularly shown and described hereinabove. Rather, the scope of the present invention includes both combinations and sub-combinations of the various features described hereinabove, as well as variations and modifications thereof that are not in the prior art, which would occur to persons skilled in the art upon reading the foregoing description.
* * * * *
References
-
asbg.com/products/springs-overview/flat-spiral-springs-power-springs.aspx
-
stmarysspring.com/blog/flat-wire-springs-reasons-for-their-popularity
-
search.credoreference.com/content/entry/hmdictenglang/radial/0?institutionId=743
-
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.