Display system utilizing vehicle and trailer dynamics
Aich , et al.
U.S. patent number 10,609,340 [Application Number 15/805,918] was granted by the patent office on 2020-03-31 for display system utilizing vehicle and trailer dynamics. This patent grant is currently assigned to Ford Global Technologies, LLC. The grantee listed for this patent is Ford Global Technologies, LLC. Invention is credited to Sudipto Aich, Alex Maurice Miller, John Shutko, Roger Arnold Trombley.





View All Diagrams
| United States Patent | 10,609,340 |
| Aich , et al. | March 31, 2020 |
Display system utilizing vehicle and trailer dynamics
Abstract
A vehicle and trailer display system is disclosed. The display system includes a plurality of imaging devices disposed on the vehicle, each having a field of view. The display system further includes a screen disposed in the vehicle operable to display images from the imaging devices. A controller is in communication with the imaging devices and the screen and is operable to receive a hitch angle corresponding to the angle between the vehicle and the trailer. Based on the hitch angle, the controller is operable to select a field of view of an imaging device to display on the screen.
| Inventors: | Aich; Sudipto (Palo Alto, CA), Trombley; Roger Arnold (Ann Arbor, MI), Shutko; John (Ann Arbor, MI), Miller; Alex Maurice (Canton, MI) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Applicant: |
|
||||||||||
| Assignee: | Ford Global Technologies, LLC
(Dearborn, MI) |
||||||||||
| Family ID: | 51525637 | ||||||||||
| Appl. No.: | 15/805,918 | ||||||||||
| Filed: | November 7, 2017 |
Prior Publication Data
| Document Identifier | Publication Date | |
|---|---|---|
| US 20180109762 A1 | Apr 19, 2018 | |
Related U.S. Patent Documents
| Application Number | Filing Date | Patent Number | Issue Date | ||
|---|---|---|---|---|---|
| 14289888 | May 29, 2014 | 9854209 | |||
| 14256427 | Nov 15, 2016 | 9493187 | |||
| 14249781 | Jun 21, 2016 | 9374562 | |||
| 14188213 | Feb 24, 2014 | ||||
| 13847508 | Mar 20, 2013 | ||||
| 14068387 | Aug 11, 2015 | 9102271 | |||
| 14059835 | Feb 2, 2016 | 9248858 | |||
| 13443743 | Sep 2, 2014 | 8825328 | |||
| 13336060 | Dec 9, 2014 | 8909426 | |||
| 14161832 | May 24, 2016 | 9346396 | |||
| 14059835 | Feb 2, 2016 | 9248858 | |||
| 14201130 | Mar 22, 2016 | 9290202 | |||
| 14068387 | Aug 11, 2015 | 9102271 | |||
| 61477132 | Apr 19, 2011 | ||||
| Current U.S. Class: | 1/1 |
| Current CPC Class: | B60W 10/18 (20130101); H04N 7/183 (20130101); B62D 15/027 (20130101); B60D 1/245 (20130101); B60W 10/20 (20130101); B60W 30/18036 (20130101); B60W 10/04 (20130101); B62D 13/06 (20130101); B60W 30/02 (20130101); B60W 50/14 (20130101); B60R 1/003 (20130101); H04N 7/181 (20130101); B60D 1/62 (20130101); B60W 30/00 (20130101); B60W 50/0097 (20130101); B60W 2300/14 (20130101); B60W 2540/215 (20200201); B60W 2050/146 (20130101); G01B 11/26 (20130101); B60R 2300/70 (20130101); B60W 2540/18 (20130101); B60W 2520/22 (20130101); G01B 7/30 (20130101); B60W 2050/143 (20130101); B60R 2300/808 (20130101) |
| Current International Class: | H04N 7/18 (20060101); B62D 13/06 (20060101); B60W 30/00 (20060101); B62D 15/02 (20060101); B60D 1/24 (20060101); B60D 1/62 (20060101); B60R 1/00 (20060101); G01B 11/26 (20060101); G01B 7/30 (20060101) |
References Cited [Referenced By]
U.S. Patent Documents
| 3605088 | September 1971 | Savelli |
| 3833928 | September 1974 | Gavit et al. |
| 3924257 | December 1975 | Roberts |
| 4044706 | August 1977 | Gill |
| 4277804 | July 1981 | Robison |
| 4430637 | February 1984 | Koch-Ducker et al. |
| 4846094 | July 1989 | Woods |
| 4848499 | July 1989 | Martinet et al. |
| 4897642 | January 1990 | DiLullo et al. |
| 4947097 | August 1990 | Tao |
| 5097250 | March 1992 | Hernandez |
| 5132851 | July 1992 | Bomar et al. |
| 5155683 | October 1992 | Rahim |
| 5191328 | March 1993 | Nelson |
| 5235316 | August 1993 | Qualizza |
| 5247442 | September 1993 | Kendall |
| 5455557 | October 1995 | Noll et al. |
| 5461357 | October 1995 | Yoshioka et al. |
| 5521633 | May 1996 | Nakajima et al. |
| 5650764 | July 1997 | McCullough |
| 5690347 | November 1997 | Juergens et al. |
| 5734336 | March 1998 | Smithline |
| 5781662 | July 1998 | Mori et al. |
| 5905433 | May 1999 | Wortham |
| 5947588 | September 1999 | Huang |
| 5951035 | September 1999 | Phillips, Jr. et al. |
| 5957232 | September 1999 | Shimizu et al. |
| 5999091 | December 1999 | Wortham |
| 6041582 | March 2000 | Tiede et al. |
| 6100795 | August 2000 | Otterbacher et al. |
| 6142372 | November 2000 | Wright |
| 6178650 | January 2001 | Thibodeaux |
| 6182010 | January 2001 | Berstis |
| 6198992 | March 2001 | Winslow |
| 6226226 | May 2001 | Lill et al. |
| 6318747 | November 2001 | Ratican |
| 6351698 | February 2002 | Kubota et al. |
| 6366202 | April 2002 | Rosenthal |
| 6411898 | June 2002 | Ishida et al. |
| 6434486 | August 2002 | Studt et al. |
| 6480104 | November 2002 | Wall et al. |
| 6483429 | November 2002 | Yasui et al. |
| 6526335 | February 2003 | Treyz et al. |
| 6539288 | March 2003 | Ishida et al. |
| 6573833 | June 2003 | Rosenthal |
| 6577952 | June 2003 | Geier et al. |
| 6580984 | June 2003 | Fecher et al. |
| 6587760 | July 2003 | Okamoto |
| 6593960 | July 2003 | Sugimoto et al. |
| 6604592 | August 2003 | Pietsch et al. |
| 6643576 | November 2003 | O Connor et al. |
| 6683539 | January 2004 | Trajkovic et al. |
| 6690413 | February 2004 | Moore |
| 6704653 | March 2004 | Kuriya et al. |
| 6801125 | October 2004 | McGregor et al. |
| 6816765 | November 2004 | Yamamoto et al. |
| 6837432 | January 2005 | Tsikos et al. |
| 6838979 | January 2005 | Deng et al. |
| 6847916 | January 2005 | Ying |
| 6854557 | February 2005 | Deng et al. |
| 6857494 | February 2005 | Kobayashi et al. |
| 6911997 | June 2005 | Okamoto |
| 6933837 | August 2005 | Gunderson et al. |
| 6959970 | November 2005 | Tseng |
| 6970184 | November 2005 | Hirama et al. |
| 6989739 | January 2006 | Li |
| 7005974 | February 2006 | McMahon et al. |
| 7006127 | February 2006 | Mizusawa et al. |
| 7026957 | April 2006 | Rubenstein |
| 7039504 | May 2006 | Tanaka et al. |
| 7047117 | May 2006 | Akiyama et al. |
| 7085634 | August 2006 | Endo et al. |
| 7089101 | August 2006 | Fischer et al. |
| 7136754 | November 2006 | Hahn et al. |
| 7142098 | November 2006 | Lang et al. |
| 7154385 | December 2006 | Lee et al. |
| 7161616 | January 2007 | Okamoto et al. |
| 7175194 | February 2007 | Ball |
| 7195267 | March 2007 | Thompson |
| 7204504 | April 2007 | Gehring et al. |
| 7207041 | April 2007 | Elson et al. |
| 7220217 | May 2007 | Tamai et al. |
| 7225891 | June 2007 | Gehring et al. |
| 7229139 | June 2007 | Lu et al. |
| 7237790 | July 2007 | Gehring et al. |
| 7239958 | July 2007 | Grougan et al. |
| 7248283 | July 2007 | Takagi et al. |
| 7266435 | September 2007 | Wang et al. |
| 7309075 | December 2007 | Ramsey et al. |
| 7319927 | January 2008 | Sun et al. |
| 7352388 | April 2008 | Miwa et al. |
| 7353110 | April 2008 | Kim |
| 7366892 | April 2008 | Spaur et al. |
| 7401871 | July 2008 | Lu et al. |
| 7425889 | September 2008 | Widmann et al. |
| 7451020 | November 2008 | Goetting et al. |
| 7463137 | December 2008 | Wishart et al. |
| 7505784 | March 2009 | Barbera |
| 7532109 | May 2009 | Takahama et al. |
| 7537256 | May 2009 | Gates et al. |
| 7552009 | June 2009 | Nelson |
| 7568716 | August 2009 | Dietz |
| 7602782 | October 2009 | Doviak et al. |
| 7619680 | November 2009 | Bingle et al. |
| 7623952 | November 2009 | Unruh et al. |
| 7640108 | December 2009 | Shimizu et al. |
| 7640180 | December 2009 | Shimizu et al. |
| 7658524 | February 2010 | Johnson et al. |
| 7688221 | March 2010 | Watanabe et al. |
| 7689253 | March 2010 | Basir |
| 7690737 | April 2010 | Lu |
| 7692557 | April 2010 | Medina et al. |
| 7693661 | April 2010 | Iwasaka |
| 7702133 | April 2010 | Muramatsu et al. |
| 7706944 | April 2010 | Tanaka et al. |
| 7715953 | May 2010 | Shepard |
| 7777615 | August 2010 | Okuda |
| 7783699 | August 2010 | Rasin et al. |
| 7786849 | August 2010 | Buckley |
| 7801941 | September 2010 | Conneely et al. |
| 7825782 | November 2010 | Hermann |
| 7827047 | November 2010 | Anderson et al. |
| 7840347 | November 2010 | Noguchi |
| 7904222 | March 2011 | Lee et al. |
| 7907975 | March 2011 | Sakamoto et al. |
| 7917081 | March 2011 | Voto et al. |
| 7932623 | April 2011 | Burlak et al. |
| 7932815 | April 2011 | Martinez et al. |
| 7950751 | May 2011 | Offerle et al. |
| 7969326 | June 2011 | Sakakibara |
| 7974444 | July 2011 | Hongo |
| 8009025 | August 2011 | Engstrom et al. |
| 8010252 | August 2011 | Getman et al. |
| 8019592 | September 2011 | Fukuoka et al. |
| 8024743 | September 2011 | Werner |
| 8033955 | October 2011 | FarNsworth |
| 8036792 | October 2011 | Dechamp |
| 8037500 | October 2011 | Margis et al. |
| 8038166 | October 2011 | Piesinger |
| 8044776 | October 2011 | Schofield et al. |
| 8044779 | October 2011 | Hahn et al. |
| 8068019 | November 2011 | Bennie et al. |
| 8121802 | February 2012 | Grider et al. |
| 8131458 | March 2012 | Zilka |
| 8138899 | March 2012 | Ghneim |
| 8139109 | March 2012 | Schmiedel et al. |
| 8140138 | March 2012 | Chrumka |
| 8150474 | April 2012 | Saito et al. |
| 8165770 | April 2012 | Getman et al. |
| 8169341 | May 2012 | Toledo et al. |
| 8174576 | May 2012 | Akatsuka et al. |
| 8179238 | May 2012 | Roberts, Sr. et al. |
| 8192064 | June 2012 | Johnson et al. |
| 8195145 | June 2012 | Angelhag |
| 8205704 | June 2012 | Kadowaki et al. |
| 8223204 | July 2012 | Hahn |
| 8224078 | July 2012 | Boncyk et al. |
| 8244442 | August 2012 | Craig et al. |
| 8245270 | August 2012 | Cooperstein et al. |
| 8255007 | August 2012 | Saito et al. |
| 8267485 | September 2012 | Barlsen et al. |
| 8270933 | September 2012 | Riemer et al. |
| 8280607 | October 2012 | Gatti et al. |
| 8289189 | October 2012 | Becker et al. |
| 8290657 | October 2012 | Lavoie |
| 8294563 | October 2012 | Shimoda et al. |
| 8308182 | November 2012 | Ortmann et al. |
| 8310353 | November 2012 | Hinninger et al. |
| 8315617 | November 2012 | Tadayon et al. |
| 8319614 | November 2012 | Takano |
| 8319618 | November 2012 | Gomi et al. |
| 8319663 | November 2012 | Von Reyher et al. |
| 8332097 | December 2012 | Chiba et al. |
| 8352575 | January 2013 | Samaha |
| 8362888 | January 2013 | Roberts, Sr. et al. |
| 8370056 | February 2013 | Trombley et al. |
| 8374749 | February 2013 | Tanaka |
| 8380416 | February 2013 | Offerle et al. |
| 8390696 | March 2013 | Komoto et al. |
| 8392066 | March 2013 | Ehara et al. |
| 8401744 | March 2013 | Chiocco |
| 8406956 | March 2013 | Wey et al. |
| 8414171 | April 2013 | Kawamura |
| 8417263 | April 2013 | Jenkins et al. |
| 8417417 | April 2013 | Chen et al. |
| 8417444 | April 2013 | Smid et al. |
| 8427288 | April 2013 | Schofield et al. |
| 8451107 | May 2013 | Lu et al. |
| 8469125 | June 2013 | Yu et al. |
| 8471691 | June 2013 | Zhang et al. |
| 8473575 | June 2013 | Marchwicki et al. |
| 8494439 | July 2013 | Faenger |
| 8498757 | July 2013 | Bowden et al. |
| 8498770 | July 2013 | Takano |
| 8508350 | August 2013 | Nix et al. |
| 8538785 | September 2013 | Coleman et al. |
| 8548680 | October 2013 | Ryerson et al. |
| 8560175 | October 2013 | Bammert et al. |
| 8571758 | October 2013 | Klier et al. |
| 8605153 | December 2013 | Sasaki et al. |
| 8626382 | January 2014 | Obradovich |
| 8645015 | February 2014 | Oetiker et al. |
| 8755984 | June 2014 | Rupp et al. |
| 8786417 | July 2014 | Holmen et al. |
| 8788204 | July 2014 | Shimizu |
| 8797190 | August 2014 | Kolbe et al. |
| 8798860 | August 2014 | Dechamp |
| 8807261 | August 2014 | Subrt et al. |
| 8811698 | August 2014 | Kono et al. |
| 8823796 | September 2014 | Shen et al. |
| 8825221 | September 2014 | Hueger et al. |
| 8825328 | September 2014 | Rupp et al. |
| 8836786 | September 2014 | Seger et al. |
| 8868329 | October 2014 | Ikeda et al. |
| 8888120 | November 2014 | Trevino |
| 8888121 | November 2014 | Trevino et al. |
| 8892360 | November 2014 | Otani |
| 8909426 | December 2014 | Rhode et al. |
| 8928757 | January 2015 | Maekawa et al. |
| 8930140 | January 2015 | Trombley et al. |
| 8957786 | February 2015 | Stempnik et al. |
| 8972109 | March 2015 | Lavoie et al. |
| 9008913 | April 2015 | Sears et al. |
| 9013286 | April 2015 | Chen et al. |
| 9042603 | May 2015 | Elwart et al. |
| 9082315 | July 2015 | Lin et al. |
| 9094583 | July 2015 | Shih et al. |
| 9102271 | August 2015 | Trombley et al. |
| 9108598 | August 2015 | Headley |
| 9114832 | August 2015 | Wang et al. |
| 9126525 | August 2015 | Lynam et al. |
| 9120359 | September 2015 | Chiu et al. |
| 9132856 | September 2015 | Shepard |
| 9156496 | October 2015 | Greenwood et al. |
| 9164955 | October 2015 | Lavoie et al. |
| 9208686 | December 2015 | Takamatsu |
| 9227474 | January 2016 | Liu |
| 9238483 | January 2016 | Hafner et al. |
| 9248858 | February 2016 | Lavoie et al. |
| 9264672 | February 2016 | Lynam |
| 9296422 | March 2016 | Lavoie |
| 9315151 | April 2016 | Taylor et al. |
| 9315212 | April 2016 | Kyrtsos et al. |
| 9321483 | April 2016 | Headley |
| 9335162 | May 2016 | Kyrtsos et al. |
| 9340228 | May 2016 | Xu et al. |
| 9352777 | May 2016 | Lavoie et al. |
| 9400897 | July 2016 | Bruening et al. |
| 9428188 | August 2016 | Schwindt et al. |
| 9434414 | September 2016 | Lavoie |
| 9464913 | October 2016 | Brown et al. |
| 9499018 | November 2016 | Gehrke et al. |
| 9499168 | November 2016 | Watanabe et al. |
| 9500497 | November 2016 | Lavoie et al. |
| 9508189 | November 2016 | Han et al. |
| 9520063 | December 2016 | Noh |
| 9558409 | January 2017 | Pliefke et al. |
| 9616923 | April 2017 | Lavoie et al. |
| 9623904 | April 2017 | Lavoie et al. |
| 9633566 | April 2017 | Skvarce |
| 9676377 | June 2017 | Hafner et al. |
| 9827818 | November 2017 | Hu et al. |
| 9834049 | December 2017 | Strand |
| 9836060 | December 2017 | Ghneim et al. |
| 9840278 | December 2017 | Lavoie et al. |
| 10046800 | August 2018 | Hu et al. |
| 2002/0005780 | January 2002 | Ehrlich et al. |
| 2002/0098853 | July 2002 | Chrumka |
| 2002/0111118 | August 2002 | Klitsner et al. |
| 2003/0079123 | April 2003 | Mas Ribes |
| 2003/0147534 | August 2003 | Ablay et al. |
| 2003/0222982 | December 2003 | Hamdan et al. |
| 2003/0234512 | December 2003 | Holub |
| 2003/0236618 | December 2003 | Kamikawa |
| 2004/0119822 | June 2004 | Custer et al. |
| 2004/0203660 | October 2004 | Tibrewal et al. |
| 2004/0207525 | October 2004 | Wholey et al. |
| 2004/0260438 | December 2004 | Chernetsky et al. |
| 2005/0000738 | January 2005 | Gehring et al. |
| 2005/0046696 | March 2005 | Lang et al. |
| 2005/0073433 | April 2005 | Gunderson et al. |
| 2005/0074143 | April 2005 | Kawai |
| 2005/0091408 | April 2005 | Parupudi et al. |
| 2005/0128059 | June 2005 | Vause |
| 2005/0146607 | July 2005 | Linn |
| 2005/0168331 | August 2005 | Gunderson |
| 2005/0177635 | August 2005 | Schmidt et al. |
| 2005/0206225 | September 2005 | Offerle et al. |
| 2005/0206231 | September 2005 | Lu et al. |
| 2005/0206299 | September 2005 | Nakamura et al. |
| 2005/0236201 | October 2005 | Spannheimer et al. |
| 2005/0236896 | October 2005 | Offerle et al. |
| 2005/0261826 | November 2005 | Kurosawa |
| 2006/0071447 | April 2006 | Gehring et al. |
| 2006/0076828 | April 2006 | Lu et al. |
| 2006/0092129 | May 2006 | Choquet et al. |
| 2006/0103511 | May 2006 | Lee et al. |
| 2006/0111820 | May 2006 | Goetting et al. |
| 2006/0142936 | June 2006 | Dix |
| 2006/0155455 | July 2006 | Lucas et al. |
| 2006/0156315 | July 2006 | Wood et al. |
| 2006/0171704 | August 2006 | Bingle et al. |
| 2006/0176370 | August 2006 | Chen et al. |
| 2006/0190097 | August 2006 | Rubenstein |
| 2006/0190147 | August 2006 | Lee et al. |
| 2006/0238538 | October 2006 | Kapler et al. |
| 2006/0244579 | November 2006 | Raab |
| 2006/0250501 | November 2006 | Widmann et al. |
| 2006/0276959 | December 2006 | Matsuoka et al. |
| 2006/0287821 | December 2006 | Lin |
| 2006/0293800 | December 2006 | Bauer et al. |
| 2007/0019421 | January 2007 | Kregness et al. |
| 2007/0027581 | February 2007 | Bauer et al. |
| 2007/0057816 | March 2007 | Sakakibara |
| 2007/0058273 | March 2007 | Ito et al. |
| 2007/0132560 | June 2007 | Nystrom et al. |
| 2007/0132573 | June 2007 | Quach et al. |
| 2007/0182820 | August 2007 | Wang |
| 2007/0198190 | August 2007 | Bauer et al. |
| 2007/0216136 | September 2007 | Dietz |
| 2007/0260395 | November 2007 | Matsuoka et al. |
| 2007/0279250 | December 2007 | Kume |
| 2008/0027599 | January 2008 | Logan et al. |
| 2008/0027635 | January 2008 | Tengler et al. |
| 2008/0044061 | February 2008 | Hongo |
| 2008/0147277 | June 2008 | Lu et al. |
| 2008/0148374 | June 2008 | Spaur et al. |
| 2008/0177443 | July 2008 | Lee et al. |
| 2008/0180526 | July 2008 | Trevino |
| 2008/0186384 | August 2008 | Ishii et al. |
| 2008/0231701 | September 2008 | Greenwood et al. |
| 2008/0312792 | December 2008 | Dechamp |
| 2008/0313050 | December 2008 | Basir |
| 2009/0005932 | January 2009 | Lee et al. |
| 2009/0045924 | February 2009 | Roberts, Sr. et al. |
| 2009/0063053 | March 2009 | Basson et al. |
| 2009/0075624 | March 2009 | Cox et al. |
| 2009/0079828 | March 2009 | Lee et al. |
| 2009/0082935 | March 2009 | Leschuk et al. |
| 2009/0085775 | April 2009 | Otsuka et al. |
| 2009/0093928 | April 2009 | Getman et al. |
| 2009/0106036 | April 2009 | Tamura et al. |
| 2009/0117890 | May 2009 | Jacobsen et al. |
| 2009/0140064 | June 2009 | Schultz et al. |
| 2009/0140881 | June 2009 | Sakai |
| 2009/0153663 | June 2009 | Ramos |
| 2009/0219147 | September 2009 | Bradley et al. |
| 2009/0231441 | September 2009 | Walker et al. |
| 2009/0253466 | October 2009 | Saito et al. |
| 2009/0271078 | October 2009 | Dickinson |
| 2009/0300701 | December 2009 | Karaoguz et al. |
| 2009/0306854 | December 2009 | Dechamp |
| 2009/0318119 | December 2009 | Basir et al. |
| 2010/0039722 | February 2010 | Lee et al. |
| 2010/0060739 | March 2010 | Salazar |
| 2010/0063670 | March 2010 | Brzezinski et al. |
| 2010/0098853 | April 2010 | Hoffmann et al. |
| 2010/0114471 | May 2010 | Sugiyama et al. |
| 2010/0152989 | June 2010 | Smith et al. |
| 2010/0156667 | June 2010 | Bennie et al. |
| 2010/0156671 | June 2010 | Lee et al. |
| 2010/0157061 | June 2010 | Katsman et al. |
| 2010/0171828 | July 2010 | Ishii |
| 2010/0174422 | July 2010 | Jacobsen et al. |
| 2010/0191421 | July 2010 | Nilsson |
| 2010/0194888 | August 2010 | McElroy et al. |
| 2010/0198491 | August 2010 | Mays |
| 2010/0222964 | September 2010 | Dechamp |
| 2010/0234071 | September 2010 | Shabtay et al. |
| 2010/0305815 | December 2010 | Trueman et al. |
| 2010/0306309 | December 2010 | Santori et al. |
| 2010/0324770 | December 2010 | Ramsey et al. |
| 2011/0001825 | January 2011 | Hahn |
| 2011/0022282 | January 2011 | Wu et al. |
| 2011/0025482 | February 2011 | Alguera et al. |
| 2011/0050903 | March 2011 | Vorobiev |
| 2011/0063425 | March 2011 | Tieman |
| 2011/0088659 | April 2011 | Wang et al. |
| 2011/0102583 | May 2011 | Kinzalow |
| 2011/0110530 | May 2011 | Kimura |
| 2011/0112721 | May 2011 | Wang et al. |
| 2011/0112762 | May 2011 | Gruijters et al. |
| 2011/0125457 | May 2011 | Lee et al. |
| 2011/0129093 | June 2011 | Karam et al. |
| 2011/0140872 | June 2011 | McClure |
| 2011/0149077 | June 2011 | Robert |
| 2011/0153136 | June 2011 | Anderson |
| 2011/0153198 | June 2011 | Kokkas et al. |
| 2011/0157361 | June 2011 | Wu et al. |
| 2011/0160956 | June 2011 | Chung et al. |
| 2011/0175752 | July 2011 | Augst |
| 2011/0181457 | July 2011 | Basten |
| 2011/0185390 | July 2011 | Faenger et al. |
| 2011/0195659 | August 2011 | Boll et al. |
| 2011/0216199 | September 2011 | Trevino et al. |
| 2011/0257860 | October 2011 | Getman et al. |
| 2011/0281522 | November 2011 | Suda |
| 2011/0296037 | December 2011 | Westra et al. |
| 2012/0004805 | January 2012 | Gray et al. |
| 2012/0039537 | February 2012 | Keys |
| 2012/0062743 | March 2012 | Lynam et al. |
| 2012/0062744 | March 2012 | Schofield et al. |
| 2012/0065815 | March 2012 | Hess |
| 2012/0079002 | March 2012 | Boll et al. |
| 2012/0084292 | April 2012 | Liang et al. |
| 2012/0086808 | April 2012 | Lynam |
| 2012/0087546 | April 2012 | Focke |
| 2012/0095649 | April 2012 | Klier et al. |
| 2012/0170286 | July 2012 | Bodem et al. |
| 2012/0185131 | July 2012 | Headley |
| 2012/0191285 | July 2012 | Woolf et al. |
| 2012/0200706 | August 2012 | Greenwood et al. |
| 2012/0212616 | August 2012 | Usami et al. |
| 2012/0218412 | August 2012 | Dellantoni |
| 2012/0221168 | August 2012 | Zeng et al. |
| 2012/0224059 | September 2012 | Takamatsu |
| 2012/0229596 | September 2012 | Rose et al. |
| 2012/0229639 | September 2012 | Singleton |
| 2012/0249791 | October 2012 | Shen et al. |
| 2012/0265416 | October 2012 | Lu et al. |
| 2012/0271512 | October 2012 | Rupp et al. |
| 2012/0271514 | October 2012 | Lavoie et al. |
| 2012/0271515 | October 2012 | Rhode et al. |
| 2012/0271522 | October 2012 | Rupp et al. |
| 2012/0283909 | November 2012 | Dix |
| 2012/0283910 | November 2012 | Lee et al. |
| 2012/0288156 | November 2012 | Kido |
| 2012/0290150 | November 2012 | Doughty et al. |
| 2012/0314073 | December 2012 | Shimoda et al. |
| 2012/0316732 | December 2012 | Auer |
| 2013/0006472 | January 2013 | McClain et al. |
| 2013/0024064 | January 2013 | Shepard |
| 2013/0027195 | January 2013 | Van Wiemeersch et al. |
| 2013/0038436 | February 2013 | Brey et al. |
| 2013/0038731 | February 2013 | Brey et al. |
| 2013/0041524 | February 2013 | Brey |
| 2013/0057397 | March 2013 | Cutler |
| 2013/0076007 | March 2013 | Goode |
| 2013/0120161 | May 2013 | Wakabayashi et al. |
| 2013/0120572 | May 2013 | Kwon |
| 2013/0128047 | May 2013 | Lee |
| 2013/0148748 | June 2013 | Suda |
| 2013/0158803 | June 2013 | Headley |
| 2013/0158863 | June 2013 | Skvarce et al. |
| 2013/0179038 | July 2013 | Goswami |
| 2013/0226390 | August 2013 | Luo et al. |
| 2013/0229524 | September 2013 | Vovkushevsky et al. |
| 2013/0250114 | September 2013 | Lu |
| 2013/0253814 | September 2013 | Wirthlin |
| 2013/0268160 | October 2013 | Trombley et al. |
| 2013/0329005 | December 2013 | Shih et al. |
| 2014/0005918 | January 2014 | Qiang |
| 2014/0012465 | January 2014 | Shank et al. |
| 2014/0022389 | January 2014 | Kageta |
| 2014/0025260 | January 2014 | McClure |
| 2014/0052337 | February 2014 | Lavoie et al. |
| 2014/0058614 | February 2014 | Trombley et al. |
| 2014/0058622 | February 2014 | Trombley et al. |
| 2014/0058655 | February 2014 | Trombley et al. |
| 2014/0058668 | February 2014 | Trombley et al. |
| 2014/0071279 | March 2014 | Mokashi |
| 2014/0074743 | March 2014 | Rademaker |
| 2014/0085472 | March 2014 | Lu |
| 2014/0088797 | March 2014 | McClain et al. |
| 2014/0088824 | March 2014 | Ishimoto |
| 2014/0121883 | May 2014 | Shen et al. |
| 2014/0121930 | May 2014 | Allexi et al. |
| 2014/0125795 | May 2014 | Yerke |
| 2014/0156148 | June 2014 | Kikuchi |
| 2014/0160276 | June 2014 | Pliefke et al. |
| 2014/0168243 | June 2014 | Huang |
| 2014/0168415 | June 2014 | Ihlenburg et al. |
| 2014/0172232 | June 2014 | Rupp et al. |
| 2014/0188344 | July 2014 | Lavoie |
| 2014/0188346 | July 2014 | Lavoie |
| 2014/0200759 | July 2014 | Lu |
| 2014/0210456 | July 2014 | Crossman |
| 2014/0218506 | August 2014 | Trombley et al. |
| 2014/0218522 | August 2014 | Lavoie et al. |
| 2014/0222288 | August 2014 | Lavoie et al. |
| 2014/0236532 | August 2014 | Trombley et al. |
| 2014/0249691 | September 2014 | Hafner et al. |
| 2014/0267688 | September 2014 | Aich et al. |
| 2014/0267689 | September 2014 | Lavoie |
| 2014/0267727 | September 2014 | Alaniz |
| 2014/0277941 | September 2014 | Chiu et al. |
| 2014/0277942 | September 2014 | Kyrtsos et al. |
| 2014/0297128 | October 2014 | Lavoie et al. |
| 2014/0297129 | October 2014 | Lavoie et al. |
| 2014/0303847 | October 2014 | Lavoie |
| 2014/0307095 | October 2014 | Wierich |
| 2014/0309888 | October 2014 | Snit et al. |
| 2014/0313335 | October 2014 | Koravadi |
| 2014/0324295 | October 2014 | Lavoie |
| 2014/0333729 | November 2014 | Pflug |
| 2014/0343795 | November 2014 | Lavoie |
| 2014/0354811 | December 2014 | Weber |
| 2014/0358429 | December 2014 | Shutko et al. |
| 2014/0361955 | December 2014 | Goncalves |
| 2014/0379217 | December 2014 | Rupp et al. |
| 2015/0002669 | January 2015 | Reed et al. |
| 2015/0002670 | January 2015 | Bajpai |
| 2015/0057903 | February 2015 | Rhode et al. |
| 2015/0066296 | March 2015 | Trombley et al. |
| 2015/0077557 | March 2015 | Han et al. |
| 2015/0094945 | April 2015 | Cheng et al. |
| 2015/0115571 | April 2015 | Zhang et al. |
| 2015/0120141 | April 2015 | Lavoie et al. |
| 2015/0120143 | April 2015 | Schlichting |
| 2015/0134183 | May 2015 | Lavoie et al. |
| 2015/0138340 | May 2015 | Lavioe |
| 2015/0142211 | May 2015 | Shehata et al. |
| 2015/0149040 | May 2015 | Hueger et al. |
| 2015/0158527 | June 2015 | Hafner et al. |
| 2015/0165850 | June 2015 | Chiu et al. |
| 2015/0172582 | June 2015 | Kiyohara et al. |
| 2015/0179075 | June 2015 | Lee |
| 2015/0191200 | July 2015 | Tsubaki et al. |
| 2015/0197278 | July 2015 | Boos et al. |
| 2015/0198949 | July 2015 | Boos et al. |
| 2015/0203156 | July 2015 | Hafner et al. |
| 2015/0210317 | July 2015 | Hafner et al. |
| 2015/0217692 | August 2015 | Yanagawa |
| 2015/0217693 | August 2015 | Pliefke et al. |
| 2015/0232031 | August 2015 | Kitaura et al. |
| 2015/0232092 | August 2015 | Fairgrieve et al. |
| 2015/0234386 | August 2015 | Zini et al. |
| 2015/0235484 | August 2015 | Kraeling et al. |
| 2015/0251602 | September 2015 | Baur et al. |
| 2015/0269444 | September 2015 | Lameyre et al. |
| 2015/0344028 | December 2015 | Gieseke et al. |
| 2015/0369613 | December 2015 | Stadler |
| 2016/0001705 | January 2016 | Greenwood et al. |
| 2016/0006922 | January 2016 | Boudreau et al. |
| 2016/0023601 | January 2016 | Windeler |
| 2016/0023603 | January 2016 | Vico et al. |
| 2016/0039456 | February 2016 | Lavoie et al. |
| 2016/0052548 | February 2016 | Singh et al. |
| 2016/0059780 | March 2016 | Lavoie |
| 2016/0059888 | March 2016 | Bradley |
| 2016/0059889 | March 2016 | Herzog et al. |
| 2016/0096549 | April 2016 | Herzog et al. |
| 2016/0109940 | April 2016 | Lyren |
| 2016/0129939 | May 2016 | Singh et al. |
| 2016/0152263 | June 2016 | Singh |
| 2016/0153778 | June 2016 | Singh et al. |
| 2016/0207526 | July 2016 | Franz et al. |
| 2016/0272024 | September 2016 | Bochenek et al. |
| 2016/0280267 | September 2016 | Lavoie et al. |
| 2016/0304088 | October 2016 | Barth |
| 2016/0304122 | October 2016 | Herzog et al. |
| 2016/0320477 | November 2016 | Heimberger |
| 2016/0375831 | December 2016 | Wang et al. |
| 2017/0073005 | March 2017 | Ghneim et al. |
| 2017/0101130 | April 2017 | Lavoie |
| 2017/0124378 | May 2017 | High |
| 2017/0174130 | June 2017 | Hu et al. |
| 2017/0259850 | September 2017 | Yamashita et al. |
| 2017/0280091 | September 2017 | Greenwood |
| 2017/0297619 | October 2017 | Lavoie et al. |
| 2017/0297620 | October 2017 | Lavoie et al. |
| 2017/0313351 | November 2017 | Lavoie |
| 2018/0220081 | August 2018 | Lewis |
| 2018/0220082 | August 2018 | Lewis |
| 2019/0052842 | February 2019 | Du |
| 2019/0096125 | March 2019 | Schulter |
| 2019/0126851 | May 2019 | Greenwood |
| 101610420 | Dec 2009 | CN | |||
| 101833869 | Sep 2010 | CN | |||
| 201923085 | Aug 2011 | CN | |||
| 202541524 | Nov 2012 | CN | |||
| 102582686 | Sep 2013 | CN | |||
| 203292137 | Nov 2013 | CN | |||
| 3931518 | Apr 1991 | DE | |||
| 9208595 | Aug 1992 | DE | |||
| 19526702 | Feb 1997 | DE | |||
| 10065230 | Jul 2002 | DE | |||
| 10154612 | May 2003 | DE | |||
| 102005043466 | Mar 2007 | DE | |||
| 102005043467 | Mar 2007 | DE | |||
| 102005043468 | Mar 2007 | DE | |||
| 102006035021 | Jan 2008 | DE | |||
| 102006048947 | Apr 2008 | DE | |||
| 102008020838 | Nov 2008 | DE | |||
| 102008045436 | Mar 2010 | DE | |||
| 102006035021 | Apr 2010 | DE | |||
| 102009012253 | Sep 2010 | DE | |||
| 102010004920 | Jul 2011 | DE | |||
| 102010006323 | Aug 2011 | DE | |||
| 102008004158 | Oct 2011 | DE | |||
| 102008004159 | Oct 2011 | DE | |||
| 102008004160 | Oct 2011 | DE | |||
| 102010021052 | Nov 2011 | DE | |||
| 102011104256 | Jul 2012 | DE | |||
| 102011101990 | Oct 2012 | DE | |||
| 102012005707 | Oct 2012 | DE | |||
| 102011108440 | Jan 2013 | DE | |||
| 102011120814 | Jun 2013 | DE | |||
| 102012019234 | Apr 2014 | DE | |||
| 0418653 | Mar 1991 | EP | |||
| 0849144 | Jun 1998 | EP | |||
| 1245445 | Oct 2002 | EP | |||
| 1361543 | Nov 2003 | EP | |||
| 1442931 | Aug 2004 | EP | |||
| 1695888 | Aug 2006 | EP | |||
| 1593552 | Mar 2007 | EP | |||
| 2168815 | Mar 2010 | EP | |||
| 2199188 | Jun 2010 | EP | |||
| 2431225 | Mar 2012 | EP | |||
| 2452549 | May 2012 | EP | |||
| 2551132 | Jan 2013 | EP | |||
| 2644477 | Oct 2013 | EP | |||
| 2682329 | Jan 2014 | EP | |||
| 1569073 | Sep 2014 | EP | |||
| 2803944 | Nov 2014 | EP | |||
| 2515379 | Oct 1981 | FR | |||
| 2606717 | May 1988 | FR | |||
| 2716145 | Aug 1995 | FR | |||
| 2786456 | Jun 2000 | FR | |||
| 2980750 | Apr 2013 | FR | |||
| 2265587 | Oct 1993 | GB | |||
| 2342630 | Apr 2000 | GB | |||
| 2398048 | Aug 2004 | GB | |||
| 2398049 | Aug 2004 | GB | |||
| 2398050 | Aug 2004 | GB | |||
| 63-085568 | Jun 1988 | JP | |||
| 06-028598 | Apr 1994 | JP | |||
| 08289286 | Nov 1996 | JP | |||
| 2000267181 | Sep 2000 | JP | |||
| 2002012172 | Jan 2002 | JP | |||
| 2002068032 | Mar 2002 | JP | |||
| 2003148938 | May 2003 | JP | |||
| 2003175852 | Jun 2003 | JP | |||
| 2004114879 | Apr 2004 | JP | |||
| 3716722 | Nov 2005 | JP | |||
| 2008027138 | Feb 2008 | JP | |||
| 2008123028 | May 2008 | JP | |||
| 2009171122 | Jul 2009 | JP | |||
| 2012105158 | May 2012 | JP | |||
| 2012166647 | Sep 2012 | JP | |||
| 2014002056 | Jan 2014 | JP | |||
| 2014034289 | Feb 2014 | JP | |||
| 20060012710 | Feb 2006 | KR | |||
| 1020060012710 | Feb 2006 | KR | |||
| 20060133750 | Dec 2006 | KR | |||
| 1020070034729 | Mar 2007 | KR | |||
| 20110114897 | Oct 2011 | KR | |||
| 20140105199 | Sep 2014 | KR | |||
| 200930010 | Jul 2009 | TW | |||
| 8503263 | Aug 1985 | WO | |||
| 0044605 | Aug 2000 | WO | |||
| 2011117372 | Sep 2011 | WO | |||
| 2012103193 | Aug 2012 | WO | |||
| 2013048994 | Apr 2013 | WO | |||
| 2013070539 | May 2013 | WO | |||
| 2013081984 | Jun 2013 | WO | |||
| 2014006500 | Jan 2014 | WO | |||
| 2014019730 | Feb 2014 | WO | |||
| 2014037500 | Mar 2014 | WO | |||
| 2014123575 | Aug 2014 | WO | |||
| 2014174027 | Oct 2014 | WO | |||
| 2015074027 | May 2015 | WO | |||
Other References
|
Sh.Azadi et al., Automatic Parking of an Articulated Vehicle Using ANFIS, Global Journal of Science, Engineering and Technology, GJSET Publishing, 2013, Issue 14, 2013, pp. 93-104. cited by applicant . Jung-Hoon Hwang, Ronald C. Arkin, and Dong-Soo Kwon; "Mobile robots at your fingertip: Bezier curve on-line trajectory generation for supervisory control," IEEE/RSJ, International Conference on Intelligent Robots and Systems, Las Vegas, Nevada, Oct. 2003, 6 pages. cited by applicant . M. Khatib, H. Jaouni, R. Chatila, and J.P. Laumond; "Dynamic Path Modification for Car-Like Nonholonomic Mobile Robots," IEEE, International Conference on Robotics and Automation, Albuquerque, New Mexico, Apr. 1997, 6 pages. cited by applicant . Microsoft, Navigation System, Sync Powered by Microsoft, Ford Motor Company, Jul. 2009,196 pgs. cited by applicant . Kristopher Bunker, "2012 Guide to Towing", Trailer Life, 2012, pp. 1-42. cited by applicant . "iBall Wireless Trailer Hitch Camera", Product Listing, Amazon, Nov. 2, 2010, pp. 1-5. cited by applicant . M. Wagner, D. Zoebel, and A. Meroth, "An Adaptive Software and Systems Architecture for Driver Assistance Systems Based on Service Orientation" International Journal of Machine Learning and Computing, Oct. 2011, vol. 1, No. 4, pp. 359-365. cited by applicant . "Surround View System", ASL--Vision 360, 2010, pp. 1. cited by applicant . Jae Il Roh, Hyunsuk Lee, Woojin Chung, "Control of a Car with a Trailer Using the Driver Assistance System", IEEE, International Conference on Robotics and Biomimetics, Dec. 7-11, 2011; Phuket, Thailand, pp. 2890-2895. cited by applicant . Young Jin Lee, Sung Won Park, Hyeun Cheol Cho, Dong Seop Han, Geun Jo Han, and Kwon Soon Lee; "Development of Auto Alignment System Between Trailer and Freight Wagon Using Electronic Sensors for Intermodal Transportation" IEEE, 2010, pp. 1211-1215. cited by applicant . Michael Paine, "Heavy Vehicle Object Detection Systems", Vehicle Design and Research Pty Lmited for VicRoads, Jun. 2003, pp. 1-22. cited by applicant . Dougloas Newcomb, "Range Rover Evoque's Surround Camera System", Tech Feature Friday, Article, Jun. 15, 2012, pp. 1-2. cited by applicant . Laszlo Palkovics, Pal Michelberger, Jozsef Bokor, Peter Gaspar, "Adaptive Identification for Heavy-Truck Stability Control", Vehicle Systems Dynamics Supplement, vol. 25, No. sup1, 1996, pp. 502-518. cited by applicant . "Convenience and Loadspace Features" Jaguar Land Rover Limited, 2012, pp. 1-15, http://www.landrover.com/us/en/lr/all-new-range-rover/explore/. cited by applicant . "Rearview Parking Assist Systems", Donmar Sunroofs & Accessories, Brochure, Aug. 2013, pp. 1-13. cited by applicant . "Alpine Electronics Introduces Two New Drive Assist Solutions", Alpine Electronics of America, Inc., Jan. 7, 2010, pp. 1-2. cited by applicant . Jesus Morales, Anthony Mandow, Jorge L Martinez, and Alfonso Garcia-Cerezo, "Driver Assistance System for Backward Maneuvers in Passive Multi-trailer Vehicles", International Conference on Intelligent Robots and Systems (IROS), Oct. 7-12, 2012, pp. 4853-4858. cited by applicant . Nusser, Rene; Pelz, Rodolfo Mann, "Bluetooth-based Wireless Connectivity in an Automotive Environment", VTC, 2000, pp. 1935-1942. cited by applicant . Whitfield, Kermit, "A Hitchhiker's Guide to the Telematics Ecosystem", Automotive Design & Production, Oct. 1, 2003, 3 pgs. cited by applicant . Narasimhan, N.; Janssen, C.; Pearce, M.; Song, Y., "A Lightweight Remote Display Management Protocol for Mobile Devices", 2007, IEEE, pp. 711-715. cited by applicant . Microsoft, Navigation System, Sync Powered by Microsoft, Ford Motor Company, Jul. 2007, 164 pgs. cited by applicant . Microsoft, Supplemental Guide, Sync Powered by Microsoft, Ford Motor Company, Nov. 2007, 86 pgs. cited by applicant . Voelcker, J., "Top 10 Tech Cars: It's the Environment, Stupid", IEEE Spectrum, Apr. 2008, pp. 26-35. cited by applicant . Microsoft, Navigation System, Sync Powered by Microsoft, Ford Motor Company, Oct. 2008, 194 pgs. cited by applicant . Microsoft, Supplemental Guide, Sync Powered by Microsoft, Ford Motor Company, Oct. 2008, 83 pgs. cited by applicant . Chantry, Darryl, "Mapping Applications to the Cloud", Microsoft Corporation, Jan. 2009, 20 pgs. cited by applicant . Yarden, Raam; Surage Jr., Chris; Kim, Chong Il; Doboli, Alex; Voisan, Emil; Purcaru, Constantin, "Tuki: A Voice-Activated Information Browser", 2009, IEEE, pp. 1-5. cited by applicant . Gil-Castineira, Felipe; Chaves-Dieguez, David; Gonzalez-Castano, Francisco J., "Integration of Nomadic Devices with Automotive User Interfaces", IEEE Transactions on Consumer Electronics, Feb. 2009, vol. 55, Issue 1, pp. 34-41. cited by applicant . Microsoft, Supplemental Guide, Sync Powered by Microsoft, Ford Motor Company, Aug. 2009, 87 pgs. cited by applicant . Goodwin, Antuan, "Ford Unveils Open-Source Sync Developer Platform", The Car Tech Blog, Oct. 29, 2009, 5 pgs. [Retrieved from http://reviews.cnet.com/8301-13746_7-10385619-48.html on Feb. 15, 2011]. cited by applicant . Lamberti, Ralf, "Full Circle: The Rise of Vehicle-Installed Telematics",Telematics Munich, Nov. 10, 2009, 12 pgs. cited by applicant . "Apple Files Patent Which Could Allow You to Control Your Computer Remotely Using iPhone", Dec. 18, 2009, 7 pgs [Retrieved from www.iphonehacks.com on Jun. 22, 2010]. cited by applicant . Newmark, Zack, "Student develop in-car cloud computing apps; envision the future of in-car connectivity", May 4, 2010, 3 pgs [Retrieved from www.worldcarfans.com on Jun. 18, 2010]. cited by applicant . "Service Discovery Protocol (SDP)", Palo Wireless Bluetooth Resource Center, 7 pgs [Retrieved from http://palowireless.com/infotooth/tutorial/sdp.asp on Aug. 3, 2010]. cited by applicant . Sonnenberg, Jan, "Service and User Interface Transfer from Nomadic Devices to Car Infotainment Systems", Second International Conference on Automotive User Interfaces and Interactive Vehicular Applications (Automotive UI), Nov. 11-12, 2010, pp. 162-165. cited by applicant . "MobileSafer makes it easy to keep connected and safe", ZoomSafer Inc., 2010, 5 pgs. [Retrieved from http://zoomsafer.com/products/mobilesafer on Dec. 28, 2010]. cited by applicant . "PhonEnforcer FAQs", Turnoffthecellphone.com, 3 pgs. [Retrieved from http://turnoffthecellphone.com/faq.html on Dec. 28, 2010]. cited by applicant . "How PhonEnforcer Works", Turnoffthecellphone.com, 2 pgs. [Retrieved from http://turnoffthecellphone.com/howitworks.htm on Dec. 28, 2010]. cited by applicant . European Patent Office, European Search Report for Application No. EP11151623, dated Feb. 15, 2011, 7 pgs. cited by applicant . "Ford Super Duty: Truck Technology", Brochure, www.media.ford.com, Sep. 2011, pp. 1-2. cited by applicant . "Ford Guide to Towing", Trailer Life, Magazine, 2012, pp. 1-38. cited by applicant . M. Wagner, D. Zoebel, and A. Meroth, "Adaptive Software and Systems Architecture for Driver Assistance Systems" International Journal of Machine Learning and Computing, Oct. 2011, vol. 1, No. 4, pp. 359-365. cited by applicant . Christian Lundquist, Wolfgang Reinelt, Olof Enqvist, "Back Driving Assistant for Passenger Cars with Trailer", SAE Int'l, ZF Lenksysteme Gmbh, Schwaebisch Gmuend, Germany, 2006, pp. 1-8. cited by applicant . "Understanding Tractor-Trailer Performance", Caterpillar, 2006, pp. 1-28. cited by applicant . Divelbiss, A.W.; Wen, J.T.; "Trajectory Tracking Control of a Car-Trailer System", IEEE, Control Systems Technology, Aug. 6, 2002, vol. 5, No. 3, ISSN: 1063-6536, pp. 269-278. cited by applicant . Stahn, R.; Heiserich, G.; Stopp, A., "Laser Scanner-Based Navigation for Commercial Vehicles", IEEE, Intelligent Vehicles Symposium, Jun. 2007, pp. 969-974, print ISBN: 1931-0587. cited by applicant . Widrow, B.; Lamego, M.M., "Neurointerfaces: Applications", IEEE, Adaptive Systems for Signal Processing, Communications, and Control Symposium, Oct. 2000, pp. 441-444. cited by applicant . Stephen K. Young, Carol A. Eberhard, Philip J. Moffa, "Development of Performance Specifications for Collision Avoidance Systems for Lane Change, Merging and Backing", TRW Space and Electronics Group, Feb. 1995, pp. 1-31. cited by applicant . Claudio Altafini, Alberto Speranzon, and Karl Henrik Johansson, "Hybrid Control of a Truck and Trailer Vehicle", Springer-Verlag Berlin Heidelberg, HSCC 2002, LNCS 2289; 2002, pp. 21-34. cited by applicant . "2012 Edge--Trailer Towing Selector", Brochure, Preliminary 2012 RV & Trailer Towing Guide Information, pp. 1-3. cited by applicant . "Meritor Wabco Reverse Detection Module for Trailers with 12-Volt Constant Power Systems", Technical Bulletin, TP-02172, Revised Oct. 2004, pp. 1-8. cited by applicant . Simonoff, Adam J., "USH0001469 Remotely Piloted Vehicle Control and Interface System", Aug. 1, 1995, pp. 1-7. cited by applicant . "Range Rover Evoque's Surround Camera System"; MSN Douglas Newcomb Jun. 15, 2012, pp. 1-2. cited by applicant . "Electronic Trailer Steering", VSE, Advanced Steering & Suspension Solutions, Brochure, 2009, The Netherlands, pp. 1-28. cited by applicant . "WABCO Electronic Braking System--New Generation", Vehicle Control Systems--An American Standard Company, www.wabco-auto.com, 2004, pp. 1-8. cited by applicant . T. Wang, "Reverse-A-Matic-Wheel Direction Sensor System Operation and Installation Manual", Dec. 15, 2005, pp. 1-9. cited by applicant . "Wireless-Enabled Microphone, Speaker and User Interface for a Vehicle", The IP.com, Aug. 26, 2004, pp. 1-5, IP.com disclosure No. IPCOM000030782D. cited by applicant . "RFID Read/Write Module", Grand Idea Studio, 2013, pp. 1-3, website, http://www.grandideastudio.com/portfolio/rfid-read-write-module/. cited by applicant . "Telematics Past, Present, and Future," Automotive Service Association, www.ASAshop.org, May 2008, 20 pgs. cited by applicant . Niarasimhan, N.; Janssen, C.; Pearce, M.; Song, Y., "A Lightweight Remote Display Management Protocol for Mobile Devices", 2007, IEEE, pp. 711-715. cited by applicant . Back-up Buddy "Back-up and Utility Light System for Trucks and ATVs/UTVs" www.back-upbuddy.com website print, 3 pages, Sep. 25, 2019. cited by applicant . Ford Motor Company "09 F-150" Brochure, 30 pages, 2009. cited by applicant . "Implementation of Active Steering on a Multiple Trailer Long Combination Vehicle" Article by Odhams et al. of Cambridge University Engineering Department, 13 pages, 2010. cited by applicant . "Trailer Vision" Brochure by Trailer Vision Ltd., 4 pages, 2013. cited by applicant . "Shared Control Between Human and Machine: Using a Haptic Steering Wheel to Aid in Land Vehicle Guidance" by Steele et al. of University of Michigan, 5 pages, Oct. 1, 2001. cited by applicant . "Robotic DGM Tow Vehicle Project Overview" by Hodo et al., Auburn University Electrical and Computer Engineering Department, 9 pages, 2010. cited by applicant . Wikipedia "X Window System" 19 pages, Dec. 22, 2014. cited by applicant . "2013 Dodge Dart: the hot compact car" Brochure, www.dart-mouth.com/engineering-development.html, 6 pages, 2013. cited by applicant . "Steering Assistance for Backing Up Articulated Vehicles" by Zobel et al., Systemics, Cybernetics and Informatics, vol. 1, No. 5, 6 pages (101-106), 2003. cited by applicant . Toyota Hybrid System Diagnosis--Course 072, "Electric Power Steering" Section 7, 9 pages, Jun. 30, 2004. cited by applicant . https//webista.bmw.co/webista/show?id=1860575499&lang=engb&print=1, "Fully Automatic Trailer Tow Hitch with LIN Bus" 5 pages, Mar. 6, 2013. cited by applicant. |
Primary Examiner: Kong; Sze-Hon
Attorney, Agent or Firm: Coppiellie; Raymond Price Heneveld LLP
Parent Case Text
CROSS-REFERENCE TO RELATED APPLICATIONS
This application is a divisional application that claims priority to and the benefit under 35 U.S.C. .sctn. 121 of U.S. patent application Ser. No. 14/289,888, which was filed on May 29, 2014, now U.S. Pat. No. 9,854,209, entitled "DISPLAY SYSTEM UTILIZING VEHICLE AND TRAILER DYNAMICS," which is a continuation-in-part of U.S. patent application Ser. No. 14/256,427, which was filed on Apr. 18, 2014, now U.S. Pat. No. 9,493,187, entitled "CONTROL FOR TRAILER BACKUP ASSIST SYSTEM," which is a continuation-in-part of U.S. patent application Ser. No. 14/249,781, which was filed on Apr. 10, 2014, now U.S. Pat. No. 9,374,562, entitled "SYSTEM AND METHOD FOR CALCULATING A HORIZONTAL CAMERA TO TARGET DISTANCE," which is a continuation-in-part of U.S. patent application Ser. No. 14/188,213, which was filed on Feb. 24, 2014, now U.S. Patent Application Publication No. 2014/0172232 A1, entitled "SENSOR SYSTEM AND METHOD FOR MONITORING TRAILER HITCH ANGLE," which is a continuation-in-part of U.S. patent application Ser. No. 13/847,508, which was filed on Mar. 20, 2013, now U.S. Patent Application Publication No. 2014/0288769 A1, entitled "HITCH ANGLE ESTIMATION." U.S. patent application Ser. No. 14/188,213, now U.S. Patent Application Publication No. 2014/0172232 A1, is also a continuation-in-part of U.S. patent application Ser. No. 14/068,387, which was filed on Oct. 31, 2013, now U.S. Pat. No. 9,102,271, entitled "TRAILER MONITORING SYSTEM AND METHOD," which is a continuation-in-part of U.S. patent application Ser. No. 14/059,835, which was filed on Oct. 22, 2013, now U.S. Pat. No. 9,248,858, entitled "TRAILER BACKUP ASSIST SYSTEM," which is a continuation-in-part of U.S. patent application Ser. No. 13/443,743 which was filed on Apr. 10, 2012, now U.S. Pat. No. 8,825,328, entitled "DETECTION OF AND COUNTERMEASURES FOR JACKKNIFE ENABLING CONDITIONS DURING TRAILER BACKUP ASSIST," which is a continuation-in-part of U.S. patent application Ser. No. 13/336,060, which was filed on Dec. 23, 2011, now U.S. Pat. No. 8,909,426, entitled "TRAILER PATH CURVATURE CONTROL FOR TRAILER BACKUP ASSIST," which claims benefit from U.S. Provisional Patent Application No. 61/477,132, which was filed on Apr. 19, 2011, entitled "TRAILER BACKUP ASSIST CURVATURE CONTROL." U.S. patent application Ser. No. 14/249,781, now U.S. Pat. No. 9,374,562, is also a continuation-in-part of U.S. patent application Ser. No. 14/161,832 which was filed Jan. 23, 2014, now U.S. Pat. No. 9,346,396, entitled "SUPPLEMENTAL VEHICLE LIGHTING SYSTEM FOR VISION BASED TARGET DETECTION," which is a continuation-in-part of U.S. patent application Ser. No. 14/059,835 which was filed on Oct. 22, 2013, now U.S. Pat. No. 9,248,858, entitled "TRAILER BACKUP ASSIST SYSTEM." Furthermore, U.S. patent application Ser. No. 14/249,781, now U.S. Pat. No. 9,374,562, is a continuation-in-part of U.S. application Ser. No. 14/201,130 which was filed on Mar. 7, 2014, now U.S. Pat. No. 9,290,202, entitled "SYSTEM AND METHOD OF CALIBRATING A TRAILER BACKUP ASSIST SYSTEM," which is a continuation-in-part of U.S. patent application Ser. No. 14/068,387, which was filed on Oct. 31, 2013, now U.S. Pat. No. 9,102,271, entitled "TRAILER MONITORING SYSTEM AND METHOD." The aforementioned related applications are hereby incorporated by reference in their entirety.
Claims
What is claimed is:
1. A vehicle and trailer monitoring system comprising: a controller in communication with a screen and a plurality of imaging devices configured to capture image data disposed on the vehicle and the trailer, the controller operable to: receive a hitch angle corresponding to a connection between the vehicle and the trailer; display a combined image on the screen corresponding to a first and a second field of view of the plurality of imaging devices based on the hitch angle; and identify an occluded portion of the image data, wherein the occluded portion indicates a region of the image data occluded by the trailer; and identify at least one feature located in the occluded portion based on a position identified from a global positioning system (GPS).
2. The monitoring system according to claim 1, wherein the combined image comprises a fused image combining the first field of view and the second field of view to generate an expanded field of view.
3. The monitoring system according to claim 2, wherein the first field of view corresponds to a first imaging device disposed on the vehicle and the second field of view corresponds to a second imaging device disposed on the trailer.
4. The monitoring system according to claim 1, wherein the controller is further operable to: receive a wheel steer angle of the vehicle.
5. The monitoring system according to claim 1, wherein the controller is further operable to incorporate a representation of the at least one feature in the image data demonstrating the location of the at least one feature relative to the vehicle.
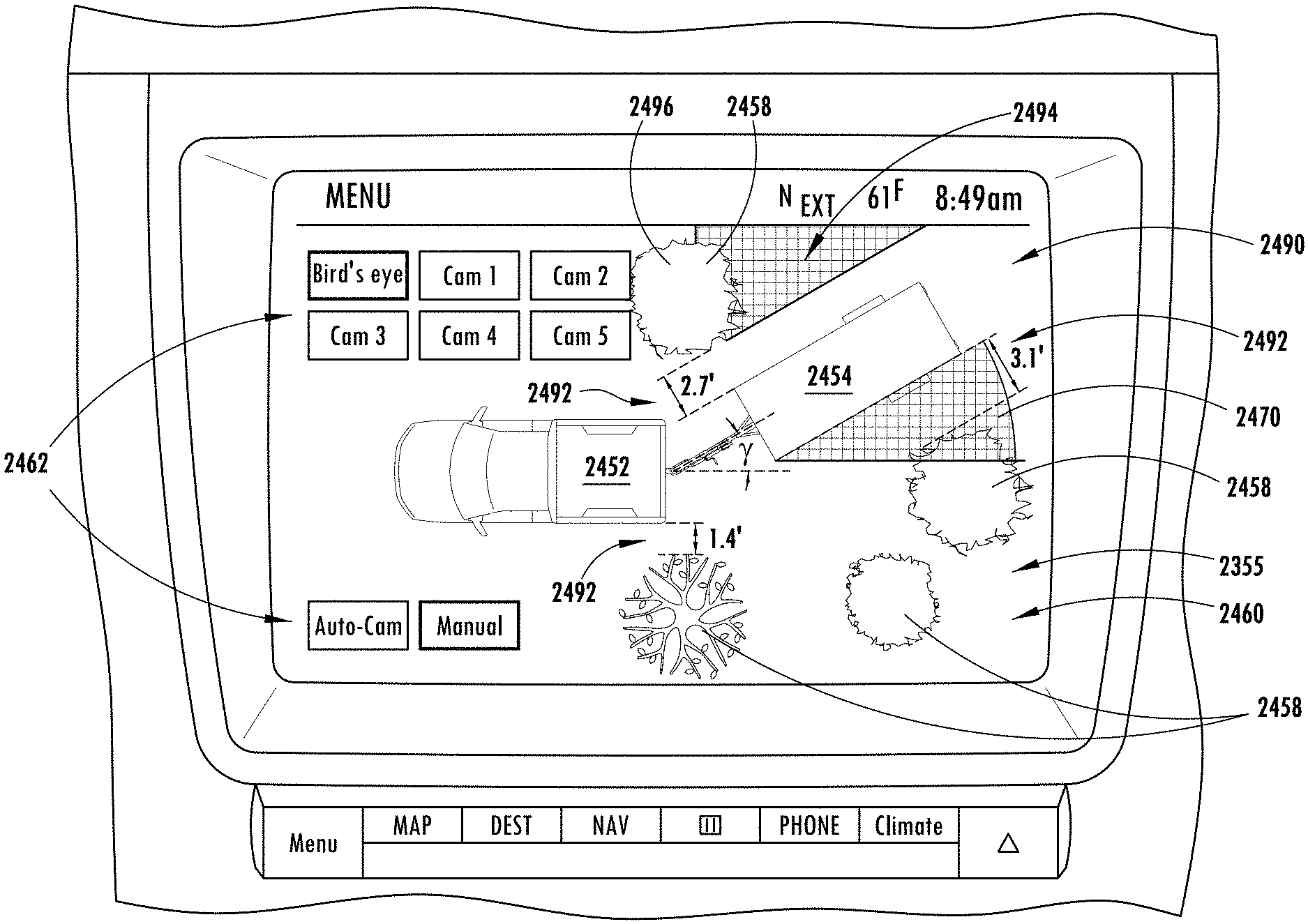
6. A display system comprising: a plurality of imaging devices disposed on a vehicle and a trailer, each comprising a field of view; and a screen disposed in the vehicle; a controller in communication with the imaging devices and the screen and operable to: receive a hitch angle corresponding to the angle between the vehicle and the trailer; identify an occluded portion of at least one of the fields of view; generate an aerial view of the vehicle and the trailer based on the hitch angle, wherein the aerial view demonstrates the occluded portion; and utilize GPS data to identify at least one feature in the occluded portion.
7. The display system according to claim 6, wherein the aerial view is generated by combining the fields of view of the plurality of imaging devices.
8. The display system according to claim 6, wherein the aerial view of the vehicle and the trailer is simulated as graphics on the screen demonstrating the hitch angle between the vehicle and the trailer.
9. The display system according to claim 6, wherein the aerial view of the trailer is simulated based on at least one of a plurality of trailer dimensions determined from a relationship among the fields of view of the plurality of imaging devices and the hitch angle, and at least one manually input trailer dimension.
10. The display system according to claim 6, wherein the controller is further operable to: overlay graphical data from a satellite image located in the aerial view based on a GPS location of the vehicle.
11. The display system according to claim 10, wherein the controller is configured to orient the graphic in response to a navigation bearing of the vehicle.
12. The display system according to claim 6, wherein the occluded portion corresponds to a portion of the environment proximate the trailer that is not visible in the plurality of fields of view.
13. The display system according to claim 6, wherein the controller is further operable to display the at least one feature in the aerial view demonstrating composite image data identifying a position of the at least one feature relative to the trailer.
14. A method for controlling a vehicle and trailer monitoring system, the method comprising: capturing image data from a plurality of imaging devices disposed on the vehicle and the trailer; receiving a hitch angle corresponding to a connection between the vehicle and the trailer; displaying a combined image corresponding to a first and a second field of view of the plurality of imaging devices based on the hitch angle; identifying an occluded portion of at least one of the first field of view and the second field of view; utilizing GPS data to identify at least one feature in the occluded portion; and displaying the at least one feature in at least one of the first field of view and the second field of view demonstrating composite image data identifying a position of the at least one feature relative to the trailer.
15. The method according to claim 14, further comprising: fusing the first field of view and the second field of view generating an expanded field of view comprising a fused image.
16. The method according to claim 15, wherein the first field of view is captured via a first imaging device disposed on the vehicle and the second field of view is captured by a second imaging device disposed on the trailer.
17. The method according to claim 14, further comprising: receiving a wheel steer angle of the vehicle; and demonstrating a future position of the trailer with the simulated graphic based on the wheel steer angle and the hitch angle.
Description
FIELD OF THE INVENTION
The disclosure made herein relates generally to driver assist and active safety technologies in vehicles, and more particularly to methods of determining systems and methods for a display system to assist in operating a vehicle in connection with a trailer.
BACKGROUND OF THE INVENTION
Reversing a vehicle while towing a trailer is very challenging for many drivers. This is particularly true for drivers that are unskilled at backing vehicles with attached trailers, which may include those that drive with a trailer on an infrequent basis (e.g., have rented a trailer, use a personal trailer on an infrequent basis, etc.). One reason for such difficulty is that backing a vehicle with an attached trailer requires steering inputs that are opposite to normal steering when backing the vehicle without a trailer attached and/or requires braking to stabilize the vehicle-trailer combination before a jackknife condition occurs. Another reason for such difficulty is that small errors in steering while backing a vehicle with an attached trailer are amplified thereby causing the trailer to depart from a desired path.
To assist the driver in steering a vehicle with a trailer attached, a trailer backup assist system needs to know the driver's intention. One common assumption with known trailer backup assist systems is that a driver of a vehicle with an attached trailer wants to backup straight and the system either implicitly or explicitly assumes a zero curvature path for the vehicle-trailer combination. Unfortunately most of the real-world use cases of backing a trailer involve a curved path and, thus, assuming a path of zero curvature would significantly limit usefulness of the system. Some known systems assume that a path is known from a map or path planner. To this end, some known trailer backup assist systems operate under a requirement that a trailer backup path is known before backing of the trailer commences such as, for example, from a map or a path-planning algorithm. Undesirably, such implementations of the trailer backup assist systems are known to have a relatively complex human machine interface (HMI) device to specify the path, obstacles and/or goal of the backup maneuver. Furthermore, such systems also require some way to determine how well the desired path is being followed and to know when the desired goal, or stopping point and orientation, has been met, using approaches such as cameras, inertial navigation, or high precision global positioning system (GPS). These requirements lead to a relatively complex and costly system.
Another reason backing a trailer can prove to be difficult is the need to control the vehicle in a manner that limits the potential for a jackknife condition to occur. A trailer has attained a jackknife condition when a hitch angle cannot be reduced (i.e., made less acute) while continuously backing up a trailer by application of a maximum steering input for the vehicle such as, for example, by moving steered front wheels of the vehicle to a maximum steered angle at a maximum rate of steering angle change. In the case of the jackknife angle being achieved, the vehicle must be pulled forward to relieve the hitch angle in order to eliminate the jackknife condition and, thus, allow the hitch angle to be controlled via manipulation of the steered wheels of the vehicle. However, in addition to the jackknife condition creating the inconvenient situation where the vehicle must be pulled forward, it can also lead to damage to the vehicle and/or trailer if certain operating conditions of the vehicle relating to its speed, engine torque, acceleration, and the like are not detected and counteracted. For example, if the vehicle is travelling at a suitably high speed in reverse and/or subjected to a suitably high longitudinal acceleration when the jackknife condition is achieved, the relative movement of the vehicle with respect to the trailer can lead to contact between the vehicle and trailer thereby damaging the trailer and/or the vehicle.
SUMMARY OF THE INVENTION
According to one aspect of the present invention, a vehicle and trailer display system is disclosed. The display system includes a plurality of imaging devices disposed on the vehicle, each having a field of view. The display system further includes a screen disposed in the vehicle operable to display images from the imaging devices. A controller is in communication with the imaging devices and the screen and is operable to receive a hitch angle corresponding to the angle between the vehicle and the trailer. Based on the hitch angle, the controller is operable to select a field of view of an imaging device to display on the screen.
According to another aspect of the present invention, a vehicle and trailer monitoring system is disclosed including a controller in communication with a screen and a plurality of imaging devices disposed on the vehicle and the trailer. The controller operable to receive a hitch angle corresponding to a connection between the vehicle and the trailer. Based on the hitch angle, the controller is operable to display a first combined image on the screen corresponding to a first and a second field of view of the plurality of imaging devices.
According to a further aspect of the present invention, a display system is disclosed including a plurality of imaging devices disposed on a vehicle and a trailer. Each of the imaging devices is operable to capture image data in a field of view. The display system also includes a screen disposed in the vehicle and a controller in communication with the imaging devices and the screen. The controller is operable to receive a hitch angle corresponding to the angle between the vehicle to the trailer and generate an aerial view of the vehicle and the trailer based on the hitch angle.
These and other aspects, objects, and features of the present invention will be understood and appreciated by those skilled in the art upon studying the following specification, claims, and appended drawings.
BRIEF DESCRIPTION OF THE DRAWINGS
In the drawings:
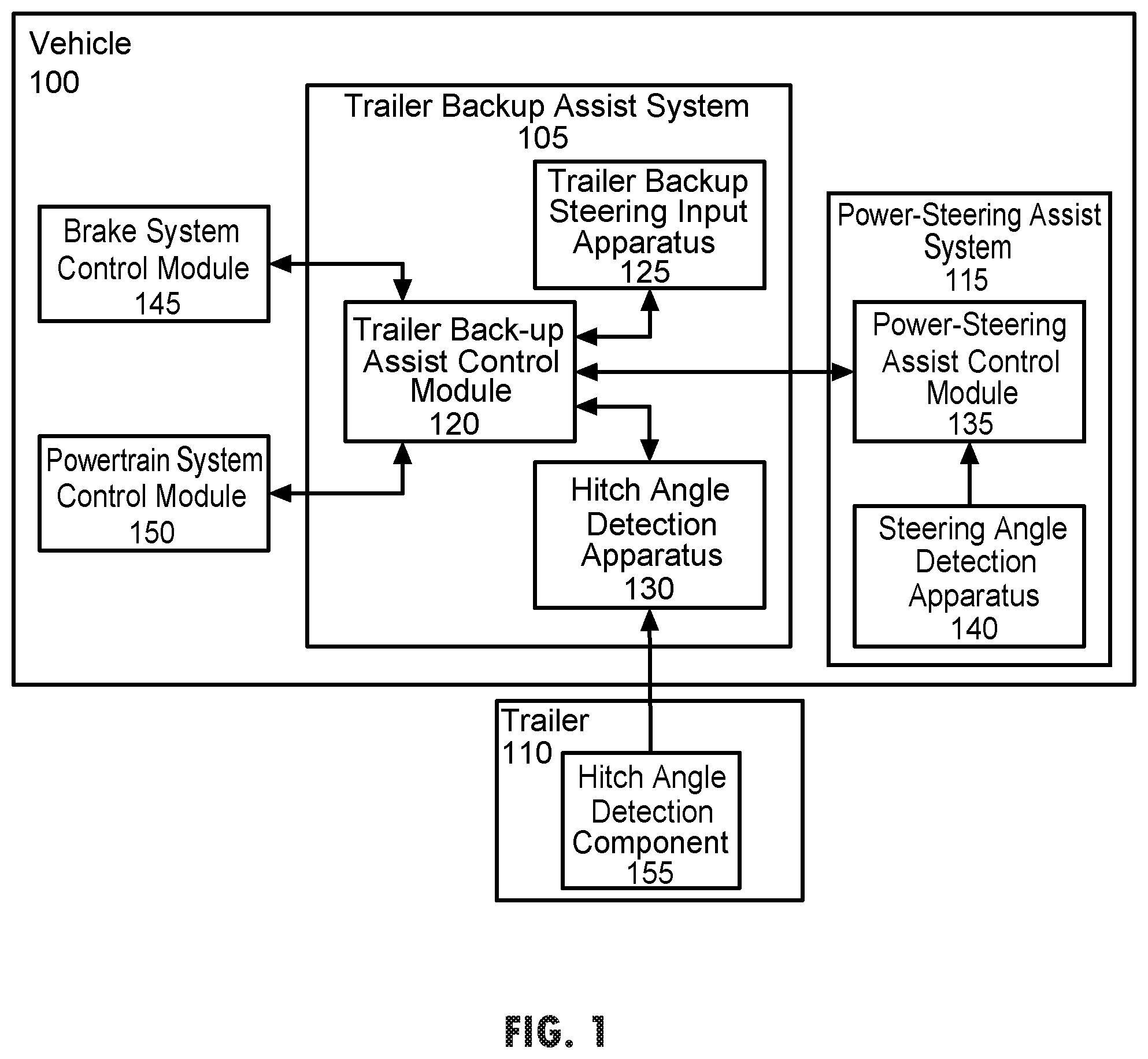
FIG. 1 shows a vehicle-trailer combination, the vehicle being configured for performing trailer backup assist functionality in accordance with an embodiment;
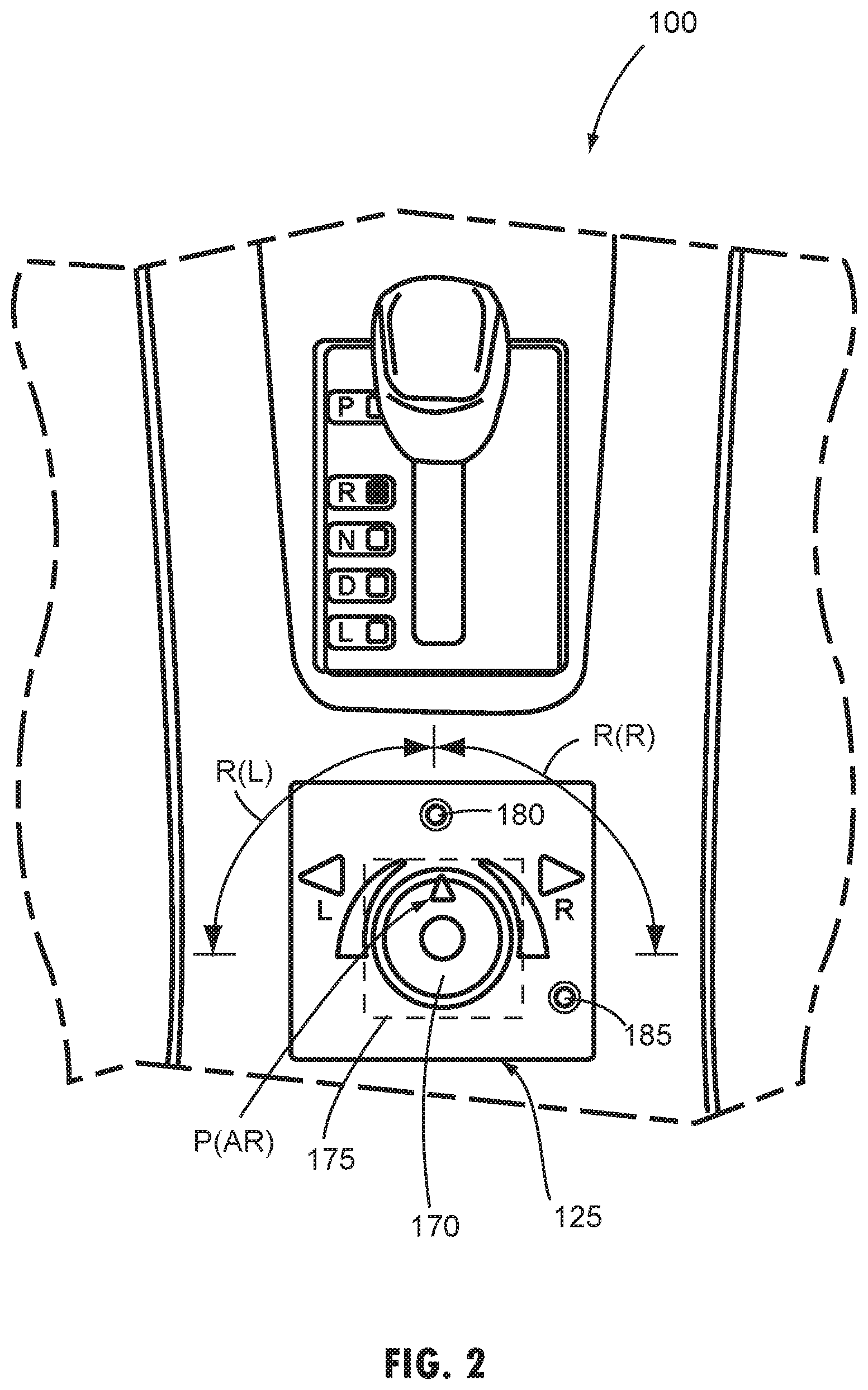
FIG. 2 shows one embodiment of the trailer backup steering input apparatus discussed in reference to FIG. 1;
FIG. 3 shows an example of a trailer backup sequence implemented using the trailer backup steering input apparatus discussed in reference to FIG. 2;
FIG. 4 shows a method for implementing trailer backup assist functionality in accordance with an embodiment;
FIG. 5 is a diagrammatic view showing a kinematic model configured for providing information utilized in providing trailer backup assist functionality in accordance with one embodiment;
FIG. 6 is a graph showing an example of a trailer path curvature function plot for a rotary-type trailer backup steering input apparatus configured in accordance with the disclosed subject matter;
FIG. 7 is a diagrammatic view showing a relationship between hitch angle and steered angle as it relates to determining a jackknife angle for a vehicle/trailer system in reverse or backing up;
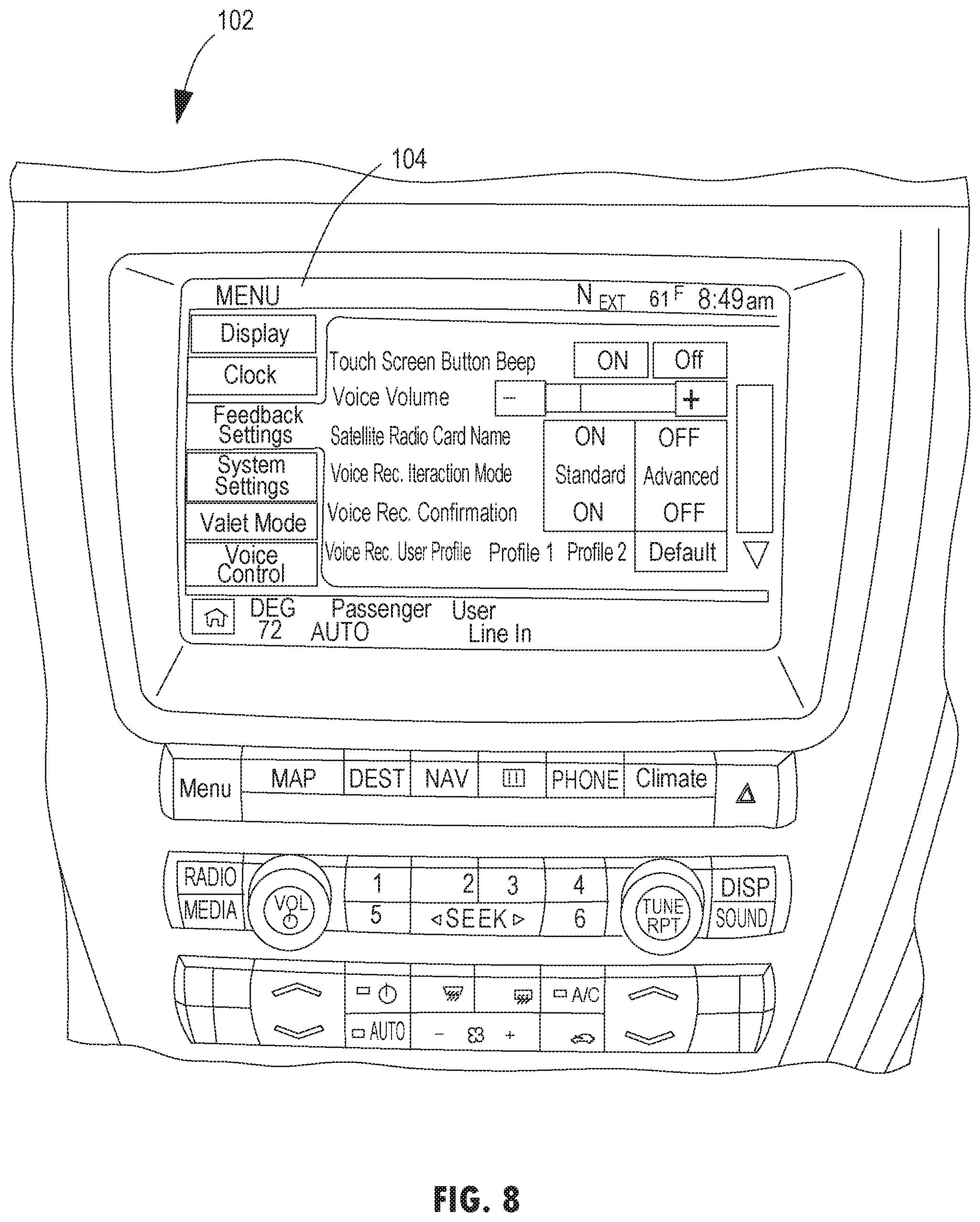
FIG. 8 shows a human machine interface (HMI) device associated with the trailer backup assist;
FIG. 9 shows a flow diagram associated with the trailer backup assist;
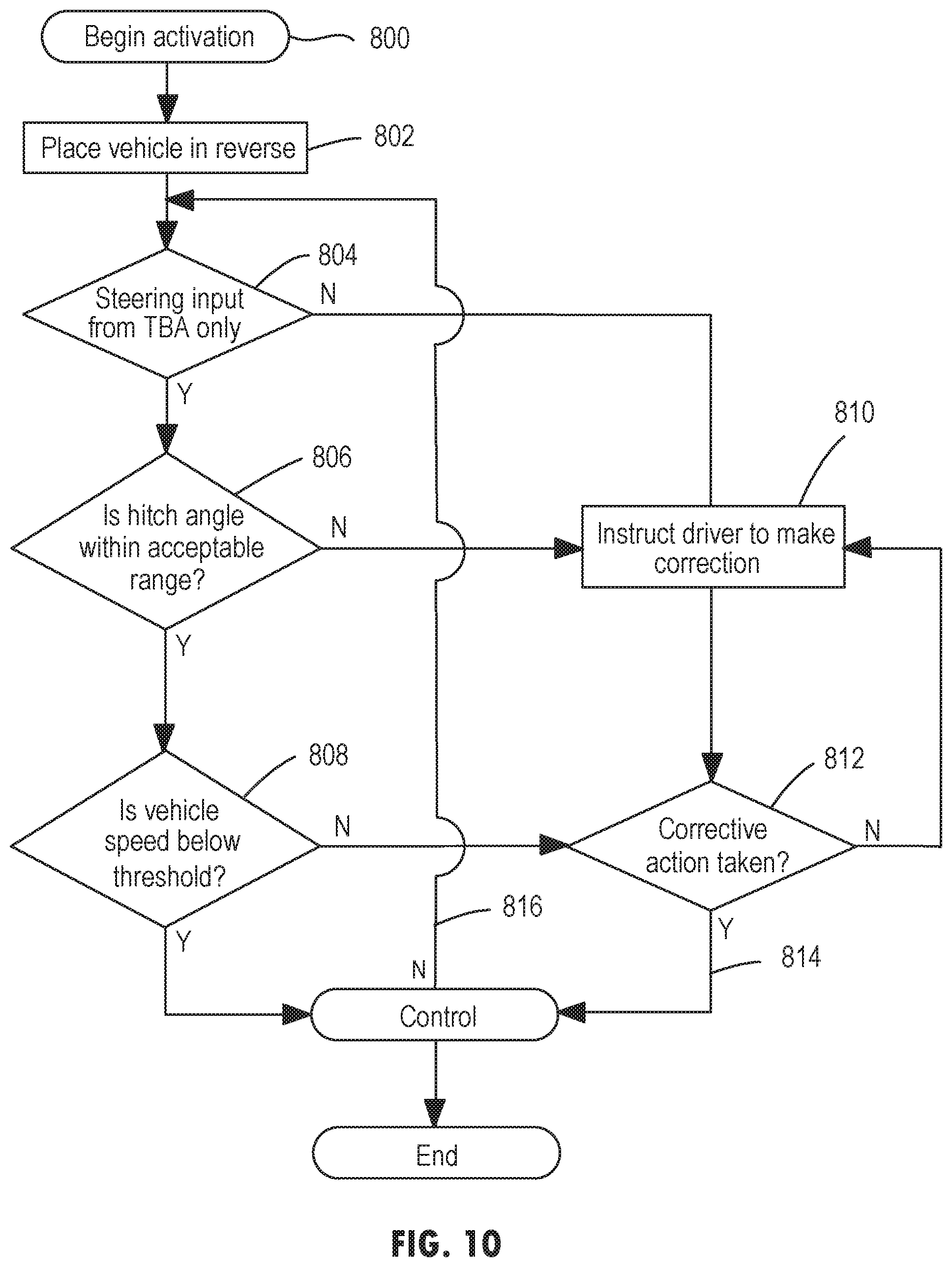
FIG. 10 shows a flow diagram of the setup module according to one embodiment;
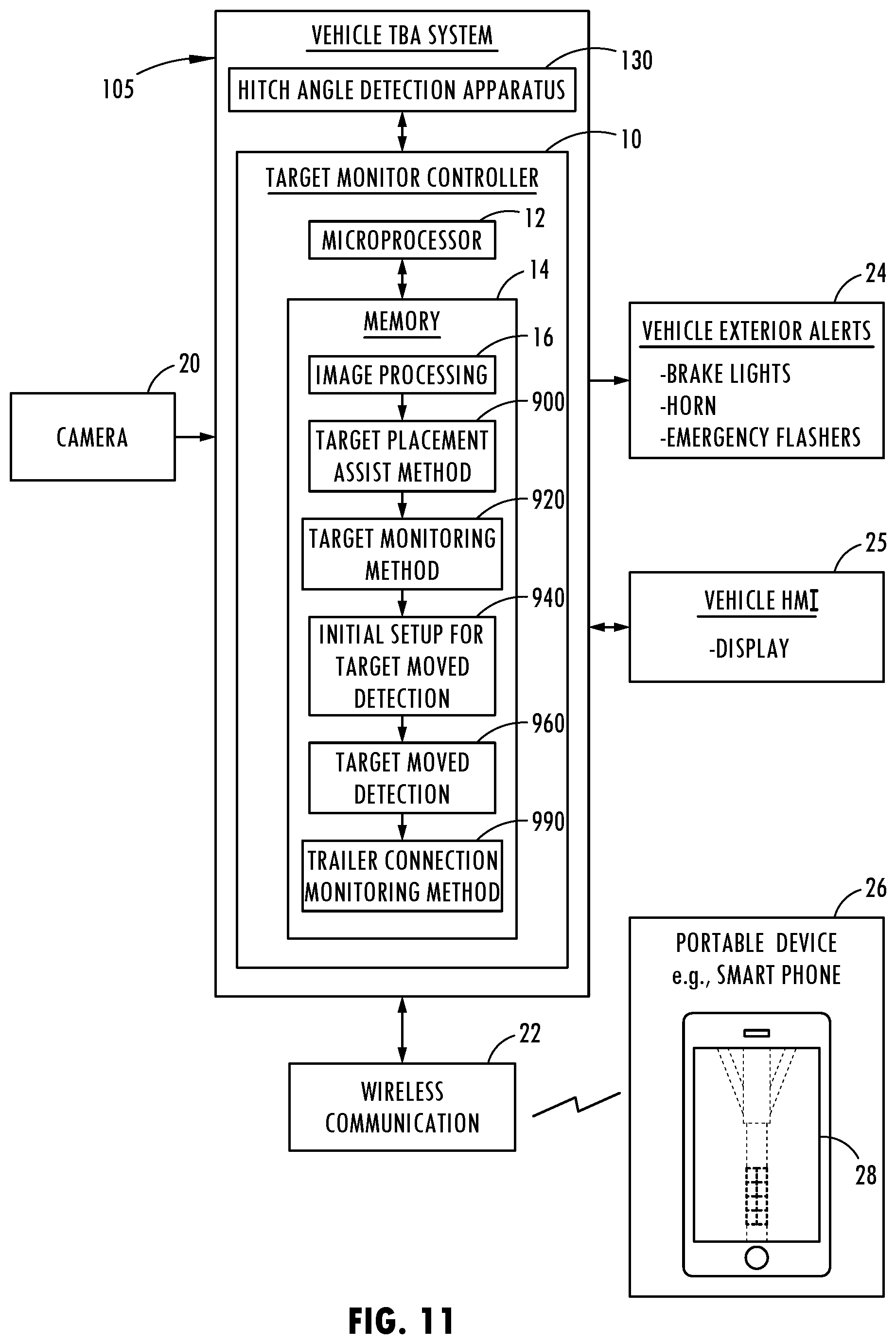
FIG. 11 is a block diagram illustrating the vehicle trailer backup assist system employing a target monitor controller, according to one embodiment;
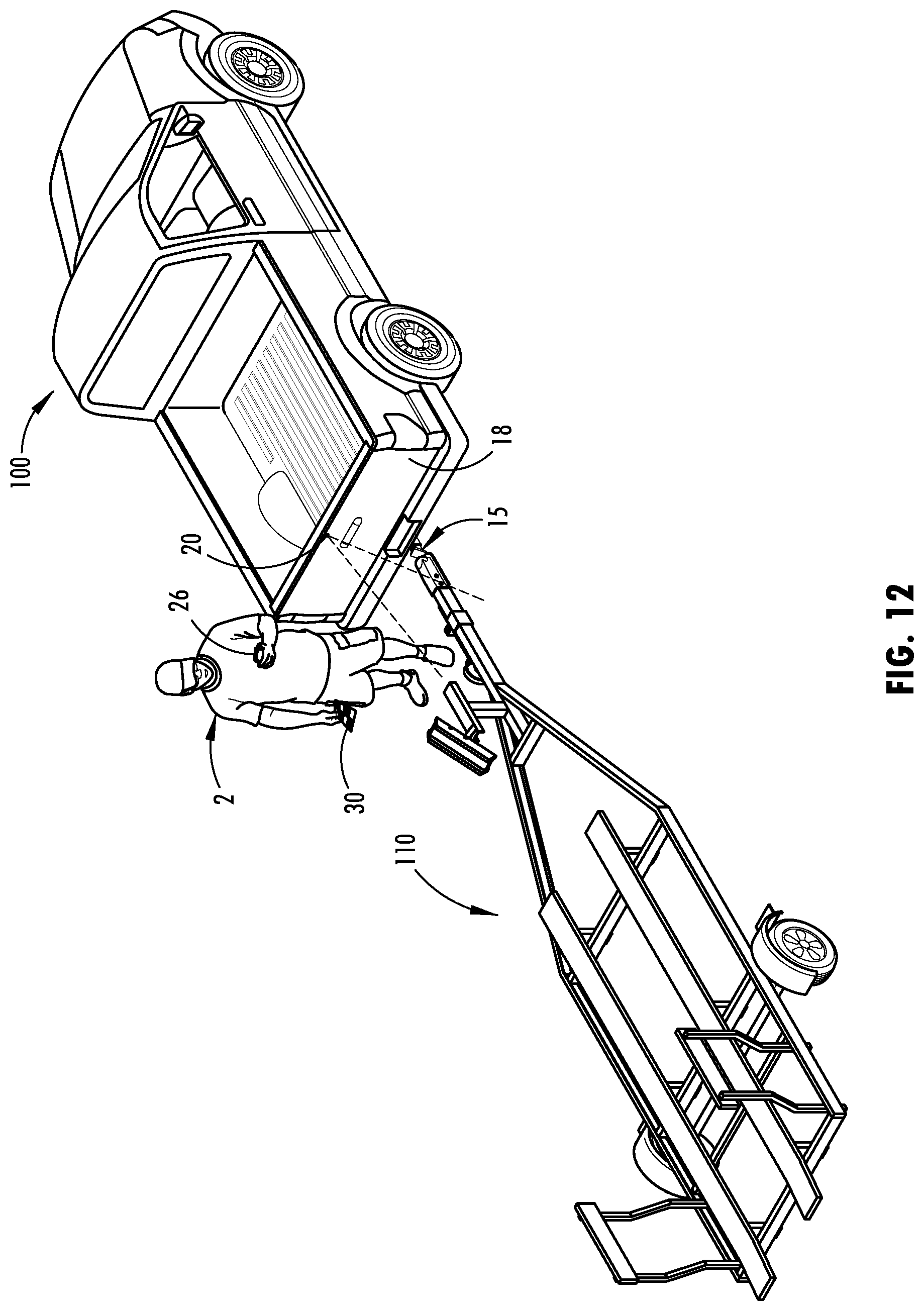
FIG. 12 is a schematic diagram illustrating user placement of the target on a trailer towed by a vehicle;
FIG. 13 is an enlarged view of the front portion of the trailer further illustrating the target placement zone in relation to the target sticker;
FIG. 14 is a front view of a portable device having a display illustrating the overlay of a target onto a target placement zone on the trailer;
FIG. 15 is a flow diagram illustrating a method of assisting a user with the placement of the target on the trailer;
FIG. 16 is a flow diagram illustrating a method of monitoring placement of the target on the trailer and generating feedback alert;
FIG. 17 is a schematic view of a front portion of the trailer having a target mounting system assembled thereto, according to one embodiment;
FIG. 18 is an exploded view of the target mounting system and trailer shown in FIG. 18;
FIG. 19 is a flow diagram illustrating an initial set up routine for monitoring the trailer connection for target changes and resetting trailer selection;
FIG. 20 is a flow diagram illustrating a target moved detection routine for monitoring presence of trailer changes and resetting trailer selection;
FIG. 21A is an image of the trailer showing the target in a first position;
FIG. 21B is an image of the trailer showing movement of the target to a second position, according to one example;
FIG. 22 is a flow diagram illustrating a trailer connection monitoring routine for monitoring trailer disconnection;
FIG. 23 is a top plan view of a trailer attached to a vehicle having a sensor system, according to one embodiment;
FIG. 24 is a block diagram illustrating the trailer backup assist system employing a sensor system that has a primary sensor and a secondary sensor, according to one embodiment;
FIG. 25 is a flow diagram illustrating a method for estimating an actual hitch angle of a trailer attached to a vehicle with a sensor system;
FIG. 26 is an automotive vehicle having a hitch angle estimating system of the disclosed subject matter;
FIG. 27 is a block diagram of a vehicle having a trailer coupled thereto and a relationship to the law of cosines;
FIG. 28 is a flow chart of a method of estimating a hitch angle;
FIG. 29 is a block diagram illustrating one embodiment of the trailer backup assist system having the trailer backup assist control module with a hitch angle calibration routine;
FIG. 30 is a diagram that illustrates the geometry of a vehicle and a trailer overlaid with a two-dimensional x-y coordinate system that identifies variables used to calculate kinematic information of the vehicle and trailer system;
FIG. 31 is a flow diagram illustrating one embodiment of the hitch angle calibration routine;
FIG. 32 is a flow diagram illustrating an initiating routine that is preformed prior to calculating the trailer angle offset, according to one embodiment;
FIG. 33 is a flow diagram illustrating an additional embodiment of the hitch angle calibration routine;
FIG. 34 is a flow diagram illustrating a method of calibrating a trailer backup assist system before determining an offset of the measured hitch angle;
FIG. 35 is a rear perspective view of a vehicle and a trailer having a hitch angle sensor assembly according to one embodiment;
FIG. 36 is an enlarged perspective view taken from section 42 of FIG. 35, showing one embodiment of the hitch angle sensor assembly coupled between the vehicle and the trailer;
FIG. 36A is a bottom perspective view of the hitch angle sensor assembly, as shown in FIG. 36;
FIG. 37 is a top perspective view of the hitch angle sensor assembly of FIG. 36;
FIG. 38 is an exploded top perspective view of the hitch angle sensor assembly of FIG. 36;
FIG. 39 is a top plan view of the hitch angle sensor assembly, showing the vehicle and the trailer in a straight line configuration, according to one embodiment;
FIG. 40 is a top plan view of the hitch angle sensor assembly, showing the trailer articulated to a first hitch angle, according to one embodiment;
FIG. 41 is a top plan view of the hitch angle sensor assembly, showing the trailer articulated to a second hitch angle, according to one embodiment.
FIG. 42 is a block diagram illustrating one embodiment of the trailer backup assist system having a camera based target detection system;
FIG. 43 is a top perspective view of a vehicle attached to a trailer, the vehicle having a rear camera with a vertical field of view for imaging a target disposed on the trailer;
FIG. 44 is a diagram that illustrates a vehicle and a trailer accompanied by the geometry and variables used to calculate a horizontal camera to target distance;
FIG. 45 is a diagram that illustrates certain aspects of the geometry and variables used to calculate the horizontal camera to target distance;
FIG. 46 is a diagram illustrating a vehicle and a trailer, the trailer having a draw bar with a drop;
FIG. 47 is a diagram illustrating an image taken from a rear camera showing a target disposed on a trailer;
FIG. 48 is a schematic diagram illustrating a vehicle coupled to a trailer;
FIG. 49, a top plan view of a vehicle connected to a trailer demonstrating a plurality of fields of view corresponding to imaging device;
FIG. 50 is a block diagram of an imaging controller in communication with a plurality of imaging devices;
FIG. 51 is a top plan view of a vehicle connected to a trailer demonstrating a plurality of fields of view corresponding to a plurality of imaging device;
FIG. 52 is diagram of an aerial view of a vehicle and a trailer displayed on an HMI device;
FIG. 53 is a top plan view of a vehicle connected to a trailer demonstrating an occluded portion of a plurality of fields of view;
FIG. 54 is a diagram of an aerial view of a vehicle and a trailer displayed on an HMI device; and
FIG. 55 is a diagram of an expanded view comprising a combination of a plurality of fields of view displayed on an HMI device in accordance with the disclosure.
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
While various aspects of the inventive subject matter are described with reference to a particular illustrative embodiment, the inventive subject matter is not limited to such embodiments, and additional modifications, applications, and embodiments may be implemented without departing from the inventive subject matter. In the figures, like reference numbers will be used to illustrate the same components. Those skilled in the art will recognize that the various components set forth herein may be altered without varying from the scope of the inventive subject matter.
The disclosed subject matter is directed to providing trailer backup assist functionality in a manner that is relatively low cost and that offers an intuitive user interface. In particular, such trailer backup assist functionality provides for controlling curvature of a path of travel of a trailer attached to a vehicle (i.e., trailer path curvature control) by allowing a driver of the vehicle to specify a desired path of the trailer by inputting a desired trailer path curvature as the backup maneuver of the vehicle and trailer progresses. Although a control knob, a set of virtual buttons, or a touchscreen can each be implemented for enabling trailer path curvature control, the disclosed subject matter is not unnecessarily limited to any particular configuration of interface through which a desired trailer path curvature is inputted.
Furthermore, in the case where a steering wheel can be mechanically decoupled from steered wheels of the vehicle, the steering wheel can also be used as an interface through which a desired trailer path curvature is inputted. As will be discussed herein in greater detail, kinematical information of a system defined by the vehicle and the trailer are used to calculate a relationship (i.e., kinematics) between the trailer's curvature and the steering angle of the vehicle for determining steering angle changes of the vehicle for achieving the specified trailer path. Steering commands corresponding to the steering angle changes are used for controlling a steering system of the tow vehicle (e.g., electric power assisted steering (EPAS) system) for implementing steering angle changes of steered wheels of the vehicle to achieve (e.g., to approximate) the specified path of travel of the trailer. The trailer backup assist system automatically steers the vehicle-trailer combination as a driver uses the vehicle transmission, accelerator and brake to reverse the vehicle-trailer combination. The driver inputs a desired trailer curvature command by using an input device such as a trailer steering knob.
Trailer backup assist functionality may be directed to implementing one or more countermeasures for limiting the potential of a jackknife condition being attained between a vehicle and a trailer being towed by the vehicle while backing up. In certain embodiments, curvature of a path of travel of the trailer (i.e., trailer path curvature control) can be controlled by allowing a driver of the vehicle to specify a desired path of the trailer by inputting a desired trailer path curvature as the backup maneuver of the vehicle and trailer progresses. Although a control knob, a set of virtual buttons, or a touchscreen can each be implemented for enabling trailer path curvature control, the disclosed subject matter is not unnecessarily limited to any particular configuration of interface through which a desired trailer path curvature is inputted. Furthermore, in the case where a steering wheel can be mechanically decoupled from steered wheels of the vehicle, the steering wheel can also be used as an interface through which a desired trailer path curvature is inputted. As will be discussed herein in greater detail, kinematic information of a system defined by the vehicle and the trailer are used to calculate a relationship (i.e., kinematics) between the trailer's curvature and the steering angle of the vehicle for determining steering angle changes of the vehicle for achieving the specified trailer path. Steering commands corresponding to the steering angle changes are used for controlling a steering system of the tow vehicle (e.g., electric power assisted steering (EPAS) system) for implementing steering angle changes of steered wheels of the vehicle to achieve (e.g., to approximate) the specified path of travel of the trailer.
Embodiments of the disclosed subject matter are directed to trailer backup assist functionality that provides for a user interface for a system that controls curvature of a path of a trailer being backed by a vehicle. More specifically, trailer backup assist functionality configured in accordance with embodiments of the disclosed subject matter provide for such trailer path curvature control by allowing a driver of the vehicle to specify a desired path of the trailer by inputting a desired trailer path curvature as the backup maneuver of the vehicle and trailer progresses. In response to such path of the trailer being specified by the driver, embodiments of the disclosed subject matter control a power assisted steering system (e.g., electric power assisted steering (EPAS) system) of the vehicle for implementing steering angle changes of steered wheels of the vehicle to achieve the specified trailer path. Kinematics of the vehicle and the trailer are used to determine the steering angle changes that are required for achieving the specified trailer path. Accordingly, embodiments of the disclosed subject matter provide for implementation of trailer backup assist functionality in a manner that is relatively simple and that enables use of an intuitive vehicle operator interface for specifying trailer path curvature control.
The disclosed subject matter, furthermore, includes embodiments directed to determining a hitch angle of trailer attached to the vehicle. In one such embodiment, the vehicle trailer backup assist system may utilize a target placed on the trailer, allowing the trailer backup assist system to employ information acquired via image acquisition and processing of the target. According to other embodiments, the target may be used to identify if a connected trailer has changed, trailer connection or disconnection, and other trailer related information. The target is an identifiable visual target that can be captured in an image by the video imaging camera and detected and processed via image processing. According to one embodiment, the target may attached to the trailer, preferably within a target placement zone, such that the camera and image processing may detect the target and its location on the trailer to determine trailer related information, such as the hitch angle between the trailer and the towing vehicle. The trailer backup assist system may provide to the user one or more image(s) of the trailer target zone for proper placement of the target to assist with placement of the target on the trailer. Additionally, the vehicle trailer backup assist system may monitor the target to determine if the target has been correctly placed within a desired target placement zone and provide feedback alert(s) to the user. Further, the trailer backup assist system may monitor the trailer connection by monitoring the target to determine if the target has moved to determine whether the same trailer remains connected to the tow vehicle, and may initiate action in response thereto. Further, the trailer backup assist system may monitor the hitch angle or the target to determine if the trailer may have been changed out (i.e., disconnected and replaced with another trailer), and may initiate action in response thereto.
The disclosed subject matter also provides a supplemental vehicle lighting system that is responsive to a trailer backup assist system. The system includes a rear vehicle fixture defining a keylock hole customarily used in conjunction with a corresponding keylock cylinder. A light assembly is provided in the place of a keylock cylinder and operably coupled to the keylock hole. The light assembly includes a housing having a barrel that is concentrically aligned with the keylock hole and includes a distal end and a proximal end. A lighting device is disposed inside the housing and operable to emit light through the barrel beginning from the proximal end. A lens is coupled to the distal end of the barrel and is disposed to at least partially coincide with the keylock hole, wherein the lens is configured to disperse light emitted from the lighting device to illuminate a rear vehicle area.
In some embodiments of the disclosed trailer backup assist system, it can be advantageous to use information that is representative of a hitch angle between the vehicle and a trailer attached to the vehicle. The disclosed subject matter provides embodiments directed to estimating an actual hitch angle of a trailer attached to a vehicle, as in some situations sensor information may become unavailable or may otherwise not provide an accurate measurement of the hitch angle. A hitch angle that is not accurate may introduce a potential for inadequate or improper vehicle system control, especially when the hitch angle information is important to controlling the vehicle system, such as a trailer backup assist system or a trailer brake controller. According to one embodiment, a sensor system for estimating an actual hitch angle of a trailer attached to a vehicle includes a primary sensor having a camera monitoring a target on the trailer to determine a measured hitch angle and a secondary sensor that monitors the trailer to determine an indicator of the actual hitch angle. The trailer backup assist system may then operate the vehicle when the measured hitch angle correlates with the indicator of the actual hitch angle, confirming that the measured hitch angle is a generally accurate estimate of the actual hitch angle.
According to an additional embodiment of the disclosed subject matter, a system for estimating a hitch angle between a vehicle and a trailer coupled thereto has a wireless receiver on the vehicle located a predetermined distance from a trailer mount and a wireless transmitter located at an end of the trailer opposite the trailer mount. According to one embodiment, a controller monitors power returns of a signal transmitted from the transmitter to the receiver and thereby estimates a distance between the transmitter and the receiver as a function of a path loss propagation of the transmitted signal. The hitch angle is then estimated using the estimated distance, the predetermined distance, and a trailer length.
To further ensure the accuracy of the measured hitch angle, in additional embodiments the trailer backup assist system may include a hitch angle calibration routine for determining any offset between the measured hitch angle and the actual hitch angle, based on certain vehicle and/or trailer characteristics. In one of these embodiments, a method provides for sensing a measured hitch angle with at least one hitch angle sensor on the vehicle and sensing a steering angle of the steered wheels of the vehicle. The method further provides for reversing the vehicle, and thereby determining an offset between the measured hitch angle and the actual hitch angle when the measured hitch angle and the steering angle are substantially consistent while the vehicle is reversing. Another one of these embodiments provides driving the vehicle forward substantially straight above a threshold speed while sensing a yaw rate of the vehicle and sensing a measured hitch angle of the trailer. Further, the method provides for determining an angle rate based on the measured hitch angle, and then determining an offset between the measured hitch angle and the actual hitch angle when the yaw rate and the angle rate are substantially zero. The offset may then be used to more accurately manipulate the actual hitch angle with the trailer backup assist system.
Trailer Backup Assist System
Referring to FIG. 1, an embodiment of a vehicle 100 configured for performing trailer backup assist functionality is shown. A trailer backup assist system 105 of the vehicle 100 controls the curvature of path of travel of a trailer 110 that is attached to the vehicle 100. Such control is accomplished through interaction of a power assisted steering system 115 of the vehicle 100 and the trailer backup assist system 105. During operation of the trailer backup assist system 105 while the vehicle 100 is being reversed, a driver of the vehicle 100 is sometimes limited in the manner in which he/she can make steering inputs via a steering wheel of the vehicle 100. This is because in certain vehicles the trailer backup assist system 105 is in control of the power assisted steering system 115 and the power assisted steering system 115 is directly coupled to the steering wheel (i.e., the steering wheel of the vehicle 100 moves in concert with steered wheels of the vehicle 100). As is discussed below in greater detail, a human machine interface (HMI) device of the backup assist system 105 is used for commanding changes in curvature of a path of the trailer 110 such as a knob, thereby decoupling such commands from being made at the steering wheel of the vehicle 100. However, some vehicles configured to provide trailer backup assist functionality in accordance with the disclosed subject matter will have the capability to selectively decouple steering movement from movement of steerable wheels of the vehicle, thereby allowing the steering wheel to be used for commanding changes in curvature of a path of a trailer during such trailer backup assist.
The trailer backup assist system 105 includes a trailer backup assist control module 120, a trailer backup steering input apparatus 125, and a hitch angle detection apparatus 130. The trailer backup assist control module 120 is connected to the trailer backup steering input apparatus 125 and the hitch angle detection apparatus 130 for allowing communication of information therebetween. It is disclosed herein that the trailer backup steering input apparatus can be coupled to the trailer backup assist control module 120 in a wired or wireless manner. The trailer backup assist system control module 120 is attached to a power steering assist control module 135 of the power steering assist system 115 for allowing information to be communicated therebetween. A steering angle detection apparatus 140 of the power steering assist system 115 is connected to the power steering assist control module 135 for providing information thereto. The trailer backup assist system is also attached to a brake system control module 145 and a powertrain control module 150 for allowing communication of information therebetween. Jointly, the trailer backup assist system 105, the power steering assist system 115, the brake system control module 145, the powertrain control module 150, and the gear selection device (PRNDL), define a trailer backup assist architecture configured in accordance with an embodiment.
The trailer backup assist control module 120 is configured for implementing logic (i.e., instructions) for receiving information from the trailer backup steering input apparatus 125, the hitch angle detection apparatus 130, the power steering assist control module 135, the brake system control module 145, and the powertrain control module 150. The trailer backup assist control module 120 (e.g., a trailer curvature algorithm thereof) generates vehicle steering information as a function of all or a portion of the information received from the trailer backup steering input apparatus 125, the hitch angle detection apparatus 130, the power steering assist control module 135, the brake system control module 145, and the powertrain control module 150. Thereafter, the vehicle steering information is provided to the power steering assist control module 135 for affecting steering of the vehicle 100 by the power steering assist system 115 to achieve a commanded path of travel for the trailer 110.
The trailer backup steering input apparatus 125 provides the trailer backup assist control module 120 with information defining the commanded path of travel of the trailer 110 to the trailer backup assist control module 120 (i.e., trailer steering information). The trailer steering information can include information relating to a commanded change in the path of travel (e.g., a change in radius of path curvature) and information relating to an indication that the trailer is to travel along a path defined by a longitudinal centerline axis of the trailer (i.e., along a substantially straight path of travel). As will be discussed below in detail, the trailer backup steering input apparatus 125 preferably includes a rotational control input device for allowing a driver of the vehicle 100 to interface with the trailer backup steering input apparatus 125 to command desired trailer steering actions (e.g., commanding a desired change in radius of the path of travel of the trailer and/or commanding that the trailer travel along a substantially straight path of travel as defined by a longitudinal centerline axis of the trailer). In a preferred embodiment, the rotational control input device is a knob rotatable about a rotational axis extending through a top surface/face of the knob. In other embodiments, the rotational control input device is a knob rotatable about a rotational axis extending substantially parallel to a top surface/face of the knob.
Some vehicles (e.g., those with active front steer) have a power steering assist system configuration that allows a steering wheel to be partially decoupled from movement of the steered wheels of such a vehicle. Accordingly, the steering wheel can be rotated independent of the manner in which the power steering assist system of the vehicle controls the steered wheels (e.g., as commanded by vehicle steering information provided by a power steering assist system control module from a trailer backup assist system control module configured in accordance with one embodiment). As such, in these types of vehicles where the steering wheel can be selectively decoupled from the steered wheels to allow independent operation thereof, trailer steering information of a trailer backup assist system configured in accordance with the disclosed subject matter can be provided through rotation of the steering wheel. Accordingly, it is disclosed herein that in certain embodiments, the steering wheel is an embodiment of a rotational control input device in the context of the disclosed subject matter. In such embodiments, the steering wheel would be biased (e.g., by an apparatus that is selectively engageable/activatable) to an at-rest position between opposing rotational ranges of motion.
The hitch angle detection apparatus 130, which operates in conjunction with a hitch angle detection component 155 of the trailer 110, provides the trailer backup assist control module 120 with information relating to an angle between the vehicle 100 and the trailer 110 (i.e., hitch angle information). In a preferred embodiment, the hitch angle detection apparatus 130 is a camera-based apparatus such as, for example, an existing rear view camera of the vehicle 100 that images (i.e., visually monitors) a target (i.e., the hitch angle detection component 155) attached the trailer 110 as the trailer 110 is being backed by the vehicle 100. Preferably, but not necessarily, the hitch angle detection component 155 is a dedicated component (e.g., an item attached to/integral with a surface of the trailer 110 for the express purpose of being recognized by the hitch angle detection apparatus 130). Alternatively, the hitch angle detection apparatus 130 can be a device that is physically mounted on a hitch component of the vehicle 100 and/or a mating hitch component of the trailer 110 for determining an angle between centerline longitudinal axes of the vehicle 100 and the trailer 110. The hitch angle detection apparatus 130 can be configured for detecting a jackknife enabling condition and/or related information (e.g., when a hitch angle threshold has been met).
The power steering assist control module 135 provides the trailer backup assist control module 120 with information relating to a rotational position (e.g., angle) of the wheel steer angle and/or a rotational position (e.g., turning angle(s)) of steered wheels of the vehicle 100. In certain embodiments, the trailer backup assist control module 120 can be an integrated component of the power steering assist system 115. For example, the power steering assist control module 135 can include a trailer backup assist algorithm for generating vehicle steering information as a function of all or a portion of information received from the trailer backup steering input apparatus 125, the hitch angle detection apparatus 130, the power steering assist control module 135, the brake system control module 145, and the powertrain control module 150.
The brake system control module 145 provides the trailer backup assist control module 120 with information relating to vehicle speed. Such vehicle speed information can be determined from individual wheel speeds as monitored by the brake system control module 145 or may be provided by an engine control module with signal plausibility. Vehicle speed may also be determined from an engine control module. In some instances, individual wheel speeds can also be used to determine a vehicle yaw rate and such yaw rate can be provided to the trailer backup assist control module 120 for use in determining the vehicle steering information. In certain embodiments, the trailer backup assist control module 120 can provide vehicle braking information to the brake system control module 145 for allowing the trailer backup assist control module 120 to control braking of the vehicle 100 during backing of the trailer 110. For example, using the trailer backup assist control module 120 to regulate speed of the vehicle 100 during backing of the trailer 110 can reduce the potential for unacceptable trailer backup conditions. Examples of unacceptable trailer backup conditions include, but are not limited to, a vehicle over speed condition, a high hitch angle rate, trailer angle dynamic instability, a calculated theoretical trailer jackknife condition (defined by a maximum vehicle steering angle, drawbar length, tow vehicle wheelbase and an effective trailer length), or physical contact jackknife limitation (defined by an angular displacement limit relative to the vehicle 100 and the trailer 110), and the like. It is disclosed herein that the backup assist control module 120 can issue a signal corresponding to a notification (e.g., a warning) of an actual, impending, and/or anticipated unacceptable trailer backup condition.
The powertrain control module 150 interacts with the trailer backup assist control module 120 for regulating speed and acceleration of the vehicle 100 during backing of the trailer 110. As mentioned above, regulation of the speed of the vehicle 100 is necessary to limit the potential for unacceptable trailer backup conditions such as, for example, jackknifing and trailer angle dynamic instability. Similar to high-speed considerations as they relate to unacceptable trailer backup conditions, high acceleration and high dynamic driver curvature requests can also lead to such unacceptable trailer backup conditions.
Steering Input Apparatus
Referring now to FIG. 2, an embodiment of the trailer backup steering input apparatus 125 discussed in reference to FIG. 1 is shown. A rotatable control element in the form of a knob 170 is coupled to a movement sensing device 175. The knob 170 is biased (e.g., by a spring return) to an at-rest position P(AR) between opposing rotational ranges of motion R(R), R(L). A first one of the opposing rotational ranges of motion R(R) is substantially equal to a second one of the opposing rotational ranges of motion R(L), R(R). To provide a tactile indication of an amount of rotation of the knob 170, a force that biases the knob 170 toward the at-rest position P(AR) can increase (e.g., non-linearly) as a function of the amount of rotation of the knob 170 with respect to the at-rest position P(AR). Additionally, the knob 170 can be configured with position indicating detents such that the driver can positively feel the at-rest position P(AR) and feel the ends of the opposing rotational ranges of motion R(L), R(R) approaching (e.g., soft end stops).
The movement sensing device 175 is configured for sensing movement of the knob 170 and outputting a corresponding signal (i.e., movement sensing device signal) to the trailer assist backup input apparatus 125 shown in FIG. 1. The movement sensing device signal is generated as a function of an amount of rotation of the knob 170 with respect to the at-rest position P(AR), a rate movement of the knob 170, and/or a direction of movement of the knob 170 with respect to the at-rest position P(AR). As will be discussed below in greater detail, the at-rest position P(AR) of the knob 170 corresponds to a movement sensing device signal indicating that the vehicle 100 should be steered such that the trailer 110 is backed along a substantially straight path (zero trailer curvature request from the driver) as defined by a centerline longitudinal axis of the trailer 110 when the knob 170 was returned to the at-rest position P(AR) and a maximum clockwise and anti-clockwise position of the knob 170 (i.e., limits of the opposing rotational ranges of motion R(R), R(L)) each correspond to a respective movement sensing device signal indicating a tightest radius of curvature (i.e., most acute trajectory) of a path of travel of the trailer 110 that is possible without the corresponding vehicle steering information causing a jackknife condition. In this regard, the at-rest position P(AR) is a zero curvature commanding position with respect to the opposing rotational ranges of motion R(R), R(L). It is disclosed herein that a ratio of a commanded curvature of a path of a trailer (e.g., radius of a trailer trajectory) and a corresponding amount of rotation of the knob can vary (e.g., non-linearly) over each one of the opposing rotational ranges of motion P(L), P(R) of the knob 170. It is also disclosed therein that the ratio can be a function of vehicle speed, trailer geometry, vehicle geometry, hitch geometry and/or trailer load.
Use of the knob 170 decouples trailer steering inputs from being made at a steering wheel of the vehicle 100. In use, as a driver of the vehicle 100 backs the trailer 110, the driver can turn the knob 170 to indicate a desired curvature of a path of the trailer 110 to follow and returns the knob 170 to the at-rest position P(AR) for causing the trailer 110 to be backed along a straight line. Accordingly, in embodiments of trailer backup assist systems where the steering wheel remains physically coupled to the steerable wheels of a vehicle during backup of an attached trailer, a rotatable control element configured in accordance with the disclosed subject matter (e.g., the knob 170) provides a simple and user-friendly means of allowing a driver of a vehicle to input trailer steering commands.
It is disclosed herein that a rotational control input device configured in accordance with embodiments of the disclosed subject matter (e.g., the knob 170 and associated movement sensing device) can omit a means for being biased to an at-rest position between opposing rotational ranges of motion. Lack of such biasing allows a current rotational position of the rotational control input device to be maintained until the rotational control input device is manually moved to a different position. Preferably, but not necessarily, when such biasing is omitted, a means is provided for indicating that the rotational control input device is positioned in a zero curvature commanding position (e.g., at the same position as the at-rest position in embodiments where the rotational control input device is biased). Examples of means for indicating that the rotational control input device is positioned in the zero curvature commanding position include, but are not limited to, a detent that the rotational control input device engages when in the zero curvature commanding position, a visual marking indicating that the rotational control input device is in the zero curvature commanding position, an active vibratory signal indicating that the rotational control input device is in or approaching the zero curvature commanding position, an audible message indicating that the rotational control input device is in of approaching the zero curvature commanding position, and the like.
It is also disclosed herein that embodiments of the disclosed subject matter can be configured with a control input device that is not rotational (i.e., a non-rotational control input device). Similar to a rotational control input device configured in accordance with embodiments of the disclosed subject matter (e.g., the knob 170 and associated movement sensing device), such a non-rotational control input device is configured to selectively provide a signal causing a trailer to follow a path of travel segment that is substantially straight and to selectively provide a signal causing the trailer to follow a path of travel segment that is substantially curved. Examples of such a non-rotational control input device include, but are not limited to, a plurality of depressible buttons (e.g., curve left, curve right, and travel straight), a touchscreen on which a driver traces or otherwise inputs a curvature for path of travel commands, a button that is translatable along an axis for allowing a driver to input path of travel commands, or joystick type input and the like.
The trailer backup steering input apparatus 125 can be configured to provide feedback information to a driver of the vehicle 100. Examples of situation that such feedback information can include, but are not limited to, a status of the trailer backup assist system 105 (e.g., active, in standby (e.g., when driving forward to reduce the hitch angle and zero hitch angle to remove bias), faulted, inactive, etc.), that a curvature limit has been reached (i.e., maximum commanded curvature of a path of travel of the trailer 110), and/or a graphical representation of the vehicle and trailer orientation state. To this end, the trailer backup steering input apparatus 125 can be configured to provide a tactile feedback signal (e.g., a vibration through the knob 170) as a warning if any one of a variety of conditions occur. Examples of such conditions include, but are not limited to, the trailer 110 approaching jackknife, the trailer backup assist system 105 has had a failure, the trailer backup assist system 105 has detected a fault, the trailer backup assist system 105 or other system of the vehicle 100 has predicted a collision on the present path of travel of the trailer 110, the trailer backup system 105 has restricted a commanded curvature of a trailer's path of travel (e.g., due to excessive speed or acceleration of the vehicle 100), and the like. Still further, it is disclosed that the trailer backup steering input apparatus 125 can use illumination (e.g., an LED 180) and/or an audible signal output (e.g., an audible output device 185 or through attached vehicle audio speakers) to provide certain feedback information (e.g., notification/warning of an unacceptable trailer backup condition).
Referring now to FIGS. 2 and 3, an example of using the trailer backup steering input apparatus 125 for dictating a curvature of a path of travel (POT) of a trailer (i.e., the trailer 110 shown in FIG. 1) while backing up the trailer with a vehicle (i.e., the vehicle 100 in FIGS. 1 and 2) is shown. In preparation of backing the trailer 110, the driver of the vehicle 100 drives the vehicle 100 forward along a pull-thru path (PTP) to position the vehicle 100 and trailer 110 at a first backup position B1. In the first backup position B1, the vehicle 100 and trailer 110 are longitudinally aligned with each other such that a longitudinal centerline axis L1 of the vehicle 100 is aligned with (e.g., parallel with or coincidental with) a longitudinal centerline axis L2 of the trailer 110. It is disclosed herein that such alignment of the longitudinal axes L1, L2 at the onset of an instance of trailer backup functionality is not a requirement for operability of a trailer backup assist system configured in accordance with the disclosed subject matter.
After activating the trailer backup assist system 105 (e.g., before, after, or during the pull-thru sequence), the driver begins to back the trailer 110 by reversing the vehicle 100 from the first backup position B1. So long as the knob 170 of the trailer backup steering input apparatus 125 remains in the at-rest position P(AR), the trailer backup assist system 105 will steer the vehicle 100 as necessary for causing the trailer 110 to be backed along a substantially straight path of travel as defined by the longitudinal centerline axis L2 of the trailer 110 at the time when backing of the trailer 110 began. When the trailer reaches the second backup position B2, the driver rotates the knob 170 to command the trailer 110 to be steered to the right (i.e., a knob position R(R) clockwise rotation). Accordingly, the trailer backup assist system 105 will steer the vehicle 100 for causing the trailer 110 to be steered to the right as a function of an amount of rotation of the knob 170 with respect to the at-rest position P(AR), a rate movement of the knob 170, and/or a direction of movement of the knob 170 with respect to the at-rest position P(AR). Similarly, the trailer 110 can be commanded to steer to the left by rotating the knob 170 to the left. When the trailer reaches backup position B3, the driver allows the knob 170 to return to the at-rest position P(AR) thereby causing the trailer backup assist system 105 to steer the vehicle 100 as necessary for causing the trailer 110 to be backed along a substantially straight path of travel as defined by the longitudinal centerline axis L2 of the trailer 110 at the time when the knob 170 was returned to the at-rest position P(AR). Thereafter, the trailer backup assist system 105 steers the vehicle 100 as necessary for causing the trailer 110 to be backed along this substantially straight path to the fourth backup position B4. In this regard, arcuate portions of a path of travel POT of the trailer 110 are dictated by rotation of the knob 170 and straight portions of the path of travel POT are dictated by an orientation of the centerline longitudinal axis L2 of the trailer when the knob 170 is in/returned to the at-rest position P(AR).
In order to activate the trailer backup assist system described above in FIGS. 1-3, the driver interacts with the trailer backup assist system and the trailer backup assist system interacts with the vehicle environment. The trailer backup assist system automatically steers as the driver reverses the vehicle. As discussed above, the driver controls the trailer trajectory by using a steering knob to input desired trailer curvature. The trailer backup assist algorithm determines the vehicle steering angle to achieve the desired trailer curvature, and the driver controls the throttle and brake while the trailer backup assist system controls the steering.
FIG. 4 shows a method 200 for implementing trailer backup assist functionality in accordance with one embodiment. In a preferred embodiment, the method 200 for implementing trailer backup assist functionality can be carried out using the trailer backup assist architecture discussed above in reference to the vehicle 100 and trailer 110 of FIG. 1. Accordingly, trailer steering information is provided through use of a rotational control input device (e.g., the knob 170 discussed in reference to FIG. 2).
An operation 204 is performed for receiving a trailer backup assist request. Examples of receiving the trailer backup assist request include activating the trailer backup assist system and providing confirmation that the vehicle and trailer are ready to be backed. After receiving a trailer backup assist request (i.e., while the vehicle is being reversed), an operation 204 is performed for receiving a trailer backup information signal. Examples of information carried by the trailer backup information signal include, but are not limited to, information from the trailer backup steering input apparatus 125, information from the hitch angle detection apparatus 130, information from the power steering assist control module 135, information from the brake system control module 145, and information from the powertrain control module 150. It is disclosed herein that information from the trailer backup steering input apparatus 125 preferably includes trailer path curvature information characterizing a desired curvature for the path of travel of the trailer, such as provided by the trailer backup steering input apparatus 125 discussed above in reference to FIGS. 1 and 2. In this manner, the operation 204 for receiving the trailer backup information signal can include receiving trailer path curvature information characterizing the desired curvature for the path of travel of the trailer.
If the trailer backup information signal indicates that a change in curvature of the trailer's path of travel is requested (i.e., commanded via the knob 170), an operation 206 is performed for determining vehicle steering information for providing the requested change in curvature of the trailer's path of travel. Otherwise, an operation 208 is performed for determining vehicle steering information for maintaining a current straight-line heading of the trailer (i.e., as defined by the longitudinal centerline axis of the trailer). Thereafter, an operation 210 is performed for providing the vehicle steering information to a power steering assist system of the vehicle, followed by an operation 212 being performed for determining the trailer backup assist status. If it is determined that trailer backup is complete, an operation 214 is performed for ending the current trailer backup assist instance. Otherwise the method 200 returns to the operation 204 for receiving trailer backup information. Preferably, the operation for receiving the trailer backup information signal, determining the vehicle steering information, providing the vehicle steering information, and determining the trailer backup assist status are performed in a monitoring fashion (e.g., at a high rate of speed of a digital data processing device). Accordingly, unless it is determined that reversing of the vehicle for backing the trailer is completed (e.g., due to the vehicle having been successfully backed to a desired location during a trailer backup assist instance, the vehicle having to be pulled forward to begin another trailer backup assist instance, etc.), the method 200 will continually be performing the operations for receiving the trailer backup information signal, determining the vehicle steering information, providing the vehicle steering information, and determining the trailer backup assist status.
It is disclosed herein that the operation 206 for determining vehicle steering information for providing the requested change in curvature of the trailer's path of travel preferably includes determining vehicle steering information as a function of trailer path curvature information contained within the trailer backup information signal. As will be discussed below in greater detail, determining vehicle steering information can be accomplished through a low order kinematic model defined by the vehicle and the trailer. Through such a model, a relationship between the trailer path curvature and commanded steering angles of steered wheels of the vehicle can be generated for determining steering angle changes of the steered wheels for achieving a specified trailer path curvature. In this manner, the operation 206 for determining vehicle steering information can be configured for generating information necessary for providing trailer path curvature control in accordance with the disclosed subject matter.
In some embodiments of the disclosed subject matter, the operation 210 for providing the vehicle steering information to the power steering assist system of the vehicle causes the steering system to generate a corresponding steering command as a function of the vehicle steering information. The steering command is interpretable by the steering system and is configured for causing the steering system to move steered wheels of the steering system for achieving a steered angle as specified by the vehicle steering information. Alternatively, the steering command can be generated by a controller, module or computer external to the steering system (e.g., a trailer backup assist control module) and be provided to the steering system.
In parallel with performing the operations for receiving the trailer backup information signal, determining the vehicle steering information, providing the vehicle steering information, and determining the trailer backup assist status, the method 200 performs an operation 216 for monitoring the trailer backup information for determining if an unacceptable trailer backup condition exists. Examples of such monitoring include, but are not limited to assessing a hitch angle to determine if a hitch angle threshold is exceeded, assessing a backup speed to determine if a backup speed threshold is exceeded, assessing vehicle steering angle to determine if a vehicle steering angle threshold is exceeded, assessing other operating parameters (e.g., vehicle longitudinal acceleration, throttle pedal demand rate and hitch angle rate) for determining if a respective threshold value is exceeded, and the like. Backup speed can be determined from wheel speed information obtained from one or more wheel speed sensors of the vehicle. If it is determined that an unacceptable trailer backup condition exists, an operation 218 is performed for causing the current path of travel of the trailer to be inhibited (e.g., stopping motion of the vehicle), followed by the operation 214 being performed for ending the current trailer backup assist instance. It is disclosed herein that prior to and/or in conjunction with causing the current trailer path to be inhibited, one or more actions (e.g., operations) can be implemented for providing the driver with feedback (e.g., a warning) that such an unacceptable hitch angle condition is impending or approaching. In one example, if such feedback results in the unacceptable hitch angle condition being remedied prior to achieving a critical condition, the method can continue with providing trailer backup assist functionality in accordance with operations 204-212. Otherwise, the method can proceed to operation 214 for ending the current trailer backup assist instance. In conjunction with performing the operation 214 for ending the current trailer backup assist instance, an operation can be performed for controlling movement of the vehicle to correct or limit a jackknife condition (e.g., steering the vehicle, decelerating the vehicle, limiting magnitude and/or rate of driver requested trailer curvature input, limiting magnitude and/or rate of the steering command, and/or the like to preclude the hitch angle from being exceeded).
Jackknife Detection
Referring to FIG. 5, in preferred embodiments of the disclosed subject matter, it is desirable to limit the potential for the vehicle 302 and the trailer 304 to attain a jackknife angle (i.e., the vehicle/trailer system achieving a jackknife condition). A jackknife angle .gamma.(j) refers to a hitch angle .gamma. that while backing cannot be overcome by the maximum steering input for a vehicle such as, for example, the steered front wheels 306 of the vehicle 302 being moved to a maximum steered angle .delta. at a maximum rate of steering angle change. The jackknife angle .gamma.(j) is a function of a maximum wheel angle for the steered wheel 306 of the vehicle 302, the wheel base W of the vehicle 302, the distance L between hitch point 308 and the rear axle 310 of the vehicle 302, and the length D between the hitch point 308 and the effective axle 312 of the trailer 304 when the trailer has multiple axles. The effective axle 312 may be the actual axle for a single axle trailer or an effective axle location for a trailer with multiple axles. When the hitch angle .gamma. for the vehicle 302 and the trailer 304 achieves or exceeds the jackknife angle .gamma.(j), the vehicle 302 must be pulled forward to reduce the hitch angle .gamma.. Thus, for limiting the potential for a vehicle/trailer system attaining a jackknife angle, it is preferable to control the yaw angle of the trailer while keeping the hitch angle of the vehicle/trailer system relatively small.
FIG. 6 shown an example of a trailer path curvature function plot 400 for a rotary-type trailer backup steering input apparatus (e.g., the trailer backup steering input apparatus 125 discussed above in reference to FIGS. 1 and 2). A value representing trailer path curvature (e.g., trailer path curvature .kappa.2) is provided as an output signal from the rotary-type trailer backup steering input apparatus as a function of user input movement. In this example, a curve 402 specifying trailer path curvature relative to user input (e.g., amount of rotation) at a rotary input device (e.g., a knob) is defined by a cubic function. However, a skilled person will appreciate that embodiments of the disclosed subject matter are not limited to any particular function between a magnitude and/or rate of input at a trailer backup steering input apparatus (e.g., knob rotation) and a resulting trailer path curvature value.
Referring to FIGS. 5 and 7, a steering angle limit for the steered front wheels 306 requires that the hitch angle .gamma. cannot exceed the jackknife angle .gamma.(j), which is also referred to as a critical hitch angle. Thus, under the limitation that the hitch angle .gamma. cannot exceed the jackknife angle .gamma.(j), the jackknife angle .gamma.(j) is the hitch angle .gamma. that maintains a circular motion for the vehicle/trailer system when the steered wheels 306 are at a maximum steering angle .delta.(max). The steering angle for circular motion with hitch angle is defined by the following equation.
.times..times..delta..times..times..times..times..gamma..times..times..ti- mes..times..gamma. ##EQU00001##
Solving the above equation for hitch angle allows jackknife angle .gamma.(j) to be determined. This solution, which is shown in the following equation, can be used in implementing trailer backup assist functionality in accordance with the disclosed subject matter for monitoring hitch angle in relation to jackknife angle.
.times..times..gamma..+-..times..times..times..times. ##EQU00002## where, a=L.sup.2 tan.sup.2 .delta.(max)+W.sup.2; b=2LD tan.sup.2 .delta.(max); and c=D.sup.2 tan.sup.2 .delta.(max)-W.sup.2.
In certain instances of backing a trailer, a jackknife enabling condition can arise based on current operating parameters of a vehicle in combination with a corresponding hitch angle. This condition can be indicated when one or more specified vehicle operating thresholds are met while a particular hitch angle is present. For example, although the particular hitch angle is not currently at the jackknife angle for the vehicle and attached trailer, certain vehicle operating parameters can lead to a rapid (e.g., uncontrolled) transition of the hitch angle to the jackknife angle for a current commanded trailer path curvature and/or can reduce an ability to steer the trailer away from the jackknife angle. One reason for a jackknife enabling condition is that trailer curvature control mechanisms (e.g., those in accordance with the disclosed subject matter) generally calculate steering commands at an instantaneous point in time during backing of a trailer. However, these calculations will typically not account for lag in the steering control system of the vehicle (e.g., lag in a steering EPAS controller). Another reason for the jackknife enabling condition is that trailer curvature control mechanisms generally exhibit reduced steering sensitivity and/or effectiveness when the vehicle is at relatively high speeds and/or when undergoing relatively high acceleration.
Human Machine Interface
In order to implement the method described in FIG. 5, a driver may interact with the trailer backup assist system 105 to configure the system 105. The vehicle 100 is also equipped, as shown in FIG. 8, with a human machine interface (HMI) device 102 to implement trailer backup assist functionality through driver interaction with the HMI device 102.
FIG. 8 shows an example of an HMI device 102 in the vehicle that a driver uses to interact with the trailer backup assist system 105. The driver is presented with multiple menus 104 (only one example menu is shown in FIG. 8) displayed by way of the HMI 102. The HMI menus 104 assist the driver through modules (shown in FIGS. 9 and 10) that setup with a setup module 600, calibrate 700, and activate 800 the trailer backup assist system 105 so that control methods 200, 500 may be implemented to assist the driver with the backup of the trailer shown generally as a flow diagram in FIGS. 9 and 10, and to be discussed in greater detail later herein. Each module is directed to particular elements, or features, which are used to configure the trailer backup assist system to accurately implement control methods 200, 500. While each module is described with reference to particular features of the disclosed subject matter, it should be noted that each module is not necessarily limited to the particular features described in the examples herein. It is possible to rearrange the modules or to replace elements or features of a module without departing from the scope of the disclosed subject matter.
The trailer backup assist system 105 will guide a driver through the steps necessary to connect a trailer and attach a target. The driver may activate the setup by way of the backup steering input apparatus 125, for example by turning or pushing the rotary knob, or my merely making a selection for the trailer backup assist system from a menu on the HMI device 102. Referring to FIG. 9, a driver initiates the trailer backup assist system through the trailer backup assist steering input apparatus. In the case of a rotary knob, the driver presses or rotates the knob to initiate the trailer backup assist system. The system will guide the driver through the steps of connecting 580 a compatible trailer 110. A compatible trailer is one that pivots at a single point relative to the vehicle and behind the rear axle of the vehicle.
Once the system is selected by either the trailer backup steering input apparatus 125 or the HMI device 102, the system will guide the driver to prepare the vehicle and vehicle trailer combination as necessary. The vehicle 100 should be turned "on" and the vehicle 100 should be in "park" 590. In the event the vehicle 100 is on but is traveling at a speed that is greater than a predetermined limit, for example five miles per hour, the trailer backup assist system 105 will become inactive and inaccessible to the driver. The trailer backup assist system 105 setup module 600 will not begin or will be exited 585. If the type of trailer 110 selected by the driver is a trailer 110 that is not compatible with the trailer backup assist system 105, the setup module 600 will be exited 585 or will not begin. In the event, the trailer 110 is compatible with the trailer backup assist system 105, the setup module 600 verifies that the vehicle 100 gear shift mechanism is in "park." Again, in the event the vehicle is not "on" and the gear shift mechanism is not on "park," the setup module will not begin 585.
Upon connection 580 of a compatible trailer 110, the vehicle 100 being "on" 590 and the vehicle 100 being in "park" 590, the HMI 102 will present a menu 104 that has a "Towing" mode option to be selected by the driver. The driver selects "Towing" mode and a menu 104 is presented that provides a "Trailer Options" selection. The driver then selects a "Trailer Options" mode from the "Towing" menu. The driver is prompted to either "add a trailer" or "select a trailer" from a menu 104 presented on the HMI device and the "Setup" module 600 has begun. For certain camera-based hitch angle detection systems, an operation 602 is performed wherein a warning menu may be presented to the driver, by way of the HMI, informing the driver that the trailer must be in a straight line, meaning there is no angle at the hitch between the vehicle and the trailer. The warning indicates that the driver may need to take corrective action, for example, pull the vehicle forward in order to align the trailer and the vehicle as required for the setup with the setup module 600. A generic or static graphic may be presented by way of the HMI 102 to assist the driver in visually recognizing the alignment between the trailer 110 and the vehicle 100 that is necessary in order to properly setup and calibrate the trailer backup assist system 105. The driver applies any corrections 603 in that the driver makes any necessary adjustment he has been alerted to and indicates, by acknowledging that corrective actions have been applied 603 and that the trailer is in line with the vehicle. Other hitch angle detection systems may not need the driver to straighten the trailer during setup mode.
To aid the driver in the setup process, the reverse back lights, or any other supplemental lighting that may be available on the vehicle, are illuminated 604. In the event the trailer is a new trailer, one that has not been attached to the vehicle before or has not been previously stored in the trailer backup assist system, the driver is presented 606 with an option to either name the trailer or select a previously stored trailer configuration. Naming the trailer 608 allows the trailer to be easily identified the next time it is attached to the vehicle so that the driver does not have to repeat the setup process. The driver either enters a unique name to identify the trailer that is to be stored in the trailer backup assist system or selects a previously stored trailer configuration associated with the attached trailer. The trailer backup assist system will not allow more than one trailer to have the same name. Therefore, if a driver attempts to name a trailer using a name that has already been applied to a previously stored trailer configuration, the HMI will display a message to the driver indicating so and requesting the driver enter a different name for the trailer configuration. In the case where a previously stored trailer configuration is available and selected 610 by the driver, certain steps in the setup process may be skipped.
The following discussion is directed to a first time trailer configuration for a camera-based hitch angle detection system. The driver is instructed 612 to place a hitch angle target on the trailer that is used for calibration purposes. A generic static image may be displayed on the HMI that provides direction to the driver as to placement of a target on the trailer that is used for hitch angle detection. The target placement is dependent upon the type of trailer being towed and therefore, options may be presented to the driver to aid the driver in selecting an appropriate trailer type. The static image may indicate areas that are acceptable for target placement as well as areas that are unacceptable for target placement. The static image indicating the appropriate areas for attaching the target may be an overlay of the rear view of the trailer hitch. Once the driver attaches the target to the trailer and indicates by way of the HMI that the target has been attached to the trailer, the setup mode provides 614 visual feedback to the driver identifying that the target has been located, or acquired. The driver acknowledges 616, by way of the HMI, that the target has been properly identified by the trailer backup assist system. Similarly, for a previously stored trailer configuration, the trailer will already have a target placed thereon. The trailer backup assist system will acquire the target and provide 614 visual feedback to the driver confirming acquisition of the target.
In the event the target is not acquired 614 after a predetermined amount of time lapses, the driver is notified 618 of the need to reposition the target and presented with possible corrective measures that may be taken. Possible corrective measures may be presented to the driver such as cleaning the camera lens, cleaning the target, replacing the target if it has been damaged or faded, pulling the vehicle-trailer combination forward to improve lighting conditions around the camera and/or target, and moving the target to an acceptable location. The driver applies the necessary corrections 603. As mentioned above, some hitch angle detection systems may not require the driver to attach a target to the trailer during set up mode. The target and acquisition of the target are directed to camera-based hitch angle detection systems.
When the target is acquired 614 by the trailer backup assist system and the driver has acknowledged 616 the acquisition, the driver is then prompted through a series of menus to input 620 trailer measurement information that may be stored in the trailer backup assist system for a trailer configuration that is to be associated with the named trailer. The next time the same trailer is attached to the vehicle, its unique trailer configuration will already be stored and progress through the setup module will be faster or, in some cases, may be skipped entirely. Generic static images may be displayed at the HMI screen in order to assist the driver with the measurement information. Visual examples, see FIG. 11, may be provided to aid the driver in identifying the location on the vehicle, the trailer or between the vehicle and trailer that the driver is being prompted to enter. In addition, numerical limits for the driver entered measurements are set within the trailer backup assist system and may be displayed to the driver. The driver may be warned about entered measurements that exceed the numerical limits. Additionally, the measurement information requests that the driver is prompted to enter may be presented to the driver in the order that the measurements should be entered into the trailer backup assist system.
It should be noted that while measurement information is discussed above as being entered by the driver, various methods of entering measurement information may also be employed without departing from the scope of the disclosed subject matter. For example, a system to automatically detect measurements using existing vehicle and trailer data including, but not limited to, vehicle speed, wheel rotation, wheel steer angle, vehicle to trailer relative angle, and a rate of change of the vehicle to hitch angle.
Examples of the measurement information may include a horizontal distance from the rear of the vehicle to the center of a hitch ball, a horizontal distance from the rear of the vehicle to a center of the target, a vertical distance from the target to the ground, and a horizontal offset of the target from a centerline of the hitch ball. In the event the target is attached at other than the centerline of the hitch ball, then the trailer backup assist system must know which side of the vehicle the target is attached to, the passenger side or the driver side. A menu on the HMI may be presented for the driver to indicate passenger side or driver side for the placement of the target. The trailer backup assist system also needs to know the horizontal distance from the rear of the vehicle to a center of the axle or axles of the trailer. The measurements may be entered in either English or metric units.
The driver is presented 622 with the option to revise any of the measurements before proceeding with the setup process. Otherwise, the setup module 600 is complete 624 and the calibration module 700 begins.
The calibration module 700 is designed to calibrate the curvature control algorithm with the proper trailer measurements and calibrate the trailer backup assist system for any hitch angle offset that may be present. After completing the setup module 600, the calibration module begins 700 and the driver is instructed 702 to pull the vehicle-trailer combination straight forward until a hitch angle sensor calibration is complete. The HMI may notify 704 the driver, by way of a pop up or screen display that the vehicle-trailer combination needs to be pulled forward until calibration is complete. When calibration is complete, the HMI may notify 704 the driver. Any hitch angle offset value is stored 706 in memory, accessed as necessary by the curvature control algorithm, and the calibration module 700 ends 704.
It should be noted that while hitch angle calibration is described above as may be requesting the driver pull forward information, various other methods of hitch angle calibration may also be employed without departing from the scope of the embodiment.
Upon completion of the setup module 600 and the calibration module 700, the activation module 800 may begin. The activation module 800 is described with reference to FIG. 10. The activation module 800 is designed to activate automatic steering of the vehicle during trailer backup assist operations. The driver is instructed 802 to place the vehicle in reverse. Upon activation of the trailer backup assist system, the steering system will not accept any steering angle commands from any source other than the trailer backup assist system 804. The trailer setup with the setup module 600 and calibration with the calibration module 700 must be completed and a current hitch angle must be within a predetermined operating range for the trailer backup assist system 806. The vehicle speed must also be less than a predetermined activation speed 808. In the event any one, or all, of these conditions 804, 806, 808 are not met, the driver is prompted to apply a corrective measure 810. The driver must confirm 814 that the corrective action has been taken in order for the control module to begin. If a corrective action is taken, but the activation module deems it unacceptable, the driver will be instructed 810 to try another corrective action.
For steering systems where the steering wheel is directly coupled to the steered wheels of the vehicle, the driver cannot engage with the steering wheel during trailer backup assist. If any steering wheel motion is obstructed, by the driver or otherwise, the trailer backup assist system will present instructions 810 to the driver to remove their hands from the steering wheel. Activation 800 will be suspended or discontinued until the obstruction is removed. If the vehicle speed exceeds a threshold speed or if the vehicle hitch angle is not acceptable, the driver will be prompted 810 to take corrective action. Until corrective action is taken, accepted and acknowledged, the activation 800 and control 200, 500 modules will be interrupted.
When the driver moves the gear shift from "park" to "reverse" 802 and presses or turns a trailer backup steering input apparatus 125 a rear view camera image may appear in a display of the HMI. If at any time during the reversing process the hitch angle becomes too large for the system to control the curvature of the trailer, the TBA will provide a warning to the driver to pull forward to reduce the hitch angle. If at any time during the reversing process the system is unable to track the hitch angle target, the driver is presented with instructions to correct the problem. If at any time the vehicle speed exceeds that predetermined activation speed, the driver is visually and audibly warned to stop or slow down.
When all of the conditions of the activation module are met and maintained, the control module may begin. The control module executes the directives described above with reference to FIGS. 5 and 7. However, the activation module 800 includes a monitoring function 816 so that, if at any time during execution of the control module 200, 500 the control is interrupted, the driver is instructed to make necessary corrections. In the event any one of the necessary corrections is not made, the control of the vehicle by way of the trailer backup assist system will end. The driver may also intentionally end the control by exiting the system through a menu selection on the HMI or placing the vehicle in a gear setting that is other than park or reverse.
Referring now to instructions processable by a data processing device, it will be understood from the disclosures made herein that methods, processes and/or operations adapted for carrying out trailer backup assist functionality as disclosed herein are tangibly embodied by non-transitory computer readable medium having instructions thereon that are configured for carrying out such functionality. The instructions are tangibly embodied for carrying out the method 200, 600, 700 and 800 disclosed and discussed above and can be further configured for limiting the potential for a jackknife condition such as, for example, by monitoring jackknife angle through use of the equations discussed in reference to FIGS. 5 and 7. The instructions may be accessible by one or more data processing devices from a memory apparatus (e.g. RAM, ROM, virtual memory, hard drive memory, etc.), from an apparatus readable by a drive unit of a data processing system (e.g., a diskette, a compact disk, a tape cartridge, etc.) or both. Accordingly, embodiments of computer readable medium in accordance with the disclosed subject matter include a compact disk, a hard drive, RAM or other type of storage apparatus that has imaged thereon a computer program (i.e., instructions) configured for carrying out trailer backup assist functionality in accordance with the disclosed subject matter.
In a preferred embodiment of the disclosed subject matter, a trailer backup assist control module (e.g., the trailer backup assist control module 120 discussed above in reference to FIG. 1) comprises such a data processing device, such a non-transitory computer readable medium, and such instructions on the computer readable medium for carrying out trailer backup assist functionality (e.g., in accordance with the method 200 discussed above in reference to FIG. 2) and/or the methods 600, 700 and 800 discussed above in reference to FIGS. 9 and 10. To this end, the trailer backup assist control module can comprise various signal interfaces for receiving and outputting signals. For example, a jackknife enabling condition detector can include a device providing hitch angle information and hitch angle calculating logic of the trailer backup assist control module. A trailer backup assist control module in the context of the disclosed subject matter can be any control module of an electronic control system that provides for trailer backup assist control functionality in accordance with the disclosed subject matter. Furthermore, it is disclosed herein that such a control functionality can be implemented within a standalone control module (physically and logically) or can be implemented logically within two or more separate but interconnected control modules (e.g., of an electronic control system of a vehicle) In one example, trailer backup assist control module in accordance with the disclosed subject matter is implemented within a standalone controller unit that provides only trailer backup assist functionality. In another example, trailer backup assist functionality in accordance with the disclosed subject matter is implemented within a standalone controller unit of an electronic control system of a vehicle that provides trailer backup assist functionality as well as one or more other types of system control functionality of a vehicle (e.g., anti-lock brake system functionality, steering power assist functionality, etc.). In still another example, trailer backup assist functionality in accordance with the disclosed subject matter is implemented logically in a distributed manner whereby a plurality of control units, control modules, computers, or the like (e.g., an electronic control system) jointly carry out operations for providing such trailer backup assist functionality.
Trailer Target Placement and Monitoring
The vehicle trailer backup assist system may utilize a target placed on the trailer to serve as the hitch angle detection component 155. In doing so, the trailer backup assist system may employ information acquired via image acquisition and processing of the target for use in the hitch angle detection apparatus 130, according to one embodiment. According to other embodiments, the target may be used to identify if a connected trailer has changed, trailer connection or disconnection, and other trailer related information. The target is an identifiable visual target that can be captured in an image by the video imaging camera and detected and processed via image processing. According to one embodiment, the target may include an adhesive target, also referred to as a sticker, that may be adhered via adhesive on one side onto the trailer, preferably within a target placement zone, such that the camera and image processing may detect the target and its location on the trailer to determine trailer related information, such as the hitch angle between the trailer and the towing vehicle. The trailer backup assist system may provide to the user one or more image(s) of the trailer target zone for proper placement of the target to assist with placement of the target on the trailer. Additionally, the vehicle trailer backup assist system may monitor the target to determine if the target has been correctly placed within a desired target placement zone and provide feedback alert(s) to the user. Further, the trailer backup assist system may monitor the trailer connection by monitoring the target to determine if the target has moved to determine whether the same trailer remains connected to the tow vehicle, and may initiate action in response thereto. Further, the trailer backup assist system may monitor the hitch angle or the target to determine if the trailer may have been changed out (i.e., disconnected and replaced with another trailer), and may initiate action in response thereto.
Referring to FIG. 11, the vehicle trailer backup assist system 105 is shown including the hitch angle detection apparatus 130 and a target monitor controller 10 for monitoring the target, assisting with placement of the target, monitoring connection of the trailer, determining if the trailer has moved, and initiating certain actions. The target monitor controller 10 may include a microprocessor 12 and/or other analog and/or digital circuitry for processing one or more routines. Additionally, the target monitor controller 10 may include memory 14 for storing one or more routines including image processing routine(s) 16, a target placement assist routine 900, a target monitoring routine 920, an initial setup for target moved detection routine 940, a target moved detection routine 960, and a trailer connection monitoring routine 990. It should be appreciated that the target monitor controller 10 may be a standalone dedicated controller or may be a shared controller integrated with other control functions, such as integrated with the hitch angle detection apparatus 130, to process the images of the trailer and target and perform related functionality. In one embodiment, the hitch angle detection apparatus 130 processes the acquired images of the target from the target monitor controller 10 and other information such as trailer length for use in determining the hitch angle between the trailer and the towing vehicle.
A camera 20 is shown as an input for providing video images to the target monitor controller 10 of the vehicle trailer backup assist system 105. The camera 20 may be a rearview camera mounted on the tow vehicle in a position and orientation to acquire images of the trailer towed by the vehicle rearward of the vehicle. The camera 20 may include an imaging camera that generates one or more camera images of the trailer including the region where a target placement zone is expected to be located on the trailer. The camera 20 may include a video imaging camera that repeatedly captures successive images of the trailer for processing by the target monitor controller 10. The target monitor controller 10 processes the one or more images from the camera 20 with one or more image processing routine(s) 16 to identify the target and its location on the trailer. The target monitor controller 10 further processes the processed images in connection with one or more of routines 900, 920, 940, 960 and 990.
The target monitor controller 10 may communicate with one or more devices including vehicle exterior alerts 24 which may include vehicle brake lights and vehicle emergency flashers for providing a visual alert and a vehicle horn for providing an audible alert. Additionally, the target monitor controller may communicate with one or more vehicle human machine interfaces (HMIs) 25 including a vehicle display such as a center stack mounted navigation/entertainment display. Further, the trailer monitor controller 10 may communicate via wireless communication 22 with one or more handheld or portable devices 26, such as one or more smartphones. The portable device 26 may include a display 28 for displaying one or more images and other information to a user. The portable device 26 may display one or more images of the trailer and the target location within a desired target placement zone on display 28. In addition, the portable device 26 may provide feedback information about the vehicle target connection including visual and audible alerts.
Referring to FIGS. 12-15, the placement of the target 30 onto trailer 110 using the target monitor controller 10 processing the target placement assist routine 900 is illustrated according to one exemplary embodiment. In FIGS. 12 and 13, a tow vehicle 100 is shown towing a trailer 110. The trailer 110 has a trailer hitch connector in the form of a coupler assembly 114 connected to a vehicle hitch connector in the form of a receiver hitch and ball 15. The coupler assembly 114 latches onto the hitch ball 15 to provide a pivoting ball joint. The trailer 110 is shown having a frame including a longitudinally extending bar or trailer tongue 112. A top horizontal surface of trailer tongue 112 is shown providing a desired target placement zone 32 for receiving the target 30. It should be appreciated that the trailer 110 may be configured in various shapes and sizes and may offer one or more other suitable target placement zones 32 for receiving the target 30. The target placement zone 32 defines the desired location for placement of the target 30.
The vehicle 100 is equipped with a video imaging camera 20 shown located in an upper region of the vehicle tailgate at the rear of the vehicle 100. The video imaging camera 20 is elevated relative to the target placement zone(s) and has an imaging field of view and is located and oriented to capture one or more images of the trailer 110 including a region containing one or more desired target placement zone(s). It should be appreciated that one or more cameras may be located at other locations on the vehicle 100 to acquire images of the trailer 110 and the target placement zone(s) 32.
In order to utilize a target on a trailer that is not currently equipped with a suitable pre-existing target, a user 2 may be instructed or directed to place the target 30 onto the trailer 110 within a desired target placement zone 32 so that the camera 20 may capture one or more images of the target 30 to determine trailer related information for the trailer backup assist system, such as hitch angle information for the hitch angle detection apparatus 130. In doing so, a user 2 may be prompted by an audible or visual message on an HMI such as the vehicle HMI 25 or portable device 26 to place the target 30 on the trailer 110. The vehicle HMI 25 may include visual and/or audible outputs generating instructions for proper target placement.
To allow for efficient and proper placement of the target 30 onto the trailer 110, the trailer backup assist system employs a target placement assist method or routine 900 shown in FIG. 15 that is processed by the target monitor controller 10. The target placement assist method 900 includes step 902 in which a user may connect a portable device having an image display to communicate with the vehicle. The user may connect the device electronically to the vehicle which can be achieved by way of a wireless protocol, according to one embodiment. The device may be a wireless device that may communicate via Wi-Fi, BLUETOOTH.RTM. or other wireless protocol. Alternatively, the device could be connected via a wired connection. Next, at step 904, the user initiates the hitch angle detection system setup which requires initiating the setup procedure for the hitch angle detection system. As part of this procedure, the user will be required to place a target onto the trailer of the vehicle within a target placement zone. At step 906, the system generates with the camera one or more images of the towed trailer which include a region where the desired target placement zone(s) is expected to be located. There may be more than one target placement zone and one zone may be preferred over another zone. At step 908, the system processes the generated images and determines the desired target placement zone on the trailer. The desired target placement zone may be determined based on camera location and orientation, desired distance of the target from the hitch connection and the physical structure of the trailer. At step 910, the system generates a target overlay on the one or more generated images. The target overlay is a visual indication of the desired location of the target within the target placement zone upon which the user is instructed to place the target. The target overlay may include border lines marking the target placement zone or other identifier. The target overlay may be shown by flashing colored (e.g., red) lines on a displayed image. Target overlays of a plurality target placement zones may be generated and shown. At step 912, the system communicates the one or more images and the target overlay to the vehicle's display and if connected in step 902, the user's display on the portable device by utilizing the wireless or wired connection. Next, at step 914, the user's display on the portable device displays an image of the target placement zone indicated by the target overlay. At step 916, the user is then prompted by an HMI to place the target on the trailer within the target placement zone with assistance from the displayed image and target overlay on the vehicle's display and/or the portable display.
One example of a displayed image on the display 28 of a portable device 26 showing an overlay of the target location for the target to be placed on the trailer is illustrated in FIG. 14. The image displayed on the display 28 includes an image of the trailer 110 as captured by the camera and further includes an overlay of the desired target placement zone 32. The user 2 may view the image on the display 28 of the portable device 26 to determine where to place the target relative to the trailer 110. In this example, the user may place the target 30 onto the target placement zone 32 as indicated by the target overlay. Placement of the target may be achieved by adhering a target sticker onto a surface of the trailer 110. As a result, the user may employ a portable device with a display, such as a phone, a tablet, or a computer to view the proper location for placement of the target on the trailer prior to and during application of the target onto the trailer.
Accordingly, the target placement assist method 900 advantageously assists the user with placement of the target 30 onto the trailer 110 in a manner that is simple to use, accurate and efficient. The user 2 may easily transport a portable device having a display to communicate with the vehicle and view the correct placement location for the target prior to and during the target placement procedure without having to return to the vehicle or otherwise be prompted for target placement.
The trailer backup assist system 105 further includes a target monitoring method or routine for monitoring placement of the target on the trailer and providing feedback to the user as to whether the target has been placed within a proper target placement zone. A user may place a target on the trailer in various ways. In some situations, the user may be prompted by the TBA system via a vehicle HMI to place a target on the trailer and may be given instructions as to the location. The user may employ the target placement assist method 900 to assist with placement of the target on the trailer. In other situations, the user may place the target on the trailer using their best judgment or following instructions printed on the target or packaging provided therewith. In any event, once the target is placed on the trailer, the target monitoring method 920 will monitor the location of the target relative to the trailer and provide feedback to the user as to correct or incorrect placement of the target on the trailer.
The target monitoring method 920 is illustrated in FIG. 16, according to one embodiment. At step 922, method 920 requires attaching the trailer to the vehicle onto the ball and hitch if it is not already attached. Next, at step 924, setup for the hitch angle detection is initiated. At step 926, the user is prompted via an interface to place the target on the trailer. The user may place a target on the trailer based on predefined criteria or the user's best judgment or knowledge, according to one embodiment. The user may be instructed on where to place the target on the trailer by use of a user's manual, an instruction sheet, or other visual or audible communication of instructions, according to other embodiments. Generally, the target should be placed in a region that is unobstructed from view by the camera and that allows for the acquisition of an image and determination of desired trailer related information, such as the hitch angle. Depending on the trailer configuration and camera orientation and height, the target may be required to be placed within a certain region of the trailer, within a distance range from the trailer hitch connection having a minimum distance from the hitch connection, such as 7 inches (17.78 centimeters), within a range from the tow vehicle bumper, and within a range of height from the ground. The target placement may require a location within a certain distance from a centerline of the longitudinal axis of the trailer, and may require a vertical or horizontal angle or some angle in between the vertical and horizontal positions. According to another embodiment, the user may utilize the target placement assist method 900 to place the target on the trailer.
At step 928, the system generates one or more images of the target placement zone on the towed trailer. The system then processes the one or more images to determine the presence of a target within a desired target placement zone at step 930. The desired target placement zone may be determined by criteria, such as distance from the trailer hitch connection formed by the coupler assembly 114, distance from a centerline of the longitudinal axis of the trailer, height of the camera relative to the trailer, and distance of the camera from the trailer. At decision step 932, method 900 determines if the target has been detected by the processed image(s) and, if not, returns to step 926 to prompt the user via an HMI to place the target on the trailer.
If the target has been detected by the processed images, the vehicle trailer backup assist system provides a feedback alert to the user at step 934. The feedback alert may include one or more of vehicle exterior alerts including visual alerts, such as flashing the vehicle brake lights and/or flashing the vehicle emergency flashers, and/or audible alerts, such as sounding the vehicle horn. Additionally, the feedback alerts may include providing a message via the portable device 26, providing an audible tone via the portable device 26 or a visual lighted indication via the portable device 26. Further, feedback alerts may include sending a text message or audible instructions to a user via a portable device, such as a phone or computer. It should be appreciated that other vehicle exterior and alternative feedback alerts may be communicated to the user to indicate that proper placement of the target has been detected on the trailer. Alternatively, the feedback alerts could be used to indicate improper placement of the target on the trailer. Once the trailer is properly equipped with the target in the proper location, the trailer backup assist system may process information by monitoring the target to determine the hitch angle and other trailer towing related functionality.
The target 30 may include a sticker having adhesive on the bottom surface and a predetermined image pattern of a certain size and shape provided on the top surface for capture by the video camera and recognition by the image processing. The target 30 may have a rectangular shape, according to one embodiment, and may have a camera image recognizable pattern such as the checker pattern shown. The image processing may include known image pattern recognition routines for identifying a target pattern and its location on a trailer. However, it should be appreciated that other target shapes, sizes and patterns may be employed. It should further be appreciated that the target may otherwise be connected to the trailer using connectors, such as fasteners, which may connect to the trailer or to an attachment to the trailer. It should further be appreciated that the target can be attached via magnet, glued on, painted on, or any number of other suitable means.
It should be appreciated that not all trailers are necessarily configured to provide a well-suited location for placement of a target sticker on the trailer. Accordingly, a target location may be added to a given trailer by use of a target mounting system 40 as shown in FIGS. 17 and 18, according to one embodiment. The target mounting system 40 is shown installed onto trailer 110 to present a target 30 that is viewable by the camera within a desired target placement zone. The target mounting system 40 includes a vertical mounting post or bracket 44 having a plurality of bolt receiver holes 46 extending vertically to allow for a desired vertical height adjustment. The bracket 44 may be assembled onto the trailer via holes 54 using bolts 48, washers 52 and nuts 50. The height of the bracket 44 may be adjusted depending on which holes 46 are aligned with the trailer holes 54. Mounted to the top of the bracket 44 is a target plate 42 having a top target placement zone 32 onto which the target 30 is located. The plate 42 likewise has a plurality of holes 46 that align horizontally with the holes in the bracket 44 and may be assembled thereto via bolts 48, washers 52 and nuts 50. Accordingly, the plate 42 may be adjusted both vertically and horizontally to a desired position so as place the target 30 adjustably within a desired location so that the target is easily acquired by the camera and processed by the image processing. It should be appreciated that assistance in mounting the target mounting system 40 along with the target 30 and verification of proper location of the target mounting system 40 and target 30 may be achieved by utilizing the target placement assist method 900 and target monitoring method 920 discussed above.
The target moved detection method includes an initial setup routine 940 and subsequent processing routine 960 for target moved detection used for prompting the entry of trailer information. The target moved detection method determines if the location of a hitch angle target on a trailer, such as a trailer tongue, has moved and may also determine if the distance has changed. Images of the target in a previously stored image and a newly acquired image are compared to determine if the location and/or distance to the target has changed. The comparison may include comparing camera image pixel sizes of the images. If either the location or the distance changes, the user is then prompted by an HMI to reenter new trailer information for subsequent processing of the trailer backup assist system.
The initial setup routine 940 is illustrated in FIG. 19. Initially, the trailer must be attached to the vehicle at step 942. At step 944, the attached trailer is setup for hitch angle tracking. For a vision-based system, this may include applying a target sticker to the trailer, such as in the vicinity of the tongue of the trailer, so that the vehicle-based camera can detect motion of the target as the trailer maneuvers and swings around curves. In addition, a number of parameters associated with the location of the target that are used to properly calculate the hitch angle based on the vision processing may be entered. These parameters may include the distance of the target to the ground and the distance from the target to the bumper of the vehicle. At step 946, the vehicle and the trailer are directed to be driven straight, which may be achieved by driving the vehicle and towed trailer in the forward direction. This is to ensure that there is approximately zero hitch angle between the vehicle and trailer with the trailer in-line with the vehicle, and that the image generated in subsequent steps will be taken in the same orientation and will be valid for image comparisons. At step 948, a picture (image) of the target and trailer are acquired with the use of the camera while the vehicle and the trailer are in a straight line at a hitch angle of about zero degrees. At step 950, the image processing performs vision processing on the image. The vision processing may first detect a target and then compute the size and location of the target based on processing the pixels of the image. At step 952, the image acquired in step 948 is stored in memory and the information calculated in step 950 is stored in memory. The image and calculated information are then subsequently used to determine if the target has moved. If the target has moved, the system may assume that the trailer may have been changed or replaced with a different trailer, and hence prompts the user via an HMI to enter trailer information.
Referring to FIG. 20, the target moved detection routine 960 is shown beginning at step 962 in which the driver is instructed to reattach to the vehicle a trailer that was previously set up and used in the initial setup routine 940. At step 964, the user is prompted by the hitch angle detection system to select the trailer that was previously setup and stored, rather than selecting a new trailer. At step 966, the user is prompted to drive the trailer and vehicle combination forward in a straight line to achieve a hitch angle of about zero degrees. Next, at step 968, a new image of the target and the trailer are acquired by the camera. At step 970, vision processing is performed on the image to detect the target and compute the size and location of the target by processing the pixels of the image. At step 972, the target location and size as calculated above are compared to the location and size of the target taken in the prior image from the initial setup. At step 974, a determination is made to determine if the new target information is a match or within tolerance of the original target information. If the newly acquired target is still a similar size and in the similar location on the image as compared to the prior image from the initial setup, then the target is likely to be in the same location and will allow for a proper hitch angle detection if determination of such is made in step 980. If the target has a different location or has a different size, then the target is presumed to have moved and routine 960 proceeds to step 976. Detected movement of the target may occur when the trailer is a different trailer as compared to the trailer last selected by the user. The use of the prior selected trailer configuration may provide erroneous results for hitch angle target tracking. As such, method 960 proceeds to step 978 to prompt the user (e.g., driver) to reselect or re-setup the trailer configuration with new target and trailer information. Accordingly, the target moved detection routine 960 advantageously detects movement of the target which may indicate potential connection of a new trailer to the vehicle, such that the user is prompted via an HMI to select new trailer configuration information. Additionally, the target moved routine could also detect that a target has moved due to a different sized drawbar being installed than what was installed when the trailer was initially setup.
Examples of images of the trailer and the target moved to a different position are illustrated in FIGS. 21A and 21B. As shown in FIG. 21A, an image of the trailer and the target 30 is shown aligned on the trailer in a first position as compared to the subsequent image in FIG. 21B showing the target 30 moved to a new second closer position. The change in location of the target may be an indication that the trailer has been changed out with a new trailer or that the target has otherwise been moved on the trailer. When this occurs, the target move detection routine 960 requires the user to re-enter trailer configuration information so that the wrong information is not used to provide incorrect hitch angle data. Furthermore, it is possible that the right (correct) trailer has been selected and the target is still in the same location on the trailer, but the system still indicates that the target has moved. This could occur if the drawbar length on the vehicle has changed.
Target monitor controller 10 further processes a trailer connection monitoring routine 990 to determine whether a trailer is connected to the vehicle and whether a new trailer may have been connected. When the trailer is disconnected from the vehicle, the target information and the hitch angle information may be unavailable for a period of time. Accordingly, the trailer connection monitoring method 990 monitors the availability of the hitch angle data and/or the detection of the target to determine if the hitch angle data or target data is lost for a substantial period of time. If this occurs, the driver is then prompted via an HMI to reselect the attached trailer or to re-enter trailer configuration data to ensure that the wrong trailer information is not employed.
The trailer connection monitoring routine 990 is illustrated in FIG. 22. At step 992, a trailer is connected to the vehicle. At step 994, the trailer is setup for hitch angle detection and monitoring. If a vision based system is employed, this may include placing a target on the trailer for the vision-based system to detect as well as entering pertinent parameters. Alternatively, if the trailer has been previously setup for hitch angle monitoring, it may be possible to select the previously stored setup configuration for that trailer. At step 996, once the trailer has been setup for hitch angle detection, the hitch angle detection system will continuously monitor the hitch angle or target. At decision step 998, routine 990 determines if the hitch angle or the target has been dropped for a time period greater than X seconds.
Depending on the type of hitch angle system, the hitch angle signal may drop or become unavailable for different reason, but one potential reason is that the trailer has been disconnected from the vehicle. A disconnected trailer may also result in the target detection being unavailable. As such, a check is made to see how much time has expired since the hitch angle signal or target detected has been dropped. If the hitch angle or target detection has been dropped for a time period of less than X seconds, then routine 990 returns to track the hitch angle or target at step 996. If the hitch angle or target detection has been dropped for a time period greater than X seconds, then the user is prompted via an HMI to reselect or re-setup the trailer configuration in step 1000. The time period X is set to represent a reasonable amount of time needed to swap or change-out trailers. For example, for extremely small, lightweight trailers, it may be possible to swap trailers out in less than sixty (60) seconds, so this could be a reasonable time period. According to one embodiment, the time period X is set for thirty (30) seconds.
While the hitch angle is monitored to determine disconnection of a trailer from the vehicle, it should be appreciated that the trailer connection monitoring routine 990 may monitor detection of the target as an alternative, such that if the target is no longer detected for X seconds, then the vehicle driver may be prompted to reselect or reconfigure the trailer.
Secondary Hitch Angle Sensor System
For the trailer backup assist system 105, as previously described, it is advantageous to use information that is representative of an angle between the vehicle and a trailer attached to the vehicle, also known as the hitch angle .gamma. or trailer angle. In addition to the trailer backup assist system 105, it is contemplated that other vehicle systems may utilize hitch angle information as an input to the system, whereby the hitch angle information may be manipulated by a controller or microprocessor associated with the vehicle 100. In some embodiments, a measured hitch angle .gamma.(m) may not provide an accurate measurement of the actual hitch angle .gamma.(a) to a requesting system, which may introduce a potential for inadequate or improper vehicle system control, especially in situations where the hitch angle information may be important to the vehicle system being controlled, such as the trailer backup assist system 105. Furthermore, as previous mentioned, the hitch angle signal may drop-out or become unavailable for different reasons, such as the hitch angle detection apparatus 130 momentarily being unable to sense the relative position of trailer 110, or more specifically, the camera 20 being unable to track the hitch angle target 30 or other hitch sensors, such as a potentiometer, magnetic, optical, or mechanical based sensors, being unable to provide a constant hitch angle measurement, which may similarly cause errors or other disruption in operating the trailer backup assist system 105. Accordingly, an accurate and consistent estimate of the actual hitch angle .gamma.(a) is desired, including for a means to confirm the accuracy of a measured hitch angle .gamma.(m).
Referring to FIGS. 23-25, a sensor system 1200 for estimating a hitch angle of a trailer 110 attached to a vehicle 100 is shown according to one embodiment, which includes a primary sensor 1202 having a camera 20 monitoring a target 30 on the trailer 110 to determine a measured hitch angle .gamma.(m) and a secondary sensor 1204 that monitors the trailer 110 to determine an indicator 1206 of the actual hitch angle .gamma.(a). In this embodiment, the trailer backup assist system 105 operates the vehicle 100 when the measured hitch angle .gamma.(m) correlates with the indicator 1206 of the actual hitch angle .gamma.(a). This and other embodiments of the sensor system 1200 are described in more detail below.
In the embodiment illustrated in FIG. 23, the vehicle 100 is a pickup truck that employs vision based target detection as the primary sensor 1202 to determine the measured hitch angle .gamma.(m). Accordingly, the primary sensor 1202 on the vehicle 100 includes a hitch angle detection apparatus 130 that has a camera 20 as an input for providing video images to a target monitor controller 10 of the primary sensor 1202. The camera 20 (e.g. video imaging camera) is located proximate an upper region of the vehicle tailgate at the rear of the vehicle 100, such that the camera 20 is elevated relative to the target placement zone(s) and has an imaging field of view located and oriented to capture one or more images of the trailer 110, including a region containing one or more desired target placement zone(s) 32. It should be appreciated that the camera 20 may include one or more video imaging cameras and may be located at other locations on the vehicle 100 to acquire images of the trailer 110 and the desired target placement zone(s) 32.
As also shown in FIG. 23, the tow vehicle 100 is pivotally attached to one embodiment of a trailer 110. The trailer 110 has a trailer hitch connector in the form of a coupler assembly 114 connected to a vehicle hitch connector in the form of a receiver hitch and ball 15. The coupler assembly 114 latches onto the hitch ball 15 to provide a pivoting ball joint connection 117. The trailer 110 is shown having a frame 1208 that includes a longitudinally extending bar or trailer tongue 112 that is coupled with opposing front frame members 1210 that angle laterally away from the trailer tongue 112 and extend rearward to couple with side frame members 1212 that extend longitudinally in parallel alignment and are supported by a rotatable wheel axle 1214 of the trailer 110. The forward facing surfaces of the trailer frame 1208, including the trailer tongue 112 and the front and side frame members, 1210, 1212 provide surfaces for the secondary sensor 1204 to monitor the position of the trailer 110. Again, it should be appreciated that the trailer 110 may be configured in various shapes and sizes, may include more than one axle, and may have additional or alternative surfaces for the secondary sensor 1204 (FIG. 24) to monitor.
With further reference to FIG. 23, the vehicle 100 has additional onboard proximity sensors, including but not limited to, a reverse aid system 1220, a blind spot system 1216, and a cross traffic alert system 1218. In one embodiment, the reverse aid system 1220 includes a pair of energy transducers coupled with the rear of the vehicle 100 below the vehicle tailgate on opposing sides of the pivoting ball joint connection 117 between the vehicle 100 and the trailer 110. The energy transducers of the reverse aid system 1220, in the illustrated embodiment, comprise ultrasonic sensors that are directed rearward in the general vicinity of the trailer 110 for monitoring the position of the trailer 110 by measuring a difference in return signals from the ultrasonic sensors on opposing sides of the pivoting ball joint connection 117. The difference in the return signals is used to determine the indicator 1206 (FIG. 24) of the actual hitch angle .gamma.(a). The indicator 1206 may be a second measured hitch angle .gamma.(m2), which can be used to define an acceptable tolerance range of hitch angles. The indicator 1206 may also be another conceivable type of indicator, as described in further detail herein. The reverse aid system 1220 may include additional sensors, including other types of sensors, such as radar sensors, located at several locations at the rear of the vehicle 100, such as laterally spaced along the bumper.
The blind spot system 1216, according to one embodiment shown in FIG. 23, includes an energy transducer 1222 coupled with each of the side rear view mirrors that generate a sensor field adjacent to the sides of the vehicle 100 and rearward therefrom in the general vicinity of the trailer 110. The energy transducers 1222 of the blind spot system 1216 may be ultrasonic sensors that monitor the general position of the trailer 110 to determine an indicator 1206 of the actual hitch angle .gamma.(a). Accordingly, it is conceivable that the blind spot system 1216 may be used to determine when the trailer 110 is roughly centered behind the vehicle 100 or in line with the vehicle 100 when the return signals from both energy transducers 1222 are both low and/or relatively equal. Also, the blind spot system 1216 may provide an indicator 1206 (FIG. 24) of the actual hitch angle .gamma.(a) based on the magnitude of return signal from the respective energy transducer 1222 receiving the greater return signal. For instance, a set of ranges of ascending magnitudes may be set to correspond with a general hitch angle (e.g. 10-20 Hz for 5 degrees, 20-30 Hz for 10 degrees, etc.) or ranges of hitch angles (e.g. 0-40 degrees, 40-70 degrees, 70-100 degrees), such that the return signal may be an indicator 1206 (FIG. 24) of the actual hitch angle .gamma.(a) for use with the sensor system 1200 or for use as a primary sensor 1202 in an alternative embodiment.
The cross traffic alert system 1218, as shown in FIG. 23, also incorporates energy transducers 1224 on the rear of the vehicle 100 to generate sensor fields for monitoring the general position of the trailer. Specifically, the cross traffic alert system 1218 in the illustrated embodiment includes energy transducers 1224 comprising a pair of ultrasonic sensors directed rearward and laterally outward from the rear of the vehicle 100, such that the ultrasonic sensors may determine when the trailer 110 has reached a large hitch angle or is approaching a critical angle indicative of a jackknife condition or jackknife angle .gamma.(j). In addition, the secondary sensor 1204 may comprise an auxiliary hitch angle sensor 1226 (FIG. 24) attached to the trailer 110 and/or the vehicle 100, such as mechanical sensor mechanisms or other conceivable hitch angle sensors. It is also contemplated that any of the onboard proximity sensors (FIG. 26), including, but not limited to, the reverse aid system 1220, blind spot system 1216, the cross traffic alert system 1218, and the auxiliary sensor 1226, may have an ultrasonic sensor, a radar sensor, or a combination of the two. These secondary sensors 1204 for determining the position of the target 30 may also include other cameras located on the vehicle, cameras located on the trailer, or other sensing devices generally understood by one having ordinary skill in the art. It is also conceivable that more than one onboard sensor system may be incorporated into the secondary sensor 1204, offering multiple individual sensors that contribute to the indicator 1206 of the actual hitch angle .gamma.(a).
Referring to FIG. 24, the sensor system 1200 of the trailer backup assist system 105 (FIG. 1) has the primary sensor 1202 for determining a first measured hitch angle .gamma.(m) and the secondary sensor 1204 for determining an indicator 1206 of the actual hitch angle .gamma.(a), such as a second measured hitch angle .gamma.(m2). In one embodiment, the secondary sensor 1204 may be used in place of the primary sensor 1202 when the signal of the first measured hitch angle .gamma.(m) becomes unavailable or unreliable, thereby using the second measured hitch angle .gamma.(m2) in place of the first measured hitch angle .gamma.(m). Additionally or alternatively, the secondary sensor 1204 may be used in conjunction with the primary sensor 1202 to confirm that the first measured hitch angle .gamma.(m) correlates with the indicator 1206 of the actual hitch angle .gamma.(a). In one embodiment, as described above, the primary sensor 1202 may include the hitch angle detection apparatus 130 and the target monitor controller 10 for monitoring the target 30 on trailer 110 to determine the first measured hitch angle .gamma.(m). The secondary sensor 1204 includes a trailer monitoring apparatus 1228 and a trailer monitoring controller 1230 for monitoring the trailer 110 to determine the indicator 1206 of the actual hitch angle .gamma.(a). The trailer monitoring controller 1230 may include a microprocessor 1232 and/or other analog and/or digital circuitry for processing one or more routines. Also, the trailer monitoring controller 1230 may include memory 1234 for storing one or more routines including sensor signal processing routines 1236 and hitch angle confirmation routines 1238. It should be appreciated that the trailer monitoring controller 1230 may be a standalone dedicated controller or may be a shared controller integrated with other control functions, such as integrated with the trailer monitoring apparatus 1228 and/or the primary sensor 1202, to process the return signals of the onboard proximity sensors or other secondary sensors and perform related functionality.
The trailer monitoring controller 1230 illustrated in FIG. 24 receives and processes return signals from at least one of the camera 20, the blind spot system 1216, the reverse aid system 1220, the cross traffic alert system 1218, and the auxiliary hitch angle sensor 1226, which may include additional processing from the trailer monitoring apparatus 1228. The secondary sensor 1204 processes the return signals to determine the indicator 1206 of the actual hitch angle .gamma.(a), such as using the reverse aid system 1220 to determine a second measured hitch angle .gamma.(m2) as the indicator 1206 and/or using the blind spot system 1216 to determine a range of hitch angles as the indicator 1206. The hitch angle confirmation routine 1238 further processes the indicator 1206 in connection with the first measured hitch angle .gamma.(m) to determine if the first measured hitch angle .gamma.(m) correlates with the indicator 1206. For instance, the indicator 1206 may include the second measured hitch angle .gamma.(m2) that defines a tolerance range of acceptable hitch angles (e.g. +/-3 degrees of the second measured hitch angle, or a wider or narrower tolerance range), such that the first measured hitch angle .gamma.(m) correlates with the indicator 1206 when the first measured hitch angle .gamma.(m) is within the tolerance range. It is contemplated that in one exemplary embodiment, the hitch angle confirmation routine 1238 may also process the first measured hitch angle .gamma.(m) to define an average measurement thereof over an interval of time (e.g. 2 seconds, or a longer or shorter interval) to reduce instability and variance of the first measured hitch angle .gamma.(m).
As also illustrated in FIG. 24, the sensor system 1200 may communicate with one or more devices including, the vehicle HMI 25, the vehicle exterior alerts 24, and the vehicle interior alerts 1240, which may include a blind spot indicator light 1242 that provides a visual alert. It is contemplated that the blind spot indicator light 1242 may be on an interior or exterior of the vehicle 100, such as on or proximate a side rear view mirror, to alert the driver that the primary sensor 1202 does not correlate with the indicator 1206 of the actual hitch angle .gamma.(a), the trailer 110 is approaching or is in a jackknife condition, or other conceivable warnings that may not be able to be displayed on the center stack screen when reversing the vehicle 100. Additional warnings that may be provided with the blind spot indicator light 1242 include overspeed warning that alerts the driver that they are approaching a speed greater than the speed configured for operating the trailer backup assist system 105, a steering override warning that alerts the driver that steering has exceeded the acceptable steering torque configured for operating the trailer backup assist system 105, or an internal fault warning that alerts the driver that the trailer backup assist system 105 has become inoperative and has to canceled out for other conceivable errors. As previously described, the sensor system 1200 may communicate via wireless communication 22 to various types of mobile devices or via onboard communication to one or more vehicle human machine interfaces (HMIs) 25, including a vehicle display, such as a center stack mounted navigation/entertainment display.
The method for estimating the actual hitch angle .gamma.(a) using the sensor system 1200 of the trailer backup assist system 105 is illustrated in FIG. 25 according to one embodiment. Initially, at step 202 the system may receive an initiation request to activate the trailer backup assist system 105 for tracking the hitch angle. Before proceeding to monitor the hitch angle, at step 1244 the system confirms that the attached trailer 110 has been calibrated and setup for operation with the trailer backup assist system 105, and if not, the calibration and setup process 600, 700 are initiated, as previously described. Although the calibration and setup processes 600, 700 may involve gathering the kinematic information for the attached trailer 110, at step 1246, the sensor system receives this information for use with the primary and/or secondary sensors 1202, 1204, if necessary. For instance, if a vision based target detection system is included as the primary sensor 1202, the kinematic information will provide parameters from the target setup information in addition to the input or otherwise determined dimensions of the trailer 110. The trailer kinematic information may also be used by the sensor system 1200 to modify the tolerance range of acceptable first measured hitch angles and to modify the magnitudes of sensor return signals or corresponding ranges of hitch angles.
Still referring to FIG. 25, once the trailer backup assist system 105 is generally setup and calibrated with the trailer 110 attached to the vehicle 100, at step 1248, an input is made with the input device, such as selecting the desired hitch angle between the vehicle 100 and trailer 110 by manipulating the steering input apparatus 125, as previously described. At step 1250, the sensor system 1200 begins to monitor the trailer 110 with the primary sensor 1202 to determine the first measured hitch angle .gamma.(m) at step 1252. In conjunction with the operation of the primary sensor, at step 1254, the secondary sensor similarly monitors the trailer 110 to determine the indicator 1206 of the actual hitch angle .gamma.(a) at step 1256. At step 1258, the first measured hitch angle .gamma.(m) is compared with the indicator 1206 to determine if the measured hitch angle .gamma.(m) of the primary sensor 1202 correlates therewith, and if so, thereby reflecting a generally accurate measurement of the actual hitch angle .gamma.(a). If the measured hitch angle .gamma.(m) is determined to not correlate with the indicator 1206, the user may be prompted at step 1260, such as being alerted with any of the interior or exterior alerts 1240, 24, being alerted and/or requested with the vehicle HMI to direct whether the trailer backup assist system 105 should proceed to operate the vehicle 100, and similarly being alerted and/or prompted with a mobile device via wireless communication 22, as described above. If the measured hitch angle .gamma.(m) of the primary sensor 1202 correlates with the indicator 1206 of the actual hitch angle .gamma.(a), then, at step 1262, the trailer backup assist system 105 may operate to achieve the desired input made with the input device, such as steering the vehicle 100 with the power-steering assist system 115 to achieve the desired hitch angle input with the steering input apparatus 125.
While the illustrated embodiment of the sensor system 1200 includes a primary sensor 1202 and a secondary sensor 1204, it should be appreciated that the sensor system 1200 may include addition sensors (tertiary sensor, quaternary sensor, etc.) with additional corresponding indicators for confirming the accuracy of the indicator 1206 from the secondary sensor 1204 and the measured angle .gamma.(m) from the primary sensor 1202. It is also be understood that the sensor system 1200 may additionally, or alternatively, be adapted for use with other vehicle related applications, such as trailer sway limiters or other conceivable applications relying upon the accuracy of the measured hitch angle .gamma.(m).
Hitch Angle Estimation and Verification
According to an additional embodiment for estimating the actual hitch angle, a system uses an estimated distance between a wireless receiver on the vehicle and a wireless transmitter on the trailer. The wireless receiver on the vehicle is located at a predetermined distance from a trailer mount and the wireless transmitter on the trailer is located at an end of the trailer opposite the trailer mount. With respect to this embodiment, the system includes a controller for monitoring power returns of a signal transmitted from the transmitter to the receiver and for estimating the distance between the transmitter and the receiver as a function of a path loss propagation of the transmitted signal. The actual hitch angle is then estimated using the estimated distance, the predetermined distance, and a trailer length.
Referring now to FIGS. 26-28, one embodiment the system for estimating the actual hitch angle is shown to include a wireless receiver 1270 on a vehicle 100 with a trailer backup assist system 105. The wireless receiver 1270 is mounted at a known vehicle location, such as a central vehicle body position. In the illustrated embodiment, the vehicle 100 also has a controller 1272 for receiving information from the wireless receiver 1270, which may be a single centralized vehicle controller or a combination of controllers. The controller 1272 may be programmed to perform various functions and control various outputs and may have a memory 1274 associated therewith. The memory 1274 may store various parameters, thresholds, patterns, tables, or maps; for example, parameters may include known, fixed vehicle measurements such as wheel base, vehicle length, trailer length and distances from known parts of the vehicle. The controller 1272 receives information from a number of sensors on or around the vehicle 100 associated with one or more sensing systems 1276, which may include, but are not limited to, speed sensors, yaw rate sensor, lateral acceleration sensor, roll rate sensor, vertical acceleration sensor, a longitudinal acceleration sensor, a pitch rate sensor, and a steering angle position sensor. These sensors may also be part of an inertial measurement unit that would most likely be located at the center of the vehicle body.
As shown in FIGS. 26-27, a trailer 110 may be towed behind the vehicle 100. The trailer 110 may include a tongue 112 and trailer wheels, as well as a trailer brake and electrical components such as lights. A wiring harness 1278 may be used to couple the trailer 110 to the electrical system of the vehicle 100 and ultimately to the controller 1272. The trailer 110 is coupled to the vehicle 100, as by a hitch ball 15 or other mount on the vehicle 100, through a coupler assembly 114 located at the end of the trailer tongue 112. A distance d.sub.r defines a reference distance which is the distance between the wireless receiver 1270 on the vehicle 100 and the hitch ball 15 or other mount on the vehicle 100. This is a fixed distance and may be stored in memory 1274. The coupler assembly 114 may have a hitch angle sensor 1226 associated therewith. Alternatively, the hitch angle sensor 1226 may be associated with the mount on the vehicle 100. The hitch angle sensor 1226 is used to determine the angle position of the trailer 110 relative to the vehicle 100. Various types of hitch angle sensors, such as resistive, inductive, ultrasonic, or capacitive type sensors may be used, in addition to other hitch angle sensor system disclosed herein.
A wireless transmitter 1280 is positioned on the trailer 110 at a known location, preferably at the end of the trailer. This wireless transmitter 1280 is in communication with the wireless receiver 1270 that is located on the vehicle 100. The wireless receiver 1270 has been placed at a known location of the vehicle 100 such that a reference distance, d.sub.r, from the receiver 1270 to the hitch ball 15 at the rear of the vehicle 100 is known and stored in memory 1274. Examples of wireless transmitting and receiving devices that may be used are Radio Frequency Identification (RFID), Bluetooth, and the like. As discussed above, the wireless receiver 1270 is positioned at a location on the vehicle 100 the predetermined distance, d.sub.r, from the vehicle's trailer mount or hitch ball 15. The wireless transmitter 1280 and the wireless receiver 1270 are compatible units that transmit and receive signals between the vehicle 100 and the trailer 110. The controller 1272 monitors the power returns of the transmitted signals. By monitoring the power returns of signals sent by the transmitter to the receiver, the controller 1272 may estimate a distance, d, between the vehicle 100 and the trailer 110.
The disclosed subject matter also uses a trailer length, l.sub.T. This value may be a known value entered by the driver, stored in controller memory, or otherwise sensed, calculated or estimated. For example, an accurate estimate of trailer length, l.sub.T, is possible using measurements of the signal transmitted from the wireless transmitter 1280 on the trailer 110 to the wireless receiver 1270 on the vehicle 100 when the hitch angle is zero. It is also possible to estimate the trailer length when the measurements are taken while the vehicle yaw rate is zero for a predetermined period of time.
The hitch angle is thereby estimated using the trailer length, l.sub.T, and path loss propagation of a signal transmitted from the transmitter on the trailer 110 to the receiver 1270 on the vehicle 100. The hitch angle estimate may then be used as an input for control algorithms associated with a variety of vehicle systems 1281 such as trailer sway, trailer backup assist, stability control and other systems. Alternatively, the hitch angle estimate may be used to verify, or validate, the measurement taken by a hitch angle sensor.
Referring to FIG. 27, a block diagram of a vehicle 100 and trailer 110 combination, where a hitch angle is non-zero, is shown with respect to the law of cosines: A.sup.2=B.sup.2+C.sup.2-2BC cos(a)
The vehicle 100 has the trailer 110 attached thereto with the receiver 1270 located on the vehicle a predetermined reference distance, d.sub.r from the trailer hitch ball 15, which corresponds to B for the triangle reflecting the law of cosines in FIG. 27. The trailer length, l.sub.T, is shown and the transmitter 1280 is located at the end of the trailer 110. The trailer length, l.sub.T, corresponds to C in the law of cosines. The distance, d, between the transmitter 1280 and the receiver 1270 is shown, which corresponds to A in the law of cosines. The reference distance, d.sub.r, is a known distance that may be stored in memory 1274. The trailer length, l.sub.T, may also be a known distance that is stored in memory 1274 or it may be estimated or calculated as described later herein. The distance, d, is calculated as described hereinafter with reference to FIG. 28.
Referring to FIG. 28, a flow chart of the method 1282 for estimating a hitch angle in accordance with the disclosed subject matter is shown. The method 1282 can be carried out using the vehicle and trailer architecture discussed above in reference to the vehicle 100 and trailer 110 for FIG. 26. Accordingly the hitch angle estimate may be supplied to any vehicle system 1281 requesting the information.
An operation 1284 is performed for requesting hitch angle estimation. A request for hitch angle estimation may come from a vehicle control system 1281 that requires the information as an input to the control algorithm associated therewith or it may come from a control system 1281 that wants to validate or verify a hitch angle provided by a hitch angle sensor. Examples of vehicle control systems 1281 that may request hitch angle information may be a trailer backup assist system 105, a trailer sway control system, a trailer brake control system, and a vehicle dynamic control system such as roll stability control or yaw stability control. These are only a few examples of systems 1281 that may utilize hitch angle information as an input to a control algorithm.
An operation 1286 is performed to monitor power returns of signals transmitted from the trailer 110 to the vehicle 100. Path loss is proportional to the square of the distance between the transmitter and the receiver and power returns of signals transmitted may be used to estimate a distance between the transmitter and the receiver. The power returns are measured, at the receiver, at predetermined time intervals and stored in controller memory over a predetermined period of time. The power returns may be accessed by the controller for various operations and/or functions that use the values to estimate hitch angle.
An operation 1288 is performed to estimate the distance, d, between the transmitter and the receiver. Estimating the distance, d, between the wireless transmitter and the wireless receiver 1270 is accomplished by using the, measured power returns or measured path loss of the signal being transmitted. Path loss is proportional to the square of the distance between the transmitter and the receiver, and also to the square of the frequency of the transmitted signal. Signal propagation may be represented by Friis transmission formula:
.function..times..times..times..lamda..times..times..pi..times..times. ##EQU00003##
where,
P.sub.t is the transmission power in Watts,
G.sub.t and G.sub.r are gains associated with the receiver and the transmitter respectively,
.lamda. is the wavelength,
L are system losses, and
d is the distance between the transmitter and the receiver.
Accordingly, transmission power decreases at a rate proportional to d.sup.2. Therefore, knowing the path loss, PL, associated with the transmitted signal will provide an estimate of the distance, d, between the transmitter and the receiver. Path loss (PL) is represented by the following equations:
.times..times..times..times..times..function..times..times..lamda..times.- .times..pi..times..times. ##EQU00004## .times..times..function..times..times..lamda..times..times..pi..times..ti- mes..times..function. ##EQU00004.2## .times..times..function..times..times..lamda..times..times..pi..times..ti- mes..times..function. ##EQU00004.3##
P.sub.r decreases at a rate that is proportional to d.sup.2. The power of the signal received at the receiver may be represented as:
.function..function..times..times..times..times..times.>> ##EQU00005##
The distance, d, may be derived from this formula and represents the overall distance between the transmitter on the trailer and the receiver on the vehicle. The distance, d.sub.0, is a known received power reference point and the distance, d.sub.f, is a far-field distance.
The reference distance, d.sub.r, is known. If the trailer length, l.sub.T is known, then an operation 1289, using the distance, d, the trailer length, l.sub.T, the known reference distance, d.sub.r, between the receiver and the trailer hitch, and the law of cosines, is performed to calculate the hitch angle. From the law of cosines, provided above, the hitch angle is given by:
.function..times..times. ##EQU00006##
An operation 1290 is performed in which the vehicle system that is requesting the information receives the hitch angle estimation. The disclosed subject matter provides an estimate of hitch angle even when a hitch angle sensor is unavailable. If a system relies on a hitch angle sensor, the disclosed subject matter may provide verification, as a redundant sensor, that the hitch angle sensor is operating properly.
As discussed above, the trailer length, l.sub.T, may be a known value stored in memory or it may be a value that is calculated according to the disclosed subject matter. The trailer length may be calculated 1292 by comparing distances, d, between the transmitter and the receiver that have been estimated and stored in memory over a period of time. A predetermined number of distance estimates may be stored in controller memory. A comparison of the stored distances may result in a largest distance may be identified. The largest distance estimate may be associated with a zero hitch angle. This identified largest distance, less the known reference distance, d.sub.r will be representative of, and may be stored as, the trailer length, l.sub.T.
As an alternative, the trailer length, l.sub.T, may be estimated using a yaw rate provided by a yaw rate sensor on the vehicle to determine when the trailer is a zero hitch angle. A yaw rate sensor is typically available as part of the sensor system 1200 on the vehicle. A zero yaw rate is an indicator that a vehicle is travelling along a straight path, i.e., the vehicle is not turning. The fact that the yaw rate is zero alone is not adequate to identify a zero hitch angle because the vehicle may have just stopped turning even though a non-zero hitch angle exists. However, monitoring yaw rate over time will provide confirmation that the vehicle has driven straight forward for a sufficient predetermined period of time while maintaining a zero or near zero yaw rate. A zero yaw rate, sensed over time, provides an indication that the trailer has straightened out and it can be inferred that the hitch angle is zero at that point. Upon verification of zero hitch angle, the operation to calculate trailer length 1292 is performed. The estimated distance between the transmitter and the receiver when the hitch angle is zero less the predetermined distance, d.sub.r, defines the trailer length, l.sub.T.
The predetermined period of time that the yaw rate should remain at zero before the assumption that the hitch angle is zero will be associated with an actual distance the vehicle trailer combination needs to travel to ensure that the hitch angle is zero. This may be determined through testing and stored in the controller memory.
The disclosed subject matter is advantageous in that it provides an estimate of hitch angle whether or not a hitch angle sensor is present on a vehicle. The disclosed subject matter is even advantageous for a vehicle that has a hitch angle sensor in that it provides a method for verifying, or validating, the accuracy of a hitch angle sensed by a hitch angle sensor. This is especially important for vehicle systems that rely critically on the value of the hitch angle being sensed, for example, trailer backup assist systems, trailer sway control systems and trailer brake control systems.
Hitch Angle Calibration
As previously mentioned with reference to FIG. 8 and a driver's interaction with the human machine interface (HMI) device 102, after the trailer setup module 600 is complete at step 620, the calibration module 700, according to one embodiment, calibrates the curvature control algorithm with the proper trailer measurements and calibrates the trailer backup assist system for any hitch angle offset that may be present. In the one embodiment, the calibration module 700 may instruct the driver to pull the vehicle-trailer combination straightforward until a hitch angle sensor calibration is complete, which may be notified to the driver via the HMI device 102. Depending on any error resulting from the trailer measurements or the potential inability of the vehicle to be pulled straight forward, additional and alternative embodiments of calibrating the trailer backup assist system are described herein.
With reference to FIG. 29, the vehicle trailer backup assist system 105 is illustrated having the trailer backup assist control module 120 in communication with the sensor system 1200 and the trailer backup steering input apparatus 125 as part of the trailer backup assist system 105. The trailer backup assist system 105 in the illustrated embodiment, receives sensor information from the one or more hitch angle sensors 1312, a vehicle yaw rate sensor 1314, and a vehicle speed sensor 1316, and may communicate with other conceivable sensors on the vehicle 100 or trailer 110. For instance, the illustrated embodiment of the trailer backup assist system 105 also communicates with the vehicle transmission controller 1318, such as receiving the presently engaged transmission gear. Furthermore, the trailer backup assist control module 120 is also in direct communication with the power steering assist system 115, which has the power steering assist control module 135 for communicating with the steering angle detection apparatus 140 and a servo steering motor 1300, or servomotor, for operating the steered wheels 1302 of the towing vehicle 100 (FIG. 30). The illustrated embodiment of the trailer backup assist control module 120 includes a microprocessor 1304 for processing one or more routines stored in the corresponding memory 1306 of the trailer backup assist control module 120. The memory in one embodiment includes a hitch angle calibration routine 1308 and an initiating routine 1310. It should be appreciated that the trailer backup assist control module 120 may be a standalone dedicated controller or may be a shared controller integrated with other control functions, such as integrated with the sensor system 1200, the trailer backup steering input apparatus 125, or other systems of the towing vehicle.
As shown in FIG. 30, a schematic illustration of the vehicle 100 and trailer 110 combination are overlaid with an x-y coordinate system showing kinematic variables and angles, including the steering angle .delta., trailer length D, and hitch angle .gamma., which may be affected by the dynamics of the vehicle 100 and trailer 110 combination and representable in kinematic equations, as similarly discussed with reference to FIG. 5.
Referring to FIGS. 31-32, a method is shown for estimating the actual hitch angle .gamma.(a) between the vehicle 100 and the trailer 110, according to one embodiment. The method provides for sensing a measured hitch angle .gamma.(m) with at least one hitch angle sensor 1312 (FIG. 29) on the vehicle 100 and sensing a steering angle .delta. of the steered wheels 1302 (FIG. 30) of the vehicle 100. Further, the method provides for reversing the vehicle 100, and thereby determining an offset .gamma.(o) between the measured hitch angle .gamma.(m) and the actual hitch angle .gamma.(a) when the measured hitch angle .gamma.(m) and the steering angle .delta. are substantially constant while the vehicle 100 is reversing.
As reflected in the diagram shown in FIG. 30, when the hitch angle .gamma. and steering angle .delta. are substantially constant, the yaw rate of the vehicle 100 is also substantially constant and equal to the yaw rate of the trailer 110. This interaction is used to formulate kinematic equations that can be solved for determining the offset .gamma.(o) between the measured hitch angle .gamma.(m) and the actual hitch angle .gamma.(a). Specifically, the yaw rate of the vehicle 100, as measured by the vehicle yaw rate sensor 1314 (FIG. 29) or another conceivable onboard vehicle sensor that may be configured to sense the yaw rate, provides the following equation:
.times..times..alpha..times..times..times..delta. ##EQU00007##
Furthermore, the yaw rate of the trailer can be represented with the following equation:
.times..times..beta..times..times..times..gamma..times..times..times..gam- ma..times..times..times..times..delta. ##EQU00008##
Where,
.delta. is the steering angle of the front wheels
D is the distance from the hitch to the trailer axle
W is the vehicle wheelbase (distance between both axles)
L is the distance from the vehicle rear axle and hitch
.gamma. is the hitch angle
Accordingly, when the yaw rate of the vehicle 100 and the trailer 110 become equal, the actual hitch angle .gamma.(a) will likely be constant, such that the desired hitch angle provided by the trail backup steering input apparatus 125, such as the previously described rotatable input control device shown in FIG. 2, is also constant and substantially achieved. For example, the desired hitch angle received from the trailer backup steering input apparatus 125 may be constant when the driver attempts to reverse the trailer 110 in a straight line with the vehicle 100 (i.e. a zero curvature command) or when the driver inputs a maximum knob angle command. The resulting constant hitch angle results in the following equation: c=a cos .gamma.+b sin .gamma.
This equation can be rewritten as follows: c=a {square root over (1-sin.sup.2 .gamma.)}+b sin .gamma.
The above equation can be solved with the quadratic equation that solves for the hitch angle .gamma.. Thereafter, when breaking up the hitch angle .gamma. into a measured hitch angle .gamma.(m) and an offset angle .gamma.(o), the equation can be rewritten as follows:
.gamma..times..times..times..+-..times..gamma. ##EQU00009## .times..times..times..times..delta. ##EQU00009.2## ##EQU00009.3## .times..times..times..delta. ##EQU00009.4##
Accordingly, the hitch angle offset .gamma.(o) may be determined as a function of the length D of the trailer 110, the wheelbase length W of the vehicle 100, and the distance L from a rear axle of the vehicle 100 to the trailer 110 as shown in FIG. 30, while meeting the conditions provided above to use such an equation. Specifically, the conditions generally include that the vehicle 100 and trailer 110 are reversing and that the measured hitch angle .gamma.(m) and the steering angle .delta. are substantially constant during the reversing motion for at least a threshold period of time or over a threshold distance of motion.
As illustrated in FIG. 31, the calibration module 700 processes one embodiment of the hitch angle calibration routine 1308 to provide the method according to the following steps. At step 1320, the system receives generally fixed characteristics of the vehicle 100 and the trailer 110, including the trailer length D, the vehicle wheelbase length W, and the distance L from the vehicle's rear axle to the hitch connection. These generally fixed characteristics are described as such because the vehicle 100 and trailer 110 dimensions can be preloaded or looked up in product specifications, and if these dimensions are not known or otherwise already determined by the system, they can be measured and input into the memory 1306 or other vehicle memory prior to operating the vehicle 100 with the trailer backup assist system 105. The hitch angle calibration routine 1308 shown in FIG. 31, also provides at step 1322, confirming that the vehicle 100 is reversing when the sensors of the sensor system 1200 are taking continuous measurements of the vehicle 100 and trailer 110 variables. Specifically, the system may confirm that the vehicle 100 is reversing with use of directional speed sensors, the gear position of the transmission controller 1318, GPS inputs, or other conceivable indicators of vehicle 100 direction.
At step 1324, the system conducts the initiating routine 1310 to further confirm that the vehicle 100 and trailer 110 combination is in a condition to determine the offset .gamma.(o) between the measured hitch angle .gamma.(m) and the actual hitch angle .gamma.(a). As shown in FIG. 32, one embodiment of the initiating routine 1310 includes determining a compensated wheel steer angle 1326, calculating a filtered wheel steer angle rate 1328, and then determining at step 1330 whether the filtered wheel steer angle rate is less than a maximum allowable steering angle rate for the offset calculation. Also, the initiating routine 1310 takes the measured trailer angle .gamma.(m) at step 1332 and calculates a filtered trailer angle rate over time at step 1334. The initiating routine then at step 1336 determines whether the filtered trailer angle rate is less than a maximum allowable trailer angle rate for determining the offset calculation. Further, the initiating routine 1310 takes the sensed or otherwise calculated vehicle speed from step 1338 and further calculates a filtered vehicle speed at step 1340. The filtered vehicle speed is then processed at step 1342 to determine whether it is less than a maximum allowable vehicle speed for determining the offset calculation. If the conditions of the initiating routine 1310 are met at step 1344, the trailer backup assist system 105 allows the hitch angle calibration routine 1308 to continue towards determining the offset .gamma.(o).
With further reference to FIG. 31, when the initiating routine 1310 is complete, the hitch angle calibration routine at step 1346 determines whether the hitch angle rate and the steering angle rate are both substantially zero, or alternatively stated, whether the hitch angle and the steering angles are substantially constant. If the hitch angle rate and the steering angle rate are both not substantially zero, the hitch angle calibration routine 1308 continues to conduct the initiating routine 1310 at step 1324 and continues to take measurements with the sensor system 1200 until the hitch angle rate and steering angle rate are substantially zero. Once they are both substantially zero, the hitch angle calibration routine 1308 then determines the actual hitch angle at step 1348 based on the vehicle 100 and trailer 110 generally fixed characteristics, as identified in the equations above. With the actual hitch angle .gamma.(a), the hitch angle calibration routine 1308 may then determine the offset .gamma.(o) between the actual hitch angle .gamma.(a) and the measured hitch angle .gamma.(m) at step 1350. Upon determination of the offset .gamma.(o), the calibration module is complete and the trailer backup assist system 105 may proceed for operation.
In an additional embodiment of the hitch angle calibration routine 1308, as illustrated in FIG. 33, a method is provided for calibrating the trailer backup assist system 105 for the trailer 110 attached to the vehicle 100, which provides driving the vehicle 100 forward substantially straight above a threshold speed. The method also provides sensing a yaw rate of the vehicle 100 and sensing a measured hitch angle .gamma.(m) of the trailer 110. Further, the method provides for determining an angle rate based on the measured hitch angle .gamma.(m), and then determining an offset .gamma.(o) between the measured hitch angle .gamma.(m) and the actual hitch angle .gamma.(a) when the yaw rate and the angle rate are substantially zero.
In the previously described embodiment of the hitch angle calibration routine 1308 with reference to FIG. 31, the vehicle 100 is reversing and therefore such an embodiment is configured for situations when the vehicle 100 may not be able to drive forward far enough to calibrate the trailer backup assist system 105. However, when space is available to drive the vehicle 100 forward, an alternative method may be used to determine the offset .gamma.(o) between the actual hitch angle .gamma.(a) and the measured hitch angle .gamma.(m) that does not rely upon the accuracy of the measured or otherwise determined trailer geometry and dimensions. Specifically, when setting up the trailer 110 with the vehicle 100, in one embodiment, the user may be instructed to measure various dimensions of the trailer 110, including the trailer length D. The dimensions of the vehicle 100, however, may be measured with a high degree of accuracy upon assembly of the vehicle or otherwise supplied in an accurate manner to the trailer backup assist system 105, such as with a hookup table provided by the vehicle manufacture.
With reference to FIG. 33, at step 700 the trailer backup assist system 105 again begins to calibrate the system for the trailer 110 attached to the vehicle 100. At step 1352, the system receives the vehicle characteristic including the dimensions of the vehicle 100 and the operating characteristics, such as the present gear of the transmission. Then at step 1354, the system confirms that the vehicle is driving forward while the sensors of the sensor system 1200 take measurements and other readings. Notably, in this illustrated embodiment, the sensors utilized include a sensor for determining the vehicle yaw rate, such as an onboard yaw rate sensor 1314 or a separate sensor configured to determine the yaw rate of the vehicle. Also, the sensors being utilized by this embodiment of the hitch angle calibration routine include at least one hitch angle sensor 1312, as previously described with reference to the sensor system 1200.
Still referring to FIG. 33, at step 1356, the steered wheels 1302 of the vehicle 100 are steered straight while the vehicle 100 is traveling forward. It is contemplated that in one embodiment the user may be instructed to steer the vehicle straight by manually controlling the steering wheel. In an additional embodiment, the vehicle 100 may automatically steer the vehicle 100 straight using the powering steering assist system 115. More specifically, the trailer backup assist system 105 may operate the steered wheels 1302 of the vehicle 100 using the servo steering motor 1300 in conjunction with the steering angle detection apparatus 140.
Once the sensor readings are being received and the vehicle is being steered straight and driving forward, the illustrated embodiment of the hitch angle calibration routine 1308 then proceeds to process an initiating routine 1310 at step 1358. The initiating routine 1310 of the present embodiment may, similar to the initiating routine illustrated in FIG. 32, calculate filtered values for the wheel steer angle rate, the hitch angle rate, and the vehicle speed. Furthermore, these filtered values may be compared against threshold values to ensure the hitch angle calibration routine is preformed when vehicle conditions are acceptable for such calculation. Specifically, the filtered steering angle rate may be less than a maximum allowable steering angle rate, the trailer angle rate may be less than the maximum allowable trailer angle rate, and the filtered vehicle speed may be less than the maximum allowable vehicle speed, such as 10 mph, 15 mph, or other conceivable threshold speed. When these or more or fewer conditions are met, the system may proceed to the following step of the hitch angle calibration routine.
As also illustrated in FIG. 33, at step 1360 the hitch angle calibration routine 1308 determines whether the hitch angle rate and the yaw rate are both substantially zero. Specifically, the determination of reaching a value of substantially zero may be one or a combination of the value being within a close proximity to zero or the value being zero or substantially zero over a predetermined period of time. It is contemplated that the increment of time may be proportional to the filtered vehicle speed, such that increasing speed of the vehicle results in decreasing the increment of time the measured hitch angle .gamma.(m) and the steering angle must be substantially constant to determine the offset .gamma.(o). It is also contemplated that the offset may be determined when the measured hitch angle and the steering angle are substantially constant while the vehicle and the trailer are reversing over a threshold distance, such as a distance is greater than half a circumference of a steered wheel of the vehicle or other conceivable distances. When the system makes a determination that both values are substantially zero, the system, at step 1362 is then able to determine the actual hitch angle .gamma.(a) based upon the vehicle characteristics. In one embodiment, when the above conditions are met the actual hitch angle .gamma.(a) will be zero. However, some vehicle characteristics, such as an offset hitch location, may result in the actual hitch angle .gamma.(a) deviating from zero with these conditions met. At step 1364 the system then determines the offset .gamma.(o) between the actual hitch angle .gamma.(a) and the measured hitch angle .gamma.(m) for purposes of operating the trailer backup assist system 105. Again, at step 704 the trailer backup assist system 105 may notify the driver that the calibration is complete and may store the hitch angle offset value in memory to be associated with the attached trailer 110.
Referring now to FIG. 34, an additional embodiment of the hitch angle calibration routine 1308 is illustrated that may consider the vehicle's direction of movement or potential direction of movement before choosing a method for determining the offset .gamma.(o) of the measured hitch angle .gamma.(m). The vehicle's direction of movement may be based upon the presently engaged gear of the transmission, such as drive or reverse for automatic transmissions. The vehicle's potential direction of movement, however, may be based upon the available space in front of or behind the vehicle and trailer combination. At step 1366, if the vehicle 100 is moving in either the forward or rearward directions, the system may determine if enough available space exists for the vehicle 100 to continue moving in such direction and complete the calibration of the trailer backup assist system 105. If enough available space is not present, the hitch angle calibration routine 1308 of the illustrated embodiment may instruct the driver to move the vehicle 100 in the opposite or an alternative direction, provided enough available space exists in such direction to complete the calibration. Also, if the vehicle 100 is not moving, the system may determine the preferred direction of movement for the vehicle 100 and trailer 110 to move to have enough space for the vehicle 100 to complete the calibration of the trailer backup assist system 105. At step 1368 the system may instruct the driver, such as through the HMI, to drive either forward or in reverse, as determined in the previous step 1366. Based on which direction the vehicle is instructed to move, this embodiment of the hitch angle calibration routine 1308 may employ one of two alternative methods to determine the actual hitch angle .gamma.(a) for completing the calibration. Specifically, if the vehicle 100 is traveling forward, at step 1370, the system then proceeds to ensure that the vehicle is steered straight 1372, while sensing the yaw rate of the vehicle 1374 and sensing the hitch angle rate 1376. The sensed hitch angle .gamma.(m) is used by the system to determine the hitch angle rate at step 1378 and then continue on to step 1380 to determine when the hitch angle rate and the yaw rate of the vehicle are substantially zero, similar to the method previously described with reference to the embodiment disclosed in FIG. 33. When the hitch angle rate and the yaw rate of the vehicle are substantially zero, at step 1380 the hitch angle calibration 1308 routine may determine the actual hitch angle .gamma.(a) to be substantially zero, which may then be used in conjunction with the measured hitch angle .gamma.(m) to determine the offset .gamma.(o) at step 1382.
Alternatively, if the vehicle 100 is reversing or instructed to reverse, at step 1384, once the vehicle 100 is reversing, the system proceeds to sense the steering angle .delta. of the vehicle 100 at step 1386 and sense the hitch angle .gamma.(m) at step 1388 to then determine the hitch angle rate and the steering angle rate at step 1390. At step 1392 the system determines when both the hitch angle rate and the steering angle rate are substantially zero. When both these values are substantially zero, the hitch angle calibration routine 1308 may determine the offset .gamma.(o) of the measured hitch angle .gamma.(m) based upon the length D of the trailer 110, the wheelbase length W of the vehicle 100, and the distance L from the rear axle of the vehicle 100 to the trailer 110, as generally set forth in the embodiment of the hitch angle calibration routine 1308 described with reference to FIGS. 31 and 32. In the embodiment disclosed in FIG. 34, once the hitch angle offset .gamma.(o) is determined at step 1382, the calibration routine commences at step 704 and may notify the driver, such as via the HMI or another similar notification.
Hitch Angle Sensor Assembly
As disclosed herein, it is advantageous to use information that is representative of a hitch angle between a vehicle and a trailer attached to the vehicle, also described herein as the actual hitch angle .gamma.(a) or trailer angle. For instance, the trailer backup assist system 105 and other conceivable vehicle systems may utilize hitch angle information as an input into the system. In accordance with the previous disclosure, the estimated hitch angle .gamma. may be derived from information collected from one or more sensors on the vehicle, one or more sensors on the trailer, a hitch angle detection apparatus 130 on the vehicle 100, a hitch angle detection component 155 on the trailer 110, or other conceivable sensor systems.
Referring now to FIGS. 35-41, one embodiment of a hitch angle sensor assembly 1400 is illustrated for determining a hitch angle .gamma. between a trailer 110 attached to a vehicle 100. The hitch angle sensor assembly 1400 includes a housing 1402 fixed to a hitch ball 15 on the vehicle 100, whereby an element 1404 attached to the trailer 110 rotates relative to the housing 1402 about an axis 1406 defined by the hitch ball 15. The hitch angle sensor assembly 1400 according to another embodiment defines the housing 1402 as a spacer 1408 fixed between a hitch ball 15 and a mounting surface 1410 on the vehicle 100. An element 1404 may be rotatably coupled with the spacer 1408 for rotating about the axis 1406 defined by the hitch ball 15. A connecting member 1412 may secure the element 1404 to the trailer 110 for rotating the element 1404 in conjunction with angular movement of the trailer 110. A proximity sensor 1414 is coupled with the spacer 1408 and senses movement of the element 1404 for determining the hitch angle. It is contemplated that the element 1404 in other embodiments may be alternatively secured to the trailer 110 to rotate the element 1404 relative to the sensor upon angular movement of the trailer 110. These and other embodiments of the hitch angle sensor assembly 1400 are described in more detail below.
As shown in the embodiment illustrated in FIGS. 35-36, the vehicle 100 includes a vehicle hitch connector 1416 that has a hitch ball 15 coupled with a mounting surface 1410 on the vehicle 100, which is generally centered across a width of the vehicle 100 at a rear portion 1426 of the vehicle 100 proximate the bumper beam 1418. The trailer 110, according to the illustrated embodiment, includes a tongue 112, shown as a longitudinally extending bar, with a coupler assembly 114 arranged at a forward end thereof. The coupler assembly 114 attaches to the hitch ball 15 to provide a pivoting connection 117 between the vehicle 100 and the trailer 110. However, it is conceivable that the trailer 110 may include an alternative coupler assembly 114 and the vehicle 100 may include an alternative hitch connector, such as a fifth wheel connection, a European-style hitch ball, or other conceivable configurations to provide a pivoting connection 117 between the vehicle 100 and the trailer 110.
As also shown in FIG. 36, the vehicle 100 includes a receiver 1420 having a longitudinally oriented aperture that engages a hitch mount 1422. As such, the hitch mount 1422 includes an attachment member 1424 having a generally square cross section to engage the aperture of the receiver 1420. A rear portion 1426 of the hitch mount 1422 is integrally coupled with the attachment member 1424 and includes a substantially planar mounting surface 1410 with a generally horizontal orientation. In additional embodiments, the hitch receiver 1420 may be configured with a mounting surface 1410 arranged at a higher or lower elevation, commonly referred to as a hitch drop, that is configured for a specific trailer 110. The mounting surface 1410 of the hitch mount 1422 may also have an alternative shape or curvature from that illustrated. Furthermore, it is contemplated that the mounting surface 1410 may include a lower surface 1428 (FIG. 36A) of the hitch mount 1422, a substantially horizontal location directly on the bumper beam 1418, or other suitable towing locations on the vehicle 100. The hitch ball 15 in the illustrated embodiment is coupled with the mounting surface 1410 of the hitch mount 1422 proximate a rearward end of the hitch mount 1422.
With further reference to the embodiment illustrated in FIG. 36-36A, the connecting member 1412 couples with a bottom surface 1430 of the tongue 112 of the trailer 110 at a distance longitudinally spaced from the hitch ball 15. In the illustrated embodiment, the connecting member 1412 comprises a cord 1432 having end portions 1434 coupled with the element 1404 of the hitch angle sensor on opposing sides of the hitch ball 15. The cord 1432 extends rearward from the end portions 1434 to couple with the trailer 110 at a central portion 1436 of the cord 1432. Specifically, in the illustrated embodiment, the cord 1432 has a loop 1438 formed at the central portion 1436 that substantially encompasses a circumference of a cylindrical magnet 1440 that is configured to magnetically attach to a ferromagnetic portion of the tongue 112 of the trailer 110. The loop 1438 of the cord is secured around the cylindrical magnet 1440 with a cinch 1442 formed between opposing portions of the cord on opposite sides of the cylindrical magnet 1440. The cord 1432 may comprise elastomeric material to allow the cylindrical magnet 1440 to attach to various types of trailers and locations thereon. It is contemplated that the connecting member 1412 may additionally or alternatively include generally inflexible or substantially rigid members that span between the element 1404 of the hitch angle sensor assembly 1400 and the trailer 110.
Referring now to the embodiment illustrated in FIG. 37, the spacer 1408 is shown fixedly coupled between a bottom surface 1444 of the hitch ball 15 and the mounting surface 1410. More specifically, the illustrated embodiment of the hitch ball 15 includes a head portion 1446 having a spherical shape that is connected to a shoulder portion 1448 with a generally disc shape by a neck portion 1450 therebetween. The neck portion 1450 has a substantially cylindrical shape with a central axis 1452 that defines the vertically oriented axis 1406 of the hitch ball 15. As such, the neck portion 1450 is co-axial with the shoulder portion 1448 and the head portion 1446 has a central point substantially in line with the vertical axis 1406. The bottom surface 1444 of the hitch ball 15 is defined by the downward facing surface of the shoulder portion 1448 that is configured to abut the mounting surface 1410 of the hitch mount 1422. In the illustrated embodiment of the hitch angle sensor assembly 1400, the spacer 1408 is fixed between the bottom surface 1444 and the mounting surface 1410, such that the head portion 1446 and the neck portion 1450 of the hitch ball 15 are not interfered with by the hitch angle sensor assembly 1400 during operation of the vehicle 100 and trailer 110.
As illustrated in FIG. 38, the hitch ball 15 is shown having a threaded attachment section 1454 with a cylindrical shape extending downward from the bottom surface 1444 in co-axially alignment with the neck portion 1450 of the hitch ball 15. The diameter of the threaded member is sized to extend through a similarly sized attachment aperture 1456 in the hitch mount 1422, as generally understood in the art. The attachment aperture 1456 in the hitch mount 1422, as illustrated, is substantially cylindrical and vertically oriented to extend between the mounting surface 1410 and the lower surface 1428 of the hitch mount 1422. In the illustrated embodiment, a nut 1458 is provided to threadably engage the threaded member and thereby secure the nut 1458 in abutting contact with the lower surface 1428 of the hitch mount 1422 to provide a compressive force between the bottom surface 1444 of the hitch ball 15 and the mounting surface 1410 for effectuating a secure and generally fixed connection of the spacer 1408 between the hitch ball 15 and the hitch mount 1422.
With further reference to FIG. 38, the spacer 1408 includes a curved channel 1460 about the axis 1406 of the hitch ball 15 in a substantially horizontal plane that is in parallel alignment with the mounting surface 1410. In the illustrated embodiment, the curved channel 1460 is formed around an upper section 1462 of the spacer 1408 to provide a lower section 1464 of the spacer 1408 with sufficient height to accommodate the proximity sensor 1414 coupled therewith. Also, in the illustrated embodiment, a central aperture 1466 is formed vertically through the upper and lower sections for aligning with the attachment aperture 1456 in the hitch mount 1422. A vertical support section 1468 is defined along an internal surface 1470 of the central aperture 1466 between the top surface of the spacer 1408 and a bottom surface of the spacer 1408 to withstand loading and compressive forces between the hitch ball 15 and the mounting surfaces 1410. More specifically, the vertical support section 1468 proximate the upper section 1462 includes a wall thickness and a compressive strength sufficient to withstand the forces between the hitch ball 15 and the mounting surface 1410, and thereby prevent deformation or buckling of the spacer 1408. The spacer 1408 may be made from various materials having the qualities described above, and in one embodiment may be formed from a metal or a metal alloy, and in a more preferred embodiment may be a machined steel.
Still referring to FIG. 38, the element 1404 is slidably coupled with the channel on the upper portion of the spacer 1408 to effectuate the ability of the element 1404 to rotate relative to the spacer 1408 about the axis 1406 defined by the hitch ball 15. In the illustrated embodiment, the element 1404 has a ring shape with eyelets 1472 protruding from opposing lateral sides of the element 1404 for engaging end portions 1434 of the connecting member 1412. The element 1404 may also be formed from various materials; however, the element 1404 is preferably formed from a polymer material, and more preferably molded with a plastic material having a low coefficient of friction to slidably rotate about the curved channel 1460 of the spacer 1408.
As shown in the embodiment illustrated in FIG. 39, the element 1404 has a magnetic portion 1472 that is configured for the proximity sensor 1414 to sense a rotated position of the element 1404, which corresponds to a hitch angle of the trailer 110 relative to the vehicle 100. In the illustrated embodiment, the magnetic portion 1472 includes an arcuate shape with a center point 1474 offset from the axis 1406 of the hitch ball 15, such that the arcuate shape varies in radial distance about the axis 1406. Specifically, the arcuate shape of the magnetic portion 1472 has a spacing from the axis 1406 that steadily increases from one end 1475 of the magnet to the other end 1475. Accordingly, it is contemplated that the arcuate shape of the magnetic portion 1472 in other embodiments may not have a circular shape to define a center point, but may still vary in distance about the vertical axis 1406 to provide feedback to the proximity sensor 1414 indicative of the hitch angle. Further, the magnetic portion 1472, in the illustrated embodiment, comprises a strip magnet 1476 having a first side 1478 directed generally away from the vertical axis 1406 and a second side 1480 directed generally toward the axis 1406, such that the first side 1478 has an opposite polarity from the second side 1480. In one embodiment, the first side 1478 of the strip magnet 1476 has a south pole directed away from the vertical axis 1406 and the second side 1480 has a north pole directed toward the vertical axis 1406. It is contemplated that the polarity may be reversed in alternative embodiments, and additionally conceivable that the strip magnet 1476 may have separate magnets arranged in a Halbach array or other arrangements to provide a magnetic field that varies across the proximity sensor 1414 upon rotation of the element 1404 relative to the spacer 1408.
Accordingly, as further illustrated in the embodiment shown in FIG. 39, the proximity sensor 1414 includes a magnetic field sensor 1482, specifically a linear hall effect sensor, that is arranged in a plane generally parallel to the horizontal plane in which the element 1404 rotates about the spacer 1408. However, it is contemplated that the magnetic field sensor 1482 may be alternatively arranged in a different location or a different orientation relative to the spacer 1408 to provide varied and distinguishable voltage outputs upon rotation of the element 1404 relative to the spacer 1408.
With reference to FIGS. 38-40, the trailer 110 is pivoted away from the substantially in-line position shown in FIG. 39 to a right side orientation shown in FIG. 40 with a first hitch angle 1484 and a left side orientation shown in FIG. 42 with a second hitch angle 1486. As shown in FIG. 41, the connecting member 1412 rotates the element 1404 with the angular change of the trailer 110 relative to the vehicle 100. Upon the rotation to the first hitch angle 1484, the magnetic portion 1472 of the element 1404 moves from intersecting a central location 1488 of the magnetic field sensor 1482 (FIG. 39) to intersecting a forward location 1490 of the magnetic field sensor 1482. The magnetic field sensor 1482 outputs a lower voltage at the forward location 1490 then the central location 1488 such that the difference is measurable and convertible to the first hitch angle 1484 that, in general, accurately correlates with the hitch angle .gamma. between the vehicle 100 and trailer 110.
Additionally, in FIG. 41 upon rotation to the second hitch angle 1486, the magnetic portion 1472 of the element 1404 is rotated, such that the magnetic portion 1472 intersects the proximity sensor 1414 at a rearward location 1492. The linear hall effect sensor, in the illustrated embodiment, is configured to sense the intersecting location of magnetic portion 1472 within the horizontal plane of the hall effect sensor. Accordingly, the linear hall effect sensor outputs a substantially lower voltage in the right side orientation versus the left side orientation, corresponding with a small output valve as shown in FIG. 40 and a greater output valve as shown in FIG. 41, whereby the controller of the hitch angle sensor assembly 1400 is configured to correlate an output value larger than the inline orientation shown in FIG. 39 with a right side orientation of the trailer 110 and an output value less than the inline orientation with a left side orientation of the trailer 110. Accordingly, the magnetic field sensor senses the field strength of the magnet that corresponds with the rotated position of the element 1404 relative to the housing 1402, whereby the rotated position is used to determine the hitch angle .gamma. between the trailer 110 and the vehicle 100. It is also understood that the proximity sensor 1414 in additional embodiments of the hitch angle sensor assembly 1400 may include a potentiometer, a capacitive sensor, an inductive sensor, and other conceivable sensors as generally understood by one having ordinary skill in the art.
Horizontal Camera to Target Distance Calculation
In order to implement some of the features described herein, a user is typically required to set up the trailer backup assist system 105. This can include properly placing a target on a trailer as well as obtaining one or more measurements associated with a particular vehicle-trailer configuration. Two user-obtained measurements can include a horizontal camera to target distance and a target to ground distance. Since the user is typically charged with performing these measurements, there is a possibility for erroneous measurements being reported to the trailer backup assist system 105, thereby potentially diminishing the accuracy of hitch angle detection and/or other actions performed by the trailer backup assist system 105. To lessen the likelihood of a user reporting erroneous measurements during the set up process, a system and method is disclosed herein that at most, requires the user to measure only the target to ground distance, which is supplied to the trailer backup assist system 105 and used to calculate the horizontal camera to target distance. In this manner, the potential for human error is reduced and as an additional benefit, the process of setting up the trailer backup assist system 105 is shortened.
Referring to FIG. 42, the trailer backup assist system 105 is shown including a camera 2000, an input device 2005, and a controller 2010 configured to communicate with the input device 2005 and the camera 2000. According to one embodiment, the camera 2000 can be an existing rearview camera of a vehicle 2015 and is configured to image a target 2020 that is attached to/integral with a surface of a trailer 2025. The input device 2005 can be a human machine interface (e.g., HMI 102) through which a user interacts with the trailer backup assist system 105. Additionally or alternatively, the input device 2005 can include a portable electronic device (e.g., portable device 26 in FIG. 11) configured to wirelessly communicate with the trailer backup assist system 105 such as a smartphone, tablet, and the like. As described previously, the user can interact with the input device 2005 via any conventional means, such as, but not limited to, depressing a button, rotating a knob, flipping a switch, and/or using a finger to perform a touching/tracing action on a display screen.
The controller 2010 can be any controller of an electronic control system that provides for setup functionality of the trailer backup assist system 105. The controller 2010 can include a processor 2030 and/or other analog and/or digital circuitry for processing one or more routines. Additionally, the controller 2010 can include memory 2035 for storing one or more routines. According to one embodiment, the controller 2010 can be configured to receive and process information from the input device 2005 and image data from the camera 2000.
Discussion now turns to a method for calculating a horizontal camera to target distance using the trailer backup system 105. The method will be described below as being implemented by the controller 2010. As such, this method may be a routine executed by any processor (e.g., processor 2030), and thus this method may be embodied in a non-transitory computer readable medium having stored thereon software instructions that, when executed by a processor, cause the processor to carry out its intended functionality.
With reference to FIGS. 43-45, the method will be described in which the controller 2010 calculates a horizontal camera to target distance d.sub.h. To do so, the controller 2010 is supplied with a user-obtained measurement entered through the input device 2005 and can additionally use image data from the camera 2000 and known camera and/or vehicle related parameters that can be stored in memory (e.g., memory 2035) and accessible to the controller 2010. While implementing said method, certain assumptions are made with regard to parameters associated with the vehicle 2015 and trailer 2025. Examples of such assumptions include, but are not limited to, the target 2020 being disposed on the trailer 2025 such that the target 2020 is capable of being detected by the camera 2000, the camera 2000 being located at a position above the target 2020, and the vehicle 2015 and the trailer 2025 being properly aligned with one another.
With respect to the illustrated embodiment, the camera is exemplarily shown coupled to a rear member 2038 (i.e. tailgate) of the vehicle 2015 and the target 2020 is positioned longitudinally across a tongue portion 2040 of the trailer 2025. In the illustrated embodiment, the camera 2000 has a vertical field of view defined by an upper field extent 2045 and a lower field extent 2050 for imaging a rear vehicle area that includes the target 2020. To determine the horizontal camera to target distance d.sub.h using the method described herein, the controller 2010 calculates a first horizontal distance d.sub.1 and a second horizontal distance d.sub.2 that are summed together to yield the horizontal camera to target distance d.sub.h.
The first horizontal distance d.sub.1 corresponds to a horizontal distance from the camera 2000 to an intersection point p.sub.i between the lower field extent of the vertical field of view and a centerline longitudinal axis X of the target 2020, and is expressed by equation 1: d.sub.1=d.sub.v tan .theta.
where,
d.sub.h: horizontal camera to target distance;
d.sub.1: first horizontal distance;
d.sub.2: second horizontal distance;
d.sub.v: vertical camera to target distance;
.theta.: a known angle between a vertical extent Y of the rear member 2038 of the vehicle 2015 and the lower field extent 2050 of the vertical field of view of camera 2000;
t.sub.g: target to ground distance;
r.sub.h: known receiver height;
d.sub.m: draw bar drop measurement;
p.sub.i: intersection point;
p.sub.m: target midpoint.
To calculate the vertical camera to target distance d.sub.v, it is preferable for the user to measure a target to ground distance t.sub.g, which can be supplied to the controller 2010 via the input device 2005. Alternatively, in some cases, the controller 2010 can estimate the target to ground distance t.sub.g within an acceptable tolerance by using a known receiver height r.sub.h for the target to ground distance t.sub.g value in instances where a straight draw bar 2055 is used. In instances where the drawbar 2055 has a drop, the controller 2010 can be supplied with a draw bar drop measurement d.sub.m, which is typically known to the user, and estimates the target to ground distance t.sub.g by subtracting the draw bar drop measurement d.sub.m from the receiver height r.sub.h (see FIG. 46). It should be appreciated that the draw bar drop measurement d.sub.m can be supplied to the controller 2010 in a variety of manners. For example, the draw bar drop measurement d.sub.m can be manually entered via the input device 2005. In instances where a barcode or other machine readable code is provided on the draw bar 2055, it is possible to use the camera 2000 or a portable electronic device equipped with a camera (e.g., a smartphone) to perform optical character recognition (OCR) to identify the particular draw bar model and automatically import the draw bar drop measurement d.sub.m to the trailer backup assist system 105. In any event, once the target to ground distance t.sub.g has been determined, the controller 2010 subtracts the target to ground distance t.sub.g from a known camera to ground distance c.sub.g to calculate the vertical camera to target distance d.sub.v. By virtue of angle .theta. being known, the controller 2010 can now calculate the first horizontal distance d.sub.1 using equation 1.
Once the first horizontal distance d.sub.1 has been calculated, the controller 2010 next calculates the second horizontal distance d.sub.2, which corresponds to a distance from the intersection point p.sub.i to a target midpoint p.sub.m, and is expressed by equation 2: d.sub.2= {square root over (d.sub.a.sup.2+d.sub.b.sup.2-2d.sub.ad.sub.b cos .gamma.)}
where,
d.sub.a: camera to intersection point distance;
d.sub.b: camera to target midpoint distance;
.gamma.: angle between the camera to target midpoint distance d.sub.b and the camera to intersection point distance d.sub.a.
Having previously calculated the vertical camera to target distance d.sub.v and the first horizontal distance d.sub.1, the camera to intersection point distance d.sub.a can be calculated using the Pythagorean Theorem.
Angle .gamma. may be calculated by observing a relationship between the vertical field of view and a corresponding camera image. This relationship is shown by equation 3:
.gamma..delta. ##EQU00010##
where,
.delta.: vertical field of view angle;
p.sub.c: pixel count taken from the lower field extent to the target midpoint p.sub.m with respect to camera image 2060, as shown in FIG. 47;
v.sub.r: vertical resolution of the camera image 2060.
Pixel count p.sub.c can be determined using any suitable image recognition method and naturally varies based on the positioning of the target 2020. The vertical field of view angle .delta. and the vertical resolution v.sub.r are each typically known from the camera 2000 specification and the corresponding values can be stored to memory (e.g., memory 2035) and supplied to the controller 2010 in any suitable manner. Once the controller 2010 receives the pixel count p.sub.c, vertical field of view angle .delta., and vertical resolution v.sub.r, equation 3 can be solved to calculate angle .gamma..
Camera to target midpoint distance d.sub.b can be calculated using equation 4:
.varies. ##EQU00011##
where,
d.sub.v: vertical camera to target distance;
.alpha.: angle between the camera to target midpoint distance d.sub.b and the centerline longitudinal axis X of the target.
By recognizing that the vertical camera to target distance d.sub.v is perpendicular with the centerline longitudinal axis X, angle .alpha. can be calculated by subtracting 90 degrees, angle .delta., and angle .gamma. from 180 degrees. Having done this, the camera to target midpoint distance d.sub.b can be calculated using equation 4, which allows for the second horizontal distance d.sub.2 to be calculated using equation 2. Finally, the horizontal camera to target distance d.sub.h can be calculated by summing together the first horizontal distance d.sub.1 and the second horizontal distance d.sub.2.
Display System Utilizing Vehicle and Trailer Dynamics
Backing and maneuvering a trailer in tight locations can be a difficult task due to challenges in vision and path prediction. Challenges may vary based on vehicle dimensions, trailer dimensions, and environmental conditions. With large trailers, a field of view behind the trailer may be completely occluded. With smaller trailers, small changes in steering can cause a heading angle of the trailer to inflect very quickly. In other situations, maintaining a tight vehicle path corridor while minimizing a front axle lateral offset from steering can be a significant challenge as well. The following display systems and methods provide various novel implementations to improve visibility and allow operators to safely and easily view the environment surrounding a vehicle and trailer.
Referring to FIG. 48, a schematic diagram illustrating the vehicle 100 coupled to a trailer 2352 is shown in accordance with the disclosure. The vehicle 100 and the trailer have a plurality of imaging devices C1-C5. Each of the imaging devices has a field of view focusing on an environment 2354 surrounding the vehicle 100 and the trailer 2352. In the various implementations discussed herein, the imaging devices C1-C5 may be implemented to provide views of the environment 2354 surrounding the vehicle 100 and the trailer 2352 that may be displayed on a display screen 2355 or any form of display device visible to an operator of the vehicle 100. The imaging devices C1-C5 may also be configured to provide views of a trailer hitch and a relationship between the vehicle 100 and the trailer 2352 relative to a hitch angle .gamma..
The imaging devices C1-C5 may be arranged in various locations such that each field of view of the imaging devices C1-C5 is configured to capture a significantly different portion of the surrounding environment 2354. Each of the imaging devices C1-C5 may comprise any form of device configured to capture image data, for example Charge Coupled Device (CCD) and Complementary Metal Oxide Semiconductor (CMOS) image sensors. Though five imaging devices are discussed in reference to the present implementation, the number of imaging devices may vary based on the particular operating specifications of the particular imaging devices implemented and the proportions and/or exterior profiles of a particular vehicle and trailer. For example, large vehicle and trailer combinations may require additional imaging devices to capture image data corresponding to a larger surrounding environment. The imaging devices may also vary in viewing angle and range of a field of view corresponding to a particular vehicle and trailer combination.
The imaging devices C1, C3, C4, and C5 are disposed on the vehicle 100 and oriented such that the each field of view of the imaging devices is directed toward a substantially different region of the environment 2354. A first imaging device C1 is disposed centrally on a rear facing portion 2356 of the vehicle 100 proximate a tailgate 2358 or similar area of the vehicle 100. In some embodiments, the imaging device C1 may be disposed proximate a rear-bumper 2362. In addition to the first imaging device C1, or alternatively, an imaging device C1' may be disposed centrally on a rear facing portion 2356 of the vehicle 100 proximate a roof portion 2360.
A third imaging device C3 is disposed centrally on a front facing portion 2364 of the vehicle 100 proximate a front grill portion 2365. In addition to the third imaging device C3, or alternatively, an imaging device C3' may be disposed centrally on the front facing portion of the vehicle 100 proximate the roof portion 2360. Imaging devices C1 (and/or C1') and C3 (and/or C3') are oriented such that a first field of view of the first imaging device C1 and a third field of view of the third imaging device C3 are configured to view substantially all of the environment 2354 in the aft and fore directions relative to the vehicle 100. Though particular locations are discussed in reference the imaging devices C1-C5, each of the imaging devices C1-C5 may be located in various locations, on or within the vehicle 100, to capture image data corresponding to the fields of view discussed herein.
The imaging devices C4 and C5 are disposed on a passenger's side 2366 and a driver's side 2368 of the vehicle 100 respectively and are configured to capture image data corresponding to the environment 2354 to the sides of the vehicle 100. In some implementations, a fourth imaging device C4 is disposed proximate a passenger's side mirror 2370 and a fifth imaging device C5 is disposed proximate a driver's side mirror 2372. The imaging devices C4 and C5, in combination with imaging devices C1 and C3, are configured to capture image data corresponding to approximately the entire environment 2354 surrounding the vehicle 100. However, when the vehicle is towing the trailer 2352, a large portion of a rearward facing field of view from the vehicle 100 may be occluded by the trailer 2352.
A second imaging device C2 may be configured to operate in combination with the imaging devices C1 and C3-C5 to provide a combined field of view of the environment 2354 surrounding the vehicle 100 and the trailer 2352. The second imaging device C2 may be disposed on a rear portion 2374 of the trailer 2352. The second imaging device C2 may be located centrally in an upper portion 2376 of the rear portion 2374 of the trailer 2352 and have a rearward facing field of view relative to the trailer 2352. The location of the second imaging device C2 may vary substantially for various trailer types having different proportions and geometries. In various implementations, the imaging device C2 may have a substantially rearward facing field of view configured to capture image data corresponding to the environment 2354 that may be occluded from the imaging devices C1 and C3-C5 by the trailer 2352.
Referring now to FIG. 49, a top plan view of the vehicle 100 connected to the trailer 2352 is shown demonstrating a plurality of fields of view of the imaging device C1-C5. In the illustrated embodiment, the first imaging device C1 is shown having the first field of view 2392. The second imaging device C2 is shown having the second field of view 2394, and the third imaging device C3 is shown having a third field of view 2396. In this implementation, each of the fields of view 2392-2396 of the imaging devices C1-C3 comprises a horizontal viewing angle of approximately 170 degrees or greater. Each of the imaging devices C1-C3 is configured to capture image data corresponding to the fore and aft directions relative to the vehicle 100 and the trailer 2352.
The imaging devices C4, C5 are configured to capture image data corresponding to the operating area to each side of the vehicle 100 and the trailer 2352. The fourth imaging device C4 is shown having a fourth field of view 2398 and the fifth imaging device C5 is shown having a fifth field of view 2400. Each of the fourth field of view 2398 and the fifth field of view 2400 may also comprise a horizontal viewing angles of approximately 170 degrees or greater. The fourth field of view 2398 and the fifth field of view 2400 may form overlapping portions 2402 with the first field of view 2392 and the third field of view 2396. Though not shown, each of the first, fourth, and fifth fields of view 2392, 2398, 2400 may further form overlapping portions with the second field of view 2394. The overlapping portions may be combined in some implementations to form an expanded view or an aerial view of the vehicle 100 and the trailer 2352. The imaging devices C1-C5 are configured to capture image data corresponding to objects and terrain in the operating area of the vehicle 100 and the trailer 2352.
In the various implementations discussed herein, each of the fields of view 2392-2400 may be combined in any combination to form various expanded fields of view and corresponding viewing angles based on operating states and relative orientations of the vehicle 100 and the trailer 2352. The operating states and relative orientations of the vehicle 100 and the trailer 2352 may be determined from a velocity V of the vehicle 100, the wheel steer angle .delta. of the vehicle 100, and the hitch angle .gamma. between the vehicle 100 and the trailer 2352. In some implementations, the fields of view 2392-2400 may also be combined to form a composite aerial view or bird's eye view of the vehicle 100 and the trailer 2352. Information related to the operating state and orientation of the vehicle 100 relative to the trailer 2352 may also be utilized to generate a simulated aerial view of the vehicle 100 and the trailer 2352 demonstrating the hitch angle .gamma. about a hitch point 2404.
The various views of the vehicle 100 and the trailer 2352, as discussed herein, may be generated and displayed by an imaging controller on the screen 2355 such that an operator of the vehicle may view the information corresponding to the vehicle 100, the trailer 2352, and the operating environment 2354. The screen 2355 may be implemented in the vehicle as a center stack monitor, rear view display mirror, gauge cluster monitor, a heads-up display or any other device configured to present the image data processed from the imaging devices C1-C5. The image data from the imaging devices C1-C5 may be raw image data, lens corrected camera image data, composite image data or any other form of image data captured by the imaging devices C1-C5 or any form of imaging device.
Referring now to FIG. 50, a block diagram of the imaging controller 2410 is shown. The imaging controller 2410 may be combined or in communication with the trailer backup assist control module 120 as discussed herein. The image data from the imaging devices C1-C5 may be received and processed by the imaging controller 2410 to generate image data for display on the screen 2355. The imaging controller 2410 may further be operable to receive selections from a vehicle operator of the vehicle 100 via a human machine interface (HMI) 2412 comprising a plurality of user inputs 2414. The HMI 2412 may be implemented in the vehicle 100 similar to the HMI 102. The plurality of user inputs 2414 may provide options to the operator of the vehicle 100 to select a view corresponding to one of the imaging devices C1-C5 or an imaging mode (e.g. manual, automatic, aerial, etc.).
The imaging controller 2410 may also be in communication with a plurality of data collection devices and/or modules configured to receive information corresponding to the velocity V of the vehicle 100, the wheel steer angle .delta. of the vehicle 100, and the hitch angle .gamma. between the vehicle 100 and the trailer 2352. A velocity and direction input 2416 may be configured to receive the velocity V and directional information of the vehicle 100 from an engine control module. A steering angle data input 2418 may be configured to receive the wheel steer angle .delta. of the vehicle 100 from the power steering assist control module 135. A hitch angle data input 2420 may be configured to receive the hitch angle .gamma. from the hitch angle detection apparatus 130. Though the data inputs are described as being received from specific hardware devices (e.g. the power steering assist module 135), the data inputs may be received from any devices implemented by the trailer backup assist control module 120 to monitor the kinematic properties of the vehicle 100 and the trailer 2352. Each of the data inputs may be sampled by the imaging controller 2410. For example, each of the data inputs may be sampled multiple times per second to update values of V, .delta., and .gamma..
The imaging controller 2410 may further be in communication with a GPS data module 2422 and a compass/heading module 2424. The GPS data module 2422 may be operable to determine a global position of the vehicle 100 and communicate the position to the imaging controller 2410. The compass/heading module 2424 may be operable to determine the heading direction of the vehicle 100 relative to a geographic compass direction and communicate the heading direction to the imaging controller 2410. When combined, the global positioning data from the GPS data module 2422 and the heading data of the vehicle 100 from the compass/heading module 2424 may be utilized by the imaging controller 2410 to determine the position and heading of the vehicle 100.
In some implementations, the position and heading of the vehicle 100 may further be utilized by the imaging controller 2410 to request and supplement the image data from the imaging devices C1-C5 with satellite image data, feature data, topographic data, landmark data, and any other data corresponding to the environment 2354 for the determined position and heading of the vehicle 100. The imaging controller 2410 may be in communication with a communication circuitry 2426 operable to wirelessly transmit and receive data. The communication circuitry 2426 may comprise a radio frequency transmitter and receiver for transmitting and receiving signals. The radio frequency transmitter and receiver may be configured to transmit and receive data corresponding to various communication protocols.
The communication circuitry 2426 may be configured to operate in a mobile communications system and may be used to send and receive data and/or audiovisual content. Receiver types for interaction with the communication circuitry 2426 may include GSM, CDMA, WCDMA, GPRS, MBMS, WiFi, WiMax, DVB-H, ISDB-T, etc., as well as additional communication protocols that may be developed at a later time. Wireless communication of the communication circuitry 2426 may follow analog or digital protocol. For digital protocol, the communication circuitry 2426 may also be operable to utilize a frequency hopping algorithm to improve interference robustness of the wireless communications described herein.
The imaging controller 2410 may comprise a memory 2428, and a plurality of modules, circuits, and/or processors configured to process image data received from the imaging devices C1-C5. The plurality of modules may further be utilized to combine the image data received from the imaging devices C1-C5 with satellite image and/or feature data and rendered graphics to form various composite views of the environment 2354 surrounding the vehicle 100 and the trailer 2352. The plurality of modules may include a distortion correction module 2430, a view conversion module 2432, an image trimming/scaling module 2434, an image reference identification module 2436, and an image compositor 2438.
To generate a composite view combining image data corresponding to two or more of the imaging devices C1-C5, the imaging controller 2410 may receive image data from the imaging devices C1-C5 and correct any distortion in the image data with the distortion correction module 2430. Distortion in the image data may be the result of lens distortion, viewpoint correction, or any other form of distortion common to imaging devices. The view conversion module 2432 may then convert a viewpoint of the image data. A viewpoint correction may correspond to altering the orientation of a perspective of the image data corresponding to a field of view of an imaging device. For example, the image data may be adjusted from a side view to an aerial view. The image data from each of the 2 or more imaging devices may then be trimmed and scaled by the image trimming/scaling module 2434 and combined in the image compositor 2438. The composite image data output by the compositor 2438 may form an expanded field of view, an aerial view, or any combination of the image data received from the imaging devices C1-C5.
In some implementations, the relative location of the image data received from the 2 or more imaging devices may further be aligned by the image reference identification module 2436. The image reference identification module 2436 may be operable to detect and identify objects in the image data received from each of the imaging devices and utilize the objects in different fields of view to align and accurately combine the image data. The image compositor 2438 may further be operable to identify occluded and/or missing image data and request satellite image data or other feature data via the communication circuitry 2426 to further supplement and enhance the composite image data. The resulting enhanced composite image data may then be output to the screen 2355 for display to the operator of the vehicle 100.
Referring to FIG. 51, a top plan view of the vehicle 100 connected to the trailer 2352 is shown demonstrating the plurality of fields of view 2392-2400 of the imaging device C1-C5. The plurality of fields of view 2392-2400 are shown trimmed to form a continuous field of view 2442 surrounding the vehicle 100 and the trailer 2352. The imaging controller 2410 is operable to combine the image data corresponding to each of the fields of view 2392-2400 from the plurality of imaging devices C1-C5 to generate the composite image data corresponding to the environment 2354 surrounding the vehicle 100 and the trailer 2352.
The composite image data may be processed by the imaging controller 2410 by trimming and scaling image data as described herein. For example, the overlapping portions 2402 of the fourth field of view 2398, the fifth field of view 2400, and a third field of view 2396 may be manipulated by the imaging controller 2410 to form continuous composite image data utilized to generate the continuous filed of 2442. The composite image data may also be utilized by the imaging controller 2410 to generate any combination of the fields of view 2392-2400 corresponding to 2 or more fields of view. The composite image data may be utilized by the imaging controller 2410 to generate an aerial view of the vehicle 100 and the trailer for display on the screen 2355.
Referring now to FIG. 52, an aerial view 2450 of the vehicle 100 and the trailer 2352 displayed on the HMI 2412 is shown. A vehicle model 2452 of the vehicle 100 and a trailer model 2454 of the trailer 2352 may be incorporated in the aerial view 2450 by the imaging controller 2410 as sample image data and/or rendered graphics. The sample image data may include stock images of the vehicle 100 and a library of trailer images that may be incorporated in the aerial view 2450 to demonstrate the proportions and position of the vehicle 100 relative to the trailer 2352. In some implementations, the imaging controller 2410 may request the dimensions of the trailer 2352 from the vehicle operator via the HMI 2412. The imaging controller may also be operable to estimate the dimensions of the trailer based on known relationships of the positions of each of the imaging devices C1-C5. For example, the imaging controller may be operable to detect the trailer 2352 in the image data with the image reference identification module 2436. Based on the known relationships of the positions of the imaging devices C1-C5 and the corresponding fields of view 2392-2400, the imaging controller 2410 may be operable to determine the proportions, approximate dimensions, and shape of the trailer 2352 to generate the trailer model 2454.
The imaging controller 2410 may further utilize the hitch angle .gamma. to process and compare image data of the trailer 2352 in different positions relative to the vehicle 100 to gain additional image data to determine the proportions, approximate dimensions, and shape of the trailer 2352. The hitch angle .gamma. may further be utilized by the controller to display the trailer model 2454 relative to the vehicle model 2452 on the screen 2355 at the corresponding hitch angle .gamma.. By demonstrating vehicle model 2452 and the trailer model 2454, the imaging controller 2410 may provide useful reference information to the operator of the vehicle 100. In some implementations, a graphic outline simulating the trailer 2352 may also be included in the image data displayed on the screen 2355 for a reference to the operator of the vehicle 100 to demonstrate the position of the trailer 2352 relative to the vehicle 100 and the surroundings of an operating environment model 2456.
Based on the determined proportions, approximate dimensions, and shape of the trailer 2352, the imaging controller 2410 may automatically select a trailer graphic or a stock image of a trailer model 2454 from the library of trailer images or graphics via the memory 2428 and/or the communication circuitry 2426. For example, based on the proportions, approximate dimensions, and shape of the trailer 2352, the imaging controller may send information to a remote server via the communication circuitry 2426 to request an overhead view of a trailer having similar proportions and dimensions to the trailer 2352. The simulated models of the trailer 2352 (e.g. trailer model 2454) may provide for a dimensionally accurate visual reference on the screen 2355 to aid the operator of the vehicle 100 during operation.
A plurality of environmental features 2458 may also be displayed on the screen by the imaging controller 2410. The environmental features 2458 may be incorporated in the image data displayed on the screen 2355 to demonstrate a relative location of the environmental features 2458 relative to the vehicle model 2452 and the trailer model 2454. The locations of the environmental features 2458 may be extrapolated from the composite image data captured by the imaging devices C1-C5 by the image reference identification module 2436 of the imaging controller 2410. Each of the environmental features 2458 may be identified based on one or more feature identification algorithms configured to identify various natural and man-made features that may obstruct the path of the vehicle 100 and the trailer 2352. By incorporating the environmental features 2458 in the aerial view 2450, the imaging controller 2410 may provide valuable information to aid an operator of the vehicle 100.
The environmental features 2458 as discussed herein may include any features relevant to operating the vehicle 100. For example, the environmental features 2458 may include lane lines or markers, curbs, buildings, lamp posts, mailboxes, retaining walls, docks, ramps, roads, telephone poles, and any semi-permanent features that may be catalogued in a feature registry or documented from satellite image data. The environmental features 2458 may also include natural features including slopes, rocks, trees, bushes, hedges and any other features that may obstruct a path of the vehicle 100 and the trailer 2352. Though particular environmental features are discussed in reference to the environmental features 2458, any variety of features that may be relevant to the operation of the vehicle 100 may similarly be displayed by the imaging controller 2410 to aid an operator of the vehicle 100.
The environmental features 2458 may be identified and incorporated in the aerial view 2450 based on satellite image data, feature data, topographic data, landmark data, and any other data corresponding to the position and heading of the vehicle 100. Based on the position and heading of the vehicle 100, the environmental features 2458 may be added to the composite image data and located on the screen 2355 relative to the vehicle model 2452 and the trailer model 2454 by utilizing global positions of each of the environmental features. The location of the environmental features 2458 may be determined by the imaging controller 2410 from the GPS data module 2422 and the compass/heading module 2424. In some embodiments, the environmental features 2458 may be accessed by imaging controller 2410 via the communication circuitry 2426 to update and accurately place the environmental features 2458 relative to the vehicle model 2452 and the trailer model 2454. By enhancing the aerial view 2450 with satellite image data, feature data, etc., the imaging controller 2410 may provide additional information that may be used in addition to the information identified from the imaging devices C1-C5. In some implementations, feature data and satellite image data may further be utilized by the imaging controller 2410 to provide information corresponding to a region that may be occluded from the fields of view 2392-2400 of the imaging devices C1-C5.
The screen 2355 of the HMI 2412 may be configured as a touchscreen 2460. The touchscreen 2460 may be of any type suited to a particular application and may be of a resistive type, capacitive type, surface acoustic wave type, infrared or optical type. The plurality of user inputs 2414 may be implemented as soft keys 2462 on the touchscreen 2460. The soft keys 2462 may provide options for the operator of the vehicle 100 to alter a view displayed by the imaging controller 2410 on the touchscreen 2460. The soft keys 2462 may allow the operator of the vehicle 100 to view the environment 2354 and select a view corresponding to each of the imaging devices C1-C5, a combination of the imaging devices C1-C5, or the composite aerial view 2450. The soft keys 2462 may further provide an option for a manual mode to manually control the view displayed on the screen 2355 or an automatic mode to automatically control the view displayed on the screen 2355 based on the wheel steer angle .delta. and the hitch angle .gamma..
Referring now to FIG. 53, a top plan view of the vehicle 100 connected to the trailer 2352 is shown demonstrating an occluded portion 2470 of the fields of view 2392-2400. In some orientations, the vehicle 100 may be oriented relative to the trailer 2352 such that the occluded portion 2470 is not visible in the plurality of fields of view 2392-2400. The occluded portion 2470 may result from a vehicle centerline 2472 and a trailer centerline 2474 being offset angularly at a hitch angle .gamma. greater than 0 degrees. In some implementations, the hitch angle .gamma. may correspond to an occluded angle 2476.
In order to improve the coverage of the plurality of fields of view 2392-2400, satellite image data and environmental features 2458 may be added to the composite image data captured by the imaging devices C1-C5. The location of the environmental features 2458 relative to the occluded portion 2470 may be determined by the imaging controller 2410 from the GPS data module 2422 and the compass/heading module 2424 relative to the fields of view 2392 adjusted by the hitch angle .delta.. In some embodiments, the satellite image data and environmental features may be accessed by imaging controller 2410 via the communication circuitry 2426 to update and accurately place the environmental features 2458 relative to the vehicle 100 and the trailer 2352. By enhancing the coverage of the fields of view 2392-2400 with satellite image data, feature data, etc., the imaging controller 2410 may provide additional information that otherwise may not be visible in an aerial view due to the occluded portion 2470.
Referring now to FIG. 54, an aerial view 2490 of the vehicle 100 and the trailer 2352 displayed on the HMI device 2412 is shown. Similar to the aerial view 2450 discussed in reference to FIG. 52, the vehicle model 2452, trailer model 2454, environmental features 2458, and soft keys 2462 are displayed on the screen 2355. In some implementations, the hitch angle .gamma. received by the imaging controller 2410 is utilized to adjust the orientation of the trailer model 2454 to accurately represent the relationship between the vehicle 100 and the trailer 2352. The relationship between the vehicle model 2452 and the trailer model 2454 is further supplemented with the environmental features 2458 displayed by the imaging controller 2410 on the screen 2355. The locations of the environmental features 2458 may be determined from the image data corresponding to the fields of view 2392-2400 by the image reference identification module 2436 and from the feature data and/or satellite image information accessed by the communication circuitry 2426 or accessed from the memory 2428.
The imaging controller 2410 may further be operable to add rendered graphics 2492 that may demonstrate distances between the environmental features 2458 relative to the vehicle model 2452 and the trailer model 2454. The distances demonstrated in the rendered graphics 2492 on the screen 2355 by the imaging controller 2410 may be determined based on the dimensions and proportions of the vehicle 100 and the trailer 2352 relative to the locations of the environmental features 2458. The distances may be calculated based on the image data gathered from the fields of view 2392-2400 and the feature data and/or satellite image data as discussed herein. The rendered graphics 2492 may serve to aid the operator of the vehicle in safely navigating the trailer 2352. Though the distances of the rendered graphics 2492 corresponding to the environmental features 2458 may not account for transient objects or instantaneous changes in the environment 2354, the information may still be invaluable to an operator of the vehicle 100 based on a visual inspection or assistance from a spotter when operating the vehicle 100.
The occluded portion 2470 is shown as a composite image on the screen 2355 by the imaging controller 2410. The feature data and/or satellite image data is utilized by the image compositor 2438 of the imaging controller 2410 to incorporate the environmental features 2458 that may otherwise be hidden from the fields of view 2392-2400. An additional occluded portion 2494 is occluded from the fields of view 2392-2400 by an obstruction 2496 in the environment. The imaging controller 2410 is further operable to identify the additional occluded portion 2494 and incorporate the feature data and/or satellite image data in the aerial view 2490 to supplement and simulate the environment hidden by the additional occluded portion 2494. By supplementing the image data from the imaging devices C1-C5, the imaging controller 2410 may display information on the screen 2355 that may otherwise be hidden from the fields of view 2392-2400. The systems and methods described herein may provide beneficial information that may assist the operator of the vehicle 100 when navigating through complex environments with a high level of accuracy.
Referring now to FIG. 55, an expanded view 2510 comprising a combination of the second field of view 2394 and the fourth field of view 2398 is shown. As discussed herein, the imaging controller 2410 is operable to display a combination of at least 2 fields of view that may correspond to 2 or more imaging devices having adjacent fields of view. For example, the imaging controller 2410 may be operable to combine the second field of view 2394 with the adjacent fourth field of view 2398 to generate the expanded view 2510 based on composite image data from the second imaging device C2 and the fourth imaging device C4. The imaging controller 2410 may be operable to combine any number of fields of view that may be oriented to capture image data of adjacent portions the environment 2354 surrounding the vehicle 100 and the trailer 2352.
As discussed in reference to FIGS. 52 and 54, the soft keys 2462 may be utilized by the operator of the vehicle 100 to select any combination of the imaging devices C1-C5. In the manual mode, each of the imaging devices C1-C5 may be displayed on the screen 2355 such that the operator of the vehicle 100 may select each of the imaging devices individually or in combination for display on the screen 2355. Based on the relative orientations of the selected imaging devices and corresponding fields of view, the imaging controller 2410 may generate an expanded view corresponding to the composite image data from the selected fields of view. If one or more of the selected views is not adjacent to the remaining selected fields of view, the controller may display only the fields of view that correspond to adjacent portions of the environment 2354, and in some implementations, may display each field of view on a section of the display in a split screen configuration.
In an automatic mode 2512, as shown in FIG. 55, the wheel steer angle .delta. and the hitch angle .gamma. may be utilized by the imaging controller 2410 to selectively output image data corresponding to at least one field of view of the imaging devices C1-C5. In some implementations, the imaging controller 2410 may also output image data corresponding to the expanded view 2510 based on the operating direction (e.g. forward, reverse) and velocity V of the vehicle, as well as the wheel steer angle .delta., and the hitch angle .gamma.. The imaging controller 2410 may utilize the velocity and direction input 2416, the steering angle data input 2418, and hitch angle data input 2420 to determine the operating state of the vehicle 100 and the trailer 2352. The operating state and relative orientation of the vehicle 100 and the trailer 2352 may then be used to determine the most relevant image data captured by the imaging devices C1-C5 to output and display on the screen 2355. In this way, the imaging controller 2410 may adjust the image displayed on the screen 2355 corresponding to a variety of scenarios.
In one scenario, if the vehicle 100 is traveling in reverse in approximately a straight line (e.g. hitch angle .gamma.<5 deg.), the image data captured by the second imaging device C2 may be displayed on the screen 2355. Also, if the vehicle 100 is traveling in reverse approximately in a straight line, image data corresponding to the first imaging device C1 and the second imaging device C2 may be displayed intermittently or in a split screen configuration on the display 2355. In another scenario, if the vehicle 100 is traveling in reverse and the hitch angle .delta. is biased toward the fourth field of view 2398 (e.g. hitch angle 2 deg.<.gamma.<90 deg.), the image data captured by the second and fourth imaging devices C2, C4 may be displayed on the screen 2355. Also, if the vehicle 100 is traveling in reverse and the hitch angle .delta. is biased toward the fifth field of view 2400 (e.g. hitch angle 2 deg.<.gamma.<90 deg.), the image data captured by the second and fifth imaging devices C2, C5 may be displayed on the screen 2355.
In each of the implementations described herein, including the various scenarios of the vehicle 100, the trailer 2352 and the corresponding hitch angle .gamma., the image data captured by each of the imaging devices C1-C5 is selectively displayed by the imaging controller 2410 and may form an expanded view incorporating image data from each of the selected imaging devices. In some implementations, as the hitch angle .gamma. increases the extents of the horizontal viewing angle corresponding to the selected imaging devices may correspondingly expand to display the relevant information corresponding to the environment 2354. Increasing the extents of the horizontal viewing angle of the selected imaging devices in response to changes in the hitch angle .gamma. may provide for the most relevant information corresponding to a sweeping path of the trailer 2352 to be displayed on the screen 2355. For example, as the hitch angle .delta. increases the horizontal field of view of the selected imaging devices may expand in the expanded view displayed on the screen 2355 to provide the most relevant information to the operator of the vehicle 100.
In yet another scenario, if the vehicle 100 is traveling in the reverse direction and the hitch angle .gamma. is biased toward the fourth field of view 2398, image data captured by the second and third imaging devices C2, C3 may be displayed on the screen 2355. Also, if the vehicle 100 is traveling in the reverse direction and the hitch angle .gamma. is biased toward the fifth field of view 2400, image data captured by the second and third imaging devices C2, C3 may be displayed on the screen 2355. If the vehicle 100 is traveling forward and the hitch angle is biased toward the fourth field of view 2398, image data corresponding to the first imaging device C1, and the second and third imaging devices C2, C3 (or the second and fourth imaging devices C2, C4) may be displayed intermittently or in a split screen configuration on the display or screen 2355. If the vehicle 100 is traveling forward and the hitch angle is biased toward the fifth field of view 2400, image data corresponding to the first imaging device C1, and the second and third imaging devices C2, C3 (or the second and fifth imaging devices C2, C5) may be displayed intermittently or in a split screen configuration on the screen 2355.
In yet another scenario, if the vehicle 100 is traveling in the reverse direction, and the hitch angle .gamma. is extremely biased (.gamma.>70 deg.) toward the fourth field of view 2398, image data captured by the third and fourth imaging devices C3, C4 may be displayed on the screen 2355. If the vehicle 100 is traveling in the reverse direction, and the hitch angle .gamma. is extremely biased (.gamma.>70 deg.) toward the fifth field of view 2400, image data captured by the third and fifth imaging devices C3, C5 may be displayed on the screen 2355. Further, in conditions where the imaging controller 2410 identifies that the hitch angle .gamma. is extremely biased, a warning graphic and/or an alarm may be displayed on the screen 2355 and output through at least one speaker in a passenger compartment of the vehicle 100.
Still referring to FIG. 55, in the automatic mode 2512 the imaging controller 2410 may generate and display a preview window 2514 of the vehicle model 2452 and the trailer model 2454. The preview window may demonstrate the relative orientation of the vehicle 100 and the trailer 2352 by orienting the vehicle model 2452 and the trailer model 2454 based on the hitch angle .gamma.. The preview window 2514 may further include a shaded portion 2560 identifying an approximate field of view or composite field of view selected by the imaging controller 2410 based on the direction of the vehicle motion, the wheel steer angle .delta., and the hitch angle .gamma. as discussed herein. The field of view demonstrated corresponds to the expanded field of view 2510. As shown in FIG. 55, the image data displayed on the screen 2355 corresponds to the environment 2354 behind the trailer 2352 as captured by the second imaging device C2 and the fourth imaging device C4 to form the expanded field of view 2510.
The image data displayed on the screen 2355 includes a plurality of environmental features 2518. A projected trajectory 2520 and an adjustment vector 2522 corresponding to the heading of the trailer 2352 based on the present course of the vehicle 100 are also displayed on the screen 2355. The projected trajectory 2520 is determined based on the direction of motion of the vehicle 100, the wheel steer angle .delta., and the hitch angle .gamma.. For example, the projected trajectory 2520 may demonstrate an expected future position of the trailer 2352 if the vehicle 100 continues at its present course according to the wheel steer angle .delta., and the hitch angle .gamma.. The projected trajectory 2520 may be generated by the imaging controller 2410 based on the dimensions of the trailer and the trailer length D as a simulated graphic overlaid on the image data displayed on the screen 2355.
The adjustment vector 2522 may serve as a preview to the operator of the vehicle 100 to determine an alternate future position of the trailer 2352 and/or as a visual feedback that may change in direction based on a change in the wheel steer angle .delta.. For example, if the operator of the vehicle 100 is unsure of a direction to adjust the wheel steer angle .delta., the operator may stop the vehicle 100 and adjust the rotation of a steering wheel to change the wheel steer angle .delta.. In response to the adjustment of the rotation of the steering wheel, the imaging controller 2410 may alter the adjustment vector 2522 to correspond to an alternate heading direction of the trailer 2352. Once the vehicle 100 begins moving again in reverse, the projected trajectory 2520 may then be adjusted based on the change in the wheel steer angle .delta. as demonstrated by the adjustment vector 2522. The projected trajectory 2520 and the adjustment vector 2522 may serve to further assist the operator of the vehicle 100 to intuitively in accurately control the motion of the trailer in a variety of situations.
The systems and methods described herein may provide for improved methods of supplying the operator of the vehicle 100 with relevant information that may improve the safety and accuracy of operating the vehicle 100 when towing a trailer. In combination with the systems and methods described in this disclosure, the plurality of imaging devices C1-C5 may be utilized to provide various trailer backup assist functions. Though a specific vehicle and trailer were discussed in detail and illustrated in reference to the imaging controller 2410 and the combined imaging system including the plurality of imaging devices C1-C5, the systems and methods described herein may be utilized with any vehicle and trailer combination in accordance with the disclosure.
It is to be understood that variations and modifications can be made on the aforementioned structure without departing from the concepts of the present invention, and further it is to be understood that such concepts are intended to be covered by the following claims unless these claims by their language expressly state otherwise.
* * * * *
References
-
landrover.com/us/en/lr/all-new-range-rover/explore
-
reviews.cnet.com/8301-13746_7-10385619-48.html
-
iphonehacks.com
-
worldcarfans.com
-
palowireless.com/infotooth/tutorial/sdp.asp
-
zoomsafer.com/products/mobilesafer
-
turnoffthecellphone.com/faq.html
-
-
media.ford.com
-
wabco-auto.com
-
grandideastudio.com/portfolio/rfid-read-write-module
-
ASAshop.org
-
back-upbuddy.comwebsiteprint
-
dart-mouth.com/engineering-development.html
D00000
D00001
D00002
D00003
D00004
D00005
D00006
D00007
D00008
D00009
D00010
D00011
D00012

D00013
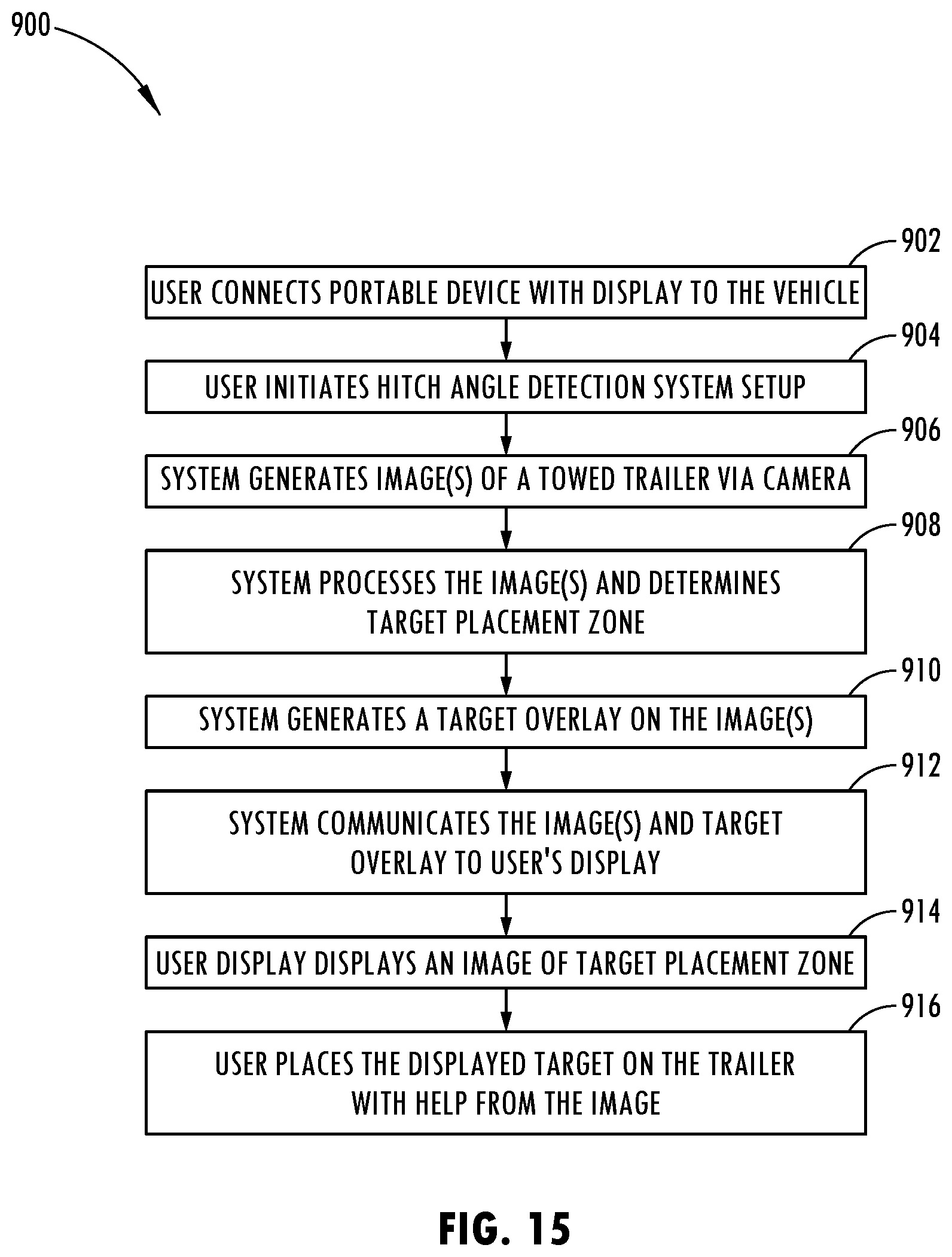
D00014
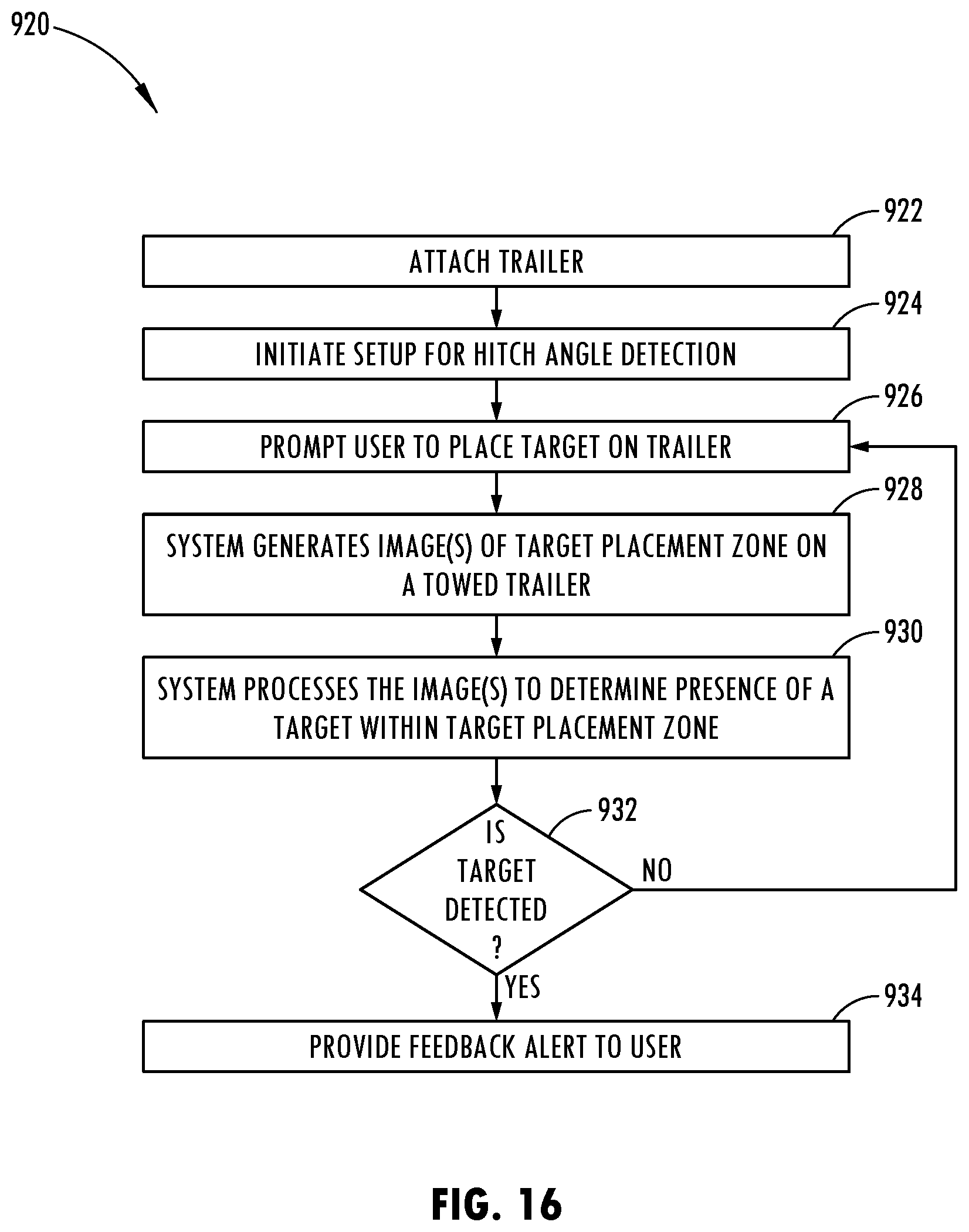
D00015

D00016
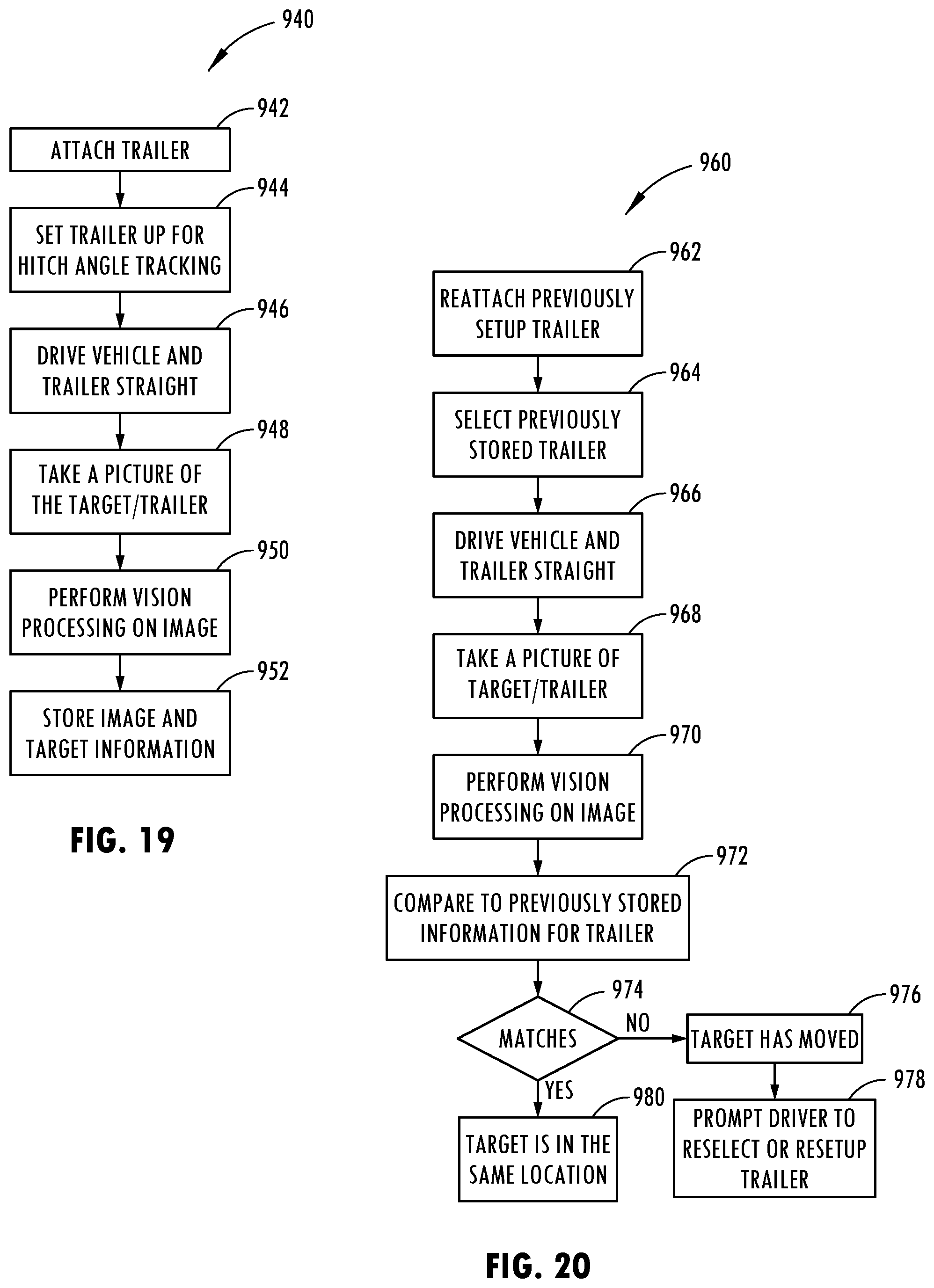
D00017

D00018

D00019

D00020
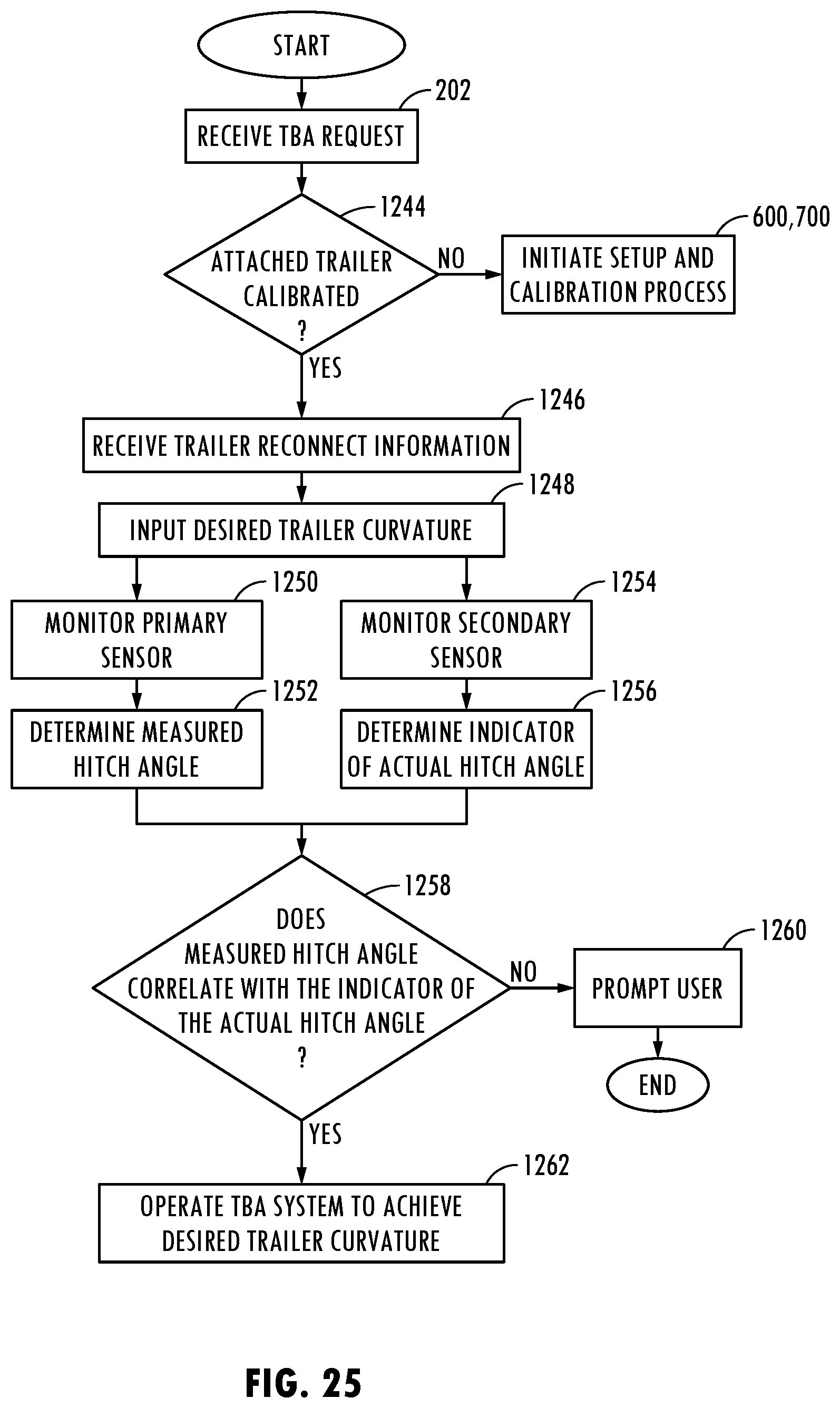
D00021
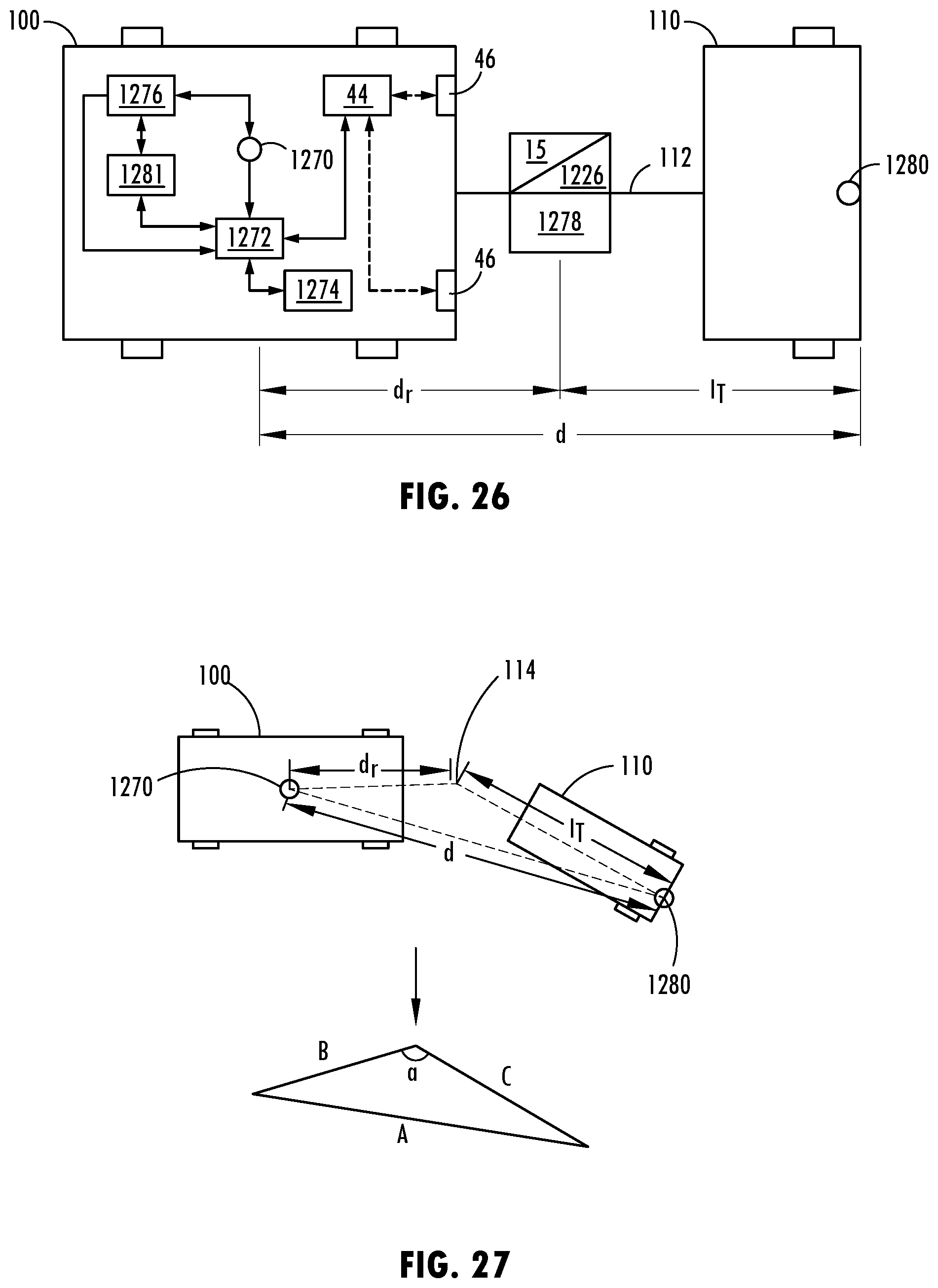
D00022

D00023
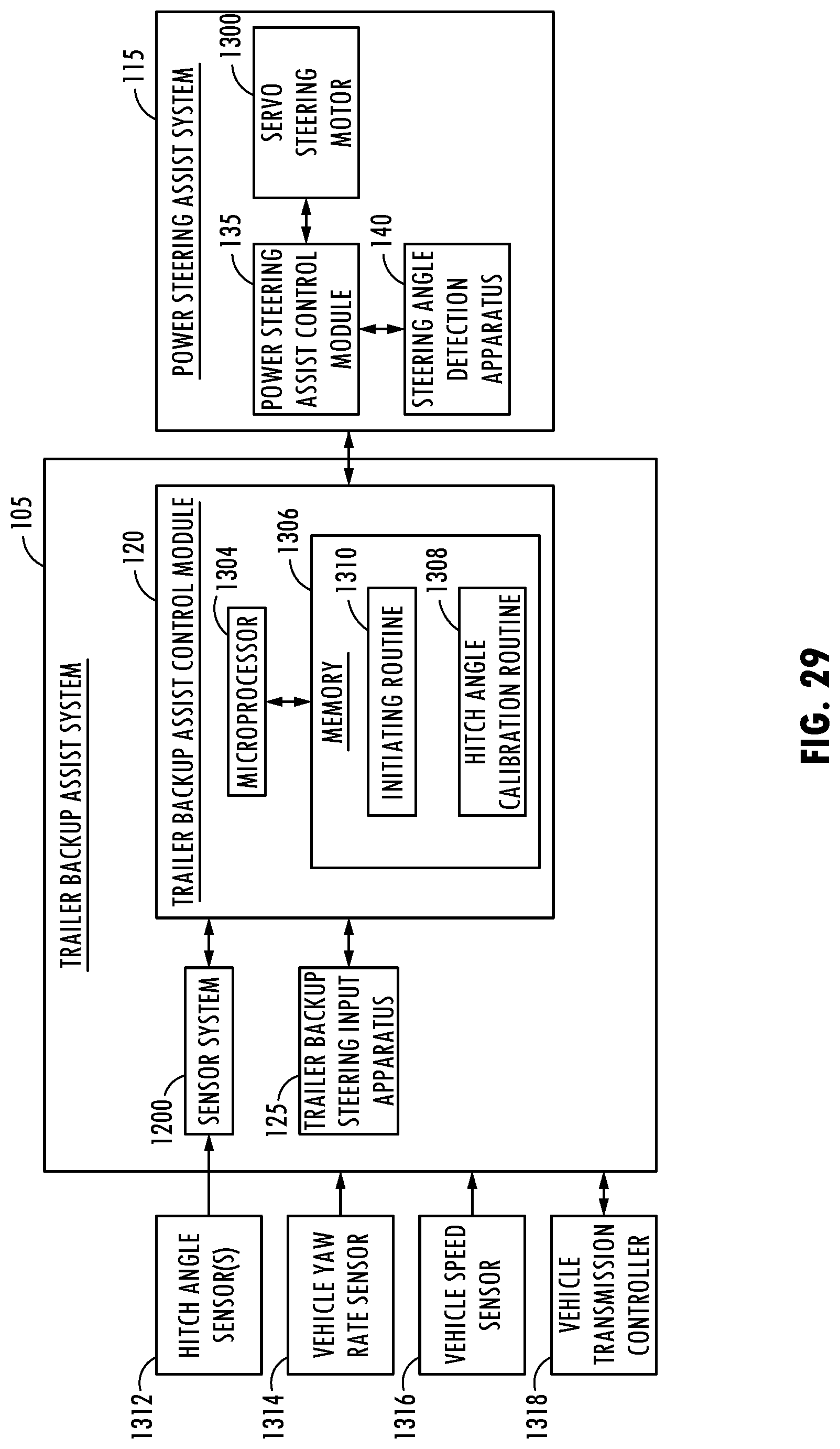
D00024

D00025
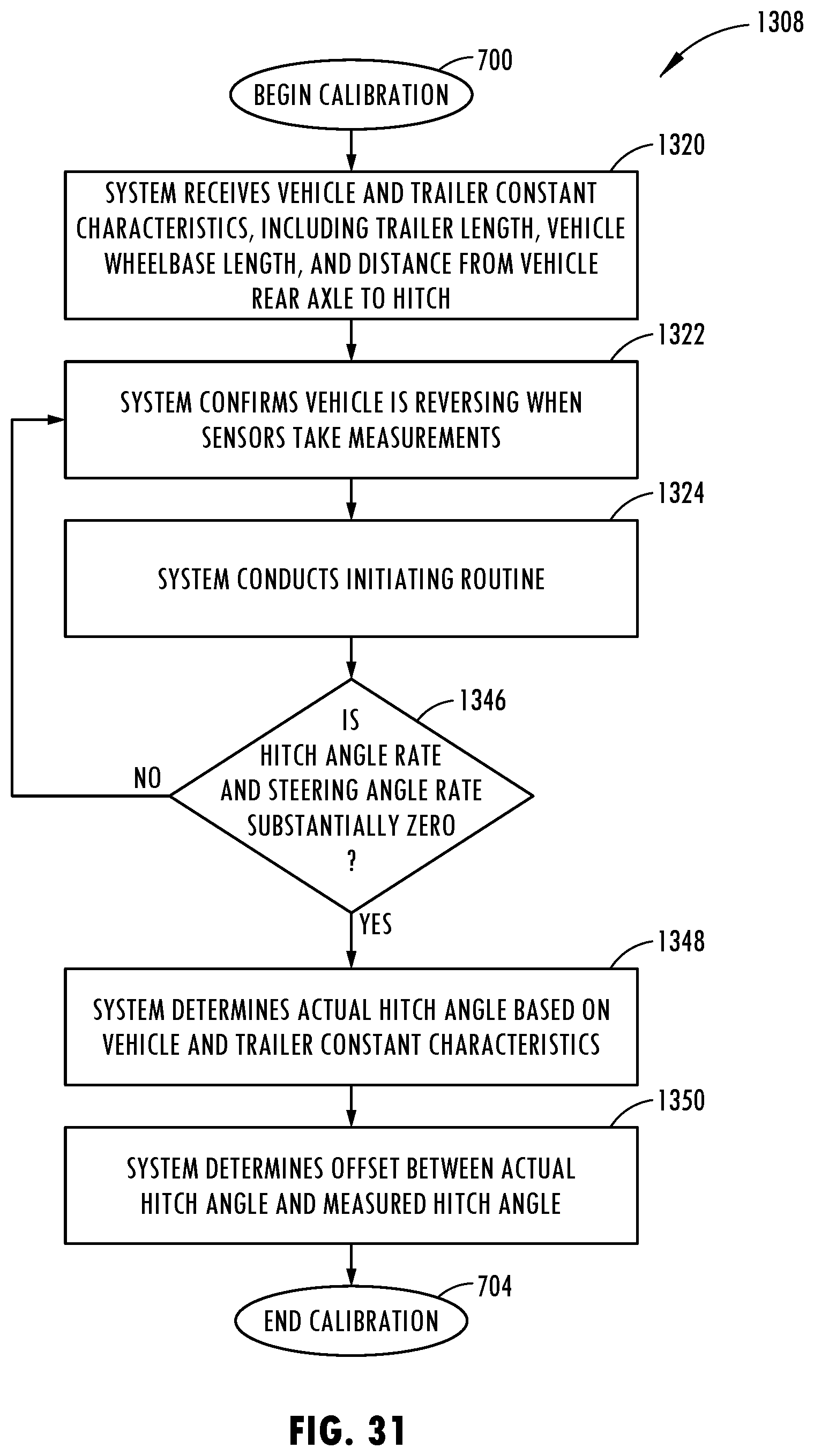
D00026

D00027
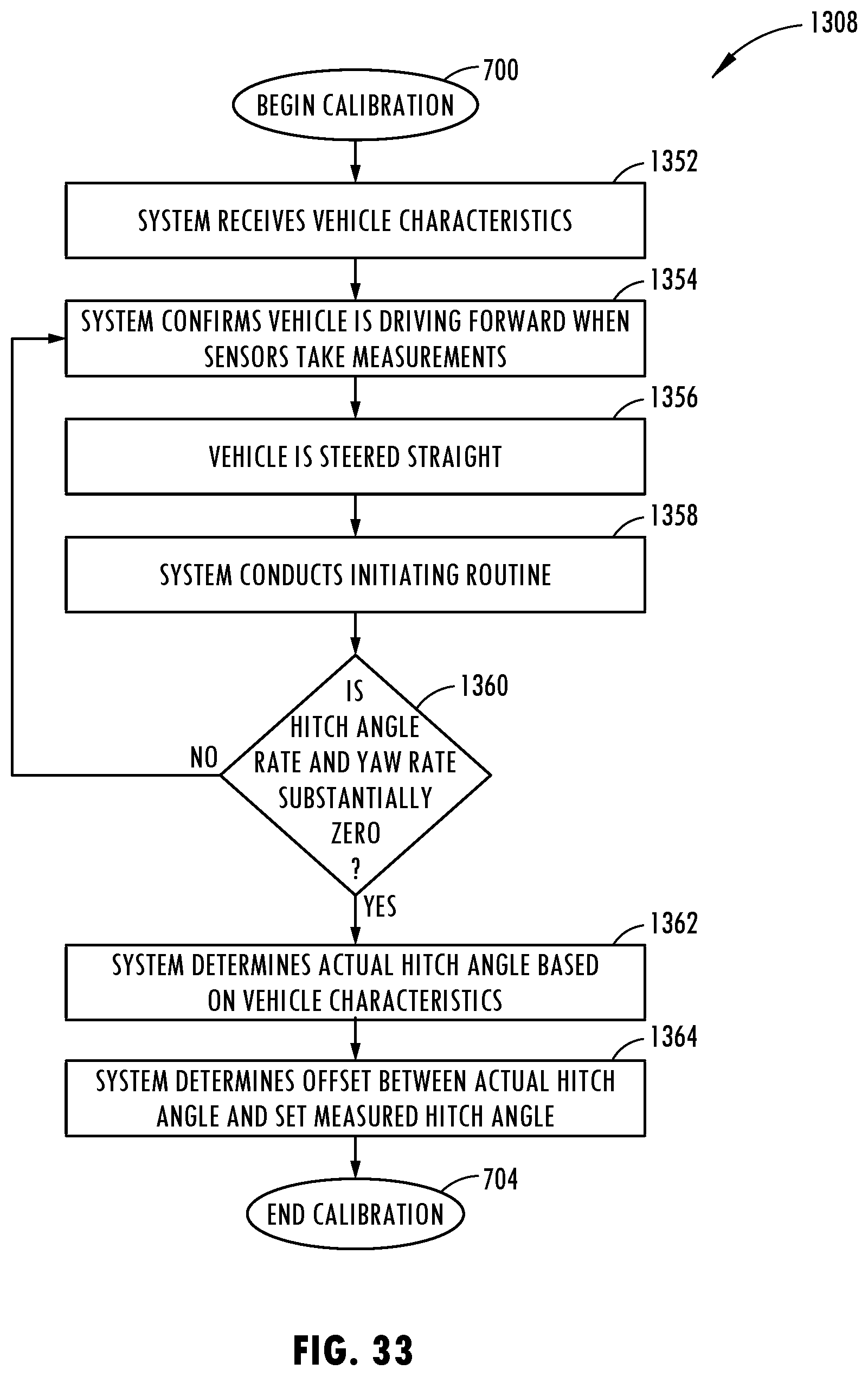
D00028

D00029
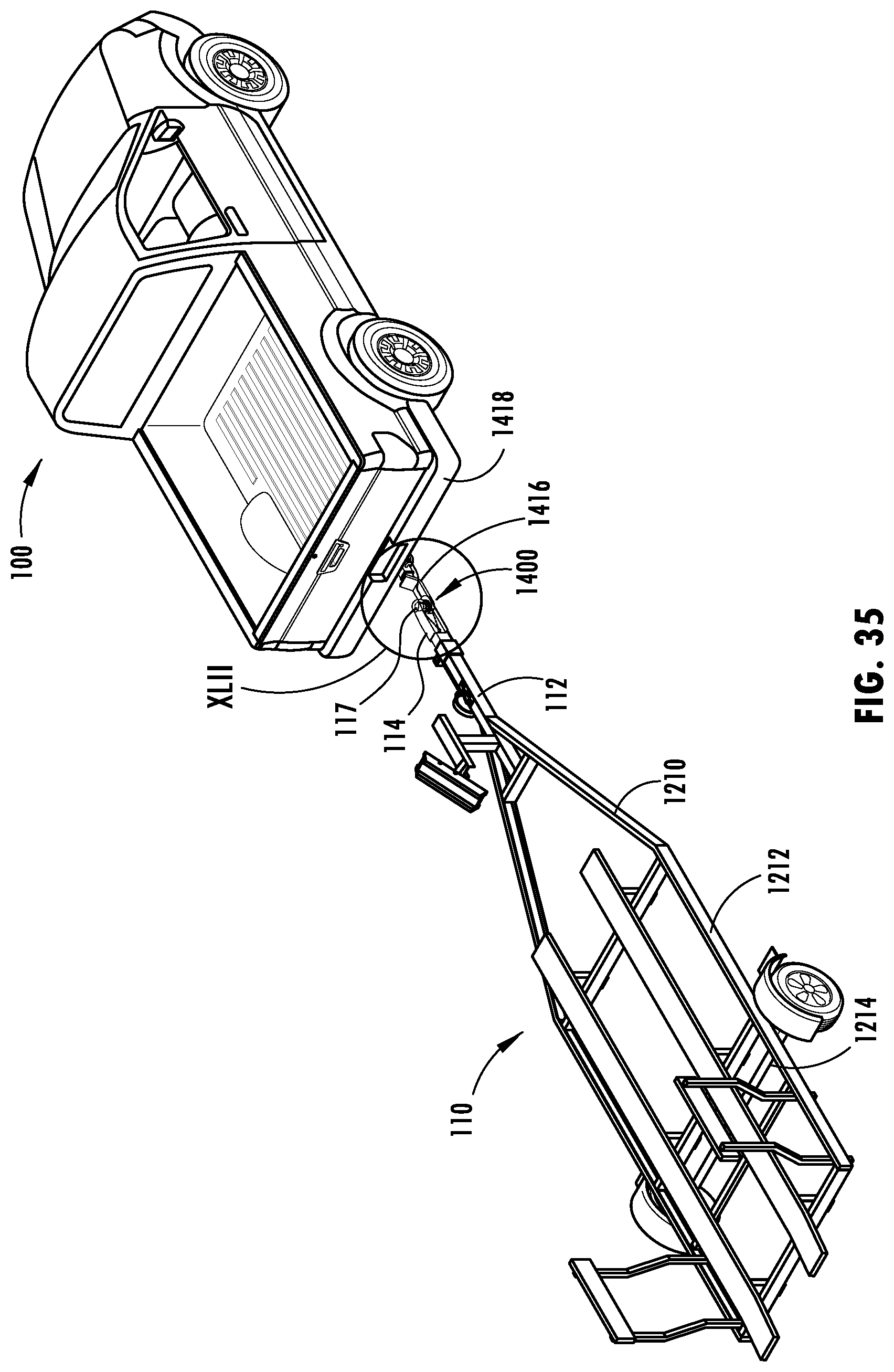
D00030
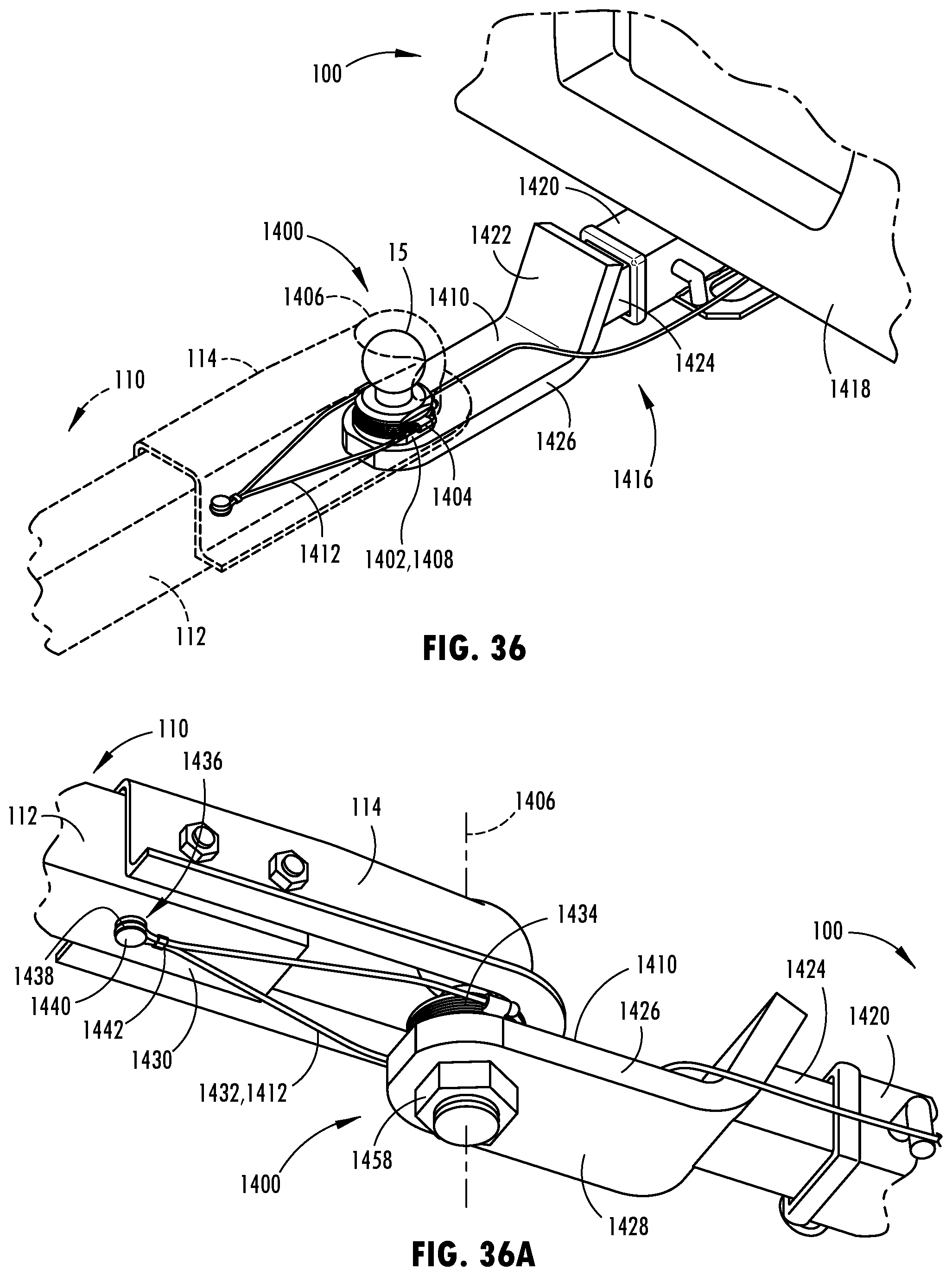
D00031
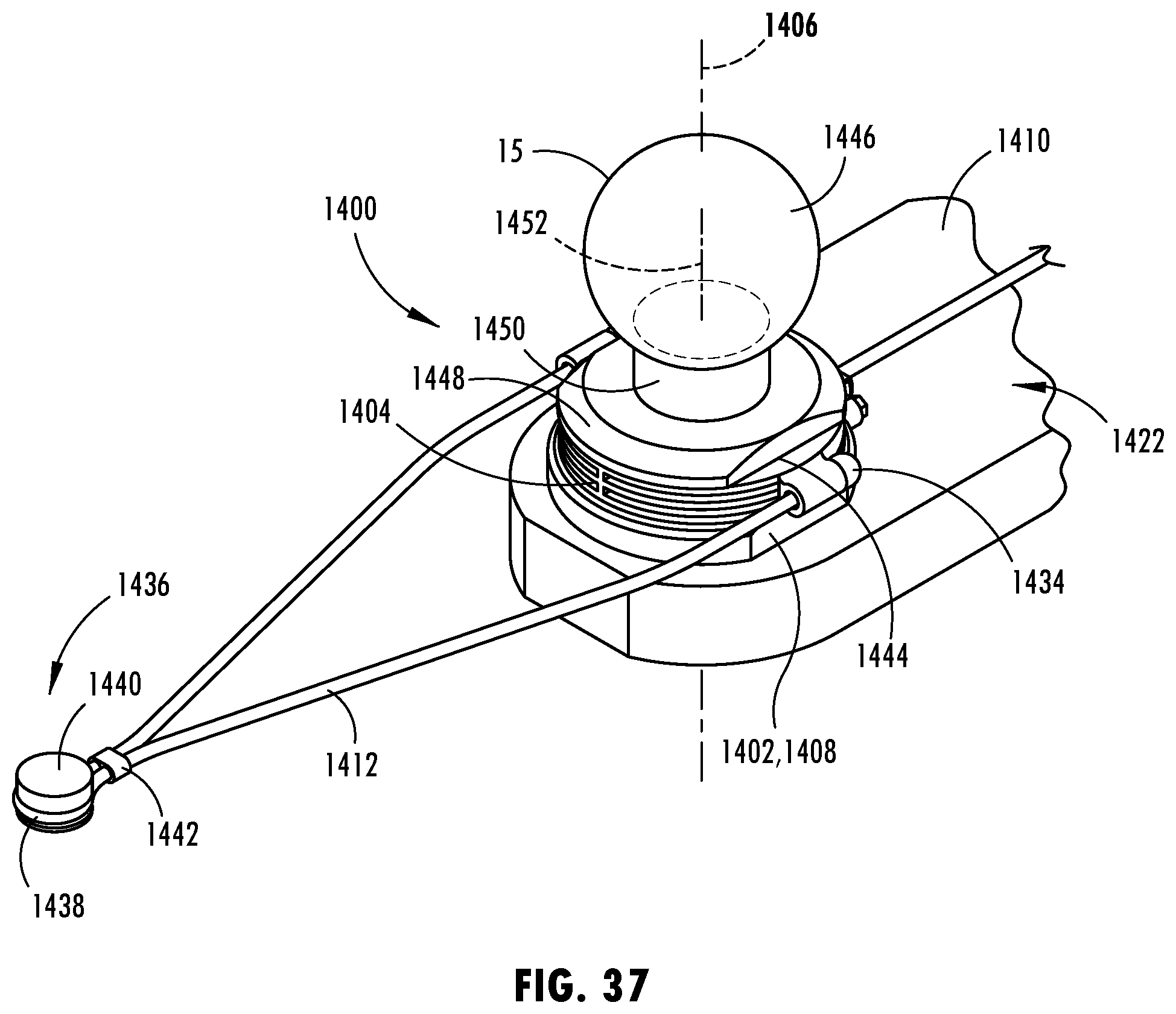
D00032
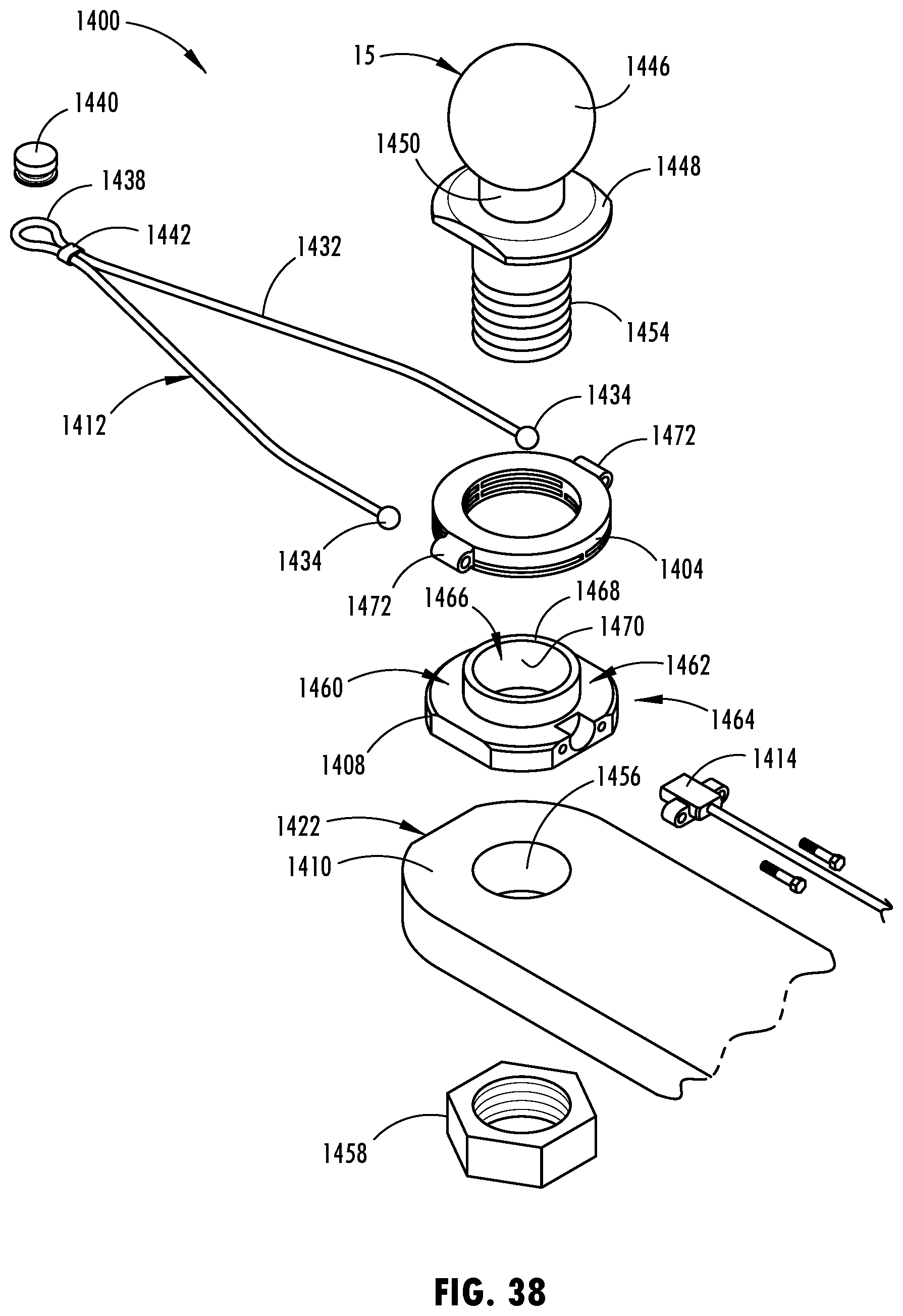
D00033

D00034
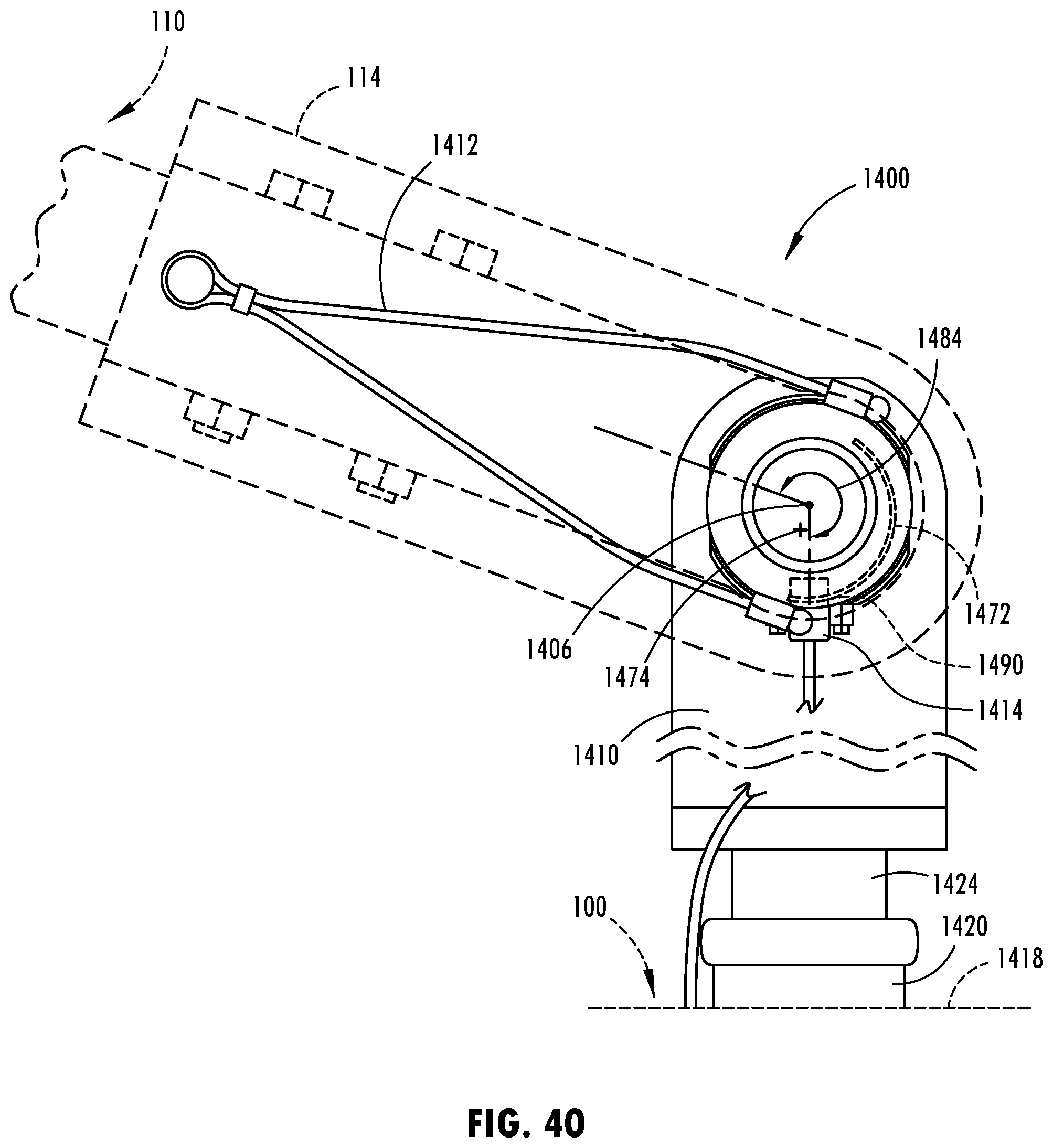
D00035
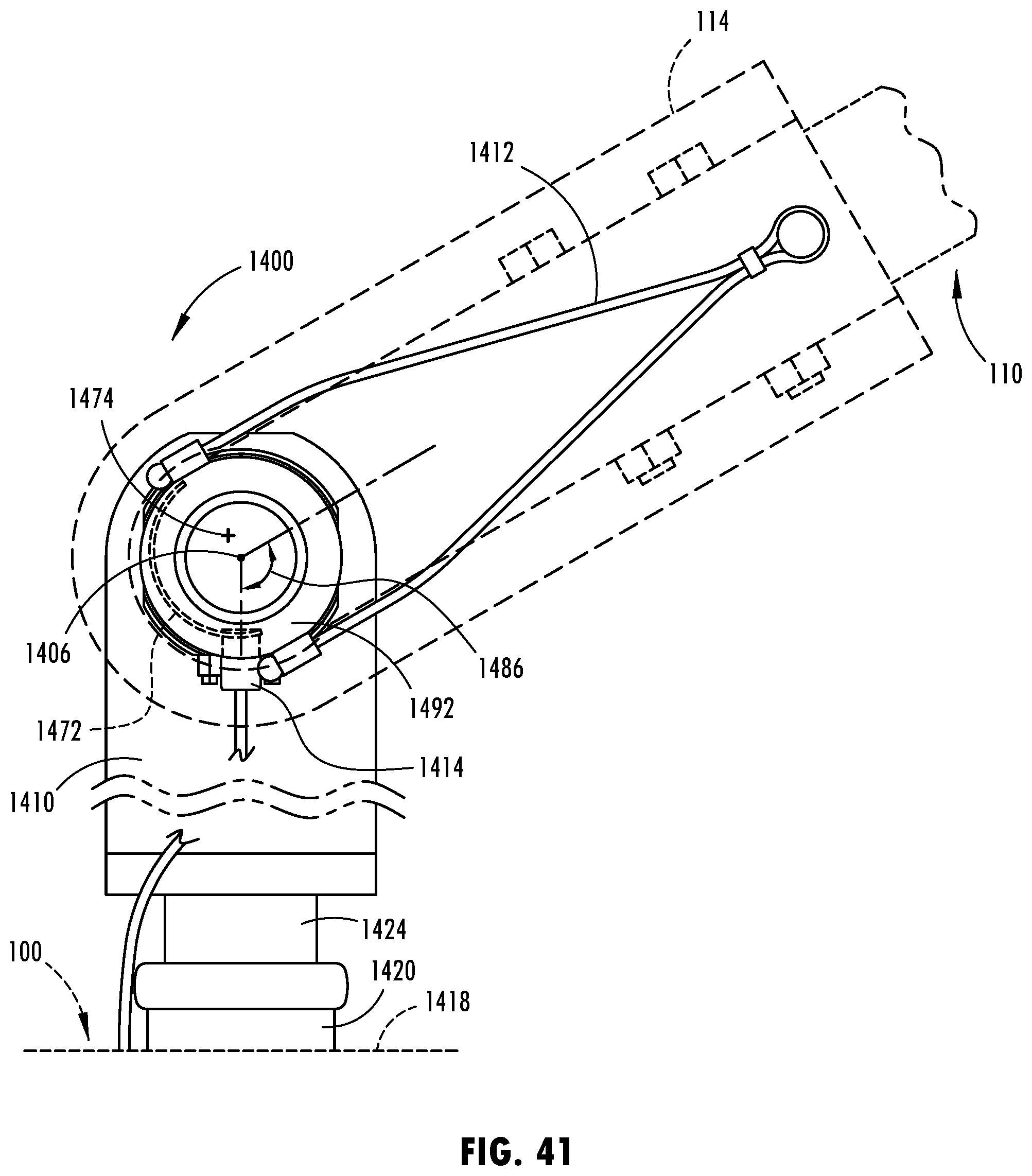
D00036

D00037
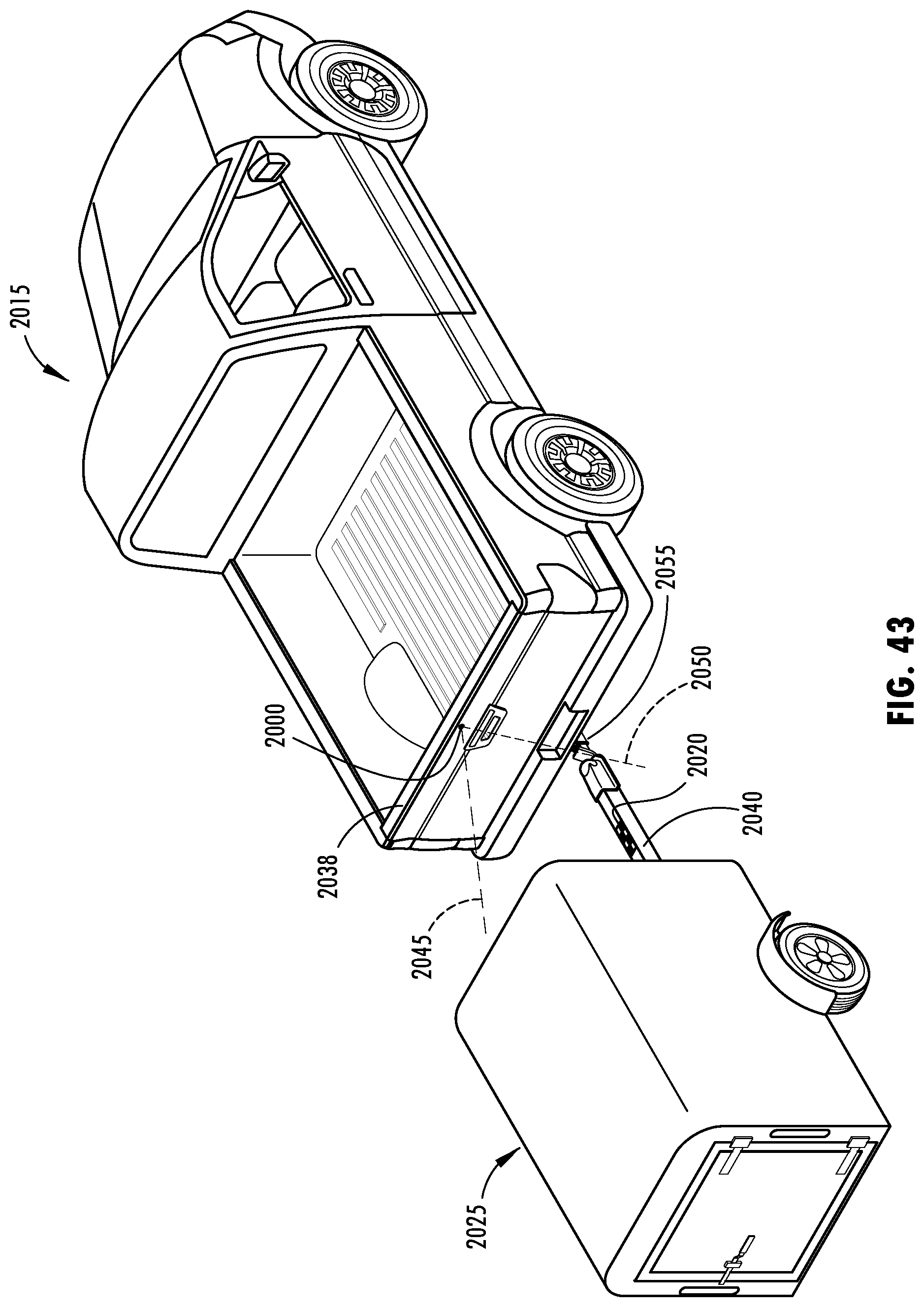
D00038
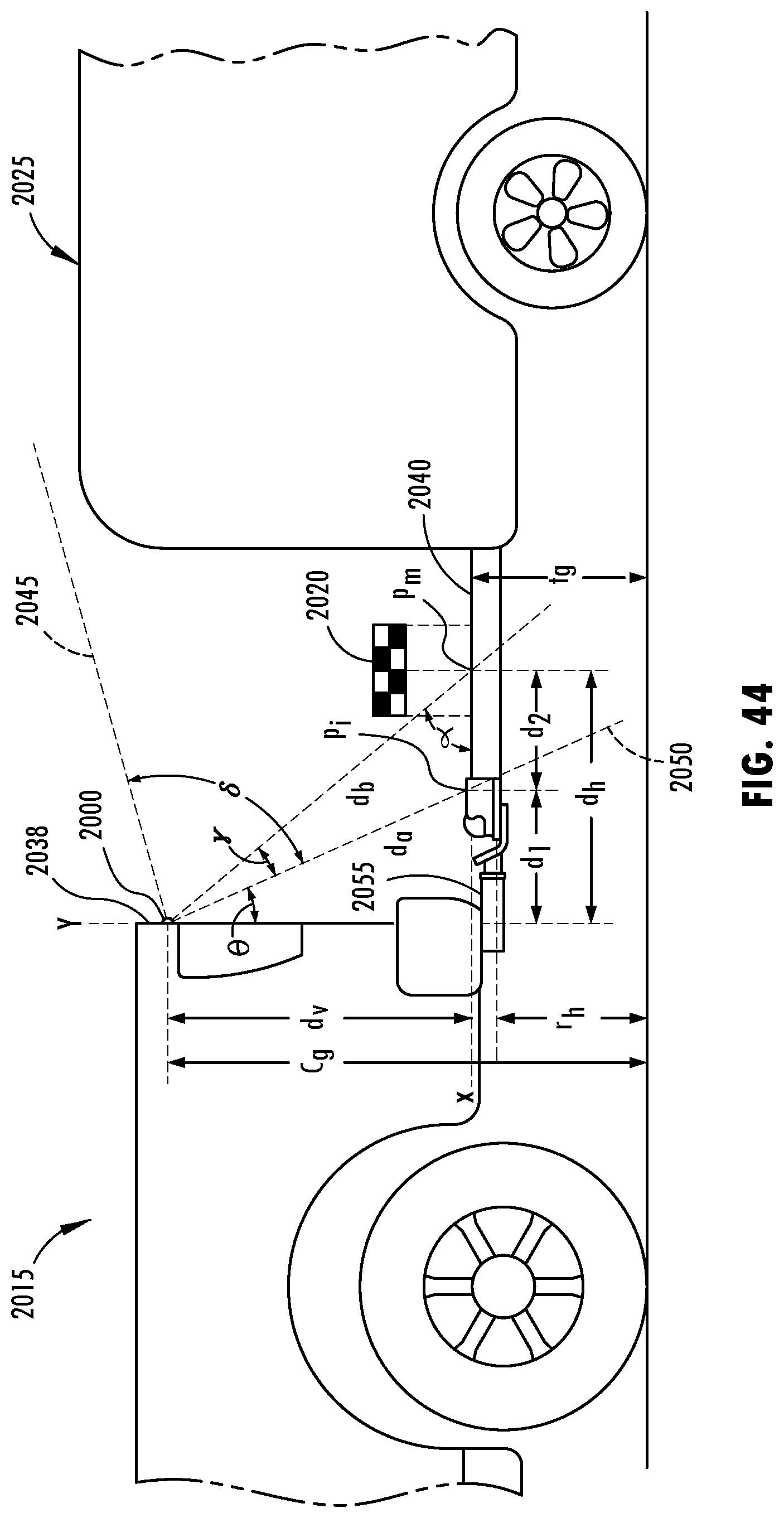
D00039

D00040
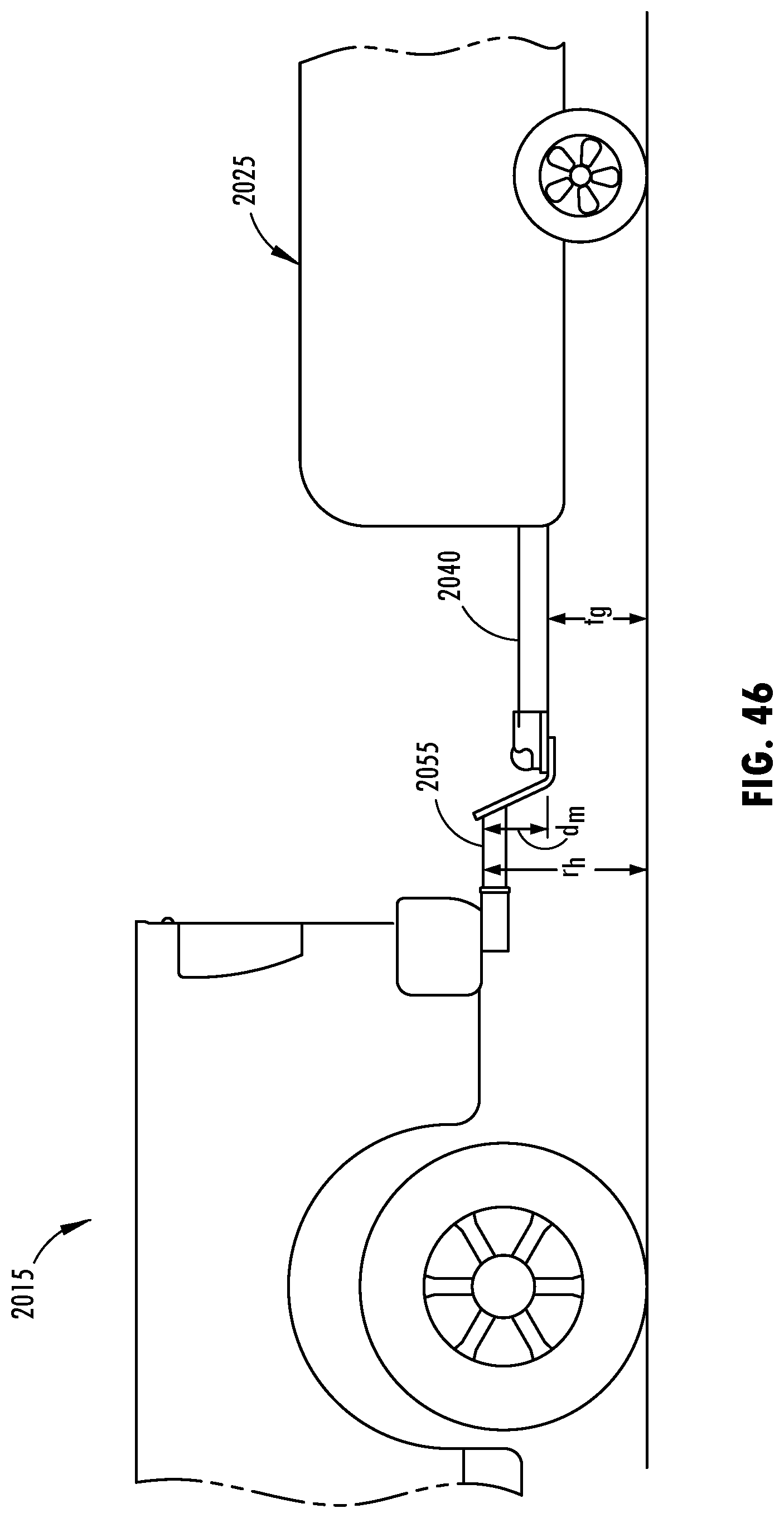
D00041

D00042

D00043
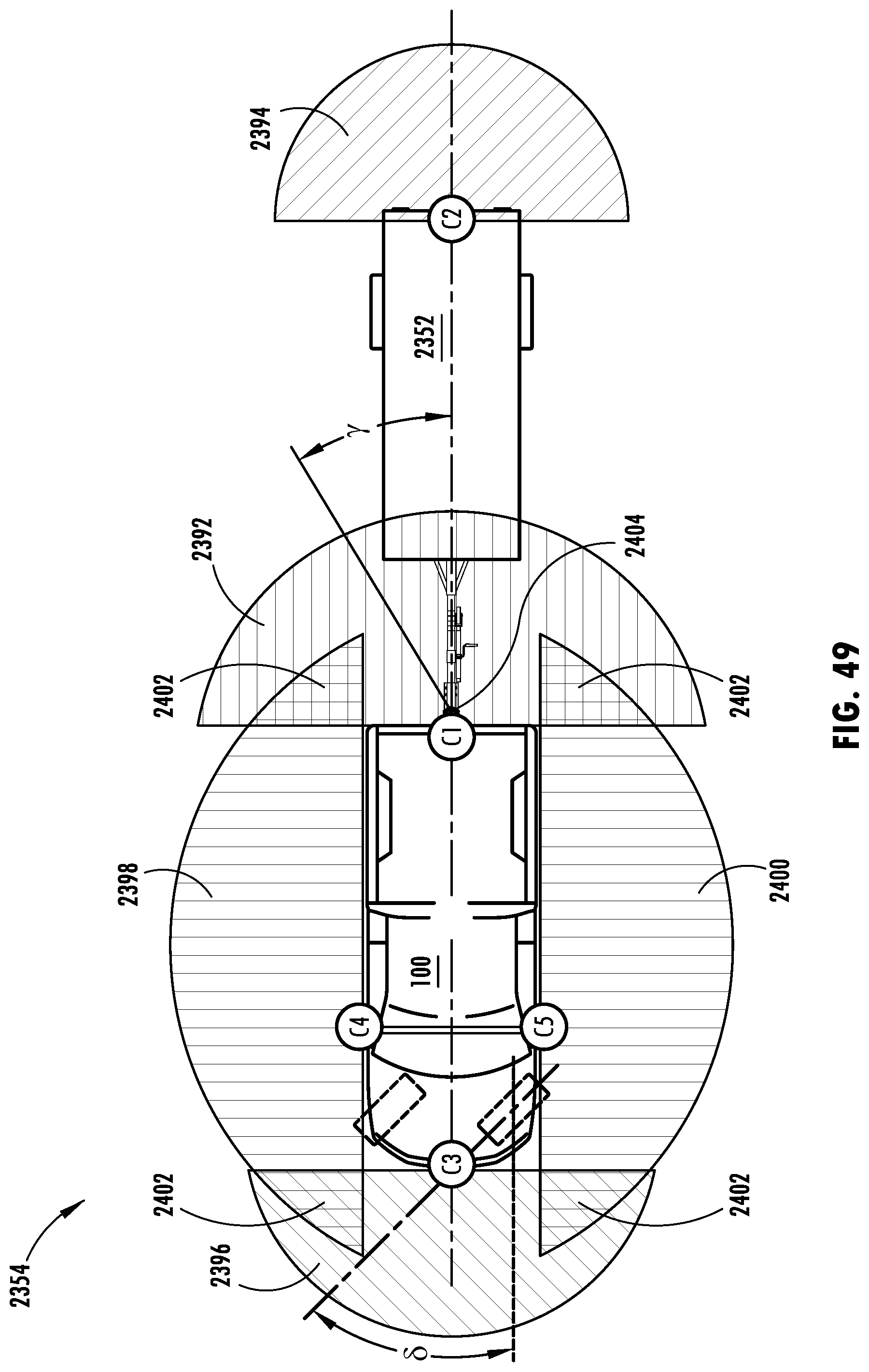
D00044
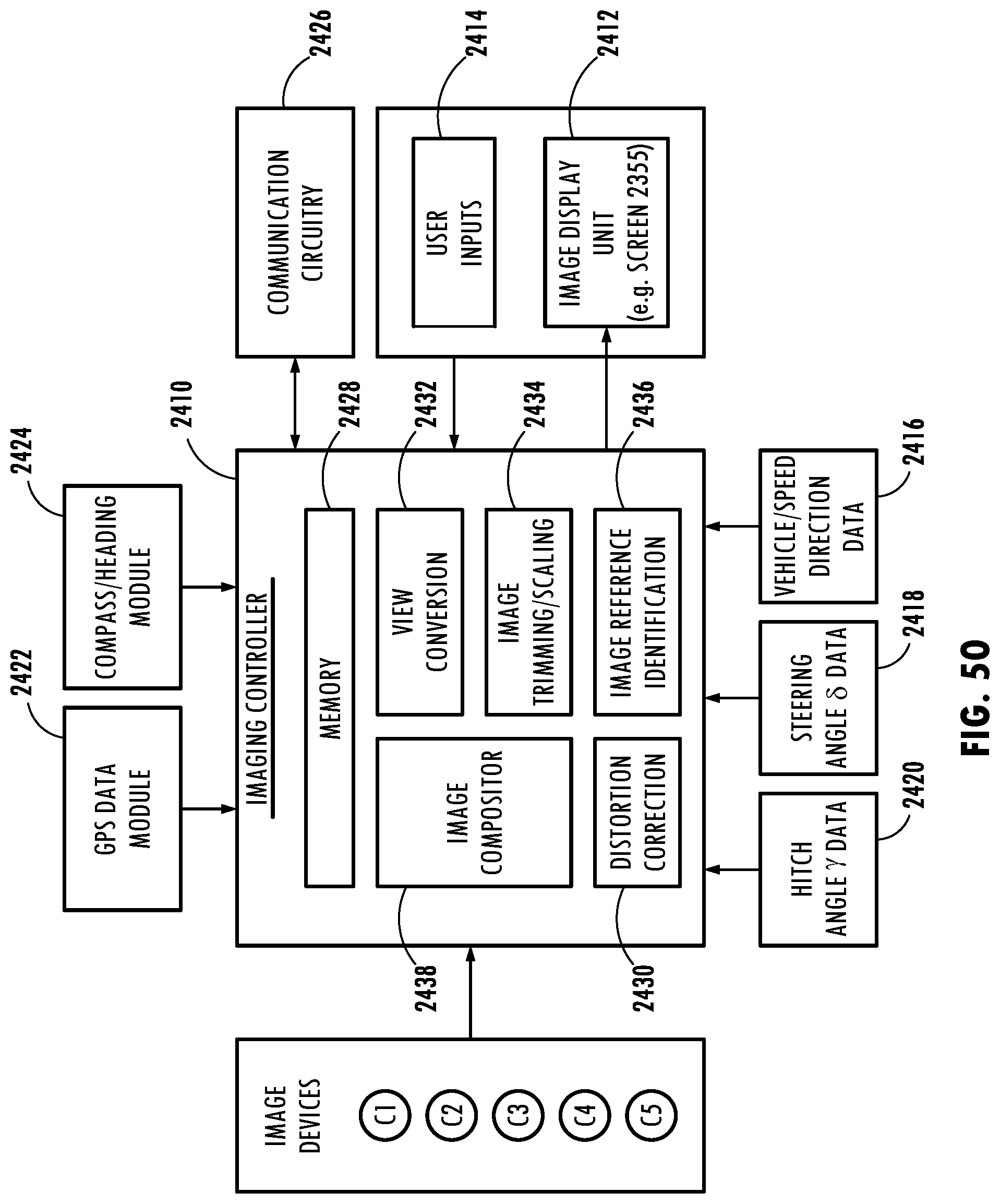
D00045

D00046
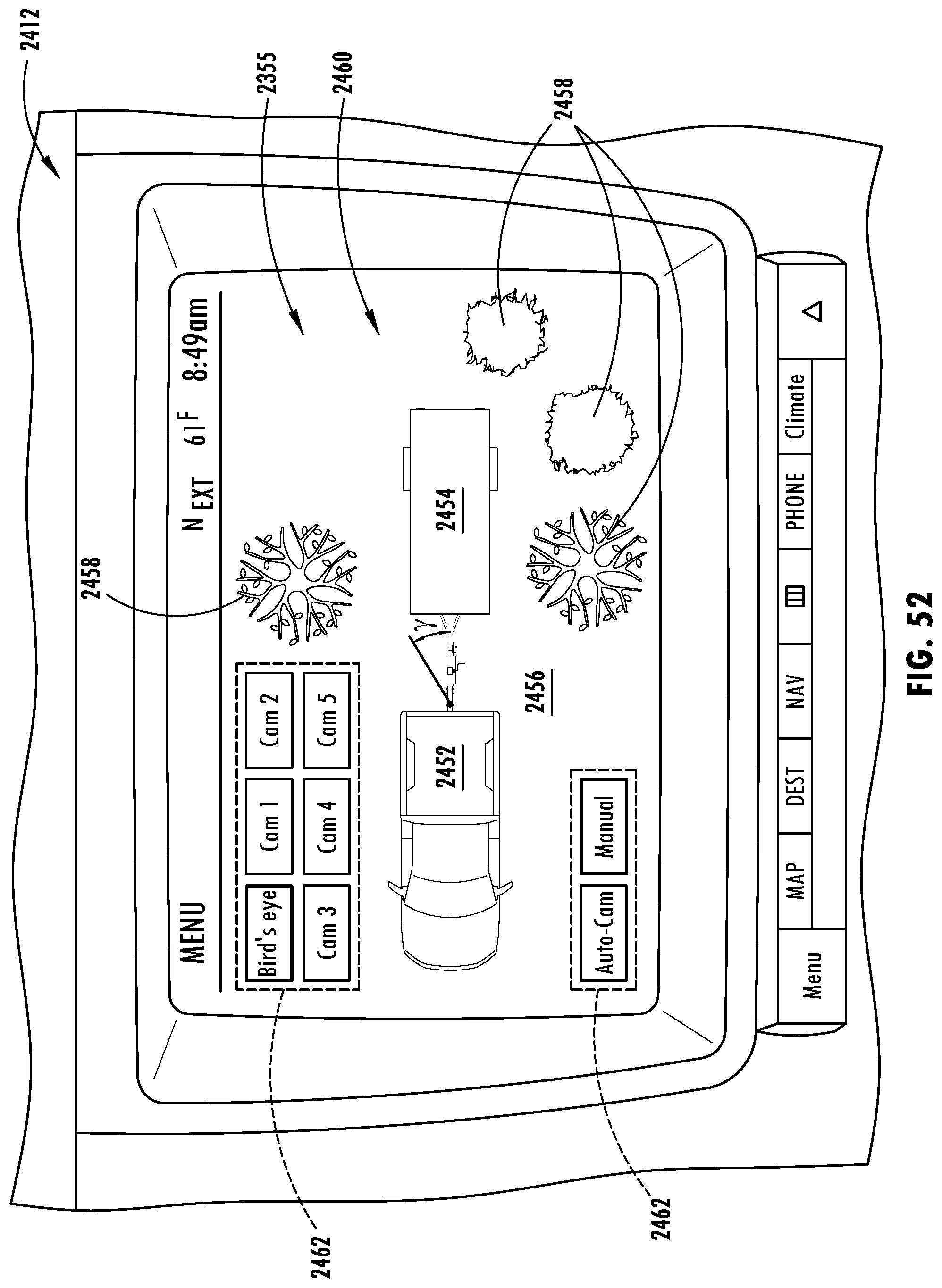
D00047
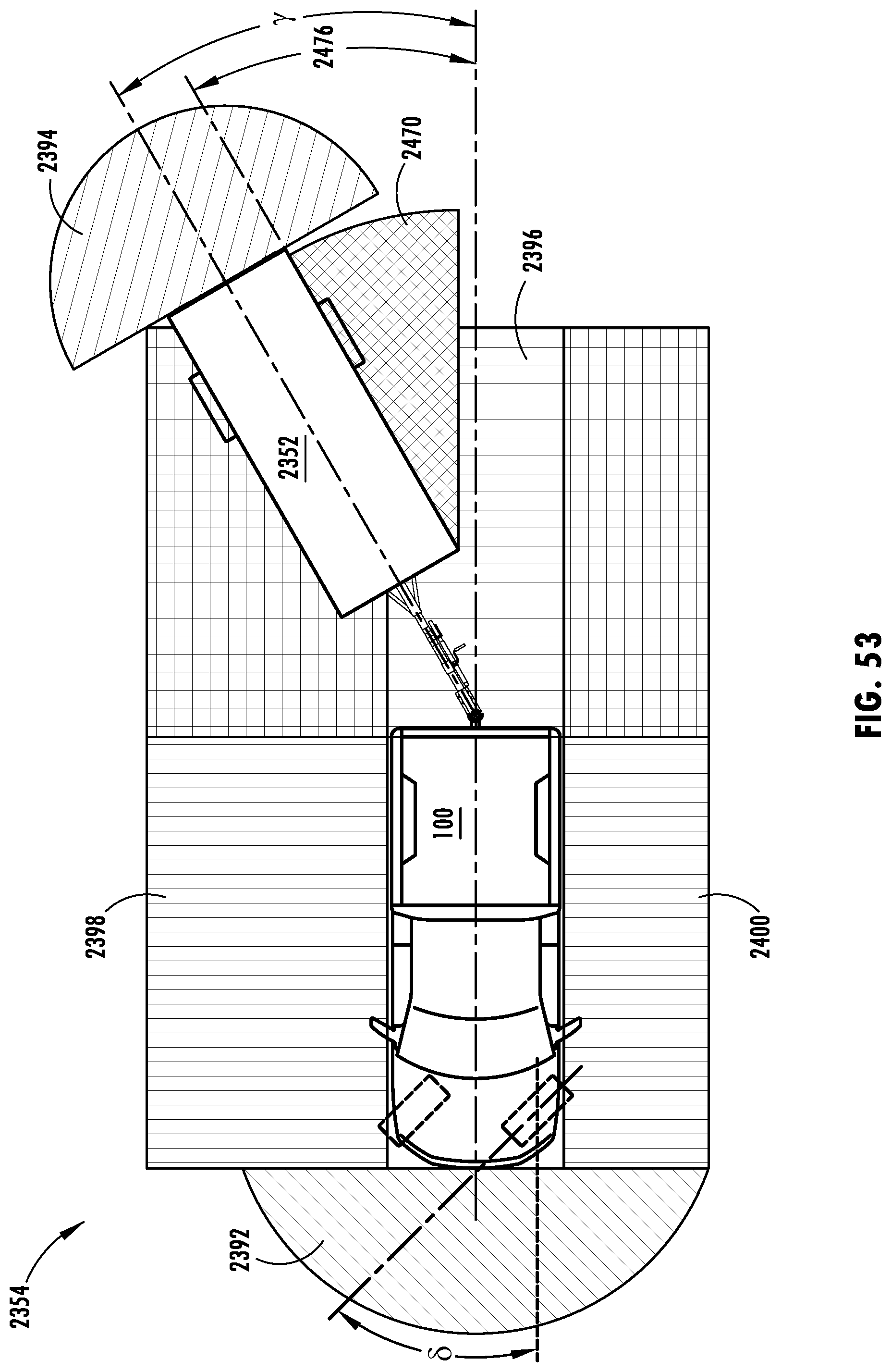
D00048
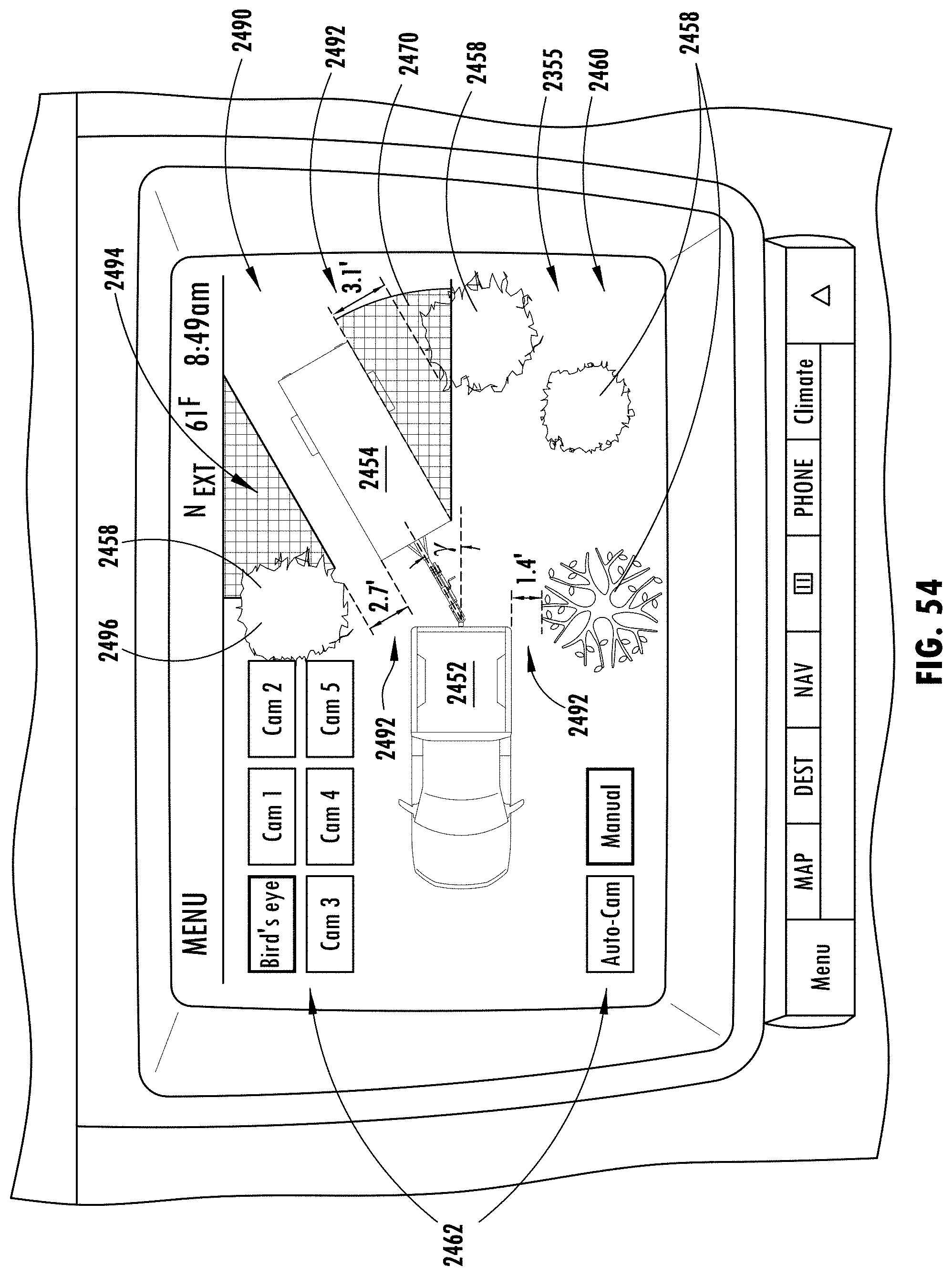
D00049
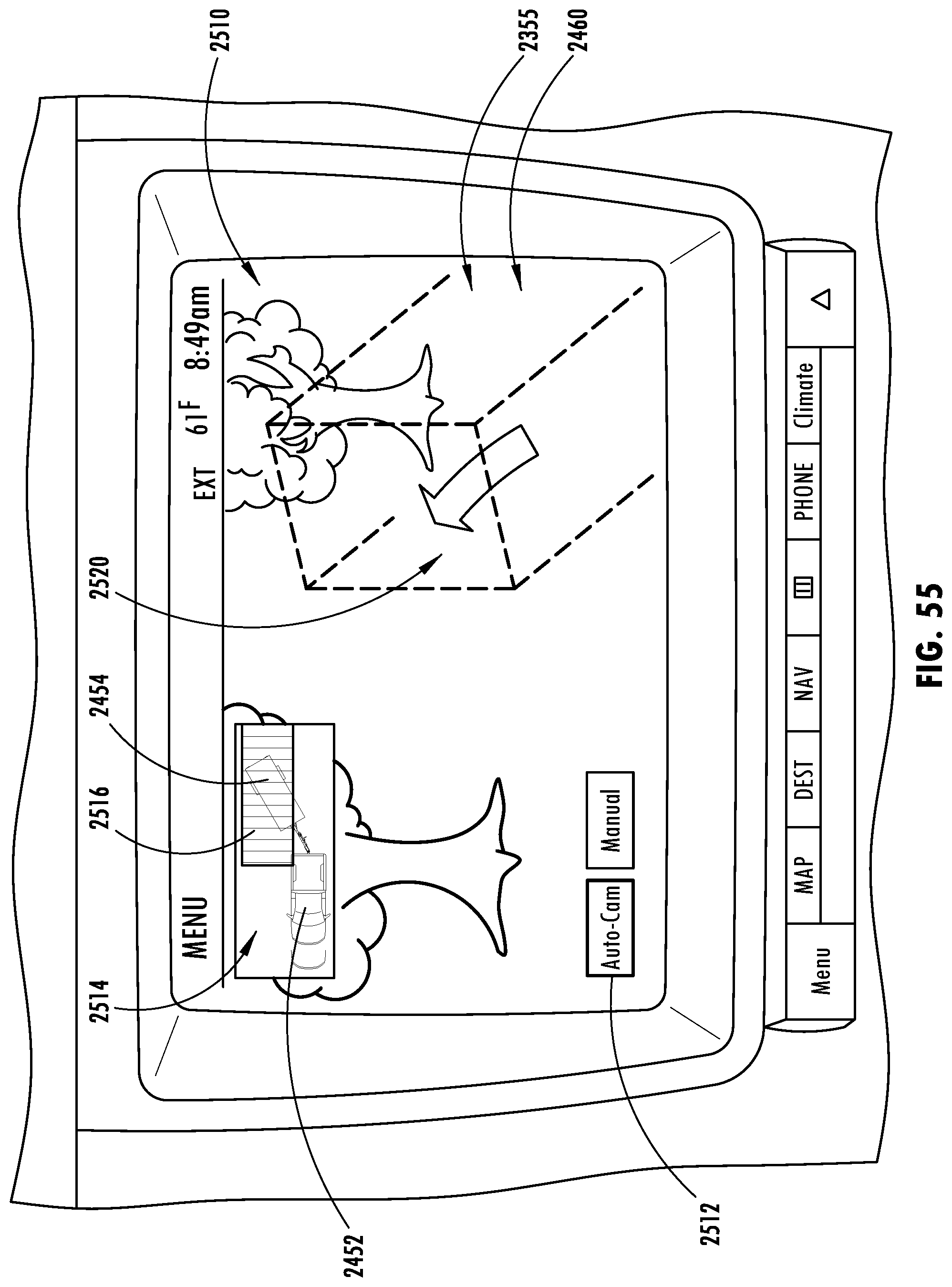
M00001

M00002

M00003

M00004
M00005

M00006

M00007

M00008

M00009

M00010

M00011

XML
uspto.report is an independent third-party trademark research tool that is not affiliated, endorsed, or sponsored by the United States Patent and Trademark Office (USPTO) or any other governmental organization. The information provided by uspto.report is based on publicly available data at the time of writing and is intended for informational purposes only.
While we strive to provide accurate and up-to-date information, we do not guarantee the accuracy, completeness, reliability, or suitability of the information displayed on this site. The use of this site is at your own risk. Any reliance you place on such information is therefore strictly at your own risk.
All official trademark data, including owner information, should be verified by visiting the official USPTO website at www.uspto.gov. This site is not intended to replace professional legal advice and should not be used as a substitute for consulting with a legal professional who is knowledgeable about trademark law.